V带传动设计说明书(含C语言源程序)
- 格式:pdf
- 大小:251.12 KB
- 文档页数:13
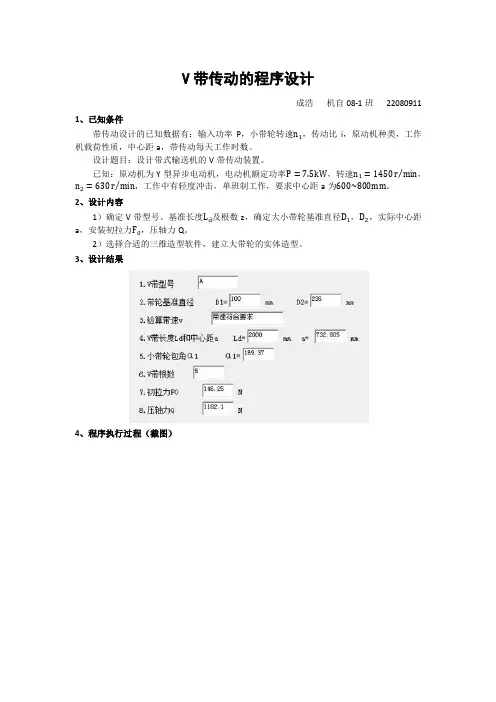
V带传动的程序设计成浩机自08-1班22080911 1、已知条件带传动设计的已知数据有:输入功率P,小带轮转速,传动比i,原动机种类,工作机载荷性质,中心距a,带传动每天工作时数。
设计题目:设计带式输送机的V带传动装置。
已知:原动机为Y型异步电动机,电动机额定功率,转速,,工作中有轻度冲击,单班制工作,要求中心距a为。
2、设计内容1)确定V带型号、基准长度及根数z,确定大小带轮基准直径,,实际中心距a,安装初拉力,压轴力Q。
2)选择合适的三维造型软件,建立大带轮的实体造型。
3、设计结果4、程序执行过程(截图)1、2、3、4、5、6、7、5、VB源程序:Private Sub Command1_Click() '导航窗口,开始新的计算Picture1.Visible = TrueEnd SubPrivate Sub Command10_Click()'计算功率Pc txt_pc.Text = CStr(Val(txt_ka) * Val(txt_p))End SubPrivate Sub Command11_Click()'调出工作情况系数表chaxun_ka.Visible = TrueEnd SubPrivate Sub Command12_Click() 'V带带轮最小基准直径和基准直径系列查询jizhunzhijing.Visible = TrueIf txt_xh.Text = "Z" Thentxt_jz.Text = "50, 56, 63, 71, 75, 80, 85, 90, 95, 100, 106, 112, 118, 125, 132, 140, 150, 160, 170, 180, 200, 212, 224, 236, 250, 265, 280, 300, 315, 355, 375, 400, 425, 450, 475, 500, 530, 560, 600, 630, 670, 710, 750, 800, 900, 1000"End IfIf txt_xh.Text = "A" Thentxt_jz.Text = "75, 80, 85, 90, 95, 100, 106, 112, 118, 125, 132, 140, 150, 160, 170, 180, 200, 212, 224, 236, 250, 265, 280, 300, 315, 355, 375, 400, 425, 450, 475, 500, 530, 560, 600, 630, 670, 710, 750, 800, 900, 1000"End IfIf txt_xh.Text = "B" Thentxt_jz.Text = "125, 132, 140, 150, 160, 170, 180, 200, 212, 224, 236, 250, 265, 280, 300, 315, 355, 375, 400, 425, 450, 475, 500, 530, 560, 600, 630, 670, 710, 750, 800, 900, 1000"End IfIf txt_xh.Text = "C" Thentxt_jz.Text = "200, 212, 224, 236, 250, 265, 280, 300, 315, 355, 375, 400, 425, 450, 475, 500, 530, 560, 600, 630, 670, 710, 750, 800, 900, 1000"End IfIf txt_xh.Text = "D" Thentxt_jz.Text = "355, 375, 400, 425, 450, 475, 500, 530, 560, 600, 630, 670, 710, 750, 800, 900, 1000"End IfIf txt_xh.Text = "E" Thentxt_jz.Text = "500, 530, 560, 600, 630, 670, 710, 750, 800, 900, 1000"End IfEnd SubPrivate Sub Command13_Click()'小带轮基准直径确定txt_d2j.Text = CStr(Format((Val(Text8.Text) * Val(txt_d1.T ext)), "#######.##"))'对小带轮转速n1进行圆整---------------------------------------------------------------------Dim i As IntegerDim n1 As Single, Y As Single, z As SingleDim n As VariantIf txt_xh.Text = "Z" Thenn = Array(400, 730, 800, 980, 1200, 1460, 1600, 2000, 2400, 2800, 3200)n1 = Val(txt_n1.Text)For i = 0 To 10If n1 <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 10If n1 <= n(i) ThenExit ForEnd IfNext iIf (n(i) - n1) <= (n1 - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End Iftxt_n1.Text = CStr(Y)ElseIf txt_xh.Text = "A" Thenn = Array(400, 730, 800, 980, 1200, 1460, 1600, 2000, 2400, 2800, 3200) n1 = Val(txt_n1.Text)For i = 0 To 10If n1 <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 10If n1 <= n(i) ThenExit ForEnd IfNext iIf (n(i) - n1) <= (n1 - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End Iftxt_n1.Text = CStr(Y)ElseIf txt_xh.Text = "B" Thenn = Array(400, 730, 800, 980, 1200, 1460, 1600, 2000, 2400, 2800, 3200)For i = 0 To 10If n1 <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 10If n1 <= n(i) ThenExit ForEnd IfNext iIf (n(i) - n1) <= (n1 - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End Iftxt_n1.Text = CStr(Y)ElseIf txt_xh.Text = "C" Thenn = Array(200, 300, 400, 500, 600, 730, 800, 980, 1200, 1460, 1600) n1 = Val(txt_n1.Text)For i = 0 To 10If n1 <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 10If n1 <= n(i) ThenExit ForEnd IfNext iIf (n(i) - n1) <= (n1 - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End IfElseIf txt_xh.Text = "D" Thenn = Array(200, 300, 400, 500, 600, 730, 800, 980, 1200, 1460, 1600) n1 = Val(txt_n1.Text)For i = 0 To 10If n1 <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 10If n1 <= n(i) ThenExit ForEnd IfNext iIf (n(i) - n1) <= (n1 - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End Iftxt_n1.Text = CStr(Y)ElseIf txt_xh.Text = "E" Thenn = Array(200, 300, 400, 500, 600, 730, 800, 980, 1200, 1460, 1600) n1 = Val(txt_n1.Text)For i = 0 To 10If n1 <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 10If n1 <= n(i) ThenExit ForEnd IfNext iIf (n(i) - n1) <= (n1 - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End Iftxt_n1.Text = CStr(Y)End IfEnd SubPrivate Sub Command14_Click()'圆整基准长度Ld Dim i As IntegerDim cd As Single, Y As Single, z As SingleDim n As Variantn = Array(400, 450, 500, 560, 630, 710, 800, 900, 1000, 1120, 1250, 1400, 1600, _1800, 2000, 2240, 2500, 2800, 3150, 3650, 4000, 4500, 5000, 5600, 6300, 7100, 8000, 9000, 10000)cd = Val(txt_lcd.Text)For i = 0 To 28If cd <= n(i) ThenExit ForEnd IfNext iY = n(i)For i = 1 To 28If cd <= n(i) ThenExit ForEnd IfNext iIf (n(i) - cd) <= (cd - n(i - 1)) Thenz = n(i)Elsez = n(i - 1)End Iftxt_ld.Text = CStr(Y)End SubPrivate Sub Command15_Click()'计算初定带长Dim pi As Doublepi = 3.1415926txt_lcd.Text = CStr(Format((2 * Val(txt_a0.Text) + (pi * (Val(txt_d1.Text) + Val(txt_d2.Text)) / 2) + ((Val(txt_d2.Text) - Val(txt_d1.Text)) ^ 2) / (4 * Val(txt_a0.Text))), "######.##"))End SubPrivate Sub Command16_Click()'计算实际中心距a txt_a.Text = CStr(Val(txt_a0.T ext) + (1 / 2) * (Val(txt_ld.Text) - Val(txt_lcd.Text)))End SubPrivate Sub Command17_Click()Picture5.Visible = FalsePicture10.Visible = TrueCommand5.Enabled = TrueEnd SubPrivate Sub Command19_Click()'计算带轮的包角α1 txt_bj.Text = CStr(Format((180 - (Val(txt_d2.Text) - Val(txt_d1.Text)) / Val(txt_a) * 57.3), "######.##"))End SubPrivate Sub Command2_Click()Picture2.Visible = FalsePicture5.Visible = FalsePicture10.Visible = FalsePicture12.Visible = FalsePicture1.Visible = FalseFrame1.Visible = TrueFrame12.Visible = FalseFrame25.Visible = FalseEnd SubPrivate Sub Command20_Click()'对小带轮包角α1进行圆整Dim i As IntegerDim cda As Single, w As Single, q As SingleDim n As Variantn = Array(70, 80, 90, 100, 110, 120, 130, 140, 150, 160, 170, 180)cda = Val(txt_bj.Text)For i = 0 To 11If cda <= n(i) ThenExit ForEnd IfNext iw = n(i)For i = 1 To 11If cda <= n(i) ThenExit ForEnd IfNext iIf (n(i) - cda) <= (cda - n(i - 1)) Thenq = n(i)Elseq = n(i - 1)End Iftxt_bjdz.Text = CStr(q)End SubPrivate Sub Command21_Click()'确定包角系数If Val(txt_bjdz.Text) = 70 ThenText16.Text = "0.58"ElseIf Val(txt_bjdz.Text) = 80 ThenText16.Text = "0.64"ElseIf Val(txt_bjdz.Text) = 90 ThenText16.Text = "0.69"ElseIf Val(txt_bjdz.Text) = 100 ThenText16.Text = "0.74"ElseIf Val(txt_bjdz.Text) = 110 ThenText16.Text = "0.78"ElseIf Val(txt_bjdz.Text) = 120 ThenText16.Text = "0.82"ElseIf Val(txt_bjdz.Text) = 130 ThenText16.Text = "0.86"ElseIf Val(txt_bjdz.Text) = 140 ThenText16.Text = "0.89"ElseIf Val(txt_bjdz.Text) = 150 ThenText16.Text = "0.92"ElseIf Val(txt_bjdz.Text) = 160 ThenText16.Text = "0.95"ElseIf Val(txt_bjdz.Text) = 170 ThenText16.Text = "0.98"ElseIf Val(txt_bjdz.Text) = 180 ThenText16.Text = "1.00"End IfEnd SubPrivate Sub Command22_Click()'单根V带试验条件下许用功率Dim v As Integer, pi As Integer, d1 As Integer, p0 As Variantpi = 3.1415926v = pi * Val(txt_d1.Text) * Val(txt_n1.Text) / 60000d1 = Val(txt_d1.Text)If txt_xh.Text = "Z" Thenp0 = (0.246 * v ^ (-0.09) - 7.44 / d1 - 0.441 * ((10) ^ (-4)) * (v ^ 2)) * vElseIf txt_xh.Text = "A" Thenp0 = (0.449 * v ^ (-0.09) - 19.62 / d1 - 0.765 * ((10) ^ (-4)) * (v ^ 2)) * vElseIf txt_xh.Text = "B" Thenp0 = (0.794 * v ^ (-0.09) - 50.6 / d1 - 1.31 * ((10) ^ (-4)) * (v ^ 2)) * vElseIf txt_xh.Text = "C" Thenp0 = (1.48 * v ^ (-0.09) - 143.2 / d1 - 2.34 * ((10) ^ (-4)) * (v ^ 2)) * vElseIf txt_xh.Text = "D" Thenp0 = (3.15 * v ^ (-0.09) - 507.3 / d1 - 4.77 * ((10) ^ (-4)) * (v ^ 2)) * vElseIf txt_xh.Text = "E" Thenp0 = (4.57 * v ^ (-0.09) - 951.5 / d1 - 7.06 * ((10) ^ (-4)) * (v ^ 2)) * vEnd IfText17.Text = CStr(Format(p0, "######.##"))End SubPrivate Sub Command23_Click()'传递功率的增量值△P0 If txt_xh.Text = "Z" ThenIf Val(Text8.Text) >= 1.365 And Val(Text8.Text) <= 1.51 Then 'Z型号表第一行If Val(txt_n1.Text) = 400 Or 730 Or 800 ThenText18.Text = "0.01"ElseIf Val(txt_n1.Text) = 980 Or 1200 Or 1460 Or 1600 ThenText18.Text = "0.02"ElseIf Val(txt_n1.Text) = 2000 Or 2400 ThenText18.Text = "0.03"ElseIf Val(txt_n1.Text) = 2800 Or 3200 ThenText18.Text = "0.04"End IfEnd IfIf Val(Text8.T ext) >= 2 Then 'Z型号表第二行If Val(txt_n1.Text) = 400 ThenText18.Text = "0.01"ElseIf Val(txt_n1.Text) = 730 Or 800 Or 980 ThenText18.Text = "0.02"ElseIf Val(txt_n1.Text) = 1200 Or 1460 Or 1600 ThenText18.Text = "0.03"ElseIf Val(txt_n1.Text) = 2000 Or 2400 Or 2800 ThenText18.Text = "0.04"ElseIf Val(txt_n1.Text) = 3200 ThenText18.Text = "0.05"End IfEnd IfEnd IfIf txt_xh.Text = "A" ThenIf Val(Text8.Text) >= 1.35 And Val(Text8.Text) <= 1.51 Then 'A型号表第一行If Val(txt_n1.Text) = 400 ThenText18.Text = "0.04"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "0.07"ElseIf Val(txt_n1.Text) = 800 Or 980 ThenText18.Text = "0.08"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "0.11"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "0.13"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "0.15"ElseIf Val(txt_n1.Text) = 2000 ThenText18.Text = "0.19"ElseIf Val(txt_n1.Text) = 2400 ThenText18.Text = "0.23"ElseIf Val(txt_n1.Text) = 2800 ThenText18.Text = "0.26"ElseIf Val(txt_n1.Text) = 3200 ThenText18.Text = "0.30"End IfEnd IfIf Val(Text8.T ext) >= 2 Then 'A型号表第二行If Val(txt_n1.Text) = 400 ThenText18.Text = "0.05"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "0.09"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "0.10"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "0.11"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "0.15"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "0.17"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "0.19"ElseIf Val(txt_n1.Text) = 2000 ThenText18.Text = "0.24"ElseIf Val(txt_n1.Text) = 2400 ThenText18.Text = "0.29"ElseIf Val(txt_n1.Text) = 2800 ThenText18.Text = "0.34"ElseIf Val(txt_n1.Text) = 3200 ThenText18.Text = "0.39"End IfEnd IfEnd IfIf txt_xh.Text = "B" ThenIf Val(Text8.Text) >= 1.35 And Val(Text8.Text) <= 1.51 Then 'B型号表第一行If Val(txt_n1.Text) = 400 ThenText18.Text = "0.10"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "0.17"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "0.20"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "0.23"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "0.30"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "0.36"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "0.39"ElseIf Val(txt_n1.Text) = 2000 ThenText18.Text = "0.49"ElseIf Val(txt_n1.Text) = 2400 ThenText18.Text = "0.59"ElseIf Val(txt_n1.Text) = 2800 ThenText18.Text = "0.69"ElseIf Val(txt_n1.Text) = 3200 ThenText18.Text = "0.79"End IfEnd IfIf Val(Text8.T ext) >= 2 Then 'B型号表第二行If Val(txt_n1.Text) = 400 ThenText18.Text = "0.13"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "0.22"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "0.25"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "0.30"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "0.38"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "0.46"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "0.51"ElseIf Val(txt_n1.Text) = 2000 ThenText18.Text = "0.63"ElseIf Val(txt_n1.Text) = 2400 ThenText18.Text = "0.76"ElseIf Val(txt_n1.Text) = 2800 ThenText18.Text = "0.89"ElseIf Val(txt_n1.Text) = 3200 ThenText18.Text = "1.01"End IfEnd IfEnd IfIf txt_xh.Text = "C" ThenIf Val(Text8.Text) >= 1.354 And Val(Text8.Text) <= 1.51 Then 'C型号表第一行If Val(txt_n1.Text) = 200 ThenText18.Text = "0.14"ElseIf Val(txt_n1.Text) = 300 ThenText18.Text = "0.21"ElseIf Val(txt_n1.Text) = 400 ThenText18.Text = "0.27"ElseIf Val(txt_n1.Text) = 500 ThenText18.Text = "0.34"ElseIf Val(txt_n1.Text) = 600 ThenText18.Text = "0.41"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "0.48"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "0.55"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "0.65"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "0.82"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "0.99"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "1.10"End IfEnd IfIf Val(Text8.T ext) >= 2 Then 'C型号表第二行If Val(txt_n1.Text) = 200 ThenText18.Text = "0.18"ElseIf Val(txt_n1.Text) = 300 ThenText18.Text = "0.26"ElseIf Val(txt_n1.Text) = 400 ThenText18.Text = "0.35"ElseIf Val(txt_n1.Text) = 500 ThenText18.Text = "0.44"ElseIf Val(txt_n1.Text) = 600 ThenText18.Text = "0.53"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "0.62"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "0.71"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "0.83"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "1.06"Text18.Text = "1.27"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "1.41"End IfEnd IfEnd IfIf txt_xh.Text = "D" ThenIf Val(Text8.Text) >= 1.35 And Val(Text8.Text) <= 1.51 Then 'D型号表第一行If Val(txt_n1.Text) = 200 ThenText18.Text = "0.49"ElseIf Val(txt_n1.Text) = 300 ThenText18.Text = "0.73"ElseIf Val(txt_n1.Text) = 400 ThenText18.Text = "0.97"ElseIf Val(txt_n1.Text) = 500 ThenText18.Text = "1.22"ElseIf Val(txt_n1.Text) = 600 ThenText18.Text = "1.46"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "1.70"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "1.95"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "2.31"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "2.92"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "3.52"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "3.89"End IfEnd IfIf Val(Text8.T ext) >= 2 Then 'D型号表第二行If Val(txt_n1.Text) = 200 ThenText18.Text = "0.63"ElseIf Val(txt_n1.Text) = 300 ThenText18.Text = "0.94"ElseIf Val(txt_n1.Text) = 400 ThenText18.Text = "1.25"Text18.Text = "1.56"ElseIf Val(txt_n1.Text) = 600 ThenText18.Text = "1.88"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "2.19"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "2.50"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "2.97"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "3.75"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "4.53"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "5.00"End IfEnd IfEnd IfIf txt_xh.Text = "E" ThenIf Val(Text8.Text) >= 1.354 And Val(Text8.Text) <= 1.51 Then 'E型号表第一行If Val(txt_n1.Text) = 200 ThenText18.Text = "0.96"ElseIf Val(txt_n1.Text) = 300 ThenText18.Text = "1.45"ElseIf Val(txt_n1.Text) = 400 ThenText18.Text = "1.93"ElseIf Val(txt_n1.Text) = 500 ThenText18.Text = "2.41"ElseIf Val(txt_n1.Text) = 600 ThenText18.Text = "2.89"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "3.38"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "3.86"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "4.58"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "5.61"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "6.83"Text18.Text = "-"End IfEnd IfIf Val(Text8.T ext) >= 2 Then 'E型号表第二行If Val(txt_n1.Text) = 200 ThenText18.Text = "1.24"ElseIf Val(txt_n1.Text) = 300 ThenText18.Text = "1.86"ElseIf Val(txt_n1.Text) = 400 ThenText18.Text = "2.48"ElseIf Val(txt_n1.Text) = 500 ThenText18.Text = "3.10"ElseIf Val(txt_n1.Text) = 600 ThenText18.Text = "3.72"ElseIf Val(txt_n1.Text) = 730 ThenText18.Text = "4.34"ElseIf Val(txt_n1.Text) = 800 ThenText18.Text = "4.96"ElseIf Val(txt_n1.Text) = 980 ThenText18.Text = "5.89"ElseIf Val(txt_n1.Text) = 1200 ThenText18.Text = "7.21"ElseIf Val(txt_n1.Text) = 1460 ThenText18.Text = "8.78"ElseIf Val(txt_n1.Text) = 1600 ThenText18.Text = "-"End IfEnd IfEnd IfEnd SubPrivate Sub Command24_Click()Picture10.Visible = FalsePicture12.Visible = TrueCommand36.Enabled = TrueEnd SubPrivate Sub Command26_Click() '确定长度系数KL If txt_xh.Text = "Z" ThenIf Val(txt_ld.Text) = 400 Then 'Z型号表Text19.Text = "+0.87"ElseIf Val(txt_ld.Text) = 450 ThenText19.Text = "+0.89"ElseIf Val(txt_ld.Text) = 500 ThenText19.Text = "+0.91"ElseIf Val(txt_ld.Text) = 630 ThenText19.Text = "+0.96"ElseIf Val(txt_ld.Text) = 710 ThenText19.Text = "+0.99"ElseIf Val(txt_ld.Text) = 800 ThenText19.Text = "+1.00"ElseIf Val(txt_ld.Text) = 900 ThenText19.Text = "+1.03"ElseIf Val(txt_ld.Text) = 1120 ThenText19.Text = "+1.08"ElseIf Val(txt_ld.Text) = 1250 ThenText19.Text = "+1.11"ElseIf Val(txt_ld.Text) = 1400 ThenText19.Text = "+1.14"ElseIf Val(txt_ld.Text) = 1600 ThenText19.Text = "+1.16"ElseIf Val(txt_ld.Text) = 1800 ThenText19.Text = "+1.18"End IfElseIf txt_xh.Text = "A" ThenIf Val(txt_ld.Text) = 630 Then 'A型号表Text19.Text = "+0.81"ElseIf Val(txt_ld.Text) = 710 ThenText19.Text = "+0.83"ElseIf Val(txt_ld.Text) = 800 ThenText19.Text = "+0.85"ElseIf Val(txt_ld.Text) = 900 ThenText19.Text = "+0.87"ElseIf Val(txt_ld.Text) = 1000 ThenText19.Text = "+0.89"ElseIf Val(txt_ld.Text) = 1120 ThenText19.Text = "+1.00"ElseIf Val(txt_ld.Text) = 1250 ThenText19.Text = "+0.93"ElseIf Val(txt_ld.Text) = 1400 ThenText19.Text = "+0.96"ElseIf Val(txt_ld.Text) = 1600 ThenText19.Text = "+0.99"ElseIf Val(txt_ld.Text) = 1800 ThenText19.Text = "+1.01"ElseIf Val(txt_ld.Text) = 2000 ThenText19.Text = "+1.03"ElseIf Val(txt_ld.Text) = 2240 ThenText19.Text = "+1.06"ElseIf Val(txt_ld.Text) = 2500 ThenText19.Text = "+1.09"ElseIf Val(txt_ld.Text) = 2800 ThenText19.Text = "+1.11"ElseIf Val(txt_ld.Text) = 3150 ThenText19.Text = "+1.13"ElseIf Val(txt_ld.Text) = 3650 ThenText19.Text = "+1.17"ElseIf Val(txt_ld.Text) = 4000 ThenText19.Text = "+1.19"End IfElseIf txt_xh.Text = "B" Then 'B型号表If Val(txt_ld.Text) = 900 ThenText19.Text = "+0.82"ElseIf Val(txt_ld.Text) = 1000 ThenText19.Text = "+0.84"ElseIf Val(txt_ld.Text) = 1120 ThenText19.Text = "+0.86"ElseIf Val(txt_ld.Text) = 1250 ThenText19.Text = "+0.88"ElseIf Val(txt_ld.Text) = 1400 ThenText19.Text = "+0.90"ElseIf Val(txt_ld.Text) = 1600 ThenText19.Text = "+0.92"ElseIf Val(txt_ld.Text) = 1800 ThenText19.Text = "+0.95"ElseIf Val(txt_ld.Text) = 2000 ThenText19.Text = "+0.98"ElseIf Val(txt_ld.Text) = 2240 ThenText19.Text = "+1.00"ElseIf Val(txt_ld.Text) = 2500 ThenText19.Text = "+1.03"ElseIf Val(txt_ld.Text) = 2800 ThenText19.Text = "+1.05"ElseIf Val(txt_ld.Text) = 3150 ThenText19.Text = "+1.07"ElseIf Val(txt_ld.Text) = 3650 ThenText19.Text = "+1.09"ElseIf Val(txt_ld.Text) = 4000 ThenText19.Text = "+1.13"ElseIf Val(txt_ld.Text) = 4500 ThenText19.Text = "+1.15"ElseIf Val(txt_ld.Text) = 5000 ThenText19.Text = "+1.18"End IfElseIf txt_xh.Text = "C" Then 'C型号表If Val(txt_ld.Text) = 1600 ThenText19.Text = "+0.83"ElseIf Val(txt_ld.Text) = 1800 ThenText19.Text = "+0.86"ElseIf Val(txt_ld.Text) = 2000 ThenText19.Text = "+0.88"ElseIf Val(txt_ld.Text) = 2240 ThenText19.Text = "+0.91"ElseIf Val(txt_ld.Text) = 2500 ThenText19.Text = "+0.93"ElseIf Val(txt_ld.Text) = 2800 ThenText19.Text = "+0.95"ElseIf Val(txt_ld.Text) = 3150 ThenText19.Text = "+0.97"ElseIf Val(txt_ld.Text) = 3650 ThenText19.Text = "+0.99"ElseIf Val(txt_ld.Text) = 4000 ThenText19.Text = "+1.02"ElseIf Val(txt_ld.Text) = 4500 ThenText19.Text = "+1.04"ElseIf Val(txt_ld.Text) = 5000 ThenText19.Text = "+1.07"ElseIf Val(txt_ld.Text) = 5600 ThenText19.Text = "+1.09"ElseIf Val(txt_ld.Text) = 6300 ThenText19.Text = "+1.12"ElseIf Val(txt_ld.Text) = 7100 ThenText19.Text = "+1.15"ElseIf Val(txt_ld.Text) = 8000 ThenText19.Text = "+1.18"ElseIf Val(txt_ld.Text) = 9000 ThenText19.Text = "+1.21"ElseIf Val(txt_ld.Text) = 10000 ThenText19.Text = "+1.23"End IfElseIf txt_xh.Text = "D" Then 'D型号表If Val(txt_ld.Text) = 2800 ThenText19.Text = "+0.83"ElseIf Val(txt_ld.Text) = 3150 ThenText19.Text = "+0.86"ElseIf Val(txt_ld.Text) = 3650 ThenText19.Text = "+0.89"ElseIf Val(txt_ld.Text) = 4000 ThenText19.Text = "+0.91"ElseIf Val(txt_ld.Text) = 4500 ThenText19.Text = "+0.93"ElseIf Val(txt_ld.Text) = 5000 ThenText19.Text = "+0.96"ElseIf Val(txt_ld.Text) = 5600 ThenText19.Text = "+0.98"ElseIf Val(txt_ld.Text) = 6300 ThenText19.Text = "+1.00"ElseIf Val(txt_ld.Text) = 7100 ThenText19.Text = "+1.03"ElseIf Val(txt_ld.Text) = 8000 ThenText19.Text = "+1.06"ElseIf Val(txt_ld.Text) = 9000 ThenText19.Text = "+1.08"ElseIf Val(txt_ld.Text) = 10000 ThenText19.Text = "+1.11"End IfElseIf txt_xh.Text = "E" Then 'E型号表If Val(txt_ld.Text) = 4500 ThenText19.Text = "+0.90"ElseIf Val(txt_ld.Text) = 5000 ThenText19.Text = "+0.92"ElseIf Val(txt_ld.Text) = 5600 ThenText19.Text = "+0.95"ElseIf Val(txt_ld.Text) = 6300 ThenText19.Text = "+0.97"ElseIf Val(txt_ld.Text) = 7100 ThenText19.Text = "+1.00"ElseIf Val(txt_ld.Text) = 8000 ThenText19.Text = "+1.02"ElseIf Val(txt_ld.Text) = 9000 ThenText19.Text = "+1.05"ElseIf Val(txt_ld.Text) = 10000 ThenText19.Text = "+1.07"End IfEnd IfEnd SubPrivate Sub Command27_Click()'计算V带根数txt_zcd.Text = CStr(Format(Val(txt_pc.Text) / ((Val(Text17.Text) + Val(Text18.Text)) * Val(Text16.Text) * Val(Text19.T ext)), "######.##"))End SubPrivate Sub Command28_Click()'对V带根数进行圆整txt_zyz.T ext = CStr(Int(Val(txt_zcd.Text)) + 1)End SubPrivate Sub Command29_Click()'载入课程说明中原始数据txt_p.Text = "7.5"txt_n1.Text = "1450"txt_n2.Text = "630"txt_ka.Text = "1.1"If Text8.Text = "" ThenText8.Text = CStr(Val(txt_n1.Text) / Val(txt_n2.Text))Elsetxt_n2.Text = CStr(Val(txt_n1.Text) / Val(Text8.Text))End IfEnd SubPrivate Sub Command3_Click()Picture2.Visible = TruePicture5.Visible = FalsePicture10.Visible = FalsePicture12.Visible = FalsePicture1.Visible = FalseFrame1.Visible = FalseFrame12.Visible = FalseFrame25.Visible = FalseEnd SubPrivate Sub Command30_Click()chaxun_ka.Visible = FalseEnd SubPrivate Sub Command31_Click()jizhunzhijing.Visible = FalseEnd SubPrivate Sub Command32_Click()'查询每米带质量q If txt_xh.Text = "Z" Thentxt_q.Text = "0.06"ElseIf txt_xh.Text = "A" Thentxt_q.Text = "0.10"ElseIf txt_xh.Text = "B" Thentxt_q.Text = "0.17"ElseIf txt_xh.Text = "C" Thentxt_q.Text = "0.30"ElseIf txt_xh.Text = "D" Thentxt_q.Text = "0.62"ElseIf txt_xh.Text = "E" Thentxt_q.Text = "0.90"End IfEnd SubPrivate Sub Command33_Click()'计算初拉力F0 txt_f0.Text = CStr(Format(500 * Val(txt_pc.Text) / (Val(txt_zyz.Text) * Val(txt_v.Text)) * (2.5 / Val(Text16.Text) - 1) + Val(txt_q.Text) * (Val(txt_v.Text)) ^ 2, "######.##"))End SubPrivate Sub Command34_Click()'计算压轴力Q Text1.Text = CStr(Format(2 * Val(txt_zyz.T ext) * Val(txt_f0.Text) * Sin(Val(txt_bj.Text) / (4 * 180) * 3.1415926), "######.##"))End SubPrivate Sub Command35_Click()'对实验所得数据进行汇总Picture12.Visible = FalseFrame25.Visible = TrueText5.Text = txt_xh.TextText6.Text = txt_d1.TextText7.Text = txt_d2.TextText9.Text = Text2.TextText10.Text = txt_ld.TextText11.Text = txt_a.T extText12.Text = txt_bj.T extText13.Text = txt_zyz.TextText14.Text = txt_f0.TextText15.Text = Text1.T extEnd SubPrivate Sub Command36_Click()Picture2.Visible = FalsePicture5.Visible = FalsePicture10.Visible = FalsePicture12.Visible = TruePicture1.Visible = FalseFrame1.Visible = FalseFrame12.Visible = FalseFrame25.Visible = FalseEnd SubPrivate Sub Command37_Click()'结束程序EndEnd SubPrivate Sub Command38_Click()Picture2.Visible = FalsePicture5.Visible = FalsePicture10.Visible = FalsePicture12.Visible = FalsePicture1.Visible = FalseFrame1.Visible = FalseFrame12.Visible = TrueEnd SubPrivate Sub Command4_Click()Picture2.Visible = FalsePicture5.Visible = TruePicture10.Visible = FalsePicture12.Visible = FalsePicture1.Visible = FalseFrame1.Visible = False。
装订线一.设计任务书
给定电动机型号、鼓风机轴转速和一天工作时间,要求设计合适的V带传动装置,完成电动机功率向鼓风机的传递。
主要设计计算内容有:确定带的型号、长度、根数,带轮直径,带传动中心距,作用在轴上的压力等;结构设计内容有:V带轮的材料、结构形式、基本尺寸等。
二.传动方案的拟定及说明
主动带轮1装在电动机轴上,从动带轮2装在鼓风机轴上,两带轮中心的水平距离a约等于大带轮直径d2的2倍。
线F d0=121 N。
带轮材料选择HT150,主动轮和从动轮都选取腹板式带轮。
七.参考资料
(1)《机械设计课程设计》(李兴华编,清华大学出版社)
(2)《机械设计》(第九版,高等教育出版社)
(3)《机械制图》(第六版,高等教育出版社)
(1)
(2)。
实用文档
机械设计课程设计
计算说明书
设计题目 V带传动设计
机械工程学院机械电子研究所专业机械电子学号
设计人邵谣夏
指导教师乐韵斐
完成日期 2016 年 4 月 6 日
目录
一、设计任务书 (2)
二、传动方案的拟定及说明 (3)
三、电动机的选择计算 (3)
四、计算传动装置的运动和动力参数 (3)
五、V带传动的设计计算 (3)
六、V带轮的结构设计 (5)
七、设计小结 (6)
八、参考文献 (6)
设计计算及说明主要结果
一、设计任务书
设计一由电动机驱动鼓风机的V带传动。
主动带轮1装在电动机轴上,从动带轮2装在
鼓风机轴上,两带轮中心的水平距离a约等于大带
轮直径的2倍。
1. V带传动机构简图
2.设计原始数据
电动机型号Y160M-4
鼓风机轴转速(r/min)600
一天工作时间/h 16
3.设计内容
1)确定带的型号、长度、根数
2)确定带轮直径
3)确定带传动中心距
4)确定作用在轴上的压力
4.设计任务
1)完成V带轮结构设计
2)主动带轮装配图一张(A4)
3)设计计算说明书一份
由于是鼓风机,每天工作16小时,查
°
编著。
#in clude<stdio.h>#in clude<math.h>#defi ne Pi 3.1415926main (){inti1,i2,i3,i4,i5,i6,i7, n1,YDJ,GZJ,time,GZH,TYPE,VMAX,dd1,dd2,a0,Ld,F0,Q,Z,B,a nwser2,a nwser 1,ALF111;floatP,i,Ki,KA,Pd,K1,K2,K3,Kb,dd222,a1,a2,Ld0,Ld01 ,L d02,KL,a,KALF,P0,DIFP0,V ,ALF1,DIFd20, DIFd21;float KA11[4][3]={{1.0,1.1,1.2},{1.1,1.2,1.3},{1.2,1.3,1.4},{1.3,1.4,1.5}};float KA22[4][3]={{1.1,1.2,1.3},{1.2,1.3,1.4},{1.4,1.5,1.6},{1.5,1.6,1.8}};float K11[6]={0.246,0.449,0.794,1.48,3.15,4.57};float K22[6]={7.44,19.02,50.6,143.2,77,7.06};float K33[6]={0.441,0.765,1.31,2.34,4.77,7.06};float Kbb[6]={0.2925,0.7725,1.9875,5.625,19.95,37.35};intdd11[ 6][4]={{50,63,71,80},{75,90,100,125},{120,140,160,180},{200,250,315,400},{355 ,400,450,500},{500,560,630,710}};int dd22[27]={50,63,71,80,90,100,112,125,140,150,160,180,200,224,250,280,315,355,400,425,450,500,560,600,630,710,800};intLdd[23]={400,450,500,560,630,710,800,900,1000,1120,1250,1400,1600,1800,2000,2240,2500,28 00,3150,3550,4000,4500,5000};float KLL[24][6]={{0.87,0,0,0,0,0},{0.89,0,0,0,0,0},{0.91,0,0,0,0,0},{0.94,0,0,0,0,0},{0.96,0.81,0,0,0,0},{0.99,0.83,0,0,0,0},{1.00,0.85,0.82,0,0,0},{1.03,0.87,0.84,0.83,0,0},{1.06,0.89,0.86,0.86,0.83,0},{1.08,0.91,0.88,0.88,0.86,0},{1.10,0.93,0.90,0.91,0.89,0},{1.14,0.96,0.92,0.93,0.91,0},{1.16,0.99,0.95,0.95,0.93,0},{1.18,1.01,0.98,0.97,0.96,0},{0,1.03,1.00,0.99,0.98,0},{0,1.06, 1.03,1.02,1.00,0},{0,1.09,1.05,1.04,1.03,0},{0,1.11,1.07,1.07,1.06,0},{0,1.13,1.09,1.09,1.08,0},{0,1.17,1.13,1.12,1.11,0},{0,1.19,1.15,1.15,1.14,0},{0,0,1.18,1.18,1.17,0},{0,0,0,1.21,1.22,0}};float m[6]={0.06,0.1,0.17,0.3,0.6,0.9};int ALF11[14]={220,210,200,190,180,170,160,150,140,130,120,110,100,90};float KALF1[14]={1.20,1.15,1.10,1.00,0.98,0.95,0.92,0.89,0.86,0.82,0.78,0.73,0.68};float f[6]={8,10,12.5,17,23,29};float e[ 6]={12,15,19,25.5,37,44.5};printf("请输入名义功率P,单位:kw : \n");scan f("%f",&P);printf(”请输入小带轮转速n 1,单位:r/min:\n");scan f("%d",&n 1);printf(”请输入传动比i\n");scan f("%f", & i);printf("请输入原动机的类型1•普通笼型交流电机,同步电动机,并激直流电动机;\n11. 交流电动机(双笼型,滑环型,单项,大转差率),直流电动机(复激,串激),单缸发动机:\n");scan f("%d",&YDJ);printf("载荷类型\n0:载荷平稳\n1:载荷变动小\n2:载荷变动大\n:3:载荷变动很大\n");scan f("%d",&GZJ);printf("请输入每天的工作时间:\n0:<10h\n1:10h~16h\n2:>16h\n");scan f("%d", &time);printf("请输入工作环境:\n0:室外、有尘\n1:室内、清洁\n");scan f("%d",&GZH);/*查表5.6求传动比系数Ki*/if(i>=1 &&i<=1.01)Ki=1.0000;else if(i>=1.02&&i<=1.04)Ki=1.0136;else if(i>=1.05&&i<=1.08)Ki=1.0276;else if(i>=1.09&&i <=1.12)Ki=1.0419;else if(i>=1.13&&i<=1.18)Ki=1.0567;else if(i>=1.19&&i <=1.24)Ki=1.0719;else if(i>=1.25&&i<=1.34)Ki=1.0875;else if(i>=1.35&&i <=1.51)Ki=1.1036;else if(i>=1.52&&i<=1.99)Ki=1.1202;else if(i>=2)Ki=1.1373; else/*查表5.7得工作系数KA*/if(YDJ==1){if(GZH==1)KA=KA11[GZJ][time]; elseKA=KA11[GZJ][time]*1.1; }else if(YDJ==11){if(GZH==1)KA=KA22[GZJ][time]; elseKA=KA22[GZJ][time]*1.1; }Pd=KA*P;/*输入带型号*/do{do{printf(”经计算设计功率为Pd=%f kw,输入的小带轮转速为n仁%d r/min,请以此查图5.17 选择带型:\n",Pd,n1);printf("0:Z 型V 带\n 1:A 型V 带\n2:B 型V 带\n3:C 型V 带\n4:D 型V 带\n5:E 型V 带\n"); sca nf("%d",& TYPE);/*根据带型确定最大带速*/if(TYPE==0||TYPE==1||TYPE==2||TYPE==3)VMAX=25;else if(TYPE==3||TYPE==4)VMAX=30;elseprintf("您输入的带型有误,请重新检查!\n");/*根据带型确定额定功率的K1,K2,K3*/K1=K11[TYPE];K2=K22[TYPE];K3=K33[TYPE]*0.0001;/*根据带型确定弯曲影响系数Kb*/Kb=Kbb[TYPE]*0.001;do{do{printf(”带轮的系列基准直径为\n");for(i 1=0;i1<=3;i1++){prin tf("%d mm\n",dd11[TYPE][i1]);}printf("请选择输入小带轮的基准直径:\n");scan f("%d", &dd1);V=(Pi*dd1* n1)/(60*1000);}while(V>VMAX);/*确定大轮直径*/dd222=i*dd1;for(i2=0;i2<=26;i2++){i7=i2+1;if(dd222>=dd22[i2]&&dd222<=dd22[i7]) {DIFd20=dd222-dd22[i2];DIFd21=dd22[i7]-dd222;if(DIFd20>=DIFd21) dd2=dd22[i7];else if(DIFd20<DIFd21) dd2=dd22[i2];}}printf(”经计算大轮基准直径为:%dmm\n",dd2);a1=0.7*(dd1+dd2);a2=2*(dd1+dd2);printf("经计算a仁%f,a2=%f,请输入初估中心距a0:\n",a1,a2); scan f("%d", &a0); Ld0=2*a0+Pi*(dd1+dd2)/2+(dd2-dd1)*(dd2-dd1)/(4*a0); prin tf("LdO=%f',LdO);/*基准长度Ld的确定*/for(i3=0;i3<=22;i3++){if(LdO>=Ldd[i3]&&LdO<=Ldd[i3+1]){Ld01=Ld0-Ldd[i3];LdO2=Ldd[i3+1]-LdO;if(Ld01>=Ld02)Ld=Ldd[i3+1];elseLd=Ldd[i3];}}prin tf("Ld=%d",Ld);/*基准长度系数KL的确定*/for(i4=0;i4<=22;i4++){if(Ld==Ldd[i4]){KL=KLL[i4][TYPE];}}printf(” 基准长度系数KL=%f\n",KL);/*计算实际中心距*/a=aO+(Ld-LdO)/2;printf(” 中心距%f\n",a);/*计算小轮包角*/ALF 仁Pi-(dd2-dd1)*57.3*Pi/(a*180);printf(” 小轮包角为ALF仁%f\n",ALF1);/*确定包角系数*/for(i5=0;i5<=13;i5++){i6=i5+1;ALF11 仁ALF1*180/Pi;if((ALF111<=ALF11[i5])&&(ALF111>=ALF11[i6])) {KALF=KALF1[i6]+(ALF111-ALF11[i6])*(KALF1[i5]-KALF1[i6])/10;}printf("包角系数为KALF=%f\n",KALF);/* 计算P0 和DIFPO*/P0=(K1*pow(V ,-0.09)-K2/dd1-K3*V*V)*V;DIFPO=Kb* n1*(1-1/Ki);/*pri ntf("PO=%f\n",PO);prin tf("DIFP0=%f\n",DIFP0)*/;/*确定V带根数*/Z=Pd/((PO+DIFPO)*KALF*KL);printf("V 带根数为Z=%d\n",Z);}while(Z>=10);F0=500*Pd*((2.5-KALF)/KALF)/(Z*V)+m[TYPE]*V*V;Q=2*Z*F0*si n(ALF1/2);B=(Z-1)*e[TYPE]+2*f[TYPE];B=%dmm.\n",FO,Q,B); printf(”初拉力FO=%dN,轴上的压力Q=%dN,轮缘宽度为printf(”是否计算下一种带轮直径: 1.是 2.否\n");sca nf("%d",&an wser1);}while(a nwser1==1);printf(”是否计算下一种带型:1.是 2.否\n");sca nf("%d",&an wser2);}while(a nwser2==1);}。
V带传动计算说明书机械设计课程设计计算说明书设计题目 V带传动设计机械工程学院机械电子研究所专业机械电子学号设计人邵谣夏指导教师乐韵斐完成日期 2016 年 4 月 6 日目录一、设计任务书 (3)二、传动方案的拟定及说明 (4)三、电动机的选择计算 (4)四、计算传动装置的运动和动力参数 (4)五、V带传动的设计计算 (5)六、V带轮的结构设计 (7)七、设计小结 (8)八、参考文献 (9)设计计算及说明主要结果一、设计任务书设计一由电动机驱动鼓风机的V带传动。
主动带轮1装在电动机轴上,从动带轮2装在鼓风机轴上,两带轮中心的水平距离a约等于大带轮直径的2倍。
1. V带传动机构简图2.设计原始数据电动机型号Y160M-4鼓风机轴转速(r/min)600一天工作时间/h 163.设计内容1)确定带的型号、长度、根数2)确定带轮直径3)确定带传动中心距4)确定作用在轴上的压力4.设计任务1)完成V带轮结构设计2)主动带轮装配图一张(A4)3)设计计算说明书一份二、传动方案的拟定及说明如传动机构简图所示,传动方案采用V带传动。
可以产生较大的传动摩擦力,结构简单、传动平稳,造价低。
采用V带传动可以缓冲减振,同时起到过载保护的作用。
三、电动机的选择计算如题目要求,选用Y160M-4型电动机。
1.电动机的额定功率=11kW2.电动机的满载转速=1460r/min。
鼓风机轴转速=600r/min,推荐传动比i=2~5,则电动机转速可选范围=1200~3000r/min所选电动机同步转速=1500r/min,符合要求。
四、计算传动装置的运动和动力参数1.各轴转速电动机轴为1轴,鼓风机轴为2轴。
2.各轴输入功率3.各轴转矩=11kW五、V带传动的设计计算1.确定计算功率由于是鼓风机,每天工作16小时,查《机械设计》(后文略去书名)表8-8得,工作情况系数2.确定V带带型由图8-11,选择B型3.确定带轮直径并验算带速1)初选小带轮直径由表8-7、8-9选=160mm2)验算带速在5~25m/s之间,符合设计要求。
新鄉学院CAD/CAM作业二题目:VB编程的V带传动设计姓名学号12042010101所在学院名称机电工程学院专业名称机械设计制造及其自动化指导教师姓名2013年10月目录内容摘要 (2)关键词 (2)Abstract (2)Keywords (3)1.绪论 (3)1.1用VB编程设计带传动 (3)1.2带传动简介 (3)2.V带传动设计 (4)2.1已知条件和设计内容 (4)2.2设计步骤和方法 (4)3.用VB编程的方法设计V带传动 (6)3.1编程的前期准备 (6)3.2 VB编程的程序 (7)参考文献 (20)致谢 (21)内容摘要:在随着科学技术的发展,机械制造业的应用十分广泛,特别是在农业机械、工程机械、军事应用当中占据着重要位置。
一些常用的机械设备,一般都是要依靠机械传动提供所需要的动力,而在机械传动中V带传动式最传统也是应用最为广泛的机械传动。
因此,掌握V带传动的设计是十分重要和必要的。
本篇文章应用传统的机械设计方法,通过VB软件强大的功能,使得普通V带的参数化得以实现,与传统的设计方法相比,极大地提高工作效率,缩短了大量的工作时间。
此外,VB上手比较容易,且能建立友好的界面,其功能比较实用,便于理解面向对象编程,这也是此次设计选取VB的原因。
总的来看,本次设计包含了数学模型的建立和程序的编制。
当设计的系统完成时,我们可以得到一个可视化的操作界面,此界面可以输入一些用户给定的原始条件,然后程序自动进行设计校核计算,并得到相应的结果。
关键词: V带传动机械设计数学模型Abstract :With the development of science and technology, a nd machinery manufacturing applications is very extensive, esp ecially in the agricultural machinery, engineering machinery, military applications, which occupies an important position. C ommonly used in machinery and equipment, are generally rely on mechanical transmission provide the required power, whilein the mechanical transmission V-belt transmission type most traditional is the most widely used mechanical transmission. Therefore, grasp the V-belt drive design is very important a nd necessary. This article the application of traditional mec hanical design, through the powerful features of the VB soft ware, making the ordinary V-belt parameters system to be ach ieved, compared with the traditional design methods, and grea tly improve work efficiency, and reduces the amount of worki ng time. In addition, the vb to get started is relatively easy and friendly interface, its function is more practical, easy to understand object-oriented programming, and this is the design select the VB reasons. Overall, the design incl udes the establishment of the mathematical model and procedur es for the preparation of. Completion of the design of the system, we can get a visual user interface, this interface can enter some user given initial conditions, then the pro gram automatically design checking calculation, and the corres ponding results.Keywords:V belt drive mechanical design mathematical model1.绪论1.1用VB编程设计带传动带传动用于传递动力和功率,在机械传动中扮演者重要的角色,已得到越来越广泛的应用并在我们日常生活中起到重要的作用。
#include<iostream.h>#include <math.h>#include <stdio.h>#include<iomanip>#include<fstream>using namespace std;#define pi 3.1415926int x,y,i,j,a,z,e,t;//z为v带的条数m,n,double c1,c2,a0,a1,lc,lj,l,b,amin,amax;int n1,n2;//n1为小带轮的速度,n2为大带轮的速度int lh;//lh为电动机工作时间double k,v,u,ka,al,kl;//k为工作情况系数,v为V带的速度,u为传动比,ka为包角系数,al为包角double p,pc,p1,p0;//p为电动机的功率,pc为计算功率,p1为单根普通V带所能传递的功率,p0为单根普通V带传动功率的增量double d1,d2;//d1,d2分别为大小带轮的直径int g;//g表示工作机的工作状况:g=1,2,3,4分别表示稳,变动小,变动大,变动很大double cc[5];//数组cc里的各元素依次表示Z,A,B,C,D,E型电动机边界线的C值double f0,q;//f0为V带的张紧力,q为V带作用在轴上的压轴力int s;//s=1表示为第一类原动机,s=2表示为第二类原动机static double aa[6][17]={{0,0.00039,0.06,0.246,7.44,4.41e-5,0.72,0.00043,9.8e-08,435,50,63,71,80,90,1,13},{0,0.00103,0.1,0.449,19.62,7.65e-5,0.68,0.000225,2.25e-08,100,75,90,100,112,125,5,18}, {0,0.00265,0.17,0.794,50.6,1.31e-4,0.68,0.000174,1.94e-08,27,125,140,150,170,180,8,24}, {0,0.0075,0.3,1.48,143.2,2.43e-4,0.70,0.00964,4.48e-7,7.2,200,224,236,265,280,14,29}, {0,0.0266,0.62,3.15,507.3,4.77e-4,0.78,3.38e-5,0,0.92,355,400,425,475,500,18,32},{0,0.0498,0.9,4.57,951.5,7.06e-4,0.706,4.95e-5,1.254e-9,0,500,560,630,800,900,22,33}}; static char bb[6]={'Z','A','B','C','D','E'};static int ll[34]={0,400,450,500,560,630,710,800,900,1000,1120,1250,1400,1600,1800,2000,2240,2500,2800,3150,3550,4000,4500,5000,5600,6300,7100,8000,9000,10000,11200,12500,14000,16000};//*********P1,P2为功率增量矩阵********double P1[6][11]={{0.01,0.01,0.01,0.02,0.02,0.02,0.02,0.03,0.03,0.04,0.04},{0.01,0.02,0.02,0.02,0.03,0.03,0.03,0.04,0.04,0.04,0.05},{0.04,0.07,0.08,0.08,0.11,0.13,0.15,0.19,0.23,0.26,0.30},{0.05,0.09,0.10,0.11,0.15,0.17,0.19,0.24,0.29,0.34,0.39},{0.10,0.17,0.20,0.23,0.30,0.36,0.39,0.49,0.59,0.69,0.79},{0.13,0.22,0.25,0.30,0.38,0.46,0.51,0.63,0.76,0.89,1.01}};double P2[6][11]={{0.14,0.21,0.27,0.34,0.41,0.48,0.55,0.65,0.82,0.99,1.10},{0.18,0.26,0.35,0.44,0.53,0.62,0.71,0.83,1.06,1.27,1.41},{0.49,0.73,0.97,1.22,1.46,1.70,1.95,2.31,2.92,3.52,3.89},{0.63,0.94,1.25,1.56,1.88,2.19,2.50,2.97,3.75,4.53,5.00},{0.96,1.45,1.93,2.41,2.89,3.38,3.86,4.58,5.61,6.83},{1.24,1.86,2.48,3.10,3.72,4.34,4.96,5.89,7.21,8.78}};void gkxs(){if(s==1){ if(lh>=16) k=1.2;else if(lh<=16&&lh>=10) k=1.1;else k=1.0;switch(g){case 1:k=k;break;case 2:k=k+0.1;break;case 3:k=k+0.2;break;case 4:k=k+0.3;break;default:;}}else if(s==2){if(lh>=16) k=1.3;else if(lh<=16&&lh>=10) k=1.2;else k=1.1;switch(g){case 1:k=k;break;case 2:k=k+0.1;break;case 3:k=k+0.3;break;case 4:{if(lh>=16)k=k+0.5;else k=k+0.4;};break;default:;}}}void glzl(int n01,int n02,int n03,int n04,int n05,int n06,int n07,int n08,int n09,int n010,int n011) {int n11,n12,n13,n14,n15,n16,n17,n18,n19,n110,n111;n11=n01;n12=n02;n13=n03;n14=n04;n15=n05;n16=n06;n17=n07;n18=n08;n19=n09;n111=n011;if(n1==n11){t=0;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5; }if(n1==n12){t=1;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5; };if(n1==n13){t=2;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5; };if(n1==n14){t=3;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5; };if(n1==n15){t=4;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5; };if(n1==n16){t=5;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5; };{t=6;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5;};if(n1==n18){t=7;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5;};if(n1==n19){ t=8;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5;};if(n1==n110){t=9;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5;};if(n1==n111){t=10;if(bb[i]=='Z'||bb[i]=='C') e=(u>=1.35&&u<=1.51)?0:1;else if(bb[i]=='A'||bb[i]=='D') e=(u>=1.35&&u<=1.51)?2:3;else if(bb[i]=='B'||bb[i]=='E') e=(u>=1.35&&u<=1.51)?4:5;};}double bjxs(){int af[12]={70,80,90,100,110,120,130,140,150,160,170,180};double KA[12]={0.58,0.64,0.69,0.74,0.78,0.82,0.86,0.89,0.92,0.95,0.98,1.00};int n=0;if (al<70) ka=0.58;else if (al>=180) ka=1.00;elsefor (n=1;n<=11;n++){if (al<=af[n]) n=n-1;ka=(al-af[n])*(KA[n+1]-KA[n])/(af[n+1]-af[n])+KA[n];break;}//ka=(double)(al-af[n+1])/(af[n]-af[n+1])*KA[n]+(double)(al-af[n])/(af[n+1]-af[n])*KA[n+1];return ka;}void main(){ printf("请输入已知数据:功率p(Kw),小轮转速n1(r/min),传动比u(若已知n2,则u=0),大轮转速n2(r/min):\n");cin>>p>>n1>>u>>n2;cout<<"功率为:p="<<p<<"kw"<<",小轮转速为:n1="<<n1<<"r/min"<<",大轮转速为:n2="<<n2<<"r/min"<<endl;cout<<"请输入已知系数:工作系数g,工作机系数s:"<<endl;cin>>s>>g;gkxs();pc=k*p;cout<<"工作情况为:";if(g=0) cout<<"平稳";else if(g=1) cout<<"变动小\n";else if(g=2) cout<<"变动大\n";else if(g=3) cout<<"变动很大\n";if(s=1)cout<<"工作机为:"<<"I类工作机\n";else if(s=2)cout<<"工作机为:"<<"为II类工作机\n";cout<<"请输入已知数据:工作班制系数lh,lh<=10为单班制,lh>10&&lh<=16为两班制,lh>16为三班制"<<endl;cin>>lh;cout<<"工作班制为:";if(lh<=10) cout<<"单班制"<<endl;else if(lh>10&&lh<=16) cout<<"两班制"<<endl;else if(lh>16) cout<<"三班制"<<endl;cout<<"请输入已知数据:给定中心距a(mm)(若未给定,则a=0),中心距系数a0(0.7~2,若已知a,则a0=0)"<<endl;cin>>a>>a0;cout<<"给定初始中心距为:"<<a<<endl;if(n2!=0) u=floor((double)n1/n2*1000+0.5)/1000;ofstream outfile("V带传动设计.xls",ios::out);//输出.xls格式的文件if(!outfile){cerr<<"open error!"<<endl;exit(1);}outfile<<"V带传动设计结果"<<endl;outfile<<"V带型号"<<"\t"<<"带长ld"<<"\t"<<"根数z"<<"\t"<<"小轮直径d1"<<"\t"<<"大轮直径d2"<<"\t"<<"带速v"<<"\t"<<"传动比u"<<"\t"<<"中心距a1"<<"\t"<<"最小中心距amin"<<"\t"<<"最大中心距amax"<<"\t"<<"初拉力f0"<<"\t"<<"压轴力q"<<endl;cc[0]=log10(365)+(log10(2510)-log10(365))*(log10(pc)-log10(0.8))/(log10(5)-log10(0.8));cc[1]=log10(100)+(log10(1500)-log10(100))*(log10(pc)-log10(1))/(log10(10)-log10(1));cc[2]=log10(100)+(log10(870)-log10(100))*(log10(pc)-log10(3.15))/(log10(18)-log10(3.15));cc[3]=log10(100)+(log10(700)-log10(100))*(log10(pc)-log10(9))/(log10(40)-log10(9));cc[4]=log10(100)+(log10(500)-log10(100))*(log10(pc)-log10(50))/(log10(200)-log10(50));for(i=0;i<=4;i++){if(n1>=pow(10,cc[i])) break;}if(i==0) {x=0;y=1;} //插值法else if(n1<=pow(10,cc[4])) {x=4;y=5;}else {x=i-1;y=i+1;}for(i=x;i<=y;i++)for(j=10;j<=14;j++){v=floor(pi*aa[i][j]*n1/600+0.5)/100;if(v>=5 && v<=20)//速度限制{d2=floor(u*aa[i][j]*0.98/5+0.5)*5;u=floor(d2/aa[i][j]/0.98*100+0.5)/100;c1=d2+aa[i][j];c2=d2-aa[i][j];if(a==0) a1=a0*c1;else a1=a;lc=2*a1+pi*c1/2+c2*c2/4/a1;for(int m=int(aa[i][15]);m<=int(aa[i][16]);m++){if(lc<=ll[m]) break;}lj=(ll[m]+ll[m-1])/2;if(lc<lj) l=ll[m-1];else l=ll[m];b=2*l-pi*c1;a1=floor((b+pow(b*b-8*c2*c2,0.5))/8*10+0.5)/10;amin=floor(a1-0.015*l+0.5);amax=floor(a1+0.03*l+0.5);al=180-c2/a1*57.3;if(al>=120){ ka=bjxs();kl=aa[i][6]+aa[i][7]*l-aa[i][8]*l*l;p0=(aa[i][3]*pow(v,-0.09)-aa[i][4]/aa[i][j]-aa[i][5]*v*v)*v;if(bb[i]=='Z'||bb[i]=='A'||bb[i]=='B'){glzl(400,730,800,980,1200,1460,1600,2000,2400,2800,3200);p1=P1[e][t];}else if(bb[i]=='C'||bb[i]=='D'||bb[i]=='E'){glzl(200,300,400,500,600,730,800,980,1200,1460,1600);p1=P2[e][t];}z=int(floor(pc/((p0+p1)*kl*ka)+0.95));if(z<=9){f0=floor((500*pc*(2.5/ka-1))/v/z+aa[i][2]*v*v+0.5);q=floor(2*z*f0*sin(al*pi/180/2)+0.5);cout<<"设计结果为:"<<endl;cout<<"工作情况系数为:k="<<k<<endl;cout<<"计算功率为:pc="<<pc<<endl;cout<<"V带型号为:"<<bb[i]<<"型"<<endl;cout<<"V带根数为:z="<<z<<endl;cout<<"V带长度为:ld="<<l<<endl;cout<<"小轮直径为:d1="<<aa[i][j]<<endl;cout<<"小轮直径为:d2="<<d2<<endl;cout<<"带速为:v="<<v<<endl;cout<<"传动比为:u="<<u<<endl;cout<<"中心距为:a1="<<a1<<endl;cout<<"最小中心距为:a="<<amin<<endl;cout<<"最大中心距为:a="<<amax<<endl;cout<<"初拉力为:f0="<<f0<<endl;cout<<"压轴力为:q="<<q<<endl;printf("***********pass!***************\n");outfile<<bb[i]<<"型"<<"\t"<<l<<"\t"<<z<<"\t"<<d1<<"\t"<<d2<<"\t"<<v<<"\t"<<u<<"\t"<<a1<<"\t"<<amin<<"\t"<<a max<<"\t"<<f0<<"\t"<<q<<endl;}}}if(v>=20) break;}cout<<"具体看里面的excel文件!"<<endl;}。

V带传动设计说明书V带传动设计说明书专业:化学⼯程与⼯艺设计者:张保贵1066115327王煜炎1066115406王贵发1066115337楼凯1066115338马艳芳1066155141 设计时间: 2012-11-3⽬录V带传动设计.............................................................................................. - 3 -⼀、带传动得设计准则 ............................................................................ - 3 -⼆、V带传动的设计内容......................................................................... - 3 -三、普通V带设计的⼀般步骤: ........................................................... - 3 -四、带传动设计计算 ................................................................................ - 3 -1.已知条件和设计内容 ....................................................................... - 3 -2.设计步骤和⽅法 ............................................................................... - 3 -2.1确定设计功率 .......................................................................... - 3 -2.2选择v带的带带型 .................................................................. - 5 -2.3 确定带轮直径及验算带速 ................................................ - 6 -2.4 计算中⼼距a及其变动范围。
普通V带传动设计说明书目录一、设计内容 (2)二、V带传动总体设计 (2)三、各带轮的设计及结果 (4)1、结构尺寸设计 (4)2、材料的选择,结构形式设计 (4)3、3D软件设计零件 (5)四、轴的设计 (6)五、机架的设计 (7)六、零件的装配 (8)七、设计小结 (9)八、参考资料 (10)一、设计内容。
1.已知条件:电机功率P=3Kw,小带轮转速n1=960 r/min, 传动比i=3.0,传动比允许误差≤5%±轻度冲击;两班工作制。
2.设计内容和要求。
1)V带传动的设计计算。
2)轴径设计。
取45号刚时,按下式估算:min 1.03d≥,并圆整;3)V带轮的结构设计。
选择带轮的材料、结构形式、计算基本结构尺寸;4)用3D软件设计零件及装配图,并标注主要的特征尺寸。
二、V带传动总体设计1. 确定计算功率ca P。
由表8-7查得工作情况系数A K=1.2,故Pca=A K*p=3.6kw2. 选择V带的带型。
根据ca P、n1由图8-10选用A型。
3. 确定带轮的基准直径d d,并验算带速v 。
1) 初选小带轮的基准直径1d d 。
由表8-6和表8-8,取小带轮的基准直径1d d =100mm 。
2) 验算带速v 。
按式(8-13)验算带的速度。
5.03m/s因为5/30/m s v m s <<,故带速合适。
3) 计算大带轮的基准直径.根据式(8-15a ),计算大带轮的基准直径2d d 。
d d2=i d d1=300mm ,由表8-8圆整d d2=315mm4. 确定V 带的中心距a 和基准长度d L 。
1)根据式(8-20),初定中心距 a 0=500mm 。
2)由式(8-22)计算带所需的基准长度。
11220020()2()24d d d d d d d L a d d a π-≈+++=1674.66mm 由表8-2选带的基准长度d L =1600mm 3)按式(8-23)计算实际中心距a 。
V带传动设计说明书专业:化学工程与工艺设计者:张保贵1066115327王煜炎1066115406王贵发1066115337楼凯1066115338马艳芳1066155141设计时间: 2012-11-3目录V带传动设计............................................................................. - 4 -一、带传动得设计准则 .................................................................... - 4 -二、V带传动的设计内容................................................................... - 4 -三、普通V带设计的一般步骤:............................................................. - 4 -四、带传动设计计算 ...................................................................... - 4 -1.已知条件和设计内容................................................................. - 4 -2.设计步骤和方法..................................................................... - 4 -2.1确定设计功率 ................................................................. - 4 -2.2选择v带的带带型 ............................................................. - 6 -2.3 确定带轮直径及验算带速..................................................... - 7 -2.4 计算中心距a及其变动范围。
V带二级传动二级减速器目录设计任务书 (2)第一部分传动装置总体设计 (4)第二部分 V带设计 (6)第三部分各齿轮的设计计算 (9)第四部分轴的设计 (13)第五部分校核 (19)第六部分主要尺寸及数据 (21)设计任务书一、课程设计题目:设计带式运输机传动装置(简图如下)原始数据:数据编号 3 5 7 10690 630 760 620 运输机工作转矩T/(N.m)0.8 0.9 0.75 0.9运输机带速V/(m/s)卷筒直径D/mm 320 380 320 360工作条件:连续单向运转,工作时有轻微振动,使用期限为10年,小批量生产,单班制工作(8小时/天)。
运输速度允许误差为%。
5二、课程设计内容1)传动装置的总体设计。
2)传动件及支承的设计计算。
3)减速器装配图及零件工作图。
4)设计计算说明书编写。
每个学生应完成:1)部件装配图一张(A1)。
2)零件工作图两张(A3)3)设计说明书一份(6000~8000字)。
本组设计数据:第三组数据:运输机工作轴转矩T/(N.m) 900 。
运输机带速V/(m/s) 1.7 。
卷筒直径D/mm 300 。
已给方案:外传动机构为V带传动。
减速器为两级展开式圆柱齿轮减速器。
第一部分 传动装置总体设计一、 传动方案(已给定) 1) 外传动为V 带传动。
2) 减速器为两级展开式圆柱齿轮减速器。
3) 方案简图如下: 二、该方案的优缺点:该工作机有轻微振动,由于V 带有缓冲吸振能力,采用V 带传动能减小振动带来的影响,并且该工作机属于小功率、载荷变化不大,可以采用V 带这种简单的结构,并且价格便宜,标准化程度高,大幅降低了成本。
减速器部分两级展开式圆柱齿轮减速,这是两级减速器中应用最广泛的一种。
齿轮相对于轴承不对称,要求轴具有较大的刚度。
高速级齿轮常布置在远离扭矩输入端的一边,以减小因弯曲变形所引起的载荷沿齿宽分布不均现象。
原动机部分为Y 系列三相交流异步电动机。
机械设计课程设计说明书(机械设计基础)设计题目驱动离心鼓风机的V带传动汽车学院(系)车辆工程专业班级学号设计人指导老师李新华完成日期2011年3月29日同济大学目录1、题目 (3)1.1方案图 (3)1.2原始数据 (3)2、选择电动机 (3)3、确定设计功率 (3)4、选择带的型号 (3)5、确定带的基准直径d d并验算带速v (3)5.1初选小带轮的基准直径d d1 (3)5.2验算带速v (4)5.3计算大带轮的基准直径d d2 (4)6、确定中心距a和v带基准长度 (4)6.1选取中心距 (4)6.2确定基准长度 (4)6.3计算实际中心距 (4)7、计算小轮包角 (4)8、确定v带根数Z (4)8.1计算单根V带的额定功率 (4)8.2计算V带根数 (4)9、计算单根V带的初拉力的最小值(F0)min (5)10、计算作用在轴上的压力F p (5)11、带轮结构设计 (5)11.1带轮材料选择 (5)11.2带轮结构形式 (5)11.3带轮结构尺寸 (5)11.4键槽尺寸及图 (6)13、设计小结 (7)14、参考文献 (7)题目:设计驱动离心鼓风机的V带传动要求:主动带轮1装在电动机轴上,从动轮2装在鼓风机轴上,两带轮中心的水平距离等于大带轮直径的2倍。
带式鼓风机的传动方案见下图:一、选择电动机由原始数据要求,查参考文献[2]表20-1得,Y系列三相异步电动机技术数据可选择:Y132M-4。
可查得:额定功率为7.5kw,满载转速为1440r/min,D为38mm,E为80mm,F为10mm.GD为8mm,G为33mm。
二、确定设计功率Pd设计功率是根据需要传递的名义功率及考虑载荷性质、原动机类型和每天连续工作的时间长短等因素共同确定的,表达式如下:Pca=K A×P式中P——需要传递的名义功率,KW;K A——工作情况系数,按教材表8-7,查得工作情况系数K A,选取K A=1.1。
设计任务:设计带式运输机中的V带传动带式运输机的传动方案见下图,机器工作平稳、单向回转、成批生产。
原始数据如下:一、确定设计功率查参考文献[1]表5.7得工作情况系数K A=1.2,则P d=K A P=1.2×2.2kW=2.64kW。
二、选择带的型号V带型号根据设计功率P d和小带轮转速n1确定,查参考文献【1】图5.17可选取A型带。
三、确定带轮的基准直径和查参考文献【1】表5.4 V带带轮最小基准直径,知A型带=75mm,选取小带轮基准直径:=100mm;因此,大带轮基准直径:==2.1×100mm=210mm。
查参考文献【1】表5.4选取大带轮基准直径=200mm。
其传动比误差为4.7%<5%,,故可用。
四、验算带的速度由带的速度公式:式中n1为电动机转速;d d1为小带轮基准直径。
v=25m/s,符合要求。
即v=4.92m/s<max五、确定中心距a 和V 带基准长度L d根据0.7(d d1+d d2)≦a 0≦2(d d1+d d2)初步确定中心距 0.7(100+200)=210mm ≤ a 0≤2(100+200)=600mm 要求工作平稳,选取中心距a 0=300mm 。
初算带的基准长度L d :式中 L d 为带的标准基准长度;L d ’为带的初算基准长度;a 0为初选中心距。
查教材表5.2普通带基准长度L d 及长度系数K L ,确定带的基准长度L d =1120mm 。
计算实际中心距a ,由六、计算小轮包角小带轮包角:七、确定V 带根数Z根据确定带的根数。
式中 为包角修正系数,考虑包角180α≠︒对传动能力的影响,由参考文献【1】表5.9查得; 为带长修正系数,考虑带长不为特定带长时对使用寿命的影响,由参考文献【1】表5.2查得; 为V 带基本额定功率。
由教材表5.4查取单根V 带所能传递的功率为=0.95kW ; 由式计算功率增量。