最新城市轨道交通基础地理信息系统的设计图
- 格式:doc
- 大小:91.50 KB
- 文档页数:7

一轨道交通线路模型1.轨道交通线路的分类1.1.按线路与地面的关系分类按线路与地面的关系分为地下线、地面线、高架线。
地下线一般选择在城市中心繁华地区,是对城市环境影响最小的一种线路敷设方式。
地面线是造价最低的一种敷设方式,一般敷设在有条件的城市道路或郊区。
高架线介于地面和地下之间的一种线路,既保持了专用道的形式,占地较少,又对城市交通干扰较小。
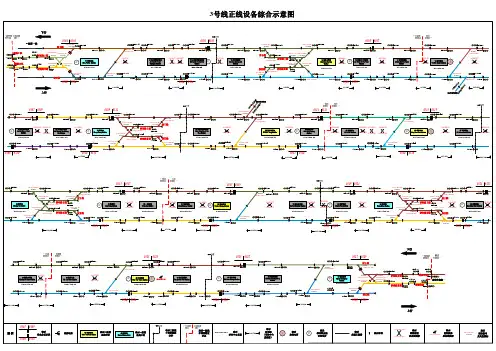
1.2.按线路在运营中的作用分类正线、辅助线、车场线(1).正线正线是指供载客列车运行的线路,贯穿所有车站和区间。
城市轨道交通正线是独立运行的线路,一般按双线设计,采用右侧行车制。
大多数线路为全封闭,与其他交通线路相交处,一般采用立体交叉。
图1-1 正线(2).辅助线辅助线是指为空载列车进行折返、停放、检查、转线及出入段作业所运行的线路,包括折返线、渡线、停车线、车辆段出入线和联络线等。
1) 折返线全线客流分布不均匀时,可组织区段运行,即在尽端站与中间站或中间站与中间站之间进行列车折返调头,在这些地方需要为列车设置折返线。
图1-2 折返线2)、渡线渡线是指在上下行正线之间(或其他平行线路之间)设置的连接线,通过一组联动道岔达到转线的目的。
渡线有单渡线和交叉渡线之分。
图1-3渡线3)、停车线停车线一般设置在端点站,专门用于停车,也可进行少量检修作业。
图1-4停车线4)、车辆段出入线车辆段,在轨道交通沿线适当的位置设置,保证运行列车的停放和检修。
车辆段与正线连接的线路为车辆段出入线。
图1-5 车辆段出入线5)、联络线在整个城市轨道交通网络中,要使同种制式线路可以实现列车过轨运行,这种过渡一般需要通过线与线之间的联络线来实现。
图1-6联络线1.3.车场线车场线是指在车辆基地内的各种作业线包括检修线、试验线、洗车线、出入库线.选线包括选择设计线路的走向、路由、车站分布、辅助线分布、交叉形式和铺设方式等。
选线分为经济选线和技术选线。
2. 车站是轨道交通线路车站是轨道交通线路是电气设备、信号设备、控制设备等集中的场所,也是运营、管理人员工作的场所。
关于地理信息在城市交通中的应用【摘要】地理信息系统是近几年来信息技术迅速发展的热点之一,如何将地理信息系统与城市规划结合起来开发实用的应用软件是值得研究的问题。
首先介绍了地理信息系统的发展和基本概念,然后站在城市交通整体全局的高度,为重庆市城市交通共用信息平台的建设提供一个蓝图,具有一定的指导意义。
【关键词】地理信息系统城市交通地理数据1 引言随着重庆市轨道交通不断发展,已经扩展为城市轨道交通网络,因此在勘测设计、综合协调指挥和快速处理应急事件方面提出了更高的要求。
由于地理信息系统(gis)在数据输入、存贮、检索、显示和综合分析等方面具有很大的优势,能够为重庆市制定最快速、准确的现代化路网更新方案。
此外,地理信息系统的三维可视化功能可以实现城市路网交通基础数据管理的可视化,使路网交通建设管理信息从简单的文字、表格形式向图形或三维模拟,甚至是信息的时空四维动态表达发展。
2 地理信息系统2.1 地理信息系统的定义地理信息系统(gis,geographical information system)是一种特定而又十分重要的空间信息系统,它是以采集、贮存、管理、分析和描述整个或部分地球表面地理分布有关的数据的空间信息系统。
从学科角度定义,gis(geographical information system,地理信息系统)是集图形管理与数据管理于一身,将计算机科学、地理科学、测绘学、遥感学、环境科学、空间科学、信息科学、管理科学等集为一体的新兴边缘学科。
同时它将空间数据处理、属性数据处理、空间分析与模型分析与计算机技术紧密结合,通过数据准备、系统建立、空间分析与模型分析,产生对资源环境管理、区域规划、管理决策、灾难防控、交通网络化管理等实用的信息。
2.2 地理信息系统组成及特征地理信息系统由计算机硬件系统、计算机软件系统、地理数据和系统管理人员组成,硬件配置是构成地理信息系统的基础部分,计算机系统是其核心装备,只要连接必要的输入输出设备,同时配备有数字化仪、扫描仪、绘图机、图像处理终端、磁带机等仪器。
城市轨道交通基础地理信息系统的设计图发布时间:2008-2-14 作者:花向红,王新洲,柳响林,周庆俊,田玉刚,王永弟摘要:介绍了武汉市轨道交通一号线工程概况,详细阐述了一号线二期工程测量基准建立的技术路线和实施的一些关键技术,分析了二期工程坐标基准建立所达到的精度,并对一期工程铺轨前复测成果进行了分析和评价,提出了一些建议和结论。
关键词:测量基准;技术路线;精度评价;复测分析1 前言武汉市轨道交通一号线工程东西方向横穿汉口,全长29.6km。
沿线设26座车站,一个车辆段和两个停车场(位于口和堤角),其中堤角停车场为预留车场,主要为六号线服务。
该工程分两期建设,一期工程为宗关至黄埔路[1],已于2000年底开始施工建设,二期工程从一期工程正线向两端延伸,分为东段线路和西段线路两个部分。
西段线路从一期工程宗关站西端正线顺延,沿解放大道中间布设,长11.50km。
东段线路从一期工程黄埔路站东段正线顺延,线路长7.14km。
二期工程设古田车辆段及综合维修基地。
设1座110kV主变电所。
2 测量基准建立的技术路线与实施2.1 平面基准根据轨道交通一号线二期工程现场踏勘情况,西段线路和东段线路分别在一期工程两端,并考虑到一期工程即将进入铺轨阶段,依据武汉市轨道交通建设有限公司对原一期工程GPS平面控制网进行复测的要求,为保证铺轨工作的正常进行,确保轨道交通一号线一、二期工程的整体性、高精度及很好的衔接,我们采取在整个轨道交通一号线工程上布设GPS框架网和三个同精度的西段短边GPS控制网(含古田车辆段)、一期工程复测GPS控制网和东段短边GPS控制网测量方案。
形成了由35个点组成的长边GPS框架网和由123个点组成的短边GPS 控制网。
为了保持与一期工程相同的外部基准,本控制网仍以禁口(C003)和武测(WUHN)作为控制网的起算点。
外业首先观测框架网,采用8台高精度的GPS仪器施测,每时段连续观测3小时以上。
然后观测非框架网控制点,并均与框架网点联测,采用每组4台GPS仪器分别从一号线的东段和西段向中间观测,并保证8台仪器同步观测,每个时段连续观测1.5小时。
在两级控制网的观测过程中,凡迁站过程中在连接边上不动的测站保持前后两个时段不关机,以便获得长时间的静态观测数据,加强连接边的强度。
由于本网长边较多,一期工程的建筑物使原一期GPS控制点的对天观测条件变差,为了实现高精度GPS平面控制网的精度要求,我们采用美国麻省理工学院GAMITGPS科研软件和精密星历,对起算点WUHN(武测)的WGS-84坐标进行了计算,并作为基线解算的起算点。
基线解算利用GPSurveyVer2.35进行。
在GPS网的外业质量检核中,考虑到本网主要求解平面坐标,不特别考虑高程方向的检核和分析,着重考虑水平方向的检核和分析。
检查结果表明,各项指标均满足规范规定的要求,质量合格。
网平差处理采用Trimble公司研制的软件Trimnet完成。
为加强整网(包括框架网和非框架网)的协调性和内部检核,首先以禁口(C003)为起算点对整网进行三维无约束平差,三维无约束平差采用290条基线向量及其相应的协方差阵进行,结果统计见表1、2。
然后,采用以C003(禁口)和WUHN(武测)为固定点,对整网进行二维约束平差。
需要说明的是,在无约束平差过程中,发现部分基线的高程方向的分量与整个GPS控制网不很兼容,为了保证整个GPS控制网的协调性、兼容性和高精度,剔除了部分基线的高程方向的分量但保留这些基线其它分由表1、2可以知,全网点位中误差均优于1.2cm,观测量改正数≤0.025m,且呈正态分布,证明基线向量中无粗差观测量,说明该网达到了较高的内符合精度。
2.2 高程基准考虑到轨道交通一号线二期工程控制测量与一期工程复测时间刚好重合,因此,在水准网方案设计时,我们将一期高程控制网复测纳入轨道交通一号线二期工程高程控制测量网中,形成了由118个点组成的水准网。
网中有6个二等水准点,有10个独立的闭合环和5条附合路线。
野外观测后,在对整个水准网外业观测成果质量评定时,发现多条附合水准路线闭合差超限,而且数值较大,分析原因可能是高程基准起算点发生了变化,因为水准路线往返较差均比较小(测段往返较差最大为+3.2mm,最小为-1.4mm,每千米水准测量的高差偶然中误差为:MΔ=±0.66mm,小于规范规定的1mm的精度要求),所构成的闭合环,其闭合差也较小,说明外业质量是比较好的。
为分析原因,我们首先采用1991年高程施测成果,分别按网中有1个、2个、…、6个高程起算点的方案进行平差计算,发现只有使用II60-2或II汉贷2一个点或II60-2与II汉岱2两个点时,平差后每千米高差中误差符合规范的要求,其余方案平差后每千米高差中误差均超限,这说明其余已知点均不同程度上发生变化。
与此同时,我们又采用水准基点稳定性分析方法进行水准基点稳定性分析,得出II60-2及II汉岱2是相对稳定的。
后根据武汉市2001年对整个城区二等水准进行复测的成果,进一步证明了我们的分析是正确的。
考虑到轨道交通一号线一、二期工程整体性和准确对接,采用了2001年武汉市城市高程基准成果6个高程点作为高程基准的起算点,利用水准网平差软件,进行网平差计算。
平差后每千米高差中误差为:m千米=±1.63mm,小于规范中规定的2mm的精度要求。
3 二期工程测量基准成果分析与评价由二维约束平差及水准平差结果,可统计出二期工程GPS测量控制点精度分布状况见表3、4。
由表3、4可以看出,平面基准所有各点精度均满足规范中规定的12mm的要求。
而高程基准最优点位(G046)中误差为0.06mm,最弱点位(G133)中误差为0.33mm,达到了较高的精度。
为了检验二期工程GPS测量结果的可靠性和正确性,分别在二期工程东段、西段及古田车辆段,对部分边长采用高精度测距仪进行了检测,与GPS测量成果相比,其结果见表5。
由表5可以看出,高精度测距仪所测边长与GPS测量边长基本吻合,这进一步说明整个GPS网的外业观测数据质量良好,基线解算精度较高。
4 一期工程辅轨前复测成果分析与评价4.1 平面基准利用2001年3月轨道交通一号线一期工程平面基准数据,与本次复测结果比较,可得各平面基准点的两次坐标较差。
其结果见表6、7。
由表6、7可知,原一期工程GPS点或TM点两次观测坐标较差绝对值最大为2.27cm,最小为0.01cm。
尽管符合《地下铁道、轻轨交通工程测量规范》中规定的较差绝对值≤5cm的要求,但根据数理统计分析结果认为GPS02、GPS03有变形。
又由平差结果可以看出,最优点位(GPS26)中误差为0.29cm,只有两个点点位中误差超过1.2cm,即GPS16及TM32。
分析原因主要是因为该两点GPS观测时条件不好,GPS16距离轻轨很近,在该点6米处盖了3层楼房子。
TM32距离轻轨更近,这在一定程度上影响了测量精度。
其余各点精度均满足规范中规定的12mm的要求。
4.2 高程基准图1画出了轨道交通一号线一期工程部分高程基准点沉降情况。
从图1可以看出:相对于首次(1999年12月)而言,整个轨道交通一号线一期工程所测的高程基准点呈现下沉的趋势,两期的沉降趋势是基本一致的,并且随着时间的推移,沉降变形趋于稳定。
5 结论1)由于本期整体GPS控制网网形复杂、控制点多、基图1相对于首次(1999年12月)的各点沉降情况线数量大和长短边相交等特点,我们在该网数据处理时采取了特殊的技术处理手段,除采用了GAMITGPS科研软件和精密星历解算外,还采用了软件Trimnet进行网平差数据处理,并将其结果与高精度测距仪所测结果进行比较分析,从而保证了GPS控制网的可靠性和精度。
2)在确保整个水准网外业观测无质量问题的情况下,对多条附合水准路线闭合差超限而且数值较大的原因,采用了水准基点稳定性分析手段和数理统计方法进行了分析。
分析结果表明:一号线沿线高程基准点有下沉的趋势,而且变化较大,这与武汉市2001年整个城区二等水准复测结果是一致的,从而保证了高程基准的可靠性和精度。
3)从二期工程平面基准来看,最优点位(G042)中误差为0.24cm,最弱点位(G039)中误差为0.86cm,所有各点精度均满足规范中规定的12mm的要求。
从二期工程高程基准来看,参与平差的各条水准路线高差无粗差存在。
由测段往返较差算得每千米水准测量高差偶然中误差为:MΔ=±0.66mm,以及由闭合环和附合水准路线闭合差算得的每千米水准测量高差全中误差为:Mw=±0.91mm,平差后每千米高差中误差为:m千米=±1.63mm,均小于规范规定的精度要求,最优点位高程中误差为0.6mm,最弱点位高程中误差为3.3mm。
4)从一期工程平面基准复测结果来看:原一期工程GPS点或TM点两次观测坐标较差绝对值最大为2.27cm,最小为0.01cm。
尽管符合规范中规定的较差绝对值≤5cm的要求,但并不说明两次观测在平面上没有系统误差,部分点位有位移的趋势。
同时,从高程基准复测结果看,由于轨道交通一号线沿线起算高程基准点变化较大,而且呈下沉的趋势,所以反映在一号线一期工程部分高程基准点也呈下沉趋势,本次相对于2001年3月结果而言,沉降最大为H8点数值为-11.9mm,沉降最小为GPS16点数值为-1.6mm,平均沉降量为-6.8mm。
这表明高程受周围环境的影响较大。
为了确保工程质量,我们建议,每一年对控制网进行复测。
参考文献[1]花向红,王新洲,王泽民,李汉武.武汉市轨道交通一号线工程坐标基准的建立及精度分析.工程勘察,2000(4).[2]王新洲,陆家驹,花向红,柳响林.武汉市轨道交通一号线一期工程测量保障体系的研究与建立.武汉大学学报(信息科学),2002(3).[3]王新洲,花向红,柳响林,田玉刚,沈彦文.武汉市轨道交通一号线一期工程基准复测分析.测绘工程,2002(3).。