第四章 机构组合原理与创新
- 格式:ppt
- 大小:490.50 KB
- 文档页数:6
实验四机构创新组合设计实验一、实验目的1、加深学生对平面机构的组成原理认识,进一步了解机构组成及运动特性。
2、训练学生的工程实践动手能力。
培养学生创新意识及综合设计的能力。
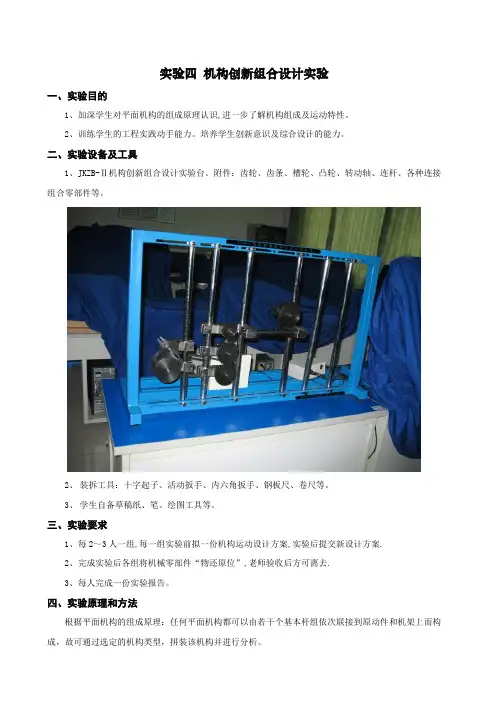
二、实验设备及工具1、JKZB-Ⅱ机构创新组合设计实验台。
附件:齿轮、齿条、槽轮、凸轮、转动轴、连杆、各种连接组合零部件等。
2、装拆工具:十字起子、活动扳手、内六角扳手、钢板尺、卷尺等。
3、学生自备草稿纸、笔、绘图工具等。
三、实验要求1、每2~3人一组,每一组实验前拟一份机构运动设计方案,实验后提交新设计方案.2、完成实验后各组将机械零部件“物还原位”,老师验收后方可离去.3、每人完成一份实验报告。
四、实验原理和方法根据平面机构的组成原理:任何平面机构都可以由若干个基本杆组依次联接到原动件和机架上而构成,故可通过选定的机构类型,拼装该机构并进行分析。
五、实验内容1、自行到实验室熟悉本实验中的实验装置,各种零部件、装拆工具的功能;了解机构的拼接方法,拟订自已的机构运动方案的拼接步骤。
2、自拟或课本提供的机构运动方案做为拼接对象。
3.拼接机构,将各基本杆组按运动传递规律顺序拼接到原动件和机架上。
4.绘制运动简图,分析所拼接的平面机构。
5.根据平面机构的组成原理,利用常用的零部件拼接调整,设计一种具有新型的带发明创造性的组合机构。
每一组提交一份机构创新设计方案。
6.最后把组合机构安装在实验平台上,进行测试分析、运动分析、实验结果分析、拟定这次实验的步骤,并写出实验报告。
六、实验方法与步骤1.学生使用“机构创新组合设计实验台”提供的各种零件。
按照自己的运动方案简图,先在桌面上进行机构的初步试验组装,这一步的目的是杆件分层。
一方面为了使各个杆件在互相平行的平面内运动,一一方面为了避免各个杆件,各个运动副之间发生运动干涉。
2.按照上一步骤试验好的分层方案,从最里层开始,依次将各个杆件组装连接到机架上。
选取构件杆,连接转动副或移动副。
凸轮。
机械创新设计复习手册第一章绪论第一节创新与创新方法1、发现是指原本早已存在的事物,经过人们不断努力和探索后被人们认知的具体结果。
2、发明是指人们提出或完成原本不存在的、经过人们不断努力和探索后提出的或完成的具体结果。
3、创造也是一种完成新成果的过程,但可能具有一定的参照物,而不强调原本不存在的事物。
4、创新是指提出或完成具有独特性、新颖性和实用性的理论或产品的过程。
5、创新与创造关系:无本质差别,创新是创造的具体实现。
但创新更强调创造成果的新颖性、独特性和实用性。
6、从创新内容分,创新分为知识创新、技术创新、应用创新。
技术创新:针对具体的事物,提出并完成具有新颖性、独特性和实用性的新产品的过程。
应用创新:把已存在的事物应用到某个新领域,并发生很大的社会与经济效益的具体实现过程。
7、创新方式:其一是由无到有的创新,其二是由有到新的创新。
8、设计指根据社会或市场的需要,利用已有的知识和经验,依靠人们思维和劳动,借助各种平台(数学方法、实验设备、计算机等)进行反复判断、决策、量化,最终实现把人、物、信息资源转化为产品的过程。
9、创新设计:是指在设计领域中,提出的新的设计理念、新的设计理论或设计方法,从而得到具有独特性和新颖性的产品。
10、机械创新设计:是指机械工程领域内的创新设计,它涉及机械设计理论与方法的创新、制造工艺的创新、材料及其处理的创新、机械产品维护及管理的创新。
第二节常规设计、现代设计与创新设计1、机械设计方法可以分为正向设计和反向设计,正向设计可以分为常规设计、现代设计和创新设计。
2、常规机械设计方法是依据力学和数学建立的理论公式和经验公式为先导,以实践经验为基础,运用图表和手册等技术资料,进行设计计算、绘图和编写设计说明书的过程。
3、现代设计方法强调以计算机为工具,以工程软件为基础,运用现代设计理念进行的机械设计。
4、机械创新设计是指充分发挥设计者的创造力,利用人类已有的相关科学技术知识,进行创新构思、设计出具有新颖性、创造性及实用性机械产品的一种实践活动。

与创新设计前一个机构的输出构件与后一个机构的输入构件刚性连接在一起,称为串联组合。
基本概念1前一个机构称为前置机构,后一个机构称为后置机构。
组成2前置机构和后置机构都是单自由度机构。
特征3根据参与组合的前、后机构连接点的不同,可分为两种串联组合方法。
分类4连接点选在作简单运动的构件(一般为连架杆)上称为Ⅰ型串联;机构的串联组合框图前置机构后置机构I型串联分类4连接点选在作复杂平面运动的构件上,称为Ⅱ型串联。
机构的串联组合框图前置机构后置机构II型串联设计要点是二机构连接点的选择Ⅰ型串联机构组合示例55组合示例Ⅱ型串联机构1实现后置机构的速度变换实现后置机构速度变换的串联组合示例1实现后置机构的速度变换实现后置机构速度变换的串联组合示例实现后置机构的速度变换1什么机构适合做实现速度变换的前置机构?链传动机构带传动机构齿轮机构实现后置机构的运动变换2改变后置机构运动规律的串联组合示例铰链机构与滑块机构的串联2实现后置机构的运动变换导杆机构与滑块机构的串联改变后置机构运动规律的串联组合示例3在满足运动要求的前提下,运动链尽量短降低系统的机械效率, 运动链过长增大传动误差按组合框图由左向右进行,即先分析运动已知的基本机构,再分析与其串联的下一个基本机构。
分析顺序按框图由右向左进行,即先根据工作对输出构件的运动要求设计后一个基本机构,然后再设计前一个基本机构。
设计顺序谢谢观看。