红绿灯自动识别小车的设计与实现
- 格式:doc
- 大小:6.01 MB
- 文档页数:66
智能交通系统中的智能红绿灯的设计与实现随着城市化进程的不断加快,交通问题一直是困扰城市发展的瓶颈之一。
因此,设计和实现智能交通系统成为了现代城市建设的重要任务之一。
而在智能交通系统中,一个关键的组成部分就是智能红绿灯系统。
在本文中,我将探讨智能红绿灯系统的设计与实现。
一、智能红绿灯系统的目标智能红绿灯系统的目标是为了提高城市交通效率,减少交通拥堵和交通事故,为行人和车辆提供更加便捷、安全和高效的出行服务。
具体来说,智能红绿灯系统的目标包括以下方面:1、提供实时的交通状况信息,实时调整交通信号配时,优化交通信号配时方案,提高交通效率和交通安全;2、为行人、车辆提供便捷的通行服务,尽可能减少等待时间,提供更加合理、有效的信号控制方案;3、提供车辆、行人的自动识别和计数服务,为交通规划和管理提供数据支持。
二、智能红绿灯系统的原理和方案智能红绿灯系统的设计原理是基于各种传感器和控制器,从车辆、行人的角度来优化交通信号配时,提高交通效率和交通安全。
具体的实现方案包括以下几个方面:1、数据采集和处理智能红绿灯系统通过采集和处理数据来获取实时的交通状况信息。
数据采集技术主要包括视频监控、车辆探测器、行人探测器、智能手机应用等多种方式,这些采集方式可以确保数据的准确性、及时性和全面性。
数据处理技术包括数字图像处理、数据挖掘、人工智能算法等。
2、信号控制智能红绿灯系统可以根据采集的数据实时调整信号配时方案,以优化交通流程,减少等待时间,提高交通效率和安全。
例如,当路口交通流量较大时,交通信号配时可以相应地调整,以避免交通拥堵和交通事故的发生。
3、自动识别和计数智能红绿灯系统可以自动识别车辆和行人,并进行计数。
这些数据为交通规划和管理提供数据支持。
例如,交通管理部门可以利用这些数据制定合理的交通规划,优化交通网络,提高城市交通效率和安全。
三、智能红绿灯系统的应用与前景智能红绿灯系统在城市交通管理中的应用和前景是非常广阔的。
汽车自动识别红绿灯系统设计吴振英1,庄树林2(1苏州工业职业技术学院,江苏苏州215104;2浙江大学,杭州310058)摘要:本项设计一种电路简单、自动化程度高、安全快捷的红绿灯自动识别装置。
介绍了以JN5148芯片为无线传感器网络实现数据无线传输的方法,每个路口的Zigbee 端定时向空间发送一个数据包,当车载中的接收端接收到数据包时,便能通过ID 字节判断出该数据包指示的是哪个路口的红绿灯信息,然后进行车辆与路口距离的检测并将信息通过OLED 显示,从而实现了对红绿灯信息的自动识别。
关键词:IEEE802.15.4;Zigbee ;自动识别;JN5148;无线传感网络;HGS128646oled 显示中图分类号:U491.5+2文献标识码:A文章编号:1001-7119(2015)07-0213-05Design of Automatic Identification System of Traffic LightsWu Zhenying 1,Zhuang Shulin 2(1.Suzhou Institute of Industrial Technology ,Suzhou 215104,China ;2.Zhejiang University ,Hangzhou 310018,China )Abstract :In this paper,a simple circuit,high designeegree of automation,safe and efficient traffic lightautomatic identification device is dd.This paper introduces a method to realize wireless data transmission in WSN with JN5148chip,Zigbee of each intersection send a packet,Vehicle device of the terminal receives the data packet,then can through the ID byte determines that indicates what the traffic lights at the information,then detection of vehicles and road distance and information through the OLED display,then to realize the automatic recognition of information.Keywords :IEEE802.15.4;Zigbee;Recognizing automatically;JN5148;wireless sensor network;display ofHGS128646oled收稿日期:2015-06-09基金项目:国家自然科学基金(项目号:21277122);江苏省高等学校大学生实践创新训练计划项目经费资助。
自动循迹小车毕业设计毕业设计:自动循迹小车摘要:本毕业设计致力于设计和制作一种自动循迹小车。
该小车能够在给定的路径上自动行驶,并根据环境中的线路进行循迹操作。
设计方案基于Arduino控制器和红外传感器实现,小车能够感知到路径上的线路,并据此进行正确的行驶操作。
此外,设计还包括电机驱动,电源供应和用户界面等功能模块。
实验结果表明,该自动循迹小车能够高效准确地行驶在指定的路径上。
关键词:1.引言2.设计原理自动循迹小车的设计方案基于Arduino控制器和红外传感器。
红外传感器能够感知到路径上的线路,从而确定小车的行驶方向。
Arduino控制器能够接收传感器的数据并根据预先编写的程序进行控制操作,例如调整电机速度和方向等。
整个设计系统的模块主要包括传感器模块,控制器模块,电机驱动模块和电源供应模块。
3.系统设计3.1传感器模块本设计中使用红外传感器来感知路径上的线路。
传感器模块负责采集红外传感器的数据,并将其传输给控制器模块进行处理。
3.2控制器模块控制器模块由Arduino控制器组成。
它通过连接传感器模块和电机驱动模块来接收传感器数据,并根据编写的程序进行控制操作。
控制器模块具有高度灵活性和可编程性,使得小车能够按照预先设定的规则行驶。
3.3电机驱动模块电机驱动模块负责控制小车的速度和方向。
根据传感器数据,控制器模块会发送相应的指令给电机驱动模块,以控制小车的行驶。
3.4电源供应模块电源供应模块为整个系统提供所需的电力。
它负责将来自电池或电源适配器的直流电源转换为小车所需的电压和电流。
4.实验结果和讨论通过设置合适的传感器感应距离,测试了自动循迹小车在给定路径上的行驶性能。
实验结果表明,该小车能够稳定地沿着给定的路径行驶,并根据环境中的线路进行循迹操作。
5.结论本毕业设计成功地设计和制作了一种自动循迹小车。
该小车能够准确地沿着给定的路径行驶,并根据环境中的线路进行循迹操作。
通过这个设计,我们可以更深入地理解自动控制和传感器应用的原理和实践。
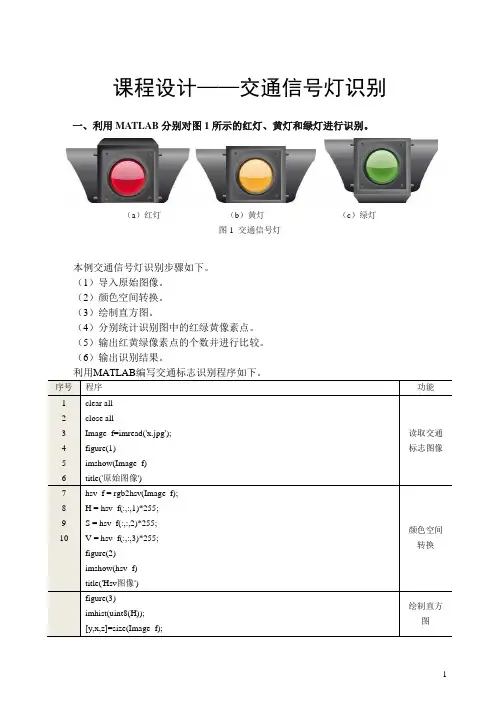
课程设计——交通信号灯识别一、利用MATLAB 分别对图1所示的红灯、黄灯和绿灯进行识别。
(a )红灯 (b )黄灯 (c )绿灯图1 交通信号灯本例交通信号灯识别步骤如下。
(1)导入原始图像。
(2)颜色空间转换。
(3)绘制直方图。
(4)分别统计识别图中的红绿黄像素点。
(5)输出红黄绿像素点的个数并进行比较。
(6)输出识别结果。
利用MATLAB 编写交通标志识别程序如下。
当输入为红灯时,输出图像如图2所示。
(a)原始红色图像(b)HSV图像(c)直方图像图2 红灯识别输出结果为Max_Red_y =15Max_Green_y =2Max_Yellow_y =1检测结果为红灯。
当输入为黄灯时,输出图像如图3所示。
(a)原始黄色图像(b)HSV图像、(c)直方图像图3 黄灯识别输出结果为Max_Red_y =13Max_Green_y =1Max_Yellow_y =95检测结果为黄灯。
当输入为绿灯时,输出图像如图4所示。
(a)原始绿色图像(b)HSV图像(c)直方图像图4 绿灯识别输出结果为Max_Red_y =0Max_Green_y =93Max_Yellow_y =78检测结果为绿灯。
二、利用上述程序,识别图5中的交通信号灯。
图5 交通信号灯当图5作为输入图像时,输出图像如图6所示。
(a)原始交通信号灯图像(b)HSV图像(c)直方图像图6 交通信号灯识别输出结果为Max_Red_y =53Max_Green_y =126Max_Yellow_y =23检测结果为绿灯。
智能红绿灯视觉识别设计研究随着城市交通的不断发展和车辆数量的增加,交通信号灯成为了管理道路交通的重要设施。
传统的交通信号灯系统存在着对人力和时间的依赖,难以适应复杂的交通环境和实时的交通流量变化。
智能红绿灯视觉识别技术的研究与设计成为了当前交通管理领域的重要课题之一。
智能红绿灯视觉识别技术是指利用计算机视觉和图像识别技术对交通信号灯进行识别和判定,从而实现智能化的交通信号控制。
这项技术的研究意义在于提高交通信号灯的控制精度和效率,减少交通事故和提升道路通行效率。
本文将从智能红绿灯视觉识别技术的原理、设计方法和未来发展方向等方面展开探讨。
一、智能红绿灯视觉识别技术的原理智能红绿灯视觉识别技术的原理是利用计算机视觉和图像处理技术对交通信号灯的图像进行分析和识别,从而确定交通信号灯的状态。
该技术通常包括图像采集、图像处理和信号状态判定三个主要过程。
对交通信号灯的图像进行采集。
传感器或摄像头可以用于实时采集道路上的交通信号灯图像,将图像信息传输给计算机进行处理。
然后,对采集到的图像进行处理。
图像处理的目标是提取出交通信号灯的特征信息,如红、黄、绿三种颜色,以及灯的形状和位置等。
在这个过程中,常用的图像处理方法包括边缘检测、色彩分割、形状匹配等。
通过这些方法,可以将图像中的交通信号灯部分分割出来,并提取出相应的特征。
利用图像处理得到的特征信息,对交通信号灯的状态进行判定和识别。
这一步可以借助机器学习和模式识别等技术,通过对交通信号灯状态的预测和分类,实现对信号灯状态的自动识别和判定。
在实际应用中,智能红绿灯视觉识别技术的设计需要考虑诸多因素,包括环境光线、交通流量、信号灯的类型和位置等。
基于这些因素,可以采用多种方法和技术进行设计。
针对不同环境光线下的图像采集,可以考虑使用不同的传感器和摄像头,并调整图像采集的参数,如曝光度、对比度等,以获得清晰度和稳定性较高的图像。
针对不同交通流量和信号灯类型的情况,可以采用不同的图像处理和模式识别技术。

毕业设计智能小车毕业设计智能小车近年来,随着科技的不断进步和发展,智能化已经渗透到我们生活的方方面面。
从智能手机到智能家居,从智能穿戴设备到智能交通工具,无处不体现着智能科技的力量。
而在毕业设计中,我选择了一个与智能化密切相关的主题——智能小车。
智能小车是一种集机械、电子、计算机等多种技术于一体的智能交通工具。
它能够通过传感器感知周围环境,通过计算机进行数据处理和判断,并通过执行器实现自主导航和行驶。
在这个项目中,我将设计一个能够自主行驶、避开障碍物、遵守交通规则的智能小车。
首先,我将通过搭建一个传感器系统来实现智能小车的环境感知功能。
传感器系统可以包括激光雷达、摄像头、红外线传感器等多种传感器,用于感知车辆周围的障碍物、道路状况等信息。
通过这些传感器,智能小车可以获取到实时的环境数据,并通过算法进行分析和处理。
接着,我将设计一个智能控制系统,用于处理传感器获取到的数据,并做出相应的决策。
智能控制系统可以采用深度学习、机器学习等人工智能算法,通过训练和学习,使得智能小车能够根据不同的情况做出合理的行驶决策。
例如,在遇到红灯时,智能小车会主动停下来等待绿灯;在遇到行人时,智能小车会减速或停车等待行人通过。
同时,我还将为智能小车设计一个自主导航系统,使其能够在未知环境中自主行驶。
自主导航系统可以通过地图、定位系统和路径规划算法来实现。
智能小车可以通过地图获取到当前位置和目标位置,并通过路径规划算法确定最优行驶路径。
在行驶过程中,智能小车可以通过定位系统实时获取自身位置,从而实现精确的导航和行驶。
此外,为了提高智能小车的安全性和稳定性,我还将设计一个底盘控制系统,用于控制车辆的速度、转向等参数。
底盘控制系统可以通过电机和舵机等执行器来实现。
通过合理的控制算法和参数调整,可以使得智能小车在行驶过程中更加平稳和稳定,提高行驶的安全性和舒适性。
最后,在整个设计过程中,我将注重实践和测试,不断优化和改进智能小车的性能。
基于计算机视觉的交通标志识别系统设计与实现一、引言随着交通事故的增多,人们越来越关注道路交通事故的预防与防范。
交通标志的作用至关重要。
深度学习在计算机视觉领域被广泛应用,也逐渐被应用到交通标志识别中,为交通安全提供了便利性的同时,也为相关学术领域提供了更多探索的机会。
二、交通标志识别技术现状目前,深度学习技术已经成功应用到交通标志识别领域中。
这种计算机视觉技术利用现有图像数据库来训练卷积神经网络,并结合标注信息对交通标志进行识别。
该技术已经在行人识别、车牌识别、人脸识别等领域中得到广泛应用。
三、交通标志识别系统设计本系统主要分为四个部分:数据库模块、图像处理模块、特征提取模块和分类器模块。
1. 数据库模块数据库模块主要用于存储和管理交通标志图像,并将其与标签信息一一对应。
该模块的构建需要充分考虑存储空间和运行效率。
2. 图像处理模块图像处理模块的主要任务是处理原始图像,将其转化为模型所需的格式,并进行预处理。
此处需要对数字图像处理技术有深入了解。
该模块需要实现的主要功能包括图像增强、去噪等操作。
3. 特征提取模块特征提取模块是整个系统的核心所在,其目的是将经过预处理的图像转换为易于分类器处理的向量。
目前,深度学习技术中常用的有两种:基于卷积神经网络的特征提取和基于矢量量化的特征提取。
前者更加高效、准确,但比较耗费计算资源;后者比较高效、稳定,适合较大规模的图像分类应用。
4. 分类器模块分类器模块可根据实际需求选择不同的分类器模型。
通常,深度学习技术中常用的分类器主要有:支持向量机(SVM)、逻辑回归(Logistic Regression)、决策树(Decision Trees)等。
不同的分类器模型对识别效率和准确率的影响也不同。
四、交通标志识别系统实现本系统的实现采用Python语言编写,具体涉及到的框架和类库有OpenCV、Keras、TensorFlow等。
具体实现过程如下:1. 数据库模块:数据库使用MySQL实现,通过MySQL的存储过程实现图像和标签的批量导入导出。
汽车自动驾驶技术中的红绿灯识别与控制随着科技的不断发展与进步,汽车自动驾驶技术已经成为了未来交通出行的重要发展方向。
在实现完全自动化驾驶之前,红绿灯的识别与控制是汽车自动驾驶技术中的一个关键问题。
本文将探讨红绿灯识别与控制在汽车自动驾驶技术中的重要性,并介绍当前红绿灯识别与控制技术的发展现状。
红绿灯识别与控制在汽车自动驾驶技术中起着至关重要的作用。
红绿灯是路口交通流量的调节者,也是保障道路安全的重要组成部分。
对红绿灯的准确识别与控制,能够让自动驾驶汽车在道路交通中更加安全和高效地行驶,避免交通事故的发生。
此外,红绿灯的识别与控制也直接关系到交通流量的合理分配,提高交通运输的效率与便利性,减少拥堵和排放等问题。
目前,红绿灯识别与控制技术在汽车自动驾驶领域已经取得了一定的进展。
主要通过两种方式进行红绿灯的识别:一种是利用传感器和摄像头对红绿灯进行视觉识别,另一种是利用车联网技术通过交通信号灯系统获取红绿灯状态。
视觉识别技术是目前较为主流的识别方式,它包括图像处理、计算机视觉和深度学习等技术的应用。
在视觉识别方面,利用摄像头对红绿灯进行拍摄,然后通过车载计算机对拍摄的图像进行处理和分析,从而判断红绿灯的状态。
这需要对红绿灯的特征进行提取和分析,比如颜色、形状、位置等特征。
通过对这些特征的分析和比对,可以准确地判断出红绿灯的状态,从而进行相应的控制和行驶策略的制定。
另一种红绿灯识别与控制的方式是利用车联网技术。
通过与交通信号灯系统的无线通信,汽车可以获取到红绿灯的状态信息。
这种方式可以减少对图像处理的依赖,提高识别准确率和实时性,特别是在复杂路况下。
然而,这种方式需要与交通信号灯系统进行有效的通信,而且对交通信号灯系统的智能化有较高的要求。
尽管红绿灯识别与控制技术已经取得了一定的进展,但仍然面临一些挑战与问题。
首先,红绿灯的形状、颜色和位置在不同国家和地区可能存在一些差异,这就需要对不同地区的红绿灯进行适应性处理。
智能寻迹小车设计与实现摘要:本课题是基于AT89C52单片机的智能小车的设计与实验,设计主要有三个模块,包括信号检测模块、主控模块、电机驱动模块。
小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。
采用L298电机驱动及PWN电机调速,利用红外对管传感器检测黑线达到循迹目的,以及自动停车,自动循迹。
整体系统的电路结构简单,可靠性高。
关键词:AT89C52单片机 L298电机驱动及PWN电机调速自动循迹Smart car tracingAbstract:This subject is the design and experiment of intelligent car based on AT89C52 single-chip microcomputer, the design has three main modules, including the module of signal detection module, main control module, motor. The main function of the car is able to independently identify black guide line and according to the black line to achieve rapid and stable line running. Using L298 motor and PWN motor, the tube sensor to detect black line to tracking objective using infrared, and automatic stop, automatic tracking. The circuit construction of whole system is simple, high reliability.Keyword :AT89S52 Microcomputer L298 motor and PWN motor automatic tracking目录第一章前言..................................... 错误!未定义书签。
红绿灯自动识别小车的设计与实现(软件)The traffic light automatic recognition ofcar design and Implementation (software)目录摘要 (I)关键词 (I)Abstract (I)Key words (II)1 前言 (1)2 设计方案选择与论证 (4)2.1 设计要求 (4)2.2 总体设计方案选择 (4)2.2.1 智能小车模型设计方案 (4)2.2.2 电机方案的选择 (5)2.2.3 控制单元方案 (6)2.2.4 小车循迹模块方案 (7)2.2.5 红绿灯信号识别方案 (8)2.2.6 短距离通信方案 (8)3 系统设计功能分析 (9)3.1.2 L298N驱动逻辑功能分析 (9)3.1.3 L298N部功能及引脚分布 (10)3.2 一体化红外接收探头HS0038功能分析 (11)3.2.1 HS0038介绍 (11)3.2.2 HS0038部电路及参数分析 (12)3.2.3 HS0038接收信号原理 (13)3.3 红外对管ST188功能分析 (14)3.3.1 ST188介绍 (14)3.3.2 ST188光电特性与检测分析 (14)3.3.3 ST188红外循迹原理分析 (16)3.4单片机控制红绿灯功能分析 (18)3.4.1 红绿灯路口设计规划 (18)3.4.2 红绿灯功能实现简要分析 (19)3.5 基带信号红外发射调制功能分析 (19)3.5.1 红外发光二极管发射原理分析 (19)3.5.2 波特率分析 (20)4 系统总体硬件设计及单元电路实现 (21)4.1 小车模块系统组成及框图 (21)4.2 红绿灯系统控制模块组成及系统框图 (22)4.3 各个单元电路硬件设计实现 (23)4.3.1 小车控制各部分电路实现 (23)4.3.2 红绿灯系统各部分电路实现 (27)5 软件设计分析与实现 (29)5.1 软件设计思想 (29)5.2 红绿灯系统软件实现与分析 (29)5.2.1定时器中断系统 (30)5.2.2 红绿灯显示与数码管动态显示 (31)5.2.3 数据发送模块 (32)5.3 小车模块软件实现与分析 (36)5.3.1 小车软件框架分析 (36)5.3.2 数据接收处理模块 (36)5.3.2电机控制模块 (39)5.4 小车整体工作过程 (40)6 软件调试试验 (41)7 总结 (44)参考文献 (46)致 (47)附录A:整体系统硬件电路图 (48)附录B:源程序代码 (49)红绿灯自动识别小车的设计与实现摘要现今是一个走过了工业时代、信息时代跨入知识经济的时代,这个时代对信息高速化,控制智能化的要求越来越高。
智能红绿灯视觉识别设计研究1. 引言1.1 研究背景在城市交通中,红绿灯是交通信号控制系统中至关重要的部分,它直接关系到交通流畅和交通安全。
传统的红绿灯系统存在诸多问题,如无法动态调整信号灯的时长、难以适应不同时间段和路况的交通流量等。
随着人工智能和计算机视觉技术的发展,智能红绿灯视觉识别技术逐渐引起了人们的关注。
通过使用摄像头和图像处理技术,智能红绿灯系统能够实时监测交通情况,智能地调整信号灯的时长,从而提高交通效率,降低交通事故的发生率。
研究智能红绿灯视觉识别技术的背景是为了解决传统红绿灯系统存在的问题,并提升交通信号控制系统的智能化水平。
随着城市交通的日益复杂和车辆数量的增加,传统的红绿灯系统已经无法满足交通管理的需求。
针对智能红绿灯视觉识别技术的研究具有重要的理论和实践意义。
通过深入研究智能红绿灯视觉识别技术,可以为城市交通管理提供更加有效和智能的解决方案,促进城市交通的发展和进步。
1.2 研究目的本文旨在探讨智能红绿灯视觉识别设计的研究,以解决传统红绿灯控制系统存在的一些问题,提高交通管理的效率和安全性。
在城市交通系统中,红绿灯是控制车辆通行的重要设备,而传统的定时控制方式往往无法灵活应对不同时间段的交通流量变化,容易导致交通拥堵和事故发生。
通过引入智能红绿灯视觉识别技术,可以实现对交通流量的实时监测和分析,从而实现智能化的信号控制,提高交通通行效率。
本研究的具体目的包括:1. 分析现有的红绿灯控制系统存在的问题和局限性,为设计智能红绿灯视觉识别系统提供参考;2. 探讨智能红绿灯视觉识别技术在实际应用中的可行性和有效性;3. 研究智能红绿灯视觉识别算法的优化和改进方法,提升识别准确率和稳定性;4.通过实验结果和分析,验证智能红绿灯视觉识别系统在交通流量控制中的优势和效果;5. 展望智能红绿灯视觉识别技术在未来交通管理领域的应用前景,为相关研究和实践提供指导和参考。
通过本研究的开展,旨在为提升城市交通管理水平和优化交通流量控制提供新的思路和方法。
《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的飞速发展,智能小车作为智能交通系统的重要组成部分,已经广泛应用于军事、工业、民用等多个领域。
自循迹智能小车控制系统的设计与实现,成为了智能化进程中一个关键环节。
本文旨在阐述自循迹智能小车控制系统的设计原理和实现过程,分析系统结构与功能,为相关研究与应用提供参考。
二、系统设计1. 硬件设计自循迹智能小车控制系统硬件主要包括:电机驱动模块、传感器模块、主控制器模块等。
其中,电机驱动模块负责驱动小车前进、后退、转向等动作;传感器模块包括红外传感器、超声波传感器等,用于检测小车周围环境及路径信息;主控制器模块采用高性能微控制器,负责协调各模块工作,实现小车的自主循迹。
2. 软件设计软件设计包括控制系统算法设计和程序编写。
控制系统算法主要包括路径识别算法、速度控制算法、避障算法等。
程序编写采用模块化设计思想,将系统功能划分为多个模块,如电机控制模块、传感器数据采集模块、路径识别与决策模块等。
各模块之间通过通信接口进行数据交换,实现小车的自主循迹。
三、实现过程1. 传感器数据采集与处理传感器模块负责采集小车周围环境及路径信息,包括红外传感器、超声波传感器等。
这些传感器将采集到的数据传输至主控制器模块,经过数据处理与分析,提取出有用的信息,如障碍物位置、路径边界等。
2. 路径识别与决策路径识别与决策模块根据传感器数据,判断小车当前位置及目标路径,并制定相应的行驶策略。
当小车偏离目标路径时,系统会自动调整行驶方向,使小车重新回到目标路径上。
此外,避障算法也在此模块中实现,当检测到障碍物时,系统会及时调整小车的行驶方向,避免与障碍物发生碰撞。
3. 电机控制与驱动电机控制与驱动模块根据主控制器的指令,控制电机的运转,实现小车的前进、后退、转向等动作。
通过调整电机的转速和转向,可以实现对小车速度和行驶方向的精确控制。
四、实验结果与分析通过实验测试,自循迹智能小车控制系统能够在不同环境下实现自主循迹和避障功能。
城市交通中的智能红绿灯系统设计智能红绿灯系统是一种基于计算机视觉和智能算法的交通信号控制系统,旨在提高城市交通效率和安全性。
它利用传感器、摄像头和信号控制算法来检测和控制交通流量,优化信号配时,以最大程度地减少交通阻塞和延迟。
下面将详细介绍智能红绿灯系统的设计。
首先,智能红绿灯系统需要采集交通数据。
这可以通过安装在红绿灯上的摄像头和传感器来实现。
摄像头可以实时捕捉道路上的交通状况,包括车辆数量、车辆类型和车辆运行速度等信息。
传感器可以检测道路上的车辆流量和行人流量,以及环境因素如天气和时间等。
数据采集可以通过无线网络传输到中央控制中心进行进一步分析和处理。
其次,智能红绿灯系统需要实时交通数据分析和处理。
中央控制中心通过接收和分析交通数据来判断道路上的交通状况,并根据数据进行相应的信号控制调整。
交通数据可以通过深度学习算法和机器学习算法进行处理,从而提取有用的信息如交通流量、拥堵程度和预测未来的交通趋势等。
基于这些信息,系统可以优化信号配时并自动调整红绿灯时长,以提高交通效率和减少拥堵。
第三,智能红绿灯系统需要实现自适应信号控制。
根据交通数据的分析结果,系统可以根据不同的交通状况自动调整红绿灯的时长和配时方式。
例如,当其中一条道路拥堵时,系统可以减少该道路的红灯时长,增加绿灯时长和优先通过其他道路的流量。
通过自适应信号控制,智能红绿灯系统可以最大限度地减少交通延迟和拥堵。
最后,智能红绿灯系统需要具备高可靠性和安全性。
在设计系统时,应考虑到故障和网络中断等突发情况,确保系统能够正常运行并保持交通安全。
此外,系统还应具备远程监控和管理功能,以便通过中央控制中心对不同红绿灯进行实时监管和调控。
综上所述,智能红绿灯系统设计需要从数据采集、实时分析和处理、自适应信号控制以及可靠性和安全性等方面进行考虑。
这样的系统可以大大提高城市交通效率和安全性,减少交通阻塞和延迟,提升居民的出行体验。
面向智能交通的智能红绿灯系统设计与实现智能红绿灯系统是现代智能交通系统中不可或缺的一部分,它可以有效地管理交通流量,提高道路安全性和通行效率。
本文将重点介绍面向智能交通的智能红绿灯系统的设计与实现。
智能交通系统是指利用先进的信息通信技术、传感器以及人工智能等技术,实现对交通流量、路况和车辆信息的实时监测、分析和管理的系统。
智能红绿灯系统作为智能交通系统的核心部分,其设计与实现显得尤为重要。
首先,智能红绿灯系统需要具备实时检测交通流量的能力。
通过安装在红绿灯上的摄像头、传感器等设备,可以获取道路上车辆的数量、车速以及车辆行驶方向等信息。
同时,还可以通过引入车牌识别技术,对交通流量进行精确统计和分析。
这些数据将成为调整红绿灯周期和信号灯配时的重要依据。
其次,智能红绿灯系统需要具备数据处理和决策分析的能力。
收集到的交通数据需要进行实时处理和分析,以得出合理的信号灯配时方案。
这需要借助于先进的人工智能算法和大数据技术,对交通流量进行建模和预测。
利用机器学习等技术,可以识别出交通拥堵区域,并根据实时的交通情况动态调整红绿灯周期,以减少交通堵塞。
另外,智能红绿灯系统还需要具备实时协同控制的能力。
针对交叉口的红绿灯系统,需要通过网络互联,实现交叉口之间红绿灯配时的协同控制。
当一个道路上车流量较大时,通过系统的协调,可以调整其他道路的红绿灯信号,优先引导交通流量,从而提高整个交通系统的效率。
在智能红绿灯系统的实现中,还可以考虑引入可视化界面和交互功能。
通过在红绿灯控制室的电脑终端上显示交通流量、红绿灯配时方案等信息,并提供人机交互界面,操作员可以根据实时的交通情况进行调整。
此外,还可以利用手机应用等方式,让驾驶员和行人能够实时获取红绿灯信息,为他们提供更便利的交通出行体验。
最后,智能红绿灯系统还需要考虑安全性和可靠性的问题。
由于交通事故可能对人身安全造成威胁,智能红绿灯系统需要具备高可靠性和故障容错能力。
系统的设计应考虑多重备份和冗余设计,以保证系统的稳定运行。
道路车辆识别系统设计与实现随着现代交通事故数量的不断增加,道路交通安全问题已经引起了广泛关注。
在这种情况下,为了提高道路交通管理的效率和安全性,道路车辆识别系统逐渐被广泛采用。
在本文中,将详细介绍道路车辆识别系统的设计和实现过程。
一、系统概述道路车辆识别系统是一种自动识别和追踪车辆的系统,它可以通过车牌号码、车身颜色、车型等特征信息来识别车辆。
该系统由摄像头、图像处理模块、车辆检测模块和数据库管理模块等几个核心组成部分构成。
摄像头负责获取车辆图像,图像处理模块用于提取图像特征,车辆检测模块用于识别和追踪车辆,数据库管理模块用于存储识别数据。
二、系统设计2.1 摄像头选择要设计一个效果好的道路车辆识别系统,选择好摄像头是至关重要的。
对于道路车辆识别系统而言,摄像头的选取需要满足以下要求:1.分辨率高:车辆的特征信息比较细小,分辨率低的摄像头很难捕捉到细节。
2.鲁棒性强:摄像头要耐受各种天气条件,如雨、雾、晴天等。
3.适应性强:对于不同的车道、车速,摄像头需要具有不同的调节能力。
4.成本低:满足以上条件的摄像头成本较高,应选择价格合适的产品。
2.2 图像处理当图像被摄像头采集后,需要对图像进行处理以提取特征信息。
这个过程分为两个主要部分:预处理和特征提取。
预处理包括图像的增强,包括调整亮度、对比度等操作。
在此基础上,特征提取便是通过图像的轮廓、颜色、纹理等信息来进行。
2.3 车辆检测车辆检测模块用于从图像中提取车辆的特征,识别车辆类型和车牌号。
车辆的特征信息包括车辆的大小、形状、颜色等,而车牌号码的信息包括字体、大小、颜色等。
我们使用传统的机器视觉技术,如Haar级联检测器、边缘检测和灰度共生矩阵等,以实现图像特征的提取和车辆识别的目的。
2.4 数据库管理通过数据库管理模块,我们能够存储包括车牌号、车辆类型、进入和离开时间等信息。
这些信息可以用于统计车辆信息,提高道路交通管理效率。
三、系统实现3.1 软件设计在软件设计方面,我们使用Java编程语言完成了系统的开发。
自动驾驶小车设计方案及流程一、整体设计思路。
1. 功能定位。
自动驾驶小车得满足一些基本功能,这就像盖房子打地基一样重要。
它要能在各种道路环境下安全行驶,不管是平坦的大马路,还是有点小坑洼的小道。
而且得能识别交通标志,就像人能看懂红绿灯一样理所当然。
这小车啊,还得有避障功能,可不能像个莽撞的小牛犊似的到处乱撞。
1.2 用户需求。
二、硬件设计。
2.1 传感器系统。
传感器就像是小车的眼睛和耳朵。
摄像头得安排上,而且还不能是一个,多个摄像头就像多双眼睛,可以全方位观察周围情况。
激光雷达也不能少,它就像一个精确的测量员,能精确地测量出与障碍物的距离。
毫米波雷达呢,在恶劣天气下就发挥大作用了,就像在大雾天里的一盏明灯。
2.2 动力系统。
动力系统是小车的心脏。
电动机得选个合适的,功率不能太小,不然就成了小马拉大车,跑起来慢吞吞的。
电池也很关键,续航能力得强,要是开一会儿就没电了,那就成了“巧妇难为无米之炊”了。
2.3 车身结构。
车身结构要坚固,得像钢铁侠的盔甲一样。
但同时又不能太重,太重的话会影响小车的灵活性,就像一个大胖子跳舞,怎么看都别扭。
外观设计也要符合空气动力学,这样跑起来才顺畅,就像鱼儿在水里游一样自在。
三、软件设计。
3.1 控制系统。
控制系统得像一个精明的指挥官。
它要能处理传感器传来的各种信息,然后做出正确的决策。
比如说前面有个障碍物,它得马上决定是减速还是转弯。
这控制系统可不能是个糊涂蛋,必须得精准无误。
3.2 人机交互界面。
人机交互界面得友好。
就像和朋友聊天一样轻松自然。
操作界面要简洁明了,不能让人看着就头疼,像看天书似的。
比如说,启动、停止这些功能的按钮要很容易找到,让用户可以轻松上手,不要搞得太复杂,那可就“画蛇添足”了。
四、测试与优化。
4.1 测试环节。
测试可不能马虎,要像考试检查试卷一样认真。
在不同的环境下测试,像晴天、雨天、白天、晚上都要试试。
还要模拟各种突发情况,看看小车的反应是不是灵敏。
红绿灯自动识别小车的设计与实现(软件)The traffic light automatic recognition ofcar design and Implementation (software)目录摘要 (I)关键词 (I)Abstract (I)Key words.......................................................... I I1 前言 (1)2 设计方案选择与论证 (4)2.1 设计要求 (4)2.2 总体设计方案选择 (4)2.2.1 智能小车模型设计方案 (4)2.2.2 电机方案的选择 (5)2.2.3 控制单元方案 (6)2.2.4 小车循迹模块方案 (7)2.2.5 红绿灯信号识别方案 (8)2.2.6 短距离通信方案 (8)3 系统设计功能分析 (9)3.1.2 L298N驱动逻辑功能分析 (9)3.1.3 L298N内部功能及引脚分布 (10)3.2 一体化红外接收探头HS0038功能分析 (11)3.2.1 HS0038介绍 (11)3.2.2 HS0038内部电路及参数分析 (12)3.2.3 HS0038接收信号原理 (13)3.3 红外对管ST188功能分析 (14)3.3.1 ST188介绍 (14)3.3.2 ST188光电特性与检测分析 (14)3.3.3 ST188红外循迹原理分析 (16)3.4单片机控制红绿灯功能分析 (17)3.4.1 红绿灯路口设计规划 (17)3.4.2 红绿灯功能实现简要分析 (18)3.5 基带信号红外发射调制功能分析 (19)3.5.1 红外发光二极管发射原理分析 (19)3.5.2 波特率分析 (20)4 系统总体硬件设计及单元电路实现 (21)4.1 小车模块系统组成及框图 (21)4.2 红绿灯系统控制模块组成及系统框图 (21)4.3 各个单元电路硬件设计实现 (22)4.3.1 小车控制各部分电路实现 (22)4.3.2 红绿灯系统各部分电路实现 (25)5 软件设计分析与实现 (27)5.1 软件设计思想 (27)5.2 红绿灯系统软件实现与分析 (28)5.2.1定时器中断系统 (29)5.2.2 红绿灯显示与数码管动态显示 (29)5.2.3 数据发送模块 (31)5.3 小车模块软件实现与分析 (35)5.3.1 小车软件框架分析 (35)5.3.2 数据接收处理模块 (36)5.3.2 电机控制模块 (39)5.4 小车整体工作过程...........................错误!未定义书签。
6 软件调试试验 (41)7 总结 (44)参考文献 (46)致谢 (47)附录A:整体系统硬件电路图 (48)附录B:源程序代码 (49)红绿灯自动识别小车的设计与实现摘要现今是一个走过了工业时代、信息时代跨入知识经济的时代,这个时代对信息高速化,控制智能化的要求越来越高。
而智能化同样已经延伸到生活中,如:智能冰箱,智能热水器,智能空调等等,其发展速度之快,从身边的这些例子很容易体会到。
其发展前景可谓是相当可观。
因为他实现了无人管理,为人类生活带来了方便。
本设计以智能小车为核心模块,实现对红绿灯的自动识别,从而模拟生活当中的红绿灯交通系统,实现对过往车辆的流通控制。
采用AT89S51单片机作为小车控制的核心芯片。
小车采用的是直流电机来进行驱动,于此同时,为方便小车行走,还采用了红外对管模块来实现寻迹的功能,从而控制小车行走的路线。
之所以小车能识别红绿灯,这主要是依靠了单片机之间的通信,即红绿灯系统,它同样也是使用了一块AT89S51单片机作为中枢控制,产生3组红绿灯信号,分别对应前进,左转,右转信号,同时利用单片机串口通信,与小车之间进行通信,这个过程是利用红外发射模块将数据码发射出去,对应的小车上接收头讲接收到的信息返还到单片机中进行判决,控制。
本设计使用性很强,对于模拟控制研究有很大的帮助,相信未来必能很好的为我们的社会服务。
关键词智能小车;红绿灯;自动识别;循迹;红外通信The traffic light automatic recognition ofcar design and ImplementationAbstractToday is a walk of the industrial age, information age into the knowledgeeconomy era, this era of increasingly high requirements of the information superhighway, intelligent control. Intelligent the same has been extended to the life, such as: smart refrigerators, smart water heater, intelligent air-conditioning, etc., is growing faster than from the side of these examples it is easy to understand. Prospects for its development can be described as considerable. Because he realized the lack of management, in order to bring the convenience of human life.Smart car, the design for the core modules, automatic identification of traffic lights, traffic lights to simulate life transport system, control the flow of passing vehicles. AT89S51 micro-controller as the core chip of car control. The car is a DC motor to be driven Meanwhile, for the convenience of car walking, infrared tube module tracing, in order to control the routes of trolley travel. The reason why the car can recognize traffic lights, mainly rely on the communication between the micro-controller and the traffic light system, it is also used a AT89S51 micro-controller as the central control, resulting in a set of traffic lights signal, corresponding to forward, turn left and right turn signal , while the use of single-chip serial communication, and to communicate between the car, which is mainly infrared transmitter module launched, the data code corresponding to the small car to receive the first to talk about the information received judgments, control returned to the micro-controller. This design uses a very strong analog control study of great help, I believe the future will be able to be very good for our social services.Key wordsSmart car; traffic lights; automatic identification; tracking; Infrared communication1 前言随着科学技术不断发展,机器人的研究也越来越深入,机器人技术的发展,是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术。
智能小车作为机器人的一种,其发展也是很迅速的,具有很高的研究价值。
智能车辆作为智能交通系统的重要组成部分,能够提高驾驶安全性,大幅改善公路交通效率,降低能源消耗量,该技术的研究日益受到国内外学者的关注。
其研究的主要目的在于降低日趋严重的交通事故发生率,提高现有道路交通的效率,在某种程度上缓解能源消耗和环境污染等问题。
智能车辆利用各种传感技术获取车体自身和车外环境的状态信息,经过智能算法对其进行分析、融合处理,将最终的决策结果传递给驾驶者,在危险发生之前,提醒驾驶员做出必要的回避动作,避免事故发生;在紧急状况下,驾驶者无法做出反应时,智能车辆则自主完成规避危险任务,帮助驾驶人员避免危险发生。
美国开始组织实施智能车辆先导( intelligent vehicle ini2tiative, IV I) 计划 , 欧洲提出公路安全行动计划( road safety action program, RSAP) ,日本提出超级智能车辆系统。
我国科技部则于2002年正式启动了“十五”科技攻关计划重大项目 ,智能交通系统关键技术开发和示范工程,其中一个重要的内容就是进行车辆安全和辅助驾驶的研究。
预计在2020年之前进入智能交通发展的成熟期,人、车、路之间可以形成稳定、和谐的智能型整体。
而一些发达国家开发和研制智能车辆已经有10余年的时间,特别是欧美已有相对成熟的经验。
本次设计的红绿灯自动识别小车就是遵循智能小车中的自动驾驶系统理念:自主驾驶系统是智能车辆研究的最高级阶段,车辆能够通过车内的传感器感知车身和环境信息,利用各种智能算法进行决策控制,并以此作为依据,实现自主行驶任务。
其中,如何使智能车辆与普通车辆共同行驶在现有道路之中也是有待于攻破的难题之一。
智能小车的发展主要是在自动化控制领域,一些大中专院校为了培养学生动手及编程能力,同时提高学生的兴趣,为智能小车控制领域提供了环境。