第6章机械的平衡
- 格式:ppt
- 大小:561.00 KB
- 文档页数:5
第6章 机械的平衡6.1 复习笔记本章主要介绍了刚性转子的静平衡和动平衡计算和平面机构的完全平衡和部分平衡的计算。
学习时需要重点掌握刚性转子的静平衡和动平衡计算(质径积的计算),常以计算题的形式考查,而且几乎每年必考。
除此之外,静(动)平衡条件、完全平衡、部分平衡等内容,常以选择题、填空题和判断题的形式考查,复习时需要把握其具体内容,重点记忆。
一、机械平衡的目的及内容1.机械平衡的目的(1)设法平衡构件的不平衡惯性力,以消除或减小其带来的不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需研究如何合理利用不平衡惯性力。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡(见表6-1-1)表6-1-1 绕固定轴回转的构件的惯性力平衡(2)机构的平衡作平面复合运动或往复移动的构件产生的惯性力无法在构件本身上找到平衡,必须研究整个机构使各运动构件惯性力的合力以及合力偶得到完全的或部分的平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算(见表6-1-2)表6-1-2 刚性转子的平衡计算图6-1-1 刚性转子的平衡计算三、刚性转子的平衡实验1.静平衡实验(见表6-1-3)表6-1-3 静平衡实验2.动平衡实验试验一般需在动平衡机上进行,动平衡机的内容见表6-1-4。
表6-1-4 动平衡机3.现场平衡对于一些大型和高速转子,由于装运、蠕变、电磁场或工作温度等的影响会破坏制造期间的平衡。
若制造期间的平衡遭到破坏,可在现场直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
四、转子的许用不平衡量和许用不平衡度(见表6-1-5)表6-1-5 转子的许用不平衡量和许用不平衡度图6-1-2 许用不平衡量的分配五、平面机构的平衡。

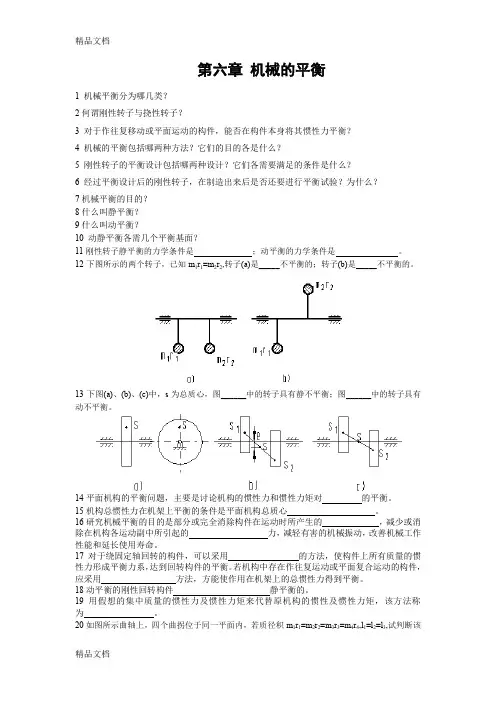
第六章机械的平衡1 机械平衡分为哪几类?2何谓刚性转子与挠性转子?3 对于作往复移动或平面运动的构件,能否在构件本身将其惯性力平衡?4 机械的平衡包括哪两种方法?它们的目的各是什么?5 刚性转子的平衡设计包括哪两种设计?它们各需要满足的条件是什么?6 经过平衡设计后的刚性转子,在制造出来后是否还要进行平衡试验?为什么?7机械平衡的目的?8什么叫静平衡?9什么叫动平衡?10 动静平衡各需几个平衡基面?11刚性转子静平衡的力学条件是;动平衡的力学条件是。
12下图所示的两个转子,已知m1r1=m2r2,转子(a)是_____不平衡的;转子(b)是_____不平衡的。
13下图(a)、(b)、(c)中,s为总质心,图______中的转子具有静不平衡;图______中的转子具有动不平衡。
14平面机构的平衡问题,主要是讨论机构的惯性力和惯性力矩对的平衡。
15机构总惯性力在机架上平衡的条件是平面机构总质心。
16研究机械平衡的目的是部分或完全消除构件在运动时所产生的,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
17对于绕固定轴回转的构件,可以采用的方法,使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存在作往复运动或平面复合运动的构件,应采用方法,方能使作用在机架上的总惯性力得到平衡。
18动平衡的刚性回转构件静平衡的。
19用假想的集中质量的惯性力及惯性力矩来代替原机构的惯性及惯性力矩,该方法称为。
20如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?为什么?21图示一盘形回转体,其上有四个不平衡质量,它们的大小及质心到回转轴线的距离分别为:m 110=kg ,214kg m =,316kg m =,420kg m =,1200mm r =,r 2400=mm ,3300mm r =,4140mm r =,欲使该回转体满足静平衡条件,试求需加平衡质径积m r b b 的大小和方位。
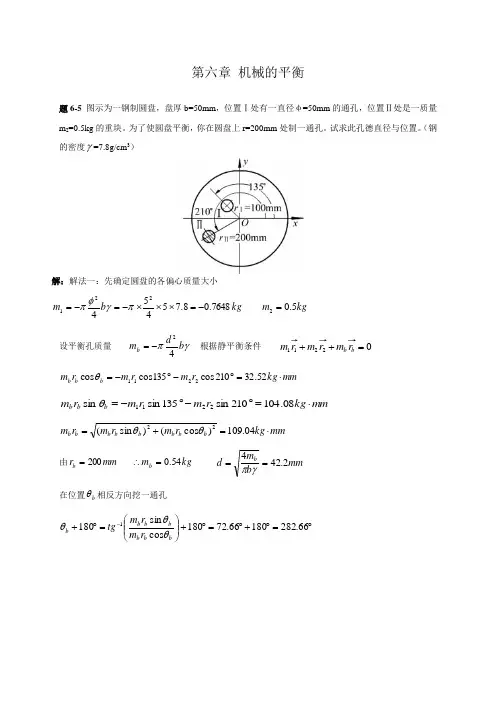
第六章 机械的平衡题6-5 图示为一钢制圆盘,盘厚b=50mm ,位置Ⅰ处有一直径φ=50mm 的通孔,位置Ⅱ处是一质量m 2=0.5kg 的重块。
为了使圆盘平衡,你在圆盘上r=200mm 处制一通孔。
试求此孔德直径与位置。
(钢的密度γ=7.8g/cm 3)解:解法一:先确定圆盘的各偏心质量大小kg b m 7648.08.75454221-=⨯⨯⨯-=-=πγφπ kg m 5.02=设平衡孔质量γπb d m b 42-= 根据静平衡条件 02211=++b b r m r m r mmm kg r m r m r m b b b ⋅=︒-︒-=52.32210cos 135cos cos 2211θmm kg r m r m r m b b b ⋅=︒-︒-=08.104210sin 135sin sin 2211θmm kg r m r m r m b b b b b b b b ⋅=+=04.109)cos ()sin (22θθ由mm r b 200= kg m b 54.0=∴ mm b m d b2.424==γπ 在位置b θ相反方向挖一通孔︒=︒+︒=︒+⎪⎪⎭⎫⎝⎛=︒+-66.28218066.72180cos sin 1801b b b bb b b r m r m tg θθθ解法二:由质径积矢量方程式,取 mmmmkg W ⋅=2μ 作质径积矢量多边形如图6-5(b ) 平衡孔质量 kg r W m bbW b 54.0==μ 量得 ︒=6.72b θ题6-7在图示的转子中,已知各偏心质量m 1=10kg ,m 2=15kg ,m 3=20kg ,m 4=10kg ,它们的回转半径分别为r 1=40cm ,r 2=r 4=30cm ,r 3=20cm ,又知各偏心质量所在的回转平面的距离为l 12=l 23=l 34=30cm ,各偏心质量的方位角如图。
若置于平衡基面Ⅰ及Ⅱ中的平衡质量m b Ⅰ及m b Ⅱ的回转半径均为50cm ,试求m b Ⅰ及m b Ⅱ的大小和方位。
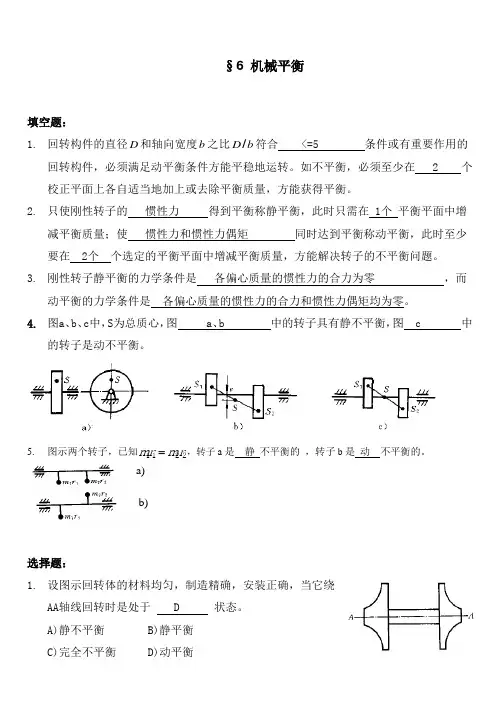
§6 机械平衡填空题:1.回转构件的直径D和轴向宽度b之比/D b符合 <=5 条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。
如不平衡,必须至少在 2 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
2.只使刚性转子的惯性力得到平衡称静平衡,此时只需在 1个平衡平面中增减平衡质量;使惯性力和惯性力偶矩同时达到平衡称动平衡,此时至少要在 2个个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
3.刚性转子静平衡的力学条件是各偏心质量的惯性力的合力为零,而动平衡的力学条件是各偏心质量的惯性力的合力和惯性力偶矩均为零。
4.图a、b、c中,S为总质心,图 a、b 中的转子具有静不平衡,图 c 中的转子是动不平衡。
,转子a是静不平衡的,转子b是动不平衡的。
5.图示两个转子,已知mr mr1122a)b)选择题:1.设图示回转体的材料均匀,制造精确,安装正确,当它绕AA轴线回转时是处于 D 状态。
A)静不平衡B)静平衡C)完全不平衡D)动平衡2. 图示为一圆柱凸轮。
设该凸轮的材料均匀,制造精确,安装正确,则当它绕AA 轴线转动时,是处于 B 状态。
A)静不平衡B)静平衡 C)完全不平衡D)动平衡3. 图示一变直径带轮。
设该带轮的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 D 状态。
A)静不平衡B)静平衡 C)完全不平衡 D)动平衡判断题:1. 若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。
(√ )2. 不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
(√ ) 综合题1:图示为绕O 点回转的薄片圆盘,在位置1、2处钻孔,101m .r =,202m .r =,孔部分材料质量分别为110kg .m =,205kg .m =。
为进行静平衡,欲在半径05m .b r =的圆周上钻一孔。

第五章机械的平衡内容提要本章主要解决机械的动平衡和静平衡问题,学会用平衡基面法消除机械系统的动平衡。
本章主要内容是:1.掌握机械平衡的一些基本概念,如静平衡、动平衡等;2.掌握转子进行静平衡的条件、方法和步骤,并可根据实际转子进行静平衡实验,确定转子的静不平衡量的大小和位置;3.掌握转子进行动平衡的条件、方法和步骤,并可根据实际转子进行动平衡实验,确定转子的动不平衡量的大小和位置;4.掌握平面机构的平衡方法;5.了解空间机构的平衡方法;本章重点是刚性转子的静平衡、动平衡的原理及计算方法。
本章难点是转子动平衡和平面机构平衡的原理和计算方法。
要点分析机械在运转时,构件所产生的惯性力和惯性力矩在运动副上引起了大小和方向不断变化的动压力,这种动压力不仅会降低机械效率,影响机械的使用寿命,而且引起机械及其基础产生强迫振动以及可能产生的其它不良现象。
机械平衡的目的就是尽可能消除或减少惯性力对机械系统的不良影响,借助于增减校正质量或者改变机械系统的质量分布将不平衡惯性力和惯性力矩加以消除或减少。
尤其是对于高速运转的机械,如果惯性力引起的振动频率等于机械的固有频率时,将导致共振现象,这将对机械造成破坏,对操作者带来不安全因素。
由于构件的运动形式不同,所产生的惯性力的平衡方法也不同。
对于绕固定轴转动的回转构件(即转子),可以就其本身加以平衡;对于作往复移动或平面运动的构件,必须就整个机构进行平衡。
所以,机械的平衡问题分为转子的平衡和机构的平衡两类。
根据转子的工作状态和力学特性,从平衡的观点出发,常把转子分成两类:刚性转子和挠性转子。
一般来说,凡是工作转速远低于转子的一阶弯曲临界转速的转子视为刚性转子;而把工作转速接近或超过转子的一阶弯曲临界转速的转子视为挠性转子。
在国际标准化组织制定的"平衡词汇"标准ISO1925-1981和我国"试验机名词术语"ZBY033-82中,刚性转子被更确切地定义为"可以在一个或任意选定的两个校正平面上,以低于转子工作转速的任意转速进行平衡校正,且校正之后,在最高工作转速及低于工作转速的任意转速和接近实际的工作条件下,其不平衡量均不明显地超过所规定的平衡要求"的转子。
第6章机械的平衡6.1 复习笔记一、机械平衡的目的及内容1.机械平衡的目的(1)设法将构件的不平衡惯性力加以平衡以消除或减小其不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需考虑如何合理利用不平衡惯性力的问题。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡绕固定轴回转的构件统称为转子,分为刚性转子和挠性转子。
①刚性转子的平衡a.刚性转子的定义在工作过程中产生的弹性形变甚小的转子称为刚性转子。
b.特点第一,刚性较好,共振转速较高;第二,工作转速低于(0.6~0.75)n c1(n c1为转子的第一阶临界转速)。
c.平衡理论刚性转子的平衡按理论力学中的力系平衡来进行。
d.转子的静平衡和动平衡第一,转子的静平衡只要求其惯性力平衡,称为转子的静平衡;第二,转子的动平衡同时要求其惯性力和惯性力矩平衡,称为转子的动平衡。
②挠性转子的平衡a.挠性转子的定义在工作过程中产生较大的弯曲变形,使其惯性力显著增大的转子称为挠性转子。
b.特点第一,质量和跨度很大;第二,径向尺寸较小,共振转速较低;第三,工作转速n很高(n≥(0.6~0.75)n c1)。
c.平衡理论挠性转子的平衡原理是基于弹性梁的横向振动理论。
(2)机构的平衡作往复移动或平面复合运动的构件,其所产生的惯性力无法在该构件本身上平衡,必须研究整个机构使各运动构件惯性力的合力和合力偶得到完全或部分平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算1.刚性转子的静平衡计算(1)静不平衡①定义 由于质心不在回转轴心上而使转子在静态时表现出来的不平衡现象称为静不平衡。
②特点a .对象为转子轴向宽度b 与其直径D 之比b/D <0.2的转子;b .转子的质心不在回转轴线上,当其转动时,偏心质量就会产生离心惯性力。
(2)静平衡的计算如图6-1-1所示为一盘状转子,已知其具有偏心质量m 1、m 2,各自的回转半径为r 1、r 2,转子角速度为ω。