机械制造习题集答案
- 格式:pdf
- 大小:880.16 KB
- 文档页数:16
第一章制图的基本知识和技能班级姓名学号日期
第一章制图的基本知识和技能班级姓名学号日期
第一章制图的基本知识和技能班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章 正投影法的基本原理 班级 姓名
学号 日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第四章变换投影面法班级姓名学号日期
第四章变换投影面法班级姓名学号日期
第四章变换投影面法班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期。
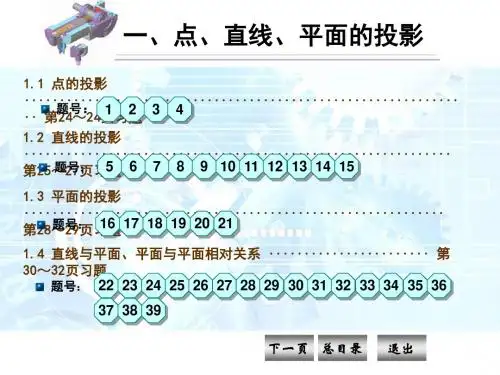
一、点、直线、平面的投影1.1 点的投影∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第24~24页习题1.2 直线的投影∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第25~27页习题1.3 平面的投影∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第28~29页习题1.4 直线与平面、平面与平面相对关系∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第30~32页习题1234题号:题号:56789101112131415题号:161718192021题号:2223242526272829303132333435363738391.5 换面法∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第33~35页习题1.6 旋转法∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第36~36页习题1.7 投影变换综合题∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙第37~37页习题点、直线、平面的投影题号:404142434445464748495051题号:525354555657题号:58596061621. 已知A、B、C三点的直观图,画出它们的投影图,并将各点的坐标值填入表中。
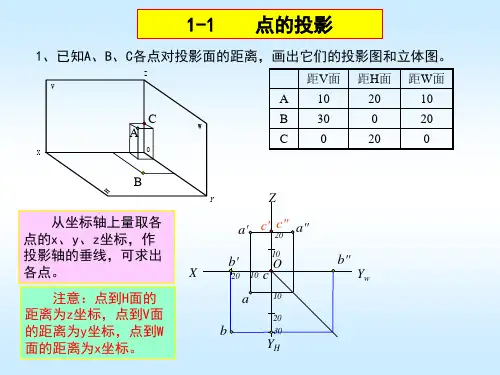
2. 已知A、B、C各点对投影面的距离,画出它们的三面投影图和直观图。
3. 已知点A的坐标(40,15,0),画出其三面投影并作出点B和点C的三面投影。
(a)点B ——在点A右面20mm,前面15mm,上面20mm;(b)点C ——在点A左面10mm,后面15mm,上面15mm。
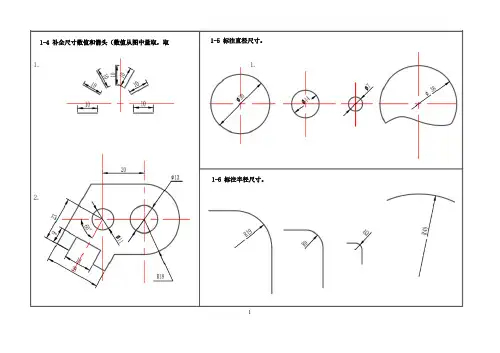
11-6 标注半径尺寸。
1-5 标注直径尺寸。
1-4 补全尺寸数值和箭头(数值从图中量取,取1-7 补画箭头并填写线性尺寸和角度尺寸数字(量取整数)。
1-8 根据尺寸注法的规定,标注各图形的尺寸(量取整数)。
2模块二投影基础2-1根据立体轴测图及其在三投影面体系中所处的位置,画出它的三视图并回答问题。
123452-6 已知A(25,10,20) 、B(10,20,10)两点坐标,求2-7已知点的二面投影,求其第三面投影。
作两点的三面投影,并判断两点的相对位置。
62-8 填空2-9 根据A、B两点的直观图作出其三面投影图(尺寸从图中量取)。
2-10已知点A、B的一面投影,又知点A距H面15mm,点B 在V面上,试分别求作A、B另两面投影。
2-11已知点B在点A的正左方15mm;点C是点A对V面的重影点(c'不可见),且距点A为10mm。
补全点A的侧面投影,求做其他各点的三面投影,并判别可见性。
72-12 已知A、B两点的两面投影,求做第三面投影并判断A、B两点的相互位置。
2-14 在三视图中标出A、B、C三点的三面投影。
2-13 判断A、B二点的相互位置。
2-15 已知三棱锥底面的三面投影和顶点S的坐标为(20,13,20),完成三棱锥的三面投影图。
892-17 已知线段两端点A(25,10,5)、B(5,20,25),画出其三面投影,并求4B实长及其对H的倾角α及V面夹角2-18 已知线段AB的投影ab及a '和对V面的倾角β=30°,画出其三面投影图。
2-20 在线段AB上取一点K,使AK=15mm,求K的两面投影。
2-19已知线段AB的V面投影α 'b‘及a,又知B在A的后方,AB实长为26,画出其水平投影图。
10111213142-28 在立体图中标出端点A 、B 、C 、D 的位置(立体图中用大写字母标出),并填写线段AB 、CD 的名称,及其对各投影面的相对位置。
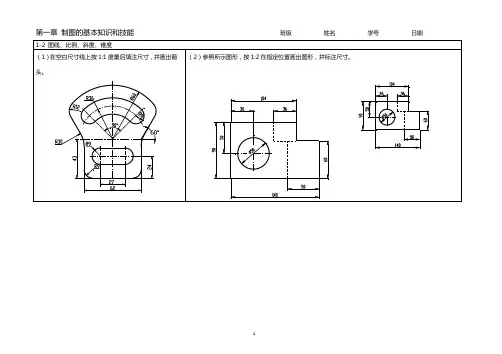
《机械制图》(第六版)习题集答案第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。
第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。
●注意多边形的底边都是水平线;要规范画对称轴线。
●正五边形的画法:①求作水平半径ON的中点M;②以M为圆心,MA为半径作弧,交水平中心线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E④连接五个顶点即为所求正五边形。
2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四心圆法画椭圆的方法做题。
注意椭圆的对称轴线要规范画。
3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。
第6页点的投影1、按立体图作诸点的两面投影。
●根据点的两面投影的投影规律做题。
2、已知点A在V面之前36,点B在H面之上,点D在H面上,点E在投影轴上,补全诸的两面投影。
●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
3、按立体图作诸点的两面投影。
●根据点的三面投影的投影规律做题。
4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C 在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的3.5倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
各点坐标为:A(25,15,20)B(20,10,15)C(35,30,32)D(42,12,12)5、按照立体图作诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。
(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。

《机械制图》(第六版)习题集答案第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。
第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。
●注意多边形的底边都是水平线;要规范画对称轴线。
●正五边形的画法:①求作水平半径ON的中点M;②以M为圆心,MA为半径作弧,交水平中心线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E④连接五个顶点即为所求正五边形。
2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四心圆法画椭圆的方法做题。
注意椭圆的对称轴线要规范画。
3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。
第6页点的投影1、按立体图作诸点的两面投影。
●根据点的两面投影的投影规律做题。
2、已知点A在V面之前36,点B在H面之上,点D在H面上,点E在投影轴上,补全诸的两面投影。
●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
3、按立体图作诸点的两面投影。
●根据点的三面投影的投影规律做题。
4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
各点坐标为:A(25,15,20)B(20,10,15)C(35,30,32)D(42,12,12)5、按照立体图作诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。
(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。
机械制图习题集答案第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。
第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。
●注意多边形的底边都是水平线;要规范画对称轴线。
●正五边形的画法:①求作水平半径ON的中点M;②以M为圆心,MA为半径作弧,交水平中心线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E④连接五个顶点即为所求正五边形。
2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四心圆法画椭圆的方法做题。
注意椭圆的对称轴线要规范画。
3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。
第6页点的投影1、按立体图作诸点的两面投影。
●根据点的两面投影的投影规律做题。
2、已知点A在V面之前36,点B在H面之上,点D在H面上,点E在投影轴上,补全诸的两面投影。
●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
3、按立体图作诸点的两面投影。
●根据点的三面投影的投影规律做题。
4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的3.5倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
各点坐标为:A(25,15,20)B(20,10,15)C(35,30,32)D(42,12,12)5、按照立体图作诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。
(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。
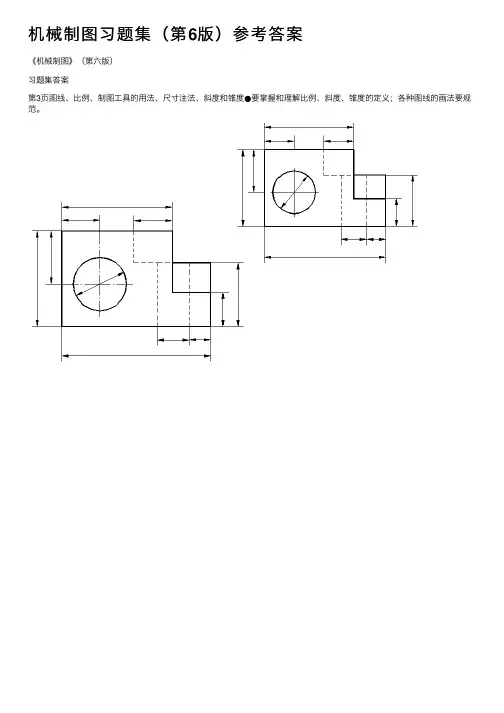
机械制图习题集(第6版)参考答案《机械制图》(第六版)习题集答案第3页图线、⽐例、制图⼯具的⽤法、尺⼨注法、斜度和锥度●要掌握和理解⽐例、斜度、锥度的定义;各种图线的画法要规范。
第4页椭圆画法、曲线板⽤法、平⾯图形的尺⼨注法、圆弧连接1、已知正六边形和正五边形的外接圆,试⽤⼏何作图⽅法作出正六边形,⽤试分法作出正五边形,它们的底边都是⽔平线。
●注意多边形的底边都是⽔平线;要规范画对称轴线。
●正五边形的画法:①求作⽔平半径ON的中点M;②以M为圆⼼,MA为半径作弧,交⽔平中⼼线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E④连接五个顶点即为所求正五边形。
2、⽤四⼼圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四⼼圆法画椭圆的⽅法做题。
注意椭圆的对称轴线要规范画。
3~4、在平⾯图形上按1:1度量后,标注尺⼨(取整数)。
5、参照左下⽅所⽰图形的尺⼨,按1:1在指定位置处画全图形。
第6页点的投影1、按⽴体图作诸点的两⾯投影。
●根据点的两⾯投影的投影规律做题。
2、已知点A在V⾯之前36,点B在H⾯之上,点D在H⾯上,点E在投影轴上,补全诸的两⾯投影。
●根据点的两⾯投影的投影规律、空间点的直⾓坐标与其三个投影的关系及两点的相对位置做3、按⽴体图作诸点的两⾯投影。
●根据点的三⾯投影的投影规律做题。
4、作出诸点的三⾯投影:点A(25,15,20);点B距离投影⾯W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影⾯V、H等距离,与投影⾯W的距离是与H⾯距离的3.5倍。
●根据点的投影规律、空间点的直⾓坐标与其三个投影的关系及两点的相对位置做题。
各点坐标为:A(25,15,20)B(20,10,15)C(35,30,32)D(42,12,12)5、按照⽴体图作诸点的三⾯投影,并表明可见性。
●根据点的三⾯投影的投影规律做题,利⽤坐标差进⾏可见性的判断。
机械识图习题集第一章制图的基本知识和技能1.图纸的幅面按尺寸大小可分为 5 种,其代号分别为 A0,A1,A2,A3,A4。
2.图纸格式分为留有装订边和不留装订边两种,按照标题栏的方位又可将图纸格式分为X型和Y型两种。
3.标题栏应位于图纸的右下角,一般包含以下四个区:更改区、签字区、名称及代号区、其他区,标题栏中的文字方向为水平。
4.比例是指图中图形与其实物相应要素的线性尺寸之比。
图样上标注的尺寸应是机件的最后完工尺寸尺寸,与所采用的比例无关。
5.常用比例有原值比例、放大比例和缩小比例三种;比例1:2是指实物是图形的2倍,属于缩小比例;比例2:1是指图形是实物的2倍,属于放大比例。
6.比例的选择原则是:作图时应尽量采用原则比例,需要时也可采用放大或缩小的比例。
无论采用何种比例,图样中所注的尺寸,均为机件的最后完工尺寸。
7.图样中书写的汉字、数字和字母,必须做到字体工整、笔划清除、间隔均匀、排列整齐,汉字应用长仿宋体书写,数字和字母应书写为斜体或直体。
8.字号指字体的高度,图样中常用字号有3.5,5,7,10号四种。
9.常用图线的种类有粗实线、细实线、波浪线、细虚线、细点画线、双点画线等六种。
10.图样中,机件的可见轮廓线用粗实线画出,不可见轮廓线用细虚线画出,尺寸线和尺寸界线用细实线画出,对称中心线和轴线用细点画线画出。
虚线、细实线和细点划线的图线宽度约为粗实线的一半。
11.图样上的尺寸是零件的最后完工尺寸,尺寸以mm为单位时,不需标注代号或名称。
12.标注尺寸的四要素是尺寸界线、尺寸线、箭头、尺寸数字。
13.尺寸标注中的符号:R表示半径,φ表示直径,Sφ表示球面直径,SR表示球面半径,S表示斜度,C表示锥度。
14.标注水平尺寸时,尺寸数字的字头方向应朝上;标注垂直尺寸时,尺寸数字的字头方向应朝左。
角度的尺寸数字一律按水平位置书写。
当任何图线穿过尺寸数字时都必须断开。
15.斜度是指一直线(或平面)对一直线(或平面)的倾斜程度,写成 1:n 形式,用符号 S 表示。
第二章机床夹具设计
10.根据六点定位原理分析图2—2中各定位方案中各个定位元件所消除的自由度。
11.图2—4为镗削连杆小头孔工序定位简图。
定位时在连杆小头孔插入削边定位插销,夹紧后,拔出削边定位插销,就可进行镗削小孔。
试分析各个定位元件所消除的自由度。
12.图2—5为滚齿时齿坯的定位和所用的夹具的简图。
根据六点定位原理,试分析各个定位元件所消除的自由度。
如果属于欠定位或过定位,请指出可能出现什么不良后果,并提出改进方案。
如果属于过定位或欠定位,请指出可能出现什么不良后果,并提出改进方案。
14.图2—7分别为连杆及圆盘铸件中孔加工的定位方案。
铸件两端面均已加工过,其余表面未加工。
试分析各定位方案中,各个定位元件所消除的自由度。
如果居于过定位或欠定位.请指出可能出现什么不良后果,并提出改进方案。
15.
16.
17.分析图2—49、图2—50各夹紧方案是否合理?若有不合理之处、则应如何改进?
18.工件定位如图2.10示。
欲钻孔O 并保证尺寸A ,试分析计算此种定位方案的定位误差。
图2.
10
19.为保证下列图中加工尺寸,试分析应限制的自由度。
对图(a ):应限制的自由度为:z 轴的移动方向 对图(b ):应限制:x 轴,z 轴方向的移动,绕x 轴.y 轴.z 轴的转动
对图(a ):应限制的自由度:X 、Z 移动,X 、Z 转动 对图(b ):应限制的自由度:X 、Y 、Z 移动
20.试分析下列图中定位方式的定位误差。
(求εDH )
对图〈 a 〉定位误差ε
DH =
βα
δSin Sin
D
2
2 对图〈 b 〉定位误差ε
DH =
δD /2
对图〈 a 〉ε
DH
=
2D δ (1/sin 2
α
-1) 对图〈 b 〉定位误差εDH =δD /2 21.根据六点定位原则,试分析下图所示各定位元件所消除的自由度。
答:削边销X 圆柱销Y Z 支承钉Z X Y
22.如下图所示,一批工件以孔φ20021
.00+mm
在心轴φ20007
.0020.0--mm
上定位,在立式铣床上
用顶针顶住心轴铣键糟。
其中φ
40h60
016.0-外圆、φ20H7021
00。
+内孔及两端面均已加工合格。
而且φ40h6外圆对φ20H7内孔的径向跳动在0.02㎜之内。
今要保证铣糟的主要技术要求为:
(1)槽宽b=12h90
048.0-
(2)槽距一端面尺寸为20h120
21.0-
(3)槽底位置尺寸为
34.8h120
16.0-
(4)槽两侧面对外圆轴线的对称度不大于0.10㎜。
试分析其定位误差对保证各项技术要求的影响。
B B
〔解〕(1)由铣刀的相应尺寸保证。
(2)ΔD =0
(3)ΔD=0.069
(4)ΔD=0.042
23.有一批套类零件,如下图所示。
欲在其上铣一键糟,试分析计算各种定位方案中:H1、H2、H3的定位误差。
(1)在可涨心轴上定位(b)。
(2)在处于水平位置的刚性心轴上具有间隙的定位。
定位心轴直径为d Bsd
Bxd(见图
c)。
(3)在处于垂直位置的刚性心轴上具有间隙定位。
定位心轴直径为d Bsd Bxd
(4)如果计及工件内外圆同轴度为t,上述三种定位方案中,H1、H2、H3的定位
c)
〔解〕(1)ΔDh1=δd/2,ΔDh2=δd/2,ΔDh3=0
(2)ΔDh1=δd/2+δD+X min,ΔDh2=δd/2+δD+X min,ΔDh3=δD+X min
(3)单边接触
ΔDh1=δd/2+(δD+X min )/2,ΔDh2=δd/2+(δD+X min)/2,ΔDh3=(δD+X min)/2
任意边接触
ΔDh1=δd/2+δD+X min,ΔDh2=δd/2+δD+X min,ΔDh3=δD+X min
24.工件尺寸如题图4-5a所示,欲钻O孔并保证尺寸300
1.0mm。
试分析计算图示各种
定位方案的定位误差(加工时工件轴线处于水平位置),a 均为900。
a)
c) d)
〔解〕(b)ΔD=0.045 (c)ΔD=0.039(d)ΔD=0.039(e)ΔD=0.035(f)ΔD=0.07
25.选择题
1)用(b)来限制六个自由度,称为(c)。
根据加工要求,只需要少于(b)的定位,称为(d)定位。
a.六个支承点;b.具有独立定位作用的六个支承点;c.完全;d.不完全;f.欠定位2)只有在(b)精度很高时,过定位才允许采用,且有利于增强工件的(d)。
a.设计基准面和定位元件;b.定位基准面和定位元件;c.夹紧机构;d.刚度;e.强度
3)定位元件的材料一般选(adf)
a.20钢渗碳淬火;
b.铸铁; c.中碳钢; d.中碳钢淬火; e.合金钢; f. TA钢4)自位支承(浮动支承)其作用增加与工件接触的支承点数目,但(b)
a.不起定位作用;b.一般来说点限制一个自由度;c.不管如何浮动必定只能限制一个自由度
5)工件装夹中由于(a)基准和(e)基准不重合而产生的加工误差,称为基准不符误差a.设计(或工序);b.工艺;c.测量;d.装配;e.定位
6)基准不符误差大小与(b)有关。
a.本道工序要保证的尺寸大小和技术要求;b.只与本道工序设计〔或工序〕基准与定位基准之间位置误差;c.定位元件和定位基准本身的制造误差。
7)在简单夹紧机构中(e)夹紧机构一般不考虑自锁;(d)夹紧机构既可增力又可减力;(c)夹紧机构实现工件定位作用的同时,并将工件夹紧;(b)夹紧机构行程不受限制。
(ade)夹紧机构能改变夹紧力的方向,(a)夹紧机构夹紧行程与自锁性能有矛盾。
(f)夹紧机构动作迅速,操作简便。
a.斜楔;
b.螺旋;c.定心;d.杠杆;e.铰链;f.偏心
8)偏心轮的偏心量取决于(c)和(e),偏心轮的直径和(a)密切有关。
a.自锁条件;
b.夹紧力大小;
c.工作行程;
d.销轴直径;
e.工作范围;
f.手柄长度
9)在多件夹紧中,由于(e),因此一般采用(c),夹紧才能达到各工件同时被夹紧的目的。
a.多点;b多向;c.浮动;d.动作联动;e.各工件在尺寸上有误差;f.连续式或平行式夹紧。
10)采用连续多件夹紧,工件本身作浮动件,为了防止工件的定位基准位置误差逐个积累,应使(a)与夹紧力方向相垂直。
a.工件加工尺寸的方向;b.定位基准面;c.加工表面;d.夹压面
11)镗模采用双面导向时,镗杆与机床主轴是(b)连接,机床主轴只起(c)作用,镗杆回转中心及镗孔精度由 (d、f)保证。
a.刚性;b.柔性(或浮动);c.传递动力;d. 镗模;e.机床;f.镗杆
12)专用车床夹具的回转轴线与车床主轴轴线的同轴度与(b)有关
a.轴颈精度;b.夹具与主轴联接结构及精度;c.主轴端部与夹具采用螺纹联接的螺纹精度有关。