GPS芯片选型
- 格式:pdf
- 大小:626.35 KB
- 文档页数:20

GPS模块自动接收卫星定位信号来进行定位同时将这些定位信息通过GPRS或CDMA网络实时传送回监控中心。
GPS定位系统原理及工作原理GPS定位系统原理及工作原理GPS:全球卫星定位系统(Global Positioning System,简称GPS)是由美国政府所发展,整个系统约分成下列三个部份:【太空卫星部份】由21颗工作卫星和3颗在轨备用卫星组成GPS卫星星座,记作(21+3)GPS星座。
24颗卫星均匀分布在6个轨道平面内,轨道倾角为55度,各个轨道平面之间相距60度,即轨道的升交点赤经各相差60度。
每个轨道平面内各颗卫星之间的升交角距相差90度,一轨道平面上的卫星比西边相邻轨道平面上的相应卫星超前3 0度。
在两万公里高空的GPS卫星,当地球对恒星来说自转一周时,它们绕地球运行二周,即绕地球一周的时间为12恒星时。
这样,对于地面观测者来说,每天将提前4分钟见到同一颗GPS卫星。
位于地平线以上的卫星颗数随着时间和地点的不同而不同,最少可见到4颗,最多可见到11颗。
在用GPS信号导航定位时,为了结算测站的三维坐标,必须观测4颗GPS卫星,称为定位星座。
这4颗卫星在观测过程中的几何位置分布对定位精度有一定的影响。
对于某地某时,甚至不能测得精确的点位坐标,这种时间段叫做“间隙段”。
但这种时间间隙段是很短暂的,并不影响全球绝大多数地方的全天候、高精度、连续实时的导航定位测量。
GPS工作卫星的编号和试验卫星基本相同。
【地面管制部份】对于导航定位来说,GPS卫星是一动态已知点。
星的位置是依据卫星发射的星历—描述卫星运动及其轨道的的参数算得的。
每颗GPS卫星所播发的星历,是由地面监控系统提供的。
卫星上的各种设备是否正常工作,以及卫星是否一直沿着预定轨道运行,都要由地面设备进行监测和控制。
地面监控系统另一重要作用是保持各颗卫星处于同一时间标准—GPS时间系统。
这就需要地面站监测各颗卫星的时间,求出钟差。
然后由地面注入站发给卫星,卫星再由导航电文发给用户设备。
GPS芯片解决方案(转)2008-11-02 13:03随著科技发展,GPS导航发展态势越来越值得期待,其中又以GPS芯片核心技术发展最值得我们关心。
在GPS芯片发展的过程中,「小型化」一直是重要发展方向,这使得GPS芯片组在降低耗电量、缩小体积等方面的技术更跨前一步,不论是车载或手持式GPS全球卫星定位系统,皆能提供详尽而准确的定位信息及交通信息,可轻松实现GPS卫星导航功能。
近几年,由于芯片厂商增加,并提供完整性的解决方案,模块厂商更容易开发出整合型产品,因此大量厂商投入接收器产品生产,所以在接收器与模块产品方面供应不虞匮乏,这不仅对GPS热潮起了推波助澜效果,也使GPS整机成本最高的GPS芯片组成本价格下滑,而提供消费性电子产品使用的GPS芯片,也已开始在市场上显露身影,加上芯片厂商逐渐改良效能,因此,芯片定位能力也已逐渐拉近。
在此趋势下,GPS芯片产品如何争取到买家的肯定,便成为各家GPS芯片在市场上相互竞争的关键因素。
谈到GPS芯片主要关键技术,这包括负责讯号处理─基频(Baseband)及接收讯号─射频(RF)。
由于GPS讯号频率(1,575.42MHz)来自于距离地面2万公里的高空,讯号十分不稳定,因此当天线接收讯号后经过一连串讯号放大、过滤杂讯、降频、取样等过程(RF front end),再经过RF后,讯号进入基频处理部分,将前段取样的数码讯号经过运算、输出以便于使用者界面使用,其中 GPS Baseband DSP芯片就是核心元件,负责位址讯号的处理。
综合以上来看,射频与基频2个部分,包含:微处理器(Microprocessor)、低杂讯放大器(Low Noise Amplifier;LNA)、数码部分(Digital Section)射频部份(RF Section)、天线(Antenna Element)、输出入驱动器(GPIO and Drivers),以及微处理器周边电路(Processor peripherals)等几个重要元件。

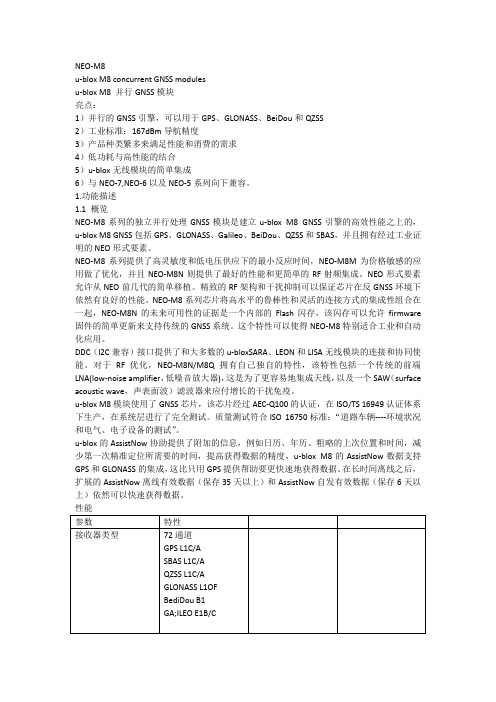
NEO-M8u-blox M8 concurrent GNSS modulesu-blox M8 并行GNSS模块亮点:1)并行的GNSS引擎,可以用于GPS、GLONASS、BeiDou和QZSS2)工业标准:167dBm导航精度3)产品种类繁多来满足性能和消费的需求4)低功耗与高性能的结合5)u-blox无线模块的简单集成6)与NEO-7,NEO-6以及NEO-5系列向下兼容。
1.功能描述1.1 概览NEO-M8系列的独立并行处理GNSS模块是建立u-blox M8 GNSS引擎的高效性能之上的,u-blox M8 GNSS包括GPS、GLONASS、Galileo、BeiDou、QZSS和SBAS,并且拥有经过工业证明的NEO形式要素。
NEO-M8系列提供了高灵敏度和低电压供应下的最小反应时间,NEO-M8M为价格敏感的应用做了优化,并且NEO-M8N则提供了最好的性能和更简单的RF射频集成。
NEO形式要素允许从NEO前几代的简单移植。
精致的RF架构和干扰抑制可以保证芯片在反GNSS环境下依然有良好的性能。
NEO-M8系列芯片将高水平的鲁棒性和灵活的连接方式的集成性组合在一起,NEO-M8N的未来可用性的证据是一个内部的Flash闪存,该闪存可以允许firmware 固件的简单更新来支持传统的GNSS系统。
这个特性可以使得NEO-M8特别适合工业和自动化应用。
DDC(I2C兼容)接口提供了和大多数的u-bloxSARA、LEON和LISA无线模块的连接和协同使能。
对于RF优化,NEO-M8N/M8Q拥有自己独自的特性,该特性包括一个传统的前端LNA(low-noise amplifier,低噪音放大器),这是为了更容易地集成天线,以及一个SAW(surface acoustic wave,声表面波)滤波器来应付增长的干扰免疫。
u-blox M8模块使用了GNSS芯片,该芯片经过AEC-Q100的认证,在ISO/TS 16949认证体系下生产,在系统层进行了完全测试。

主控芯片选型标准
在选择主控芯片时,需要考虑以下几个方面:
1. 性能:芯片的性能是选型的重要因素,需要根据应用场景的需求选择合适的性能水平。
包括处理器速度、内存大小、存储容量等。
2. 功能:根据应用场景的需求,选择具有相应功能的主控芯片。
例如,如果需要支持蓝牙、Wi-Fi、GPS 等功能,则需要选择支持这些功能的芯片。
3. 功耗:对于移动设备等需要考虑电池寿命的应用,功耗是一个重要的因素。
需要选择功耗低的芯片,以延长电池寿命。
4. 成本:芯片的成本也是选型的重要因素之一。
需要根据项目预算选择合适的芯片,同时也要考虑到长期的成本效益。
5. 开发工具和支持:选择具有良好开发工具和支持的主控芯片可以提高开发效率和降低开发成本。
需要考虑芯片厂商提供的开发工具、文档、技术支持等。
6. 兼容性:如果需要与其他设备或系统进行交互,需要选择具有良好兼容性的主控芯片。
7. 供货情况:需要考虑芯片的供货情况,以确保项目能够按时完成。
在选择主控芯片时,需要综合考虑以上因素,并根据具体应用场景的需求进行权衡和选择。

千寻位置gps参数
千寻位置是一家提供定位服务的公司,其主要产品是GPS芯片和定位模块。
千寻位置的GPS芯片和定位模块具有高精度、低功耗、小尺寸等特点,广泛应用于智能手表、智能家居、智能交通等领域。
千寻位置的GPS芯片和定位模块主要参数包括以下几个方面:
1. 定位精度:千寻位置的GPS芯片和定位模块的定位精度可以达到米级甚至亚米级,可以满足大多数应用场景的需求。
2. 芯片尺寸:千寻位置的GPS芯片和定位模块尺寸小,可以满足各种小型设备的需求。
3. 功耗:千寻位置的GPS芯片和定位模块功耗低,可以延长设备的使用时间。
4. 支持的卫星系统:千寻位置的GPS芯片和定位模块支持GPS、GLONASS、BeiDou等多个卫星系统,可以提高定位的可靠性和精度。
5. 接口类型:千寻位置的GPS芯片和定位模块支持多种接口类型,包括UART、SPI、I2C等,可以方便地与各种主控芯片进行通信。
6. 工作温度范围:千寻位置的GPS芯片和定位模块工作温度范围广,可以适应各种环境下的使用。
总的来说,千寻位置的GPS芯片和定位模块具有高精度、低功耗、小尺寸等优点,可以满足各种应用场景的需求。
在未来,随着物联网和
智能化的发展,千寻位置的GPS芯片和定位模块将会有更广泛的应用。
概述
H6203是支持宽电压输入的开关降压型DC-DC的控制器。
内置150V-9A的高压mos。
宽输入电压范围:8V-120V。
输出电压范围:5V-30V可调,支持输出12V/1A,5V/1.5A。
同时支持输出恒压和输出恒流功能。
通过设置CS电阻可设置输出过流值(恒流值)。
通过设置FB1、FB2引脚的分压电阻可设置输出电压值(恒压值)。
采用固定频率的PWM控制方式,惠海半导体H6203典型开关频率140Khz。
轻载时会自动降低开关频率以获得高的转换效率。
具有软启动,过温保护电路,输出短路保护及限流保护等功能,系统可靠性高。
具有低待机功耗、高效率、低纹波、优异的母线电压调整率和负载调整率等优势。
应用
电动车车充、仪器仪表
手机充电器
电动汽车、电动自行车、电瓶车led照明
GPS定位器电源供电
车载电子设备
MCU供电
典型应用电路图。
gps核心芯片介绍(Introduction of GPS core chip)GPS home novice manual GPS core chip introduced to buy GPS on the selected chipThe performance difference of different GPS products mainly depends on the core chip. The technical indicators that you see when you purchase GPS are determined by the GPS chip, and the future development of GPS is also determined by the core chip technology.The performance of GPS receiver is affected by antenna technology to a great extent, but the antenna is very different, and the user only needs to know the type of antenna technology. GPS antenna mainly consists of spiral antenna and flat antenna. The former direction is not strong, but the gain is relatively small; the latter has a strong directional, but the gain is also strong, suitable for flat place in a fixed place. Of course, the size of the antenna is better, some products can be equipped with an external high gain antenna, this antenna is widely used in spiral antenna, because external antenna size increases, the gain is not a problem, more sensitive to the direction of. Note: most GPS do not need an external GPS antenna at presentLet's get down to business.Development and Prospect of 1.GPS chipAfter 2003, the GPS chip industry has sprung up a booming situation. At present, the design and production of GPS chip manufacturers more than 10, including the United States SiRF (Se Fu), Garmin (Gaoming), Motorola, SONY, Fujitsu, PHILPS,Nemerix, uNav, uBlox and so on.In 2005, SiRF acquired Motorola's GPS chip business, and will cooperate to integrate GPS functionality in Motorola's smartphones. Coincidentally, Qualcomm Corp also designed integrated GPS functions in the enhanced 3G mobile phone chip CDMA2000 EV-DO. Nextel is also using SiRF technology to implement the GPS function in its mobile phone.The United States has passed laws that require mobile phone manufacturers to integrate GPS receivers into products in 2007 to provide location and emergency call capabilities, and 2007 is the 3G era. Visible, although now integrated GPS function of the phone has not yet entered the mainstream market, but in the future 3G mobile phones in high-end models will be generally integrated GPS function.In July 2005, Dr. Zhou Wenyi returned as the core of the 5 Overseas Students Pioneer Xi'an Xun company also launched the first GPS chip.Although the manufacturers are numerous, at present, in the non independent GPS field, the status of SiRF is like the Intel in the PC industry, and the mainstream products are almost all using SiRF chips. Therefore, readers can understand the core technical differences of non independent GPS as long as they understand the main models of SiRF chips.In addition, Garmin occupies half of the independent GPS equipment market, mainly using Garmin's own chip products. Garmin is much like IBM in the IT field, from map software toGPS devices, to core chips, a vertically integrated company. In some non independent GPS domains, Garmin also uses SiRF chips.The emerging GPS chip companies almost in the original market are difficult to have a place to live in, they'll look at various IT devices in the future integration of GPS, such as mobile phone, digital camera, PDA, notebook computer, or U disk.If integrated with the computing device, many functions of the GPS chip can be completed by software, and the cost can be further reduced. As early as 2004, SiRF company has launched such a simplified product? Software GPS. Recently, PHILPS has released similar products, which can support ARM processor, Xscale processor, x86 processor, complete various GPS processing tasks. Integrated software GPS costs only $4~5.2. mainstream GPS chipGPS chip is mainly composed of three parts: RF circuit, software (Firmware) and memory, processor.Since the laptop is mainly non independent GPS, we will focus on the SiRF chip products.(1) SiRFstar IIISiRF chips released the latest third generation chip SiRFstar III (GSW 3.) in 20040/3.1) makes the civil GPS chip have a peak in performance, andthe sensitivity is much higher than that of the previous products. This chip improves sensitivity by adopting 200 thousand times / frequency correlator (Correlators). The time of cold start / warm start / hot boot is 42s/38s/8s, and 20 satellite channels can be tracked simultaneously. The latest non independent GPS receiver introduced in 2005 is based on this chip.We strongly recommend that users buy products equipped with this chip. Some of the products on this chip are as follows:- Fortuna SlimGPS - Bluetooth- Globalsat BR-355 USB- Globalsat BT-338- Bluetooth- Globalsat SD-502 SDIO- Guidetek GS-R238 (Holux sub brand) - Bluetooth +USB- Haicom 303iii CF- Haicom 305iii CF- Haicom BT405iii - Bluetooth- Holux GR-213 USB- Holux GPSlim 236 - Bluetooth +USB- Leadtek 9553/L/X - Bluetooth- Leadtek 9825 - Bluetooth- Royaltek RBT-2001- Bluetooth(2) SiRFstar II E and SiRFstar II e/LPSiRFstar II e is the first high performance GPS chip, released in 2002. SiRFstar II e/LP (GSW2.3) is a low-power version of SiRFstar II E. Both of them use 1920 times / frequency correlator, and the time of cold boot / warm start / hot boot is 45s/35s/8s, which can track 12 satellite channels simultaneously. It should be said that the 2 chip indicators have been able to meet the needs of daily applications, from 2003 to 2004 launched non independent GPS products using a large number of these 2 chips.At present, some of the products using this chip are as follows:- Fortuna ClipOn Bluetooth- Fortuna PocketXtrack CF- Globalsat BR-305 (Sems***** iTrek)- Globalsat BT-308 (Dell/HP) Bluetooth- Haicom HI303MMF CF- Holux GM210 USB- Holux GR230 - Bluetooth- Royaltek RBT-1000 Bluetooth- Royaltek RBT-3000 - Bluetooth(3) SiRF XT2 and XtracSiRF XT2 chip adds software called Xtrac function based on SiRFstar II e/LP, to enhance the localization ability through satellite signal tracking analysis is weak, have certain effect in indoor, car and other weak places.In the case of weak signal, Xtrac can enhance the positioning ability of GPS. However, Xtrac sometimes causes the increase of positioning error because of the judgment of weak signal fault, and even leads to the positioning information error, which is obvious in high speed driving.In a word, Xtrac is a technology that has both advantages and disadvantages. It is neither as powerful as SiRF's propaganda, nor will it cause many problems.At present, some of the products using this chip are as follows:- Fortuna ClipOn Bluetooth- Globalsat SD-501 - SDIO- Haicom HI303S - CF- Holux GR231 - Bluetooth- Holux GM270U CF- Royaltek RBT-1000 V2 - BluetoothAt present, SiRF company announced the launch of SiRFPrima latest navigation chipThis chip can be used either by GPS satellite positioning or by Galileo positioning system. In addition to the positioning function, SiRFPrima also provides audio and video playback functions. SiRFPrima chips can handle high resolution 3D images and support WinCE and Linux platforms.Fortunately, recently, China has also successfully developed China Navigation Satellite chip "navigation No. 1""It is understood that the "pilot 1" chip is by Shanghai re control Hualong Microsystem Technology Co., Ltd. is responsible for research and development.This chip will replace the "Beidou" system of foreign chips, breaking the monopoly of foreign GPS situation. In performance, the volume of "pilot No.1" is greatly reduced and high performance, but the power consumption is greatly reduced.。
GPS是英文Global Positioning System(全球定位系统)的简称。
GPS起始于1958年美国军方的一个项目,1964年投入使用。
20世纪70年代,美国陆海空三军联合研制了新一代卫星定位系统GPS 。
主要目的是为陆海空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,经过20余年的研究实验,耗资300亿美元,到1994年,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。
在机械领域GPS则有另外一种含义:产品几何技术规范(Geometrical Product Specifications)-简称GPS。
另外一种解释为G/s(GB per s)GPS功能必须具备GPS终端、传输网络和监控平台三个要素;这三个要素缺一不可;通过这三个要素,可以提供车辆定位、防盗、反劫、行驶路线监控及呼叫指挥等功能。
GPS前身GPS系统的前身是美军研制的一种子午仪卫星定位系统(Transit),1958年研制,1964年正式投入使用。
该系统用5到6颗卫星组成的星网工作,每天最多绕过地球13次,并且无法给出高度信息,在定位精度方面也不尽如人意。
然而,子午仪系统使得研发部门对卫星定位取得了初步的经验,并验证了由卫星系统进行定位的可行性,为GPS系统的研制埋下了铺垫。
由于卫星定位显示出在导航方面的巨大优越性及子午仪系统存在对潜艇和舰船导航方面的巨大缺陷。
美国海陆空三军及民用部门都感到迫切需要一种新的卫星导航系统。
为此,美国海军研究实验室(NRL)提出了名为Tinmation的用12到18颗卫星组成10000km 高度的全球定位网计划,并于67年、69年和74年各发射了一颗试验卫星,在这些卫星上初步试验了原子钟计时系统,这是GPS系统精确定位的基础。
而美国空军则提出了621-B 的以每星群4到5颗卫星组成3至4个星群的计划,这些卫星中除1颗采用同步轨道外其余的都使用周期为24h的倾斜轨道,该计划以伪随机码(PRN)为基础传播卫星测距信号,其强大的功能,当信号密度低于环境噪声的1%时也能将其检测出来。
GPS芯片解决方案(转)2008-11-02 13:03随著科技发展,GPS导航发展态势越来越值得期待,其中又以GPS芯片核心技术发展最值得我们关心。
在GPS芯片发展的过程中,「小型化」一直是重要发展方向,这使得GPS芯片组在降低耗电量、缩小体积等方面的技术更跨前一步,不论是车载或手持式GPS全球卫星定位系统,皆能提供详尽而准确的定位信息及交通信息,可轻松实现GPS卫星导航功能。
近几年,由于芯片厂商增加,并提供完整性的解决方案,模块厂商更容易开发出整合型产品,因此大量厂商投入接收器产品生产,所以在接收器与模块产品方面供应不虞匮乏,这不仅对GPS热潮起了推波助澜效果,也使GPS整机成本最高的GPS芯片组成本价格下滑,而提供消费性电子产品使用的GPS芯片,也已开始在市场上显露身影,加上芯片厂商逐渐改良效能,因此,芯片定位能力也已逐渐拉近。
在此趋势下,GPS芯片产品如何争取到买家的肯定,便成为各家GPS芯片在市场上相互竞争的关键因素。
谈到GPS芯片主要关键技术,这包括负责讯号处理─基频(Baseband)及接收讯号─射频(RF)。
由于GPS讯号频率(1,575.42MHz)来自于距离地面2万公里的高空,讯号十分不稳定,因此当天线接收讯号后经过一连串讯号放大、过滤杂讯、降频、取样等过程(RF front end),再经过RF后,讯号进入基频处理部分,将前段取样的数码讯号经过运算、输出以便于使用者界面使用,其中 GPS Baseband DSP芯片就是核心元件,负责位址讯号的处理。
综合以上来看,射频与基频2个部分,包含:微处理器(Microprocessor)、低杂讯放大器(Low Noise Amplifier;LNA)、数码部分(Digital Section)射频部份(RF Section)、天线(Antenna Element)、输出入驱动器(GPIO and Drivers),以及微处理器周边电路(Processor peripherals)等几个重要元件。
GPS模块自动接收卫星定位信号来进行定位同时将这些定位信息通过GPRS或CDMA网络实时传送回监控中心。
GPS定位系统原理及工作原理GPS定位系统原理及工作原理GPS:全球卫星定位系统(Global Positioning System,简称GPS是由美国政府所发展,整个系统约分成下列三个部份:【太空卫星部份】由21颗工作卫星和3颗在轨备用卫星组成GPS卫星星座,记作(21+3)GPS星座。
24颗卫星均匀分布在6个轨道平面内,轨道倾角为55度,各个轨道平面之间相距60度,即轨道的升交点赤经各相差60度。
每个轨道平面内各颗卫星之间的升交角距相差90度,一轨道平面上的卫星比西边相邻轨道平面上的相应卫星超前30度。
在两万公里高空的GPS卫星,当地球对恒星来说自转一周时,它们绕地球运行二周,即绕地球一周的时间为12恒星时。
这样,对于地面观测者来说,每天将提前4分钟见到同一颗GPS卫星。
位于地平线以上的卫星颗数随着时间和地点的不同而不同,最少可见到4颗,最多可见到11颗。
在用GPS信号导航定位时,为了结算测站的三维坐标,必须观测4颗GPS卫星,称为定位星座。
这4颗卫星在观测过程中的几何位置分布对定位精度有一定的影响。
对于某地某时,甚至不能测得精确的点位坐标,这种时间段叫做“间隙段”。
但这种时间间隙段是很短暂的,并不影响全球绝大多数地方的全天候、高精度、连续实时的导航定位测量。
GPS工作卫星的编号和试验卫星基本相同。
【地面管制部份】对于导航定位来说,GPS卫星是一动态已知点。
星的位置是依据卫星发射的星历—描述卫星运动及其轨道的的参数算得的。
每颗GPS卫星所播发的星历,是由地面监控系统提供的。
卫星上的各种设备是否正常工作,以及卫星是否一直沿着预定轨道运行,都要由地面设备进行监测和控制。
地面监控系统另一重要作用是保持各颗卫星处于同一时间标准—GPS时间系统。
这就需要地面站监测各颗卫星的时间,求出钟差。
然后由地面注入站发给卫星,卫星再由导航电文发给用户设备。
GPS工作卫星的地面监控系统包括一个主控站、三个注入站和五个监测站。
【使用者接收机】GPS信号接收机的任务是:能够捕获到按一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,实时地计算出测站的三维位置,三维速度和时间。
GPS的工作原理,简单地说来,是利用我们熟知的几何与物理上一些基本原理。
首先我们假定卫星的位置为已知,而我们又能准确测定我们所在地点A至卫星之间的距离,那么A点一定是位于以卫星为中心、所测得距离为半径的圆球上。
进一步,我们又测得点A至另一卫星的距离,则A点一定处在前后两个圆球相交的圆环上。
我们还可测得与第三个卫星的距离,就可以确定A点只能是在三个圆球相交的两个点上。
根据一些地理知识,可以很容易排除其中一个不合理的位置。
当然也可以再测量A点至另一个卫星的距离,也能精确进行定位。
事实上,接收机往往可以锁住4颗以上的卫星,收到四颗则加上高程值这时,接收机可按卫星的星座分布分成若干组,每组4颗,然后通过算法挑选出误差最小的一组用作定位,从而提高精度。
以上所说,要实现精确定位,要解决两个问题:其一是要确知卫星的准确位置;其二是要准确测定卫星至地球上我们所在地点的距离。
下面我们看看怎样来做到这点。
怎样确知卫星的准确位置要确知卫星所处的准确位置。
首先,要通过深思熟虑,优化设计卫星运行轨道,而且,要由监测站通过各种手段,连续不断监测卫星的运行状态,适时发送控制指令,使卫星保持在正确的运行轨道。
将正确的运行轨迹编成星历,注入卫星,且经由卫星发送给GPS接收机。
正确接收每个卫星的星历,就可确知卫星的准确位置。
要准确测定信号传播时间,要解决两方面的问题。
一个是时间基准问题。
时间基准问题GPS系统在每颗卫星上装置有十分精密的原子钟,并由监测站经常进行校准。
卫星发送导航信息,同时也发送精确时间信息。
GPS接收机接收此信息,使与自身的时钟同步,就可获得准确的时间。
所以,GPS接收机除了能准确定位之外,还可产生精确的时间信息。
原子钟虽然十分精确,但也不是一点误差也没有。
GPS接收机中的时钟,不可能象在卫星上那样,设置昂贵的原子钟,所以就利用测定第四颗卫星,来校准GPS接收机的时钟。
我们前面提到,每测量三颗卫星可以定位一个点。
利用第四颗卫星和前面三颗卫星的组合,可以测得另一些点。
理想情况下,所有测得的点,都应该重合。
但实际上,并不完全重合。
利用这一点,反过来可以校准GPS接收机的时钟。
测定距离时选用卫星的相互几何位置,对测定的误差也不同。
为了精确的定位,可以多测一些卫星,选取几何位置相距较远的卫星组合,测得误差要小。
在我们提到测量误差时,还有一点要提到,就是美国的SA政策。
美国政府在GPS设计中,计划提供两种服务。
一种为标准定位服务(SPS),利用粗码(C/A)定位,精度约为100m,提供给民用。
另一种为精密定位服务(PPS),利用精码(P码)定位,精度达到10m,提供给军方和特许民间用户使用。
由于多次试验表明,SPS的定位精度已高于原设计,美国政府出于对自身安全的考虑,对民用码进行了一种称为“选择可用性SA(Selective Availability”的干扰,以确保其军用系统具有最佳的有效性。
由于SA通过卫星在导航电文中随机加入了误差信息,使得民用信号C/A码的定位精度降至二维均方根误差在100米左右。
采用差分GPS技术(DGPS,可消除以上所提到大部分误差,以及由于SA所造成的干扰,从而提高卫星导航定位的总体精度,使系统误差达到10到15米之内。
我们在地面用接收器接收来自卫星的坐标数据。
接收装置与这些卫星互相传送信号,确定接收器所在的位置,并且计算出经度、纬度、甚至高度。
凭借不断地与卫星进的信号传递,接收器能够在设定时间内采集数据,并计算出速度、距离和达到预设点的预计时间。
目前国际上常见到的GPS芯片主要是美国SIRF(Sirf )SiRF最新的第三代芯片SiRFstar III(GSW 3.0/3.1),采用20万次/频率的相关器提高了灵敏度,冷开机42秒,暖开机38秒,热开机8秒,可以同时追踪20个卫星信道。
我国的北京东方联星科技有限公司在08年上半年自主设计、开发出了当今世界启动速度最快的卫星导航芯片。
冷开机35秒,暖开机30秒,热开机1秒,小于1秒的重捕获时间,可以同时追踪32个卫星信道。
三代芯片的核心:芯片硬件大同小异,只是内部软件起主要作用。
所谓三代的核心技术只是在2代的基础上提高改进了软件的算法,就好比初、高中物理课上计算加速度/速度用的公式,但到了大学高等数学中导数、积分来计算同一道加速度/速度的物理题,方法(算法)不同,所用时间大不一样,体现了中学和大学的区别,就好像2代和3代一样。
其次是硬件也提供了质量标准。
三代芯片软件主要功能:3代芯片软件提高升级:(1)算法改进提高搜星/定位速度时间。
(2)通过软件滤波器提高抗干扰性能、信噪比及接收有效星颗数。
(3)有的芯片实现软件DR航迹(转迹)推算,提高抗高楼、树荫、桥下遮挡及隧道功能。
(4)软通道搜索,搜索提高可视卫星的通道数(可以12—24颗),人员、车辆、上下坡、姿态发生变化时、飞机、船舶星历状态发生变化时仍能继续定位。
三代芯片硬件改进:(1)芯片功耗降低,体积减少(与2代比)。
(2)提高抗干扰能力,全屏蔽或双芯片分开。
三代产品明显优势特点(实际效果):(1)定位时间快:无论冷启动、温启、热启,重捕时间均快5-30秒钟(与二代相比)。
(2)高感度:即在高楼、树荫、桥下、遮档、遂洞、窗口、车内,甚至车底盘下仍可很快定位收4颗以上卫星。
常说:有点天空就可定位(单星定位),也就是《给点阳光就灿烂》。
(3)抗干扰性能:高压线、电场、磁场、高速动态、微波、手机,同频干扰的环境下仍能正常工作。
(4)功耗低、省电:降低了功耗,甚至有睡眠状态(静态不工作),可以节电,提高产品待机时间。
(5)体积小,性能价格比好:体积小,重量轻,这是社会的需求和发展趋势,可以扩大更多的应用范围和领域。
GPS接收机主要由GPS接收机天线单元、GPS接收机主机单元和电源三部组成。
天线单元的主要功能是将GPS卫星信号非常微弱的电磁波转化为电流,并对这种信号电流进行放大和变频处理。
而接收机单元的主要功能是对经过放大和变频处理的信号电源进行跟踪、处理和测量,图1描述了GPS信号接收机的基本结构。
图1 GPS接收机的基本结构如果把GPS接收机作为用户测量系统,那么按其构成部分的性质和功能,可分为硬件部分和软件部分。
硬件部分,主要系指上述天线单元、接收单元的硬件设备。
而软件部分是支持接收机硬件实现其功能,并完成各种导航与定位任务的重要条件。
一般来说,软件包括内软件和外软件。
所谓内软件是指诸如控制接收机信号通道按时序对各卫星信号进行量测的软件以及内存或固化在中央处理器中的自动操作程序等。
这类软件已和接收机融为一体。
而外软件主要是指观测数据后处理的软件系统,这种软件一般以磁盘方式提供。
如果无特别说明,通常所说接收设备的软件均指后处理软件系统。
软件部分是构成现代GPS测量系统的重要组成部分之一。
一个功能齐全、品质良好的软件,不仅能方便用户使用,满足用户的各方面要求,而且对于改善定位精度,提高作业效率和开拓新的应用领域都具有重要意义。
所以,软件的质量与功能已成为反映现代GPS测量系统先进水平的一个重要标志。
2 天线单元天线单元由接收天线和前置放大器两个部件组成,如图2所示。
其基本功能,是接收GPS卫星信号,并把卫星信号的能量转化为相应的电流量,经过前置放大器,将微弱的GPS信号电流予以放大,送入频率变换器进行频率变换,以便接收机对信号进行跟踪和量测。
图2天线单元基本结构2.1 对天线的要求(1天线与前置放大器一般应密封为一体。
以保障其在恶劣的气象环境中能正常工作,并减少信号损失。
(2天线均应成全圆极化。
使天线的作用范围为整个上半球,在天顶处不产生死角,以保证能接收来自天空任何方向的卫星信号。
(3天线必须采取适当的防护和屏蔽措施。
以最大限度地减弱信号的多路径效应,防止信号被干扰。
(4天线的相位中心与几何中心之间的偏差应尽量小,且保持稳定。
由于GPS测量的观测量,是以天线的相位中心为准的,而在作业过程中,应尽可能保持两个中心的一致性和相位中心的稳定。
2.2天线的类型目前,GPS接收机的天线有多种类型,其基本类型见图3所示。
图3 天线类型(1单极天线。
这种天线属单频天线,具有结构简单,体积小的优点。
需要安装在一块基板上,以利于减弱多路径的影响。
(2螺旋形天线。
这种天线频带宽,全圆极化性能好,可接收来自任何方向的卫星信号。