功能指令
- 格式:ppt
- 大小:3.53 MB
- 文档页数:14
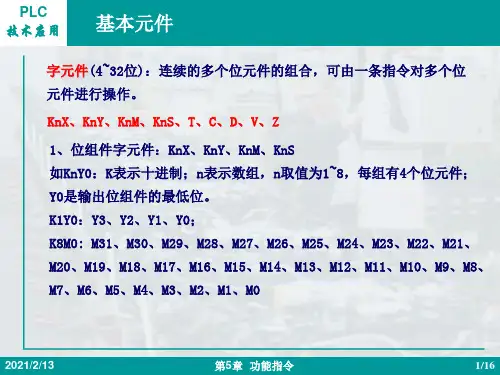
三菱PLC功能指令1.位操作指令:位操作指令用于读取、写入和修改位级别的数据。
常见的位操作指令包括LD(逻辑与)、ORR(逻辑或)、AND(逻辑与)、XOR(异或)等。
2.数据操作指令:数据操作指令用于读取、写入和修改字节、字和双字级别的数据。
常见的数据操作指令包括MOV(赋值)、ADD(加法)、SUB(减法)、MUL(乘法)、DIV(除法)等。
3.计数器指令:计数器指令用于实现计数功能。
有三种类型的计数器指令:上升沿计数器、下降沿计数器和阶段计数器。
计数器指令可以用于进行数量统计、进度监测等应用。
4.定时器指令:定时器指令用于实现定时功能。
有两种类型的定时器指令:上升沿定时器和下降沿定时器。
定时器指令可以用于进行时间监测、延时操作等应用。
5.移位指令:移位指令用于将数据的位进行移动。
常见的移位指令包括SHL(左移)、SHR(右移)等。
移位指令通常用于数据处理和位拼接等应用。
6.比较指令:比较指令用于比较两个数值的大小。
常见的比较指令包括CMP(比较)、EQ(等于)、NE(不等于)、GT(大于)等。
比较指令可以用于实现条件判断和逻辑控制等应用。
7.转移指令:转移指令用于控制程序的流程。
常见的转移指令包括JMP(无条件跳转)、JE(等于时跳转)、JNE(不等于时跳转)、JG(大于时跳转)等。
转移指令可以用于实现程序的循环和条件判断等应用。
8.存储器控制指令:存储器控制指令用于读取和写入存储器的数据。
常见的存储器控制指令包括LD(读取)、ST(写入)等。
存储器控制指令可以用于实现数据存储和加载等应用。
9.数学指令:数学指令用于实现各种数学运算。
常见的数学指令包括SIN(正弦)、COS(余弦)、SQRT(平方根)等。
数学指令可以用于实现数据处理和数值计算等应用。
10.基本运算指令:基本运算指令用于实现基本的数值运算。
常见的基本运算指令包括加法、减法、乘法和除法等。
基本运算指令通常用于实现逻辑计算和数据处理等应用。
plc功能指令PLC(可编程逻辑控制器)是一种用于自动化控制的电子设备,其功能指令是PLC在控制程序中使用的指令集。
PLC功能指令包括输入、输出、位操作、数学运算、数据处理、定时器和计数器等多种指令。
输入指令用于读取外部传感器或开关的状态,例如XIC(输入联系常闭)指令用于检测输入信号是否为常闭状态,而IIN(输入整数)指令用于读取模拟输入信号的数值。
输出指令用于控制外部执行器或继电器的操作,例如OTE(输出传送激活)指令用于激活输出信号,而TON(定时器开启)指令用于开启定时器。
位操作指令用于对位数据进行操作,例如AND(逻辑与)指令用于判断多个位数据是否同时为1,而XOR(异或)指令用于判断两个位数据是否不同。
数学运算指令用于对数字进行算术运算,例如ADD(加法)指令用于两个数相加,而SUB(减法)指令用于两个数相减。
数据处理指令用于对数据进行处理,例如MOV(移动)指令用于将数据从一个地址复制到另一个地址,而COM(比较)指令用于比较两个数据是否相等。
定时器指令用于设定和监控定时器的操作,例如TON(定时器开启)指令用于开启定时器,而TOF(定时器结束)指令用于检测定时器是否结束。
计数器指令用于设定和监控计数器的操作,例如CTU(计数器增加)指令用于增加计数器的值,而CTD(计数器减少)指令用于减少计数器的值。
除了以上常见的功能指令外,PLC还具有其他指令用于实现复杂的控制功能,例如比较指令、移位指令、程序控制指令等。
总之,PLC功能指令是PLC控制程序中使用的指令集,用于实现自动化控制系统的各种功能和操作。
这些指令的灵活运用可以实现复杂的控制逻辑,提高生产效率和质量。

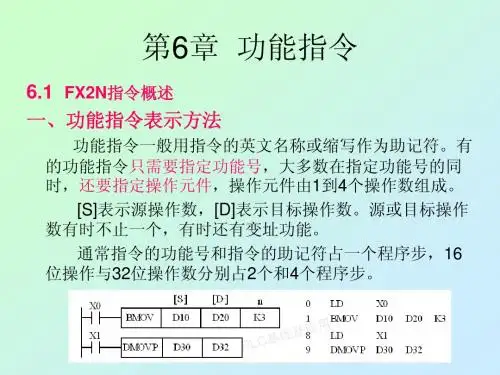
简述功能指令的执行方法及特点
功能指令是一种由用户通过语言或其他形式输入给机器人的指令,用于执行特定的功能或操作。
下面是功能指令的执行方法及特点的简要描述:
1. 执行方法:
- 文本输入:用户可通过与机器人对话、填写表单或使用特定的输入界面等方式,将指令以文本形式输入。
- 语音输入:用户通过语音识别技术,将口头指令转换为文本形式,再传递给机器人执行。
- 图像输入:用户通过拍照或上传图片的方式,将图像中的指令传递给机器人。
2. 特点:
- 实时反馈:功能指令通常会立即得到机器人的反馈,可以是文字回复、语音回答、特定操作等方式。
- 自动化执行:机器人会根据指令自动执行相应的功能,无需用户手动操作。
- 多样性:功能指令的范围很广,可以涵盖各种操作,如搜索信息、播放音乐、预订机票等。
- 个性化服务:机器人可以根据用户的个人需求和偏好执行相应的功能,提供个性化的服务。
- 学习能力:一些机器人具备自学习能力,可以根据用户的使用习惯和反馈进行改进和优化。
需要注意的是,具体的功能指令执行方法和特点可能因机器人的不同而有所差异,以上为一般情况的描述。