第5章 瞬态响应和稳态响应分析
- 格式:ppt
- 大小:7.14 MB
- 文档页数:9

第五章汽车转向系统动力学问题的提出汽车转向系统动力学是研究驾驶员给系统以转向指令后汽车在曲线行驶中的运动学和动力学特性。
这一特性影响到汽车操纵的方便性和稳定性,所以也是汽车安全性的重要因素之一,因而成为汽车系统动力学中重要研究内容之一。
汽车操纵稳定性是与汽车的车速密不可分的,早期的低速汽车还谈不上稳定性的问题,最早出现稳定性的问题,是在具有较高车速的轿车上或赛车上,目前,随着车速的不断提高,轿车、大客车、载货汽车的设计都离不开汽车操纵稳定性的研究。
近年来,有许多学者研究这一问题,并取得很多成果。
操纵性不好的汽车的主要表现:1.“飘” -有时驾驶员并没有发出转向的指令,而汽车开始自己改编本方向,使人感到汽车漂浮2.“贼”-有时汽车像受惊的马,忽东忽西,汽车不听驾驶员的指令;3.“反应迟钝”-驾驶员虽然发出指令。
但是汽车还没有转向反映,转向过程反应较慢;4.“晃”-驾驶员发出了稳定的转型指令,可使汽车左右摇摆,行驶方向难以稳定,当汽车受到路面不平,或者是侧向风扰动时,汽车就会出现左右摇摆;5.“丧失路感”-正常汽车转弯的程度,会通过转向盘在驾驶员的手上产生相应的感觉,有些汽车操纵性不好的汽车,特别是在汽车车速较高时,或转向急剧时会丧失这种感觉,这会增加驾驶员操纵困难,或影响驾驶员的正确判断6.“失去控制”-某些汽车的车速超过一个临界值以后,驾驶员已经不能控制器行驶的方向。
汽车的操纵稳定性:在驾驶者不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
汽车的操纵性:汽车能及时而准确的反映驾驶员主观操作的能力,也就是按照驾驶员的愿望维持或改变原来的行驶路线的能力。
汽车的稳定性:汽车在外力干扰下,仍能保持或很快恢复原来行驶状态和方向,而不致丧失控制、发生侧滑或翻车的能力。
101两者的关系:操纵性的丧失常导致侧滑、回转、甚至翻车;而稳定性的破坏也往往使汽车失去操纵性,处于危险状态。
控制系统的瞬态响应及其稳定性分析控制系统的瞬态响应及其稳定性分析是控制理论的重要内容之一、瞬态响应描述了一个控制系统在输入信号改变时的响应情况,稳定性分析则是评估系统响应的稳定性和可靠性。
下面将从瞬态响应和稳定性分析两个方面进行探讨。
一、瞬态响应分析瞬态响应指的是一个控制系统在输入信号发生改变时,系统在一定时间范围内达到稳态的过程。
常见的瞬态响应包括过渡过程和超调量等指标。
1.过渡过程:在一个控制系统中,当输入信号发生改变时,系统输出信号不会立即达到稳定状态,而是经历一个从初值到最终稳定状态的过渡过程。
过渡过程的主要指标有上升时间、峰值时间和调整时间。
-上升时间(Tr):指的是信号从初始值开始,达到其最终稳定值之间的时间间隔。
上升时间越短,系统的响应越快速。
-峰值时间(Tp):指的是信号首次超过最终稳定值所需的时间。
峰值时间越短,响应越快。
-调整时间(Ts):指的是信号从初始值到最终值之间的时间。
调整时间越短,系统的响应越快。
2.超调量:超调量是指在过渡过程中系统输出信号超过最终稳定状态的幅度。
超调量的大小可以直接反映系统的稳定性。
一般来说,超调量越小,系统的稳定性越好。
瞬态响应分析是评估系统性能的重要工具。
通过对瞬态响应的分析,可以了解系统的响应速度、稳定性和鲁棒性,并对系统进行优化和改进。
稳定性分析是评估控制系统稳态响应和稳定性的重要方法。
一个稳定的控制系统应该满足输入信号的变化不会引起系统输出信号的不稳定或震荡。
常见的稳定性分析方法有频域分析法和时域分析法。
1.频域分析法:频域分析主要利用系统的频率特性来分析系统的稳定性。
通过绘制系统的频率响应曲线,可以得到系统的增益和相位特性。
稳定性条件为系统的增益在截止频率处不为负值,即系统的增益曲线应该位于0dB线以上。
2.时域分析法:时域分析主要关注系统的时间响应曲线。
稳定性条件为系统在有限时间内达到并保持在稳定状态。
稳定性分析是评估控制系统性能的关键环节,它不仅可以帮助设计者理解系统的稳定性和鲁棒性,还可以为系统的优化和改进提供指导。


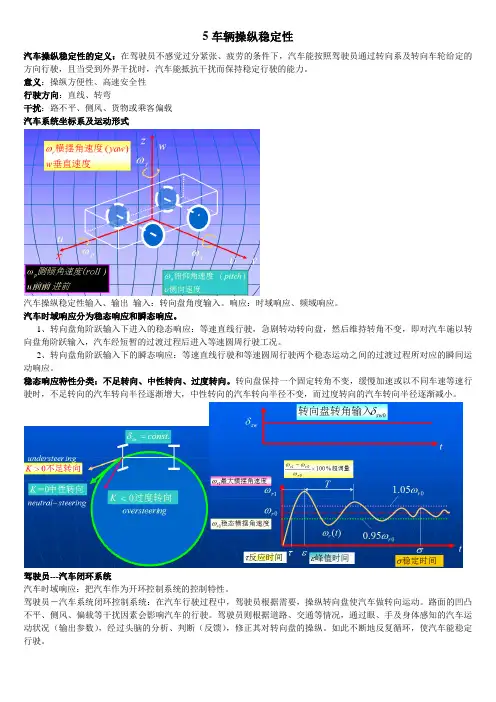
5车辆操纵稳定性汽车操纵稳定性的定义:在驾驶员不感觉过分紧张、疲劳的条件下,汽车能按照驾驶员通过转向系及转向车轮给定的方向行驶,且当受到外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
意义:操纵方便性、高速安全性行驶方向:直线、转弯干扰:路不平、侧风、货物或乘客偏载汽车系统坐标系及运动形式汽车操纵稳定性输入、输出输入:转向盘角度输入。
响应:时域响应、频域响应。
汽车时域响应分为稳态响应和瞬态响应。
1、转向盘角阶跃输入下进入的稳态响应:等速直线行驶,急剧转动转向盘,然后维持转角不变,即对汽车施以转向盘角阶跃输入,汽车经短暂的过渡过程后进入等速圆周行驶工况。
2、转向盘角阶跃输入下的瞬态响应:等速直线行驶和等速圆周行驶两个稳态运动之间的过渡过程所对应的瞬间运动响应。
稳态响应特性分类:不足转向、中性转向、过度转向。
转向盘保持一个固定转角不变,缓慢加速或以不同车速等速行驶时,不足转向的汽车转向半径逐渐增大,中性转向的汽车转向半径不变,而过度转向的汽车转向半径逐渐减小。
驾驶员---汽车闭环系统汽车时域响应:把汽车作为开环控制系统的控制特性。
驾驶员-汽车系统闭环控制系统:在汽车行驶过程中,驾驶员根据需要,操纵转向盘使汽车做转向运动。
路面的凹凸不平、侧风、偏载等干扰因素会影响汽车的行驶。
驾驶员则根据道路、交通等情况,通过眼、手及身体感知的汽车运动状况(输出参数),经过头脑的分析、判断(反馈),修正其对转向盘的操纵。
如此不断地反复循环,使汽车能稳定行驶。
汽车操纵稳定性的评价方法1、客观评价法:通过道路试验,用测试仪器测量转向时的汽车系统的物理参数。
试验项目:(1)、蛇形试验:评价汽车的随动性、收敛性、方向操纵轻便性和事故可避性等。
(2)、响应试验(转向盘转角阶跃输入)转向瞬态:评价汽车的动态特性。
(3)、转向瞬态响应试验(转向盘转角脉冲输入):评价汽车的动态特性。
(4)、转向回正性能试验:评价汽车从曲线行驶自行回复到直线行驶的过渡过程和能力。
化学反应器的稳态与动态响应分析一、引言化学反应器是化工过程中最主要的装置之一,在生产过程中扮演着至关重要的角色。
化学反应器可以控制反应的温度、压力、反应物质的浓度和速率等各种因素,提高反应效率和产品质量。
因此,研究化学反应器的稳态和动态响应对于优化反应过程、提高生产效率、降低成本具有至关重要的意义。
二、稳态分析稳态是指在一定的工作条件下,化学反应器内的各种物理和化学参数保持不变。
稳态分析是化学反应器的基本分析方法,可以用于评估反应器运行状态和反应器性能,具有很大的实用价值。
稳态分析的主要内容包括:1. 热力学分析热力学分析是研究反应物与产物间能量的转化规律,主要包括焓平衡、熵平衡、功平衡等。
热力学分析可以帮助我们确定反应器内的热平衡状态,为反应器温度的控制和优化提供依据。
2. 质量平衡分析质量平衡分析是指在一定时间内,反应物与产物在反应器内的质量守恒关系。
通过质量平衡分析,我们可以得到反应物的摩尔数、产物的产量以及反应的转化率等参数,为反应器的生产和控制提供依据。
3. 动量平衡分析动量平衡分析是指反应物及其它物质在反应器内的质量流动关系。
动量平衡分析可以得到反应器内流体的速度、压力、流量等参数,为反应器的设计和流体运动的优化提供指导。
三、动态响应分析动态响应是指在反应物和反应条件发生变化时,反应器内各种参数随时间变化的规律。
动态响应分析是化学反应器仿真和检测的重要手段,可以建立动态反应器模型,在模拟反应器反应过程中对各种参数进行计算和预测。
动态响应分析的主要内容包括:1. 反应动力学反应动力学是研究化学反应速率与反应条件关系的学科。
通过反应动力学的研究,我们可以了解反应物浓度、温度、压力等物理化学条件对反应速率的影响,为反应器的控制和操作提供依据。
2.传质与传热在反应过程中,反应物和产物需要经过传质和传热过程,这些过程对反应器内温度、压力、反应物浓度和产物产量等参数产生影响。
因此,对传质和传热过程的研究可以帮助我们理解反应器的运作规律,优化反应过程。