全状态反馈系统极点配置的数字仿真(终)
- 格式:doc
- 大小:257.50 KB
- 文档页数:4

状态反馈极点配置基本理论与方法IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】第2章 状态反馈极点配置设计基本理论引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
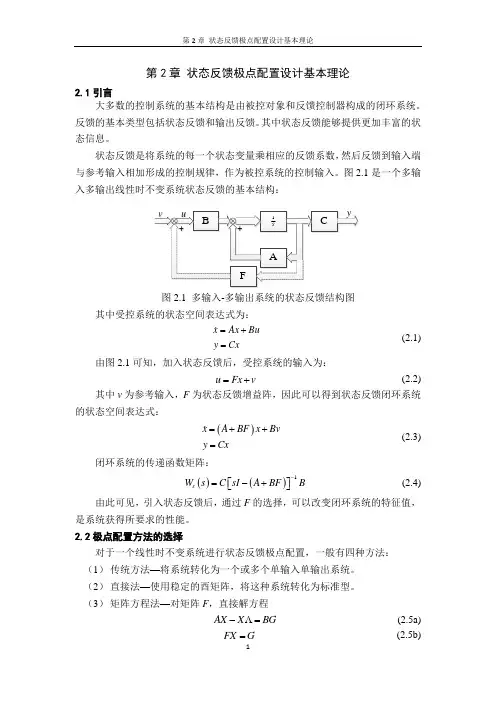
图是一个多输入多输出线性时不变系统状态反馈的基本结构:图 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+=由图可知,加入状态反馈后,受控系统的输入为:u Fx v =+其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++=闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3)矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ=FX G =(4)特征向量法—先找到特征向量x j (等式中矩阵X 的列向量),然后利用等式求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
本文结合以上方法提出了一种新的设计方法:首先通过酉变换将状态方程化为一种控制规范形,然后利用最小二乘法解方程的得到最佳的状态反馈矩阵。
东南大学自动化学院实验报告课程名称:自动控制基础实验名称:控制系统极点的任意配置院(系):自动化学院专业:自动化姓名:吴静学号:08008419实验室:实验组别:同组人员:实验时间:2011年4月29日评定成绩:审阅教师:一、实验目的1. 掌握用状态反馈的设计方法实现控制系统极点的任意配置;2. 用电路模拟的方法,研究参数的变化对系统性二、实验原理内容用全状态反馈实现二阶系统极点的任意配置,并用电路模拟的方法予予以实现; 理论证明,通过状态反馈的系统,其动态性能一定会优于只有输出反馈的系统。
设系统受控系统的动态方程为bu Ax x+= cx y =图6-1为其状态变量图。
图6-1 状态变量图令Kx r u -=,其中]...[21n k k k K =,r 为系统的给定量,x 为1⨯n 系统状态变量,u 为11⨯控制量。
则引入状态反馈后系统的状态方程变为bu x bK A x+-=)( 相应的特征多项式为)](det[bK A SI --,调节状态反馈阵K 的元素]...[21n k k k ,就能实现闭环系统极点的任意配置。
图6-2为引入状态反馈后系统的方框图。
图6-2 引入状态变量后系统的方框图实验时,二阶系统方框图如6-3所示。
图6-3 二阶系统的方框图引入状态反馈后系统的方框图如图6-4所示。
根据状态反馈后的性能指标:20.0≤p δ,s 5.0T p ≤,试确定状态反馈系数K1和K2图6-4 引入状态反馈后的二阶系统方框图三、实验步骤1.引入状态反馈前根据图6-3二阶系统的方框图,设计并组建该系统相应的模拟电路,如图6-9所示。
图6-9 引入状态反馈前的二阶系统模拟电路图在系统输入端加单位阶跃信号,用上位机软件观测c(t)输出点并记录相应的实验曲线,测量其超调量和过渡时间。
2.引入状态反馈后请预先根据前面给出的指标计算出状态反馈系数K1、K2。
根据图6-4引入状态反馈后的二阶系统的方框图,设计并组建该系统相应的模拟电路,如图6-10所示。

现代控制理论实验(一)线性系统的状态反馈及极点配置——09级自动化本科一.实验目的1.了解和掌握状态反馈及极点配置的原理。
2.了解和掌握利用矩阵法及传递函数法计算状态反馈及极点配置的原理与方法。
3.掌握在被控系统中如何进行状态反馈及极点配置,构建一个性能满足指标要求的新系统的方法。
二.实验原理及说明一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说,当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。
因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
若有被控系统如图3-3-61所示,它是一个Ⅰ型二阶闭环系统。
图3-3-61 被控系统如图3-3-61所示的被控系统的传递函数为:12021S 11)1(1)(a S a S b T TS T TS S T S i i i ++=++=++=φ (3-3-51) 采用零极点表达式为:))(()(210λλφ--=S S b S (3-3-52)进行状态反馈后,如图3-3-62所示,图中“输入增益阵”L 是用来满足静态要求。
图3-3-62 状态反馈后被控系统设状态反馈后零极点表达式为:))(()(21**--=λλφS S b S (3-3-53)1.矩阵法计算状态反馈及极点配置1)被控系统被控系统状态系统变量图见图3-3-63。
图3-3-63 被控系统状态系统变量状态反馈后的被控系统状态系统变量图见图3-3-64。
图3-3-64 状态反馈后的被控系统状态系统变量图图3-3-61的被控系统的状态方程和输出方程为:状态方程:⎪⎪⎪⎩⎪⎪⎪⎨⎧=+-=+-=••1i 1i 2211X Y u T 1X T 1X X T 1X T 1X (3-3-54)⎪⎩⎪⎨⎧=+==•∑CxY u Ax X B C B A 0),,(式中[]01,T 10B 0T 1T 1T 1A ,i i 21=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=C x x x , 被控系统的特征多项式和传递函数分别为:12010a a b S b )(+++=S S S φB A)C(SI 1--=)(A -SI det a a )(f 0120=++=S S S 可通过如下变换(设P 为能控标准型变换矩阵): —x P X =将∑0C B A ),,(化为能控标准型 ),,(————C B A ∑,即: ⎪⎩⎪⎨⎧=+=•——————x C Y u x A B X 式中 ⎥⎦⎤⎢⎣⎡-==-101a -a 10AP P A — , ⎥⎦⎤⎢⎣⎡==-10B P B 1— , []10b b CP C ==— 2)被控系统针对能控标准型),,(————C B A ∑引入状态反馈:⎥⎦⎤⎢⎣⎡=-=—————式中10k k k xk u ν (3-3-55)可求得对—x 的闭环系统),,—————C B k B A (-∑的状态空间表达式: 仍为能控标准型,即: ⎪⎩⎪⎨⎧=+-=•————————)(x C Y u x B k B A X 式中 ⎥⎦⎤⎢⎣⎡+-+-=-)()(—————1100k a k a 10k B A则闭环系统),,(——————C B k B A -∑的特征多项式和传递函数分别为: )()(—————00112k k a k a k)B (A SI det )(f ++++=⎥⎦⎤⎢⎣⎡--=S S S )k a (k a b S b B )k B A (SI C )(00112011k ———————)(+++++=⎥⎦⎤⎢⎣⎡--=-S S S φ3)被控系统如图3-3-61所示:其中:05.01==T T i则其被控系统的状态方程和输出方程为:[]XY uX X 0110012020=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=期望性能指标为:超调量M P ≤20%;峰值时间t P ≤0.5秒。
综合性实验 极点配置全状态反馈控制一、实验目的1.学习并掌握用极点配置方法设计全状态反馈控制系统的方法。
2.用电路模拟与软件仿真方法研究参数对系统性能的影响。
二、实验内容1.设计典型二阶系统的极点配置全状态反馈控制系统,并进行电路模拟与软件仿真研究。
2.设计典型三阶系统的极点配置全状态反馈控制系统,并进行电路模拟与软件仿真研究。
三、实验前准备工作1 推导图1的数学模型(状态空间表达式),分析系统的能控性。
2 若系统期望的性能指标为:超调量25%p M ≤,峰值时间0.5p t ≤,求出期望的极点值。
根据以上性能指标要求设计出状态反馈控制器。
3 推导图2的数学模型(传递函数),求出其单位阶跃响应的动态性能指标(超调量、调节时间、静态速度误差系数)。
4 推导图4的数学模型(状态空间表达式),分析系统的能控性。
5考虑系统稳定性等要求,选择理想极点为:S 1=-9,S 2 =-2+j2,S 3=-2-j2, 根据以上性能指标要求思考如何设计状态反馈控制器。
6 推导图7的数学模型(传递函数)。
四、实验步骤1.典型二阶系统(1)对一已知二阶系统(见图1)用极点配置方法设计全状态反馈系数。
(2)见图2和图3,利用实验箱上的电路单元U9、U11、U12和U8,按设计参数设计并连接成系统模拟电路,测取阶跃响应,并与软件仿真结果比较。
(3)改变系统模拟电路接线,使系统恢复到图1所示情况,测取阶跃响应,并与软件仿真结果比较。
(4)对实验结果进行比较、分析,并完成实验报告。
2.典型三阶系统(1)对一已知三阶系统(见图4)用极点配置方法设计全状态反馈系数。
(2)见图5和图7,利用实验箱上的电路单元U9、U11、U12、U15和U8,按设计参数设计并连接成系统模拟电路,测取阶跃响应,并与软件仿真结果比较。
(3)改变系统模拟电路接线,使系统恢复到图5所示情况,测取阶跃响应,并与软件仿真结果比较。
软件仿真直接在MATLAB 中实现。
第2章 状态反馈极点配置设计基本理论2.1引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
图2.1是一个多输入多输出线性时不变系统状态反馈的基本结构:图2.1 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+= (2.1)由图2.1可知,加入状态反馈后,受控系统的输入为:u Fx v =+ (2.2)其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++= (2.3)闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦ (2.4)由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
2.2极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3) 矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ= (2.5a)FX G = (2.5b)(4) 特征向量法—先找到特征向量x j (等式(2.5)中矩阵X 的列向量),然后利用等式(2.5b)求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解(2.5a)方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
实验报告课程名称:现代控制理论实验名称:线性系统状态反馈与极点配置、实验目的1. 学习并掌握利用MATLAB编程平台进行控制系统设计与仿真的方法。
2. 通过仿真实验,研究并总结线性定常系统状态反馈对系统控制性能影响的规律。
3. 通过仿真实验,研究并总结状态反馈对状态不完全能控系统控制性能影响的规律。
二、实验内容(一)实验任务:1. 自行选择一个状态完全能控型SISO 系统模型及参数,并设定系统控制性能指标,根据性能指标要求计算期望的极点并进行极点配置,设计MatLab实验程序(或SimuLink模拟图)及实验步骤,仿真研究状态反馈矩阵对系统控制性能的影响;2. 自行选择一个状态不完全能控型SISO 系统模型及参数,并设定系统控制性能指标,根据性能指标要求进行极点配置,设计MatLab实验程序(或SimuLink模拟图)及实验步骤,仿真研究状态反馈矩阵对系统控制性能的影响;根据实验结果,总结各自的规律。
三、实验设计1. 实验条件1. 利用本学期所学的现代控制理论的知识为基础。
2. 笔记本电脑,matlab四、实验过程1. 设计状态完全能控型SISO 系统模型及参数:a)首先判断系统的能控性= ,是Rack([B AB]) = 2,因此此系统为可控的系统。
可以进行任意极点配置。
则期望极点配置二重根1b ) 再求状态反馈阵 :c ) 根据给定的极点,得到期望特征多项式:d )比较和 各对应项系数,可解得:e )即状态反馈控制器:u=-K*x状态反馈闭环系统空间表达式 x=A-B*K*xA1 = A -B*K = [0 1 ; 1 -2]2. 设计状态不完全能控型 SISO 系统模型及参数:a )首先判断系统的能控性, Rank ([B AB]) = 1,因此系统是不完全能控的,b )再求状态反馈阵c )将期望极点配置二重根 1,则:d )比较 和 各对应项系数,可解得:任意值e )即状态反馈控制器:u=-K*x 状态反馈闭环系统空间表达式 x=A-B*K*xA1 = A -B*K = [01; 1 1]五、实验结果(曲线、数据等)1 •状态完全能控型SISO 系统模型:a )配置极点前的波形: A=[0 1; 0 1]不能进行任意极点配 设)b)配置极点后的波形: A1 = A -B*K = [01; 1-2]3. 状态不完全能控型SISO 系统模型a )配置极点前的波形:A=[1 01]■* l-lgu-'E 1 fit E占Jl 血血JWEfllulk 氐*lap ffilndort 也 b□X Fi1J j dk %鵲 、七禺v 插-<2 D £ ■ dM IP 2*S4«|> R :吐parish13ID ・■-霊■・4卜2-1J ftTO2D3) 4D 也Ihrme liucondy.)*a)配置极点后的波形:六、实验结果分析与讨论1•状态完全能控型SISO系统模型通过配置极点后动态性能变好,但是稳态误差不能消除。
实验报告线性系统的状态反馈及极点配置一.实验要求了解和掌握状态反馈的原理,观察和分析极点配置后系统的阶跃响应曲线。
二.实验内容及步骤1.观察极点配置前系统极点配置前系统的模拟电路见图3-3-64所示。
图3-3-64 极点配置前系统的模拟电路实验步骤:注:‘S ST’不能用“短路套”短接!(1)将信号发生器(B1)中的阶跃输出0/+5V作为系统的信号输入r(t)。
(2)构造模拟电路:按图3-3-64安置短路套及测孔联线,表如下。
(3)虚拟示波器(B3)的联接:示波器输入端CH1接到A3单元输出端OUT(Uo)。
注:CH1选‘X1’档。
(4)运行、观察、记录:将信号发生器(B1)Y输出,施加于被测系统的输入端rt,按下信号发生器(B1)阶跃信号按钮时(0→+5V阶跃),观察Y从0V阶跃+5V时被测系统的时域特性。
等待一个完整的波形出来后,点击停止,然后移动游标测量其调节时间ts。
实验图像:由图得ts=3.880s 2.观察极点配置后系统 极点的计算:受控系统如图所示,若受控系统完全可控,则通过状态反馈可以任意配置极点。
受控系统设期望性能指标为:超调量M P ≤5%;峰值时间t P ≤0.5秒。
由1095.01t 707.0%5eM n n 2n p 1/p 2=≥⇒≤-==⇒≤=--ωωζωπζζζπ取因此,根据性能指标确定系统希望极点为:⎪⎩⎪⎨⎧--=+-=07.707.707.707.7*2*1j j λλ受控系统的状态方程和输出方程为:⎪⎩⎪⎨⎧=+=-----⋅-xC y b x A x μ式中][01,10,020120,21=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=----C b A x x x系统的传递函数为:202020a S a S βS β)(2012010++=+++=S S S G受控制系统的可控规范形为:[][]020T C C b T b a a T A T A X T X X C Y U b X A X K K i o K K KK k K K K ===⎥⎦⎤⎢⎣⎡==⎥⎦⎤-⎢⎣⎡-=⎥⎦⎤-⎢⎣⎡-===⎩⎨⎧=+=---10111,1020120010T ββ为变换阵),(式中当引入状态反馈阵K K =[K 0K 1]后,闭环系统()K K K K K C b K b A ,,-的传递函数为:()()()01201120120)20(20)(K S K S K a S K a S S S G o ++++=+++++=ββ而希望的闭环系统特征多项为:1001.14))(()(2*2*1**12*++=--=++=S S S S a S a S S f oλλ 令G K (S)的分母等于F #(S),则得到K K 为:[][]9.58010-==K K K k最后确定原受控系统的状态反馈阵K :由于 1-=T K K k求得和===---111,T C b T b T A T A K k K求得 ⎥⎥⎦⎤⎢⎢⎣⎡-=-1102011T所以状态反馈阵为: [][]9.59.91102019.580-=⎥⎥⎦⎤⎢⎢⎣⎡--=K极点配置系统如图所示:极点配置后系统根据极点配置后系统设计的模拟电路见下图所示。
线性系统的状态反馈及极点配置1.前言随着现代控制理论的不断发展和成熟,线性系统的状态反馈控制在控制理论中得到了广泛的应用,并成为了控制领域中重要的一种控制方法。
状态反馈控制能够将系统的状态进行反馈,并利用反馈得到的信息对系统进行控制,从而达到使系统达到预期控制目标的目的。
本文将从状态反馈控制的原理和实现方法两方面介绍线性系统的状态反馈及极点配置。
2.状态反馈控制的原理状态反馈控制是建立在现代控制理论的基础上的一种高级控制方法。
状态反馈控制的基本思想是在系统中引入反馈环节,设计一个反馈控制器,将系统的状态量反馈给控制器,控制器再根据反馈信号输出控制量,以期望控制系统按照预期的运动轨迹运行。
因此,状态反馈控制要实现以下两个步骤:- 系统状态量的测量:首先要在系统中安装测量传感器,实时地测量系统状态量,使得状态量可以被反馈到控制器中。
- 反馈控制器的设计:设计一个反馈控制器,将系统的状态量反馈给控制器,控制器再根据反馈信号输出控制量,实现对系统的精确控制。
因此,状态反馈控制的基本原理就是将系统状态量反馈到控制器中,以期望控制系统按照预期的运动轨迹运行。
2.2 状态空间模型与状态反馈控制状态空间模型是状态反馈控制的基础。
状态空间模型是一种方便描述线性系统动态行为和控制器的模型。
对于线性时不变系统,我们可以用如下的状态变量描述:x(t) = [x1(t),x2(t),...,xn(t)]T其中,x(t) 是系统在时刻 t 的状态量,n 是状态量的数量,x1(t),x2(t),...,xn(t) 分别是系统的每个状态量。
状态空间模型可以用一组线性常微分方程描述:dx/dt = Ax + Bu其中,A 是系统的状态方程矩阵,B 是输入矩阵,C 是输出矩阵,D 是直接耦合矩阵。
系统的状态反馈控制可以表示为:u(t) = -Kx(t)其中,K 是状态反馈矩阵。
将状态反馈控制引入到状态空间模型中,可以得到控制器的状态空间模型为:y = Cx上述控制器的状态空间模型就是一个闭环系统,通过反馈控制器将系统状态返回到系统,形成了一个反馈环。
实验一全状态反馈系统极点配置的数字仿真一、实验目的1掌握全状态反馈系统的极点配置方法;2研究不同极点配置对系统特性的影响。
二、实验原理闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息。
利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。
设SIMO(Single Input-Multi Output)受控系统的动态方程为,状态向量通过状态反馈矩阵,负反馈至系统参考输入,于是有这样便构成了状态反馈系统,其结构图如图1-1所示图1-1 SIMO状态反馈系统结构图状态反馈系统动态方程为,(1-1)闭环系统特征多项式为(1-2)设闭环系统的期望极点为,,…,,则系统的期望特征多项式为(1-3)欲使闭环系统的极点取期望值,只需令式(1-2)和式(1-3)相等,即(1-4)利用式(1-4)左右两边对应的同次项系数相等,可以求出状态反馈矩阵例如SISO(Single Input-Single Output)受控系统的开环传递函数为若采用输出单位反馈构成闭环系统,则该系统显然是不稳定的,若按指定的极点配置,采用全状态反馈构成闭环系统,则可以满足给定的性能要求。
原系统可控标准形形式的状态方程和输出方程为由于本系统是完全可控的,能够通过反馈向量的选择,使闭环系统的极点置于所希望的位置上,以满足系统的性能指标要求。
若根据系统的性能指标,希望配置的极点为,,则采用状态反馈后系统的特征多项式为希望的系统特征多项式为比较上述两个多项式得系统状态反馈向量为因此,加入状态反馈后,闭环系统的状态方程为其结构图如图1-2所示图1-2 状态反馈系统结构图三、实验内容及步骤实验通过MATLAB软件实现。
1.双击MATLAB图标或单击开始菜单,依次指向“程序”、“MATLAB”,单击MATLAB,进入MATLAB命令窗口。
单击MATLAB工具条上的Simulink图标,运行后出现Simulink模块库浏览器,并单击其工具条左边的图标,弹出新建模型窗口。
实验一 全状态反馈系统极点配置的数字仿真
一、实验目的
1掌握全状态反馈系统的极点配置方法;
2研究不同极点配置对系统特性的影响。
二、实验原理
闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息。
利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。
设SIMO (Single Input-Multi Output )受控系统的动态方程为
u A b x x
+= ,x y C = 状态向量x 通过状态反馈矩阵k ,负反馈至系统参考输入v ,于是有
u v kx =+
这样便构成了状态反馈系统,其结构图如图1-1所示
图1-1 SIMO 状态反馈系统结构图
状态反馈系统动态方程为 x ()A bk x bv =++,x y C = (1-1)
闭环系统特征多项式为
()()f I A bk λλ=-+ (1-2)
设闭环系统的期望极点为1λ,2λ,…,n λ,则系统的期望特征多项式为
)())(()(21*n f λλλλλλλ---= (1-3)
欲使闭环系统的极点取期望值,只需令式(1-2)和式(1-3)相等,即
)()(*λλf f = (1-4)
利用式(1-4)左右两边对应λ的同次项系数相等,可以求出状态反馈矩阵
[]n k k k 21=k
例如SISO (Single Input-Single Output )受控系统的开环传递函数为
3
1)(s s G = 若采用输出单位反馈构成闭环系统,则该系统显然是不稳定的,若按指定的极点配置,采用
全状态反馈构成闭环系统,则可以满足给定的性能要求。
原系统可控标准形形式的状态方程和输出方程为
u x x x u A ⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=+=100000100010321b x x []⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡==321001x x x C y x 由于本系统是完全可控的,能够通过反馈向量k 的选择,使闭环系统的极点置于所希望的位置上,以满足系统的性能指标要求。
若根据系统的性能指标,希望配置的极点为31-=p ,2j 23,2±-=p ,则采用状态反馈后系统的特征多项式为
32321()det[I ()]f A bk k k k λλλλλ=-+=---
希望的系统特征多项式为
*32()(3)(2j2)(2j2)72024f λλλλλλλ=++-++=+++
比较上述两个多项式得系统状态反馈向量为
[][]123k 24207k k k ==---
因此,加入状态反馈后,闭环系统的状态方程为
u x x x u A ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+=10072024100010321b x x 其结构图如图1-2所示
图1-2 状态反馈系统结构图
三、实验内容及步骤
实验通过MATLAB 软件实现。
1. 双击MATLAB 图标或单击开始菜单,依次指向“程序”、“MATLAB ”,单击MATLAB ,进入MATLAB 命令窗口。
单击MATLAB 工具条上的Simulink 图标
,运行后出现Simulink 模块库浏览器,并单击其工具条左边的图标,弹出新建模型窗口。
2.在模块库浏览器窗口中的Simulink 下的输入源模块(Sources)、数学运算模块(Math)、连续系统模块(Continuous)、接收模块(Sinks)库中,分别选择阶跃信号(Step)、求和(Sum)、常量增益(Gain)、积分环节(Integrator)、示波器(Scope)模块,建立如图1-3 所示的仿真图。
图1-3 MATLAB 下状态反馈系统仿真图
3.用鼠标左键双击阶跃信号和各比例环节的模型,设置好参数;选择Simulation 菜单中parameters 选项,设置好仿真参数;选择Simulation 菜单中的start 选项,开始仿真;观察并记录下系统的输出。
4.通过状态反馈,将控制系统的闭环极点设置为110p =-,1j 13,2±-=p ,重复3、4步骤。
此时[][]123k 8106k k k ==---
5.通过状态反馈,将控制系统的闭环极点设置为130p =-,2,33j3p =-±,重复3、4步骤。
此时[][]1
23k 6116k k k ==--- 四、实验报告内容
1.理论计算希望配置的极点为41-=p ,1j 13,2±-=p 和11-=p ,22-=p ,33-=p 时的反馈向量[]321k k k =k ;
2.屏幕拷贝下三组极点配置下的系统响应曲线;并根据响应曲线确定s t 、p t 和%σ。
五、实验思考题
1.在状态反馈系统中,极点任意配置的充要条件是什么?2.试比较状态反馈系统与经典控制理论中的输出反馈系统。
3.。