永磁电动机磁路计算中主要系数有限元分析
- 格式:pdf
- 大小:958.58 KB
- 文档页数:5
永磁同步电机的有限元模型
永磁同步电机的有限元模型是通过将电机分割成许多小的单元,
每个单元都可以用数学模型来描述电磁和机械特性。
具体而言,有限
元模型主要包含三个方面的内容:电磁方程、磁路方程和机械方程。
其中,电磁方程用于描述电机的电磁特性,磁路方程用于描述电机的
磁场分布,机械方程用于描述电机的机械特性。
电磁方程主要包括磁场方程、电场方程和运动方程。
其中,磁场
方程描述了磁场的生成和变化,电场方程描述了电势的分布和变化,
运动方程描述了电机的运动状态和电势之间的关系。
磁路方程主要针
对电机的磁路结构,通过磁通量连续性条件和磁动势平衡条件,求解
出电机中各个磁路单元的磁通量和磁动势分布。
机械方程则包括动力
学方程和转矩方程,用于描述电机的机械性能,包括加速、减速、转
矩和扭矩等物理量。
通过对这些方程进行数值求解,可以得到各个单元的电磁、磁路
和机械状态参数,进而得出整个电机的电磁、磁路和机械性能。
这样,就可以用有限元模型来模拟和分析永磁同步电机在不同工况下的性能
表现,如转速、转矩、效率和功率因数等,为电机的设计和优化提供
基础和参考。
合肥工业大学博士后学位论文磁力机械的有限元分析及其特性研究姓名:杨红申请学位级别:博士后专业:机械理论与设计指导教师:赵韩20011101摘要合肥工业大学博士后研究工作报告摘要现代科学技术革命给人类带来了高度发展的现代文明,造就了。
批新学科和新产业的诞生。
磁力机械学是近十余年来发展起来的无污染、节能、覆盖面广的综合性科学,这门科学一出现就显示出它强大的生命力,并在相关的技术领域得到广泛应用和研究。
如:节能、环保、制造、机械、医学、农业、生物、国防等领域,而且其应用范围还在不断扩大。
节能和环保是人类可持续发展中面临的两大问题。
从今后科学技术发展趋势来看,溶入高新技术,保护人类生存环境是应用技术的研究主题。
作为磁力机械学理论的应用——磁力技术,既能达到节能目的,又能满足环保要求,是符合可持续发展的绿色制造技术。
所以,磁力机械学及磁力应用技术将在机械学领域扮演愈来愈重要的角色,为人类的可持续发展做出贡献。
首先本文简要介绍了永磁材料的发展及其特性,以及永磁材料在机械部件中的应用,总结了磁力机械的种类以及电磁场问题的若干研究方法,并着重介绍了有限元法在磁力机械学领域应用与研究的基本思想。
其次详细介绍了二维平面磁场和二维轴对称磁场的数学建模方法,这是全文的理论基础。
为了在保证足够精度的条件下减小计算的工作量,本文采用四节点四边形单元对求解区域进行剖分,系统地推导出等参单元的有限元分析方法。
强加边界条件的处理,以及对称性和周期性条件的利用,使有限元计算模型得到缩减,从而使数据的准备工作和计算工作量大幅度地降低。
再次本文计算了稀土永磁齿轮和磁性联轴器的传动磁场,建立起它们的二维平面有限元模型。
对于径向磁性联轴器,可以利用传动磁场的对称性条件和周期性边界条件,缩减联轴器的求解区域,极大地减小了有限元离散方程的建立规模:在有限元计算中,由于剖分网格的形状以及疏密程度极大地影响计算结果的精度以及计算规模,文中详细研究了永磁体、气隙以及扇形区域中四边形剖分过程,防止生成退化的四边形单元,在保证精度的同时极大地缩减了计算时间。
双转子径向永磁电机的设计与有限元分析3曹江华, 杨向宇, 肖如晶(华南理工大学,广东广州 510640) 摘 要:介绍了双转子径向永磁电机的基本结构、原理及特性,采用解析法分析了其电感参数的计算,并给出了设计依据,最后利用有限元法对所设计的电机进行了静态磁场的分析和电感计算值的验证。
结果表明,双转子径向永磁电机在磁场上可看作由共用定子铁心的两个传统内、外转子永磁电机并联而成,而电感计算则可看作串联,电感的解析值与有限元计算值吻合得较好,证明了电机分析和设计的可行性。
关键词:双转子径向永磁电机;电感计算;有限元分析中图分类号:T M302∶T M351 文献标识码:A 文章编号:167326540(2010)0120008205D esi gn and F i n ite 2Elem en t Ana lysis of D ua l 2RotorRad i a l 2Flux Per manen t M agnet M otorCAO J iang 2hua, YAN G X iang 2yu, X I AO R u 2jing(South China University of Technol ogy,Guangzhou 510640,China ) Abstract:Dual 2r ot or radial 2flux per manent magnet mot or can substantially i m p r ove the t orque density and effi 2ciency .Its basic structure,operati on p rinci p le and characteristics were intr oduced,calculating the inductance by an 2alytic method and giving the design basis .I n additi on,the finite 2ele ment method was used t o analyze the static mag 2netic field and the effectiveness of the calculated inductance was p r oved .The results showed that the magnetic field of dual 2r ot or radial 2flux per manent magnet machines can be regarded as a parallel combinati on of t w o traditi onal inner and outer per manent magnet mot or shared a common stat or core and the inductance was f or med in series .Moreover,the inductance values calculated by the analytic and finite 2ele ment method match well and thus verify the feasibility of the analysis and design of the machine .Key words:dua l 2rotor rad i a l 2flux per manen t magnet m otor;ca lcul a ti on of i n duct ance;f i n ite 2ele m en t a 2na lysis3广州市科技计划项目(2008Z12D421)0 引 言高转矩密度和高效率是电机最重要的两个指标,这两方面的改进一直是电机研究的重点。
湖南工程学院应用技术学院毕业设计(论文)诚信承诺书本人慎重承诺和声明:所撰写的《永磁同步发电机的设计及磁场有限元分析》是在指导老师的指导下自主完成,文中所有引文或引用数据、图表均已注解说明来源,本人愿意为由此引起的后果承担责任。
设计(论文)的研究成果归属学校所有。
学生(签名)年月日湖南工程学院应用技术学院毕业设计(论文)任务书题目:永磁同步发电机的设计及磁场有限元分析姓名 ***** 系************ 专业电气工程及其自动化班级 **** 学号 ************ 指导老师 ******* 职称 ****** 教研室主任 ******一、基本任务及要求:1、基本数据:1)额定功率:P N =7.5K W2)连接方式:Y3)额定电压:U N =400V4)额定转速:n N =1500r∕min5)相数: m=36)功率因数:cos =0.97)效率:η= 0.948)冷却方式:空气冷却2、本毕业设计课题主要完成以下设计内容:(1)按所给定技术要求完成永磁同步发电机的电磁设计方案;(2)用ANSOFT或ANSYS有限元法对发电机磁场进行仿真研究;(3)说明书编制。
二、进度安排及完成时间:2月27 日—— 3月 10日:查阅资料、撰写文献综述、撰写开题报告3月11 日—— 3月 23日:毕业实习、撰写实习报告3月24 日—— 4月 25日:毕业设计(电磁设计)4月 26日—— 5月 20日:毕业设计(磁场有限元分析)5月下旬:毕业设计中期抽查5月21 日——6月1日:撰写毕业设计说明书(论文)6月2 日——6月9日:修改、装订毕业设计说明书(论文),并将电子文档上传FTP 6月10 日——6月12日:毕业设计答辩前言随着现代工业的高速发展,能源的需求量也日益增加。
电能作为现代工业中最重要的二次能源,也发挥着越来越重要的作用。
而电机作为电能的生产者和主要的消费者,它的需求量在工业制造中占有很大的比例。
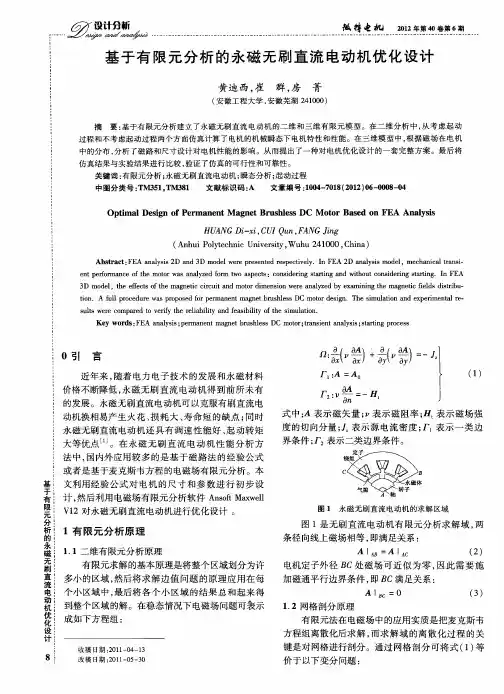
永磁无刷直流电机的设计与电磁分析1.确定电机的功率需求:根据应用场景和使用要求,确定电机所需的功率大小。
功率通常由电机的输出扭矩和转速来决定。
2.选择永磁体:根据电机的功率需求选择适当的永磁体。
永磁体的质量和磁场强度会直接影响电机的性能。
3.确定电机的结构参数:根据电机的功率和永磁体的特性,确定电机的尺寸和结构参数。
包括定子绕组的匝数、绕组的截面积、铁芯厚度等。
4.确定永磁体的磁路:根据电机的结构参数和永磁体的特性,设计电机的磁路。
通过优化磁路结构,提高电机的磁场分布和效率。
5.优化电机的绕组设计:根据电机的功率需求和电流大小,优化电机的绕组设计。
绕组的材料和截面积决定了电机的耐受能力和效率。
电磁分析是永磁无刷直流电机设计中的重要环节,主要包括电机的磁场分布和效率分析。
电磁分析主要通过有限元建模和仿真分析来实现。
1.有限元建模:将电机的结构参数、永磁体的特性和绕组的设计转化为电机的几何模型。
通过建立几何模型,将电机分为不同的区域和网格,计算每个区域的磁场分布和电磁力。
2.磁场分布分析:根据几何模型和边界条件,计算电机中各个区域的磁场分布。
通过计算磁场分布,可以了解电机的磁场强度、磁通分布和磁能分布等。
3.效率分析:根据磁场分布和绕组参数,计算电机的电磁力、电流和功率损耗等。
通过计算效率分布,可以评估电机的性能和工作效率。
4.仿真分析:通过仿真模拟,模拟电机的动态性能和控制特性。
可以评估电机的加速度、动态响应和调速范围等。
以上是永磁无刷直流电机设计与电磁分析的基本内容,通过合理的设计与分析,可以提高电机的工作效率和性能。
同时,还可以优化电机的结构和材料,减轻电机的重量和体积,提高电机的功率密度和综合性能。
永磁直流电动机的有限元分析曾晓珊;陈世元;冯臣【摘要】采用Visual Basic语言,编制了有限元分析软件,并对永磁直流电动机进行空载计算,得出了空载状态下的磁场分布图和气隙磁密分布曲线,并提出了减少电动机漏磁的改进方法。
%In this paper introduces a way to establish the finite element analysis software based on the Visual Basic language.And then use it to calculate the motor no-load characteristic,get the no-load magnetic field distribution curve of the motor and the flux density distribution curve.And propose a method to reduce the motor magnetic flux leakage.【期刊名称】《宁波职业技术学院学报》【年(卷),期】2013(000)005【总页数】4页(P78-81)【关键词】永磁直流电动机;有限元法;空载计算;磁场分布图;气隙磁密分布曲线【作者】曾晓珊;陈世元;冯臣【作者单位】华南理工大学,广州 510640;华南理工大学,广州 510640;广东肇庆爱龙威机电有限公司,广东肇庆 526238【正文语种】中文【中图分类】TM33;O242.210 引言永磁直流电动机是由永磁体建立励磁磁场的直流电动机,它除了具有普通电励磁直流电动机所具备的下垂的机械特性、线性的调节特性、调速范围宽和便于控制等特点外,还具有体积小、效率高、用铜量少、结构简单和运行可靠等优点。
在永磁直流电机性能分析方法中,一般都是应用磁路法及一些经验公式来核算电机性能,本文则采用基于麦克斯韦方程的电磁场有限元方法来分析。
永磁电机的有限元仿真分析姚光久(广东电网公司中山供电局,广东中山528400)摘要:本文利用Ansfot公司的Maxwell2D瞬态模块,建立了永磁电机模型,加载激励源构成一个完整的仿真系统。
通过对永磁电机模型瞬态有限元分析,得到了电机五种状态磁力线与反电动势。
仿真结果精确地反映了电机运动过程,为永磁电机优化设计、减少转矩脉动、提高效率提供了理论依据。
关键词:永磁电机;五种状态;瞬态分析中图分类号:TM3文献标识码:A1引言永磁电机是把永磁电机本体、电子技术和控制技术融为一体的电磁机械装置,早期用于军事和航天领域,如卫星姿态控制、导弹测试用转台等,稍后被应用于工业加工领域,用作高性能机床的驱动[1]。
由于构成这类电机驱动系统的成本太高,在民用领域没有得到推广。
近年来,随着构成永磁同步电动机主要成本的永磁材料、电力电子器件、微处理器价格的不断降低,技术的进步使得研究永磁电机成为当代电气传动界的热门课题之一[2-3]。
永磁电机具有体积小、功率高、无转子损耗、转动惯量小和较高的转矩密度、转矩平稳性良好及振动噪音低等优点。
2静态分析软件由于永磁同步电动机的非线性特性,在运行过程中必然有一些参数发生非线性变化,以固定参数带入方程进行求解的方法会带来很大的误差,而且由于永磁同步电动机结构的特殊性,其参数也很难由传统的参数计算方法来精确确定。
随着计算机辅助设计技术的飞速发展,涌现出了许多用于电磁场有限元数值计算的软件。
静态场对动态元件迭代次数要求低,静态分析有限元软件占多数。
然而仅仅静态分析,不能分析计算电机的模型。
但是其他软件在涡流场和瞬态场分析方面较为欠缺,存在后处理功能薄弱、3D图像渲染能力缺失等缺点,给电机运行的计算带来困难。
Ansoft公司推出的Maxwell2D电磁场分析软件不仅具有完善的静态电磁场分析功能,对瞬变电磁场的分析同样卓越,具有强大的后处理功能,为永磁电机参数的计算提供了一个快捷、方便、准确的计算工具[4]。
基于ANSYS8.0的永磁直线电机的有限元分析及计算摘要永磁直线电机是一种具有很高定位精度的新型电机。
不同与其他励磁的直线电机,它采用永磁体作为励磁源。
研究其磁场分布及力特性具有重要意义。
相对于传统的解析法,有限元数值分析可以缩短电机的设计周期及减少设计成本,可对直线电机的磁场及力得出精确的分析。
ANSYS8.0是一种在工程中广泛使用的有限元分析软件,采用该软件中的电磁场分析功能对永磁直线电机的磁场进行有限元的分析和计算,并在此分析的基础上对永磁直线电机的力场做进一步的计算和分析,对永磁直线电机的设计具有重要的工程意义。
通过电磁场的有限元数值分析方法,利用通用有限元分析软件ANSYS8.0建立平板型单边永磁直线电机的有限元模型,分析其2维静态磁场,得到初步的分析结果,并在这个分析的基础上对永磁直线电机的力场进行了进一步的分析,计算直线电机的推力和法向力,结合永磁直线电机的静态磁场,研究了永磁直线电机推力及法向力和电流变化的相互关系,对今后永磁直线电机的设计和研究具有一定的参考意义。
关键词永磁直线电机、有限元、ANSYS、电磁场、推力、法向力- i -Finite Element Analysis and Calcultation of a Permanent Magnet Linear Motor Based on ANSYS8.0AbstractThe permanent magnet linear motor is a kind of new electrical engineering that has the very high fixed position accuracy.The differents between the permanent linear motor and the type of non-permanent is that it adopts thepermanent be the source of dlux Opposite in traditional resolution method,Finite element analysis can shorten the design period of the electrical engineering and reduce to the design cost,it also can get the analysis of a precision tu the magnetic field and fotce of the linear motor the ansys8.0 is a finitr element analvtical software.Throught the method of the Finite element for the electromagnetic analysis,we use ANSYS8.0 creat a model for the Permanent magnet lineat motor with finite element method.We analysis its 2-D setaic magnetic and get the first result. Then we analysis the force field by finish the analysis of its magetic field We calaulate the thrust and normal force combining the analysis of the permanent magnet linear motor,study the relationship between thecurrent and thrust,normal force.The work for this paper can give some help and advice to the study and design of the permanent linear motorKeywordsPMLSM, ANSYS, FEM,Electromagnetic field, thrust, normal force致谢在本次毕业设计的过程中,首先要衷心感谢我的指导老师余佩琼,在这一个学期的的毕业设计期间给于我很多的指导和帮助,在我遇到困难的时候,给了我许多有用的建议和提示。
永磁同步风力发电机的有限元分析张 兆 强(上海交通大学电子信息与电气工程学院,上海 200240)[摘 要]选择内转子直驱永磁的电机系统结构进行风力发电机设计。
采用等效磁路的方法进行了初步设计。
使用有限元方法分析了电机在空载、额定负载和三相短路情况下的工作特性。
结果表明电机齿槽转矩小、工作点合理,且短路状态下不会发生永磁材料的永久去磁。
[关键词]风力发电机设计;有限元分析;永磁[中图分类号] TM313 [文献标识码]A [文章编号] 1000-3983(2007)05-0018-04Finite Element Analysis for Permanent Magnet Synchronous GeneratorZHANG Zhao-qiang(Department of Electronics Information and Electrical Engineering,Shanghai Jiaotong University, Shanghai 200240, China)Abstract: Inner-rotor direct-coupled structure is adopted in wind generator design. Pre-design of the generator is carried out with equivalent magnet circuit method. The generator characteristics in the states of no load, rated load and short circuit are analyzed with finite element method. The result shows that the cogging torque is small and working points are reasonable, and irreversible demagnetization will not happen in short circuit state.Key words: wind generator design; finite element analysis; permanent magnet1概述目前风力发电中使用较多的是双馈电机变速恒频风力发电系统,这是因为其控制风力机在一个较宽的转速范围内运行,能最大限度地捕捉风能,又能调节有功功率和无功功率,起到补偿功率因数的作用。
第3章永磁电机的磁路设计与计算•简单磁路分析法•磁网络分析法常用电机分析方法有有限元法,简单磁路法和磁网络法。
1. 有限元法(Finite element analysis )可以准确计算电机的静态特性,但是这种方法仍较为复杂,需用较长的计算时间。
2. 简单等效磁路法(Simplified magnetic circuit )建立电机的局部等效磁路,磁路构成简单,计算精度较差,但计算耗时少,可应用于电机的定性分析。
3. 磁网络法(Magnetic network )建立整个电机的磁网络模型,通过编程对铁芯饱和进行迭代计算,计算精度接近有限元法,计算耗时接近等效磁路法,非常适合电机的初始设计阶段。
缺点是建模过程较为复杂。
永磁电机的常用计算方法永磁励磁与电励磁的差别电励磁永磁励磁m m h H H 111-=δδ磁势不随外磁路而改变,保持常数mm h H H 222-=δδNI H =δδ0=+m m h H H δδ•永磁磁势随外磁路的改变而改变,不是常数mr m H B B 0μ+=永磁励磁与电励磁的差别)(δR R l H F m m m m +Φ==)(00δδμ+μΦ=A A l m m 1. 简单磁路法1.1 永磁体等效方法H B B r r μμ-=0rc B H H μμ-=0(a) 稀土永磁(b)铁氧体永磁(c)铝镍钴永磁对于图c ,r r B B '=对于图b 、c ,cc H H '=mmmr r m r m r m Hh h A HA A B B A μμ-Φ=μμ-=00乘以永磁体截面积用磁通和磁动势表示Φr ——虚拟内禀磁通Φm ——永磁体向外磁路提供的总磁通Φ0——虚拟自退磁(内漏磁)磁通mmmr m r Hh h A HA μμ=μμ=Φ000m r m ir r A B A B ==Φ0Φ-Φ==Φr m m BA 1. 简单磁路法1.1 永磁体等效方法mF 0Λ=磁通源(电流源)mc r m F F 000Λ-Λ=Φ-Φ=Φ0ΛΦ-=m c m F F mc c h H F =磁动势源(电压源)1. 简单磁路法1.1 永磁体等效方法永磁体磁通Φ01. 简单磁路法1.1 永磁体等效方法ΦδΦσ主磁通——主磁通Φδ漏磁通——Φσ⎩⎨⎧Λ→Λ→σσδδΦΦΦm1. 简单磁路法1.1永磁体等效方法——空载外磁路永磁体等效磁路空载时外磁路δ0δδσδn σδΛΛΛΛΛΛΛΛΛσ=+==+='0aσδδaδσσaa 111σFΛΛΛF ΛΛΛF F =+=+='主磁通——气隙磁通Φδ漏磁通——Φσ直轴电枢反应磁动势F a σ0空载漏磁系数戴维南等效变换1. 简单磁路法1.1永磁体等效方法——负载外磁路磁通源磁动势源主磁导:与磁路的饱和程度有关漏磁导:Λσ取决于关系。
永磁直线电机的有限元分析及计算永磁直线电机(Permanent Magnet Linear Motor,简称PMLM)是一种将电能转化为直线机械能的装置,它由永磁体组成的固定子和线圈组成的动子构成。
与传统的旋转电机不同,PMLM能够直接输出直线运动,并且具有大力密度、高效率和较低的噪音。
在永磁直线电机的设计和优化过程中,有限元分析(Finite Element Analysis,简称FEA)和计算是非常重要的工具。
在有限元分析中,将电机内部的磁场、电流、力等物理量划分为有限数量的元素和节点,并使用数值方法求解模型的行为。
通过FEA方法,可以定量地评估永磁直线电机的性能指标,如功率、力矩、效率等。
有限元分析通常包括以下步骤:1.建立几何模型:将永磁直线电机的各个组成部分,如永磁体、线圈、铁心等,准确地建模为几何实体。
2.网格划分:将几何模型划分为有限数量的单元和节点,常用的划分方法包括四面体划分、六面体划分、三角形划分等。
3.求解磁场分布:根据电机的电流和永磁体的磁性,使用麦克斯韦方程和安培定律求解磁场分布,并获取磁力密度分布、磁场线轨迹等。
4.计算电机的力矩和力:通过磁场和电流之间的相互作用,计算电机在工作状态下的力矩和力。
5.评估性能指标:根据有限元分析结果,评估永磁直线电机的性能指标,如功率、效率、力矩密度等。
有限元分析不仅可以用于永磁直线电机的静态分析,还可以用于动态分析。
在动态分析中,需要考虑电机的运动状况和电机响应的时间变化。
通过有限元分析,可以评估电机在不同速度、不同负载情况下的性能。
在计算方面,可以使用有限元软件,如ANSYS、COMSOLMultiphysics等,进行永磁直线电机的有限元分析。
这些软件提供了强大的模拟和计算功能,可以帮助工程师快速准确地分析电机的力学和电磁特性。
总之,有限元分析和计算是永磁直线电机设计和优化的关键工具之一、通过使用有限元分析,可以定量地评估电机的性能,指导电机的设计和优化,并提高电机的效率和可靠性。