ch8 交通系统建模与仿真
- 格式:ppt
- 大小:1.38 MB
- 文档页数:19
智能交通仿真系统的设计与实现智能交通系统是当今城市交通领域的热门话题之一,它能够利用智能化技术来增强城市交通的安全、流畅和效率。
将现实中的交通场景投射到计算机虚拟空间中进行仿真模拟,就可以让科研人员、交通规划者和公众更加真实地理解和体验城市交通系统的行为。
在这篇文章中,我们将会详细介绍智能交通仿真系统的设计和实现。
一、智能交通仿真系统的架构智能交通仿真系统(Intelligent Transportation System,ITS)由三个主要的组件构成:交通数据管理系统、交通仿真系统和交通决策系统。
其中,交通数据管理系统用于存储、处理和管理不同类型的交通数据,交通仿真系统模拟真实世界中的交通场景,交通决策系统基于交通数据和仿真结果进行预测和决策。
智能交通仿真系统的架构可以简单地分为两层。
第一层是仿真核心,包括仿真引擎、场景建模与渲染、车辆运动控制、交通规则引擎等。
第二层是上层应用,包括交通仿真分析、交通决策支持、交通管理与监控等。
上层应用依赖于仿真核心提供的仿真模型和仿真结果,可以提供更加复杂和实用的服务。
二、智能交通仿真系统的实现智能交通仿真系统的实现过程包括数据获取、场景建模、故障模拟、交通仿真和仿真结果分析等几个阶段。
1. 数据获取在实现智能交通仿真系统之前,需要在实验室或者综合交通管理中心建立一个交通数据管理系统,采集不同类型的交通数据,包括路网数据、交通流数据、车辆数据、路口信号灯数据、天气数据等。
这些数据将用于车辆运动模拟、交通流模拟、交通规则引擎等方面。
2. 场景建模场景建模是将真实的交通场景转换为计算机虚拟空间中的仿真场景的过程。
场景建模可以采用基于三维建模软件的手工建模、激光雷达扫描和相机拍摄等多种方式。
建模过程中需要对路面、交通标志、交通信号灯、车辆、行人、建筑物等元素进行建模。
随着时代的变迁,一线城市的道路、交通标志等已经有了较新的变化,因此需要反映新时期的实际情况。
3. 故障模拟故障模拟是为了模拟现实中的交通故障事件,如车祸、路障、道路施工等,从而测试智能交通系统的应急响应能力。
1. VISSIM介绍VISSIM为德国PTV公司开发的微观交通流仿真软件系统,用于交通系统的各种运行分析。
该软件系统能分析在车道类型、交通组成、交通信号控制、停让控制等众多条件下的交通运行情况,具有分析、评价、优化交通网络、设计方案比较等功能,是分析许多交通问题的有效工具。
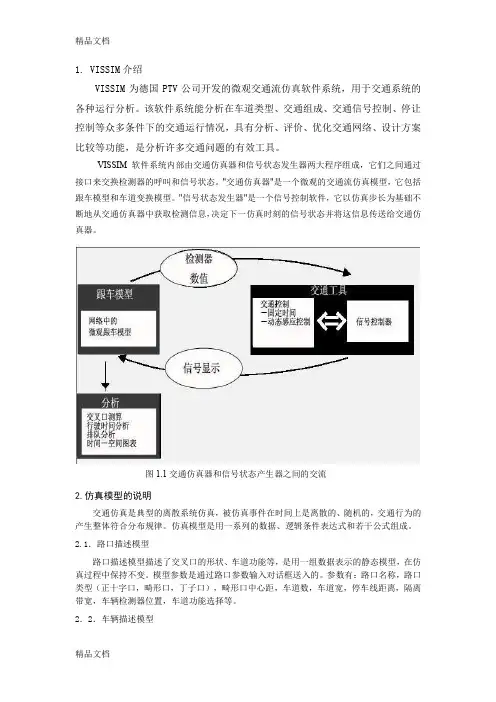
VISSIM软件系统内部由交通仿真器和信号状态发生器两大程序组成,它们之间通过接口来交换检测器的呼叫和信号状态。
"交通仿真器"是一个微观的交通流仿真模型,它包括跟车模型和车道变换模型。
"信号状态发生器"是一个信号控制软件,它以仿真步长为基础不断地从交通仿真器中获取检测信息,决定下一仿真时刻的信号状态并将这信息传送给交通仿真器。
图1.1交通仿真器和信号状态产生器之间的交流2.仿真模型的说明交通仿真是典型的离散系统仿真,被仿真事件在时间上是离散的、随机的,交通行为的产生整体符合分布规律。
仿真模型是用一系列的数据、逻辑条件表达式和若干公式组成。
2.1.路口描述模型路口描述模型描述了交叉口的形状、车道功能等,是用一组数据表示的静态模型,在仿真过程中保持不变。
模型参数是通过路口参数输入对话框送入的。
参数有:路口名称,路口类型(正十字口,畸形口,丁子口),畸形口中心距,车道数,车道宽,停车线距离,隔离带宽,车辆检测器位置,车道功能选择等。
2.2.车辆描述模型车辆描述模型描述了车辆的形状、位置、颜色、速度、来向、去向、期望速度、车辆反应时间等。
模型参数随着车辆的随机生成而产生,某些参数随着车辆的运行而改变。
车辆描述模型与车辆生成模型、车辆运行模型有着密切的关系,是它们模型算法执行结果的直接反映。
2.3.车辆生成模型车辆生成模型描述了车辆的随机到达数分布,到达车辆的车型分布,到达车辆的流向分布,到达车辆车道选择方法,到达车辆车色分布。
车辆生成模型是交叉口车辆运行模型的基础。
(1)车辆到达数分布模型车辆到达数的分布是离散型的随机分布,又称之计数分布,反映了在某一固定时段内到达给定地点车辆的随机数。
交通工程技术课程仿真实验案例交通工程是一门研究交通规律及其应用的技术科学,旨在通过合理规划、设计、运营和管理交通系统,提高交通运输的效率、安全性和可持续性。
在交通工程技术课程中,仿真实验是一种非常重要的教学手段,它可以帮助学生直观地理解交通现象和规律,掌握交通工程的分析方法和技术。
本文将介绍几个典型的交通工程技术课程仿真实验案例,以期为相关教学和研究提供参考。
一、交通信号控制仿真实验交通信号控制是城市交通管理的重要手段之一,通过合理设置信号灯的相位和时长,可以优化交通流的运行,减少拥堵和延误。
在交通信号控制仿真实验中,通常使用微观交通仿真软件,如 VISSIM 等,构建交通网络模型,设置交通流量、车辆类型、道路条件等参数,然后对不同的信号控制方案进行模拟和评估。
例如,对于一个十字交叉口,可以设计定时控制、感应控制和自适应控制等不同的信号控制方案。
在定时控制方案中,信号灯的相位和时长是固定的;在感应控制方案中,信号灯根据车辆的到达情况实时调整绿灯时长;在自适应控制方案中,信号灯通过与上游检测器的通信,实时获取交通流量信息,并根据预设的算法自动优化相位和时长。
通过对这些方案的仿真模拟,可以比较它们在不同交通流量条件下的性能指标,如平均延误、停车次数、排队长度等,从而选择最优的信号控制方案。
二、高速公路交通流仿真实验高速公路是现代交通运输的重要组成部分,其交通流特性与城市道路有很大的不同。
在高速公路交通流仿真实验中,通常关注车辆的自由流速度、跟车行为、换道行为等。
通过构建高速公路模型,设置不同的交通流量、车道数量、坡度等参数,可以研究高速公路的通行能力、拥堵形成和消散过程等。
例如,可以模拟在节假日等高峰时段,大量车辆涌入高速公路导致的拥堵现象。
通过分析车辆的速度分布、密度分布和流量变化,可以了解拥堵的传播规律和影响范围。
同时,还可以研究不同的交通管理措施,如限速、限流、设置应急车道等,对缓解拥堵的效果。
智慧交通管理系统仿真实验在当今社会,交通拥堵已成为各大城市面临的严峻问题之一。
为了有效缓解交通拥堵,提高交通运行效率,保障交通安全,智慧交通管理系统应运而生。
而智慧交通管理系统仿真实验则是在实际应用前,对系统进行模拟和测试的重要手段。
智慧交通管理系统是一个复杂的综合性系统,它整合了多种技术和手段,包括传感器技术、通信技术、数据分析技术、智能控制技术等。
通过这些技术的协同作用,实现对交通流量、路况、车辆行为等信息的实时采集、分析和处理,并据此做出相应的交通管理决策,如交通信号控制、道路疏导、车辆限行等。
智慧交通管理系统仿真实验的目的主要有以下几个方面。
首先,它可以帮助我们在系统实际部署前,对其性能和效果进行预测和评估。
通过在虚拟环境中模拟不同的交通场景和交通流量,我们可以了解系统在各种情况下的响应和表现,从而发现潜在的问题和不足,并进行针对性的改进和优化。
其次,仿真实验可以降低系统开发和测试的成本。
在实际环境中进行测试往往需要大量的人力、物力和财力投入,而且还可能对正常的交通秩序造成影响。
而通过仿真实验,我们可以在虚拟环境中快速、便捷地进行多次测试和试验,大大提高了开发效率,降低了成本。
此外,仿真实验还可以为交通管理政策的制定提供科学依据。
通过对不同管理策略在仿真环境中的效果进行比较和分析,我们可以选择最优的管理方案,提高交通管理的科学性和有效性。
在进行智慧交通管理系统仿真实验时,首先需要建立一个逼真的交通模型。
这个模型要能够准确地反映实际交通系统的特征和行为,包括车辆的生成、行驶、跟驰、换道等行为,以及道路的几何形状、交通信号设置、交通规则等因素。
为了建立这样一个模型,通常需要收集大量的实际交通数据,如交通流量、车速、车辆类型等,并运用数学方法和计算机技术对这些数据进行分析和处理,从而确定模型的参数和规则。
在建立了交通模型之后,接下来需要选择合适的仿真软件和工具。
目前,市场上有许多专门用于交通仿真的软件,如 VISSIM、SUMO、TransModeler 等。
双向航道船舶交通流元胞自动机模型及仿真引言随着全球船舶交通的日益繁忙,保证船舶安全和交通效率成为一个重要的问题。
为了研究船舶在双向航道中的交通流量,我们提出了一种基于元胞自动机的模型,并进行了相应的仿真实验。
本文将介绍我们的模型设计、实验方法以及仿真结果。
背景在双向航道中,船舶交通流动复杂,不同船舶在航道中的行为会对整体交通造成影响。
因此,研究船舶在双向航道中的交通流量对于提高交通效率和安全性具有重要意义。
元胞自动机是一种模拟复杂系统行为的数学工具。
它可以将系统划分为许多离散单元,每个单元都有自己的状态和行为规则。
通过定义单元之间的相互作用规则,可以模拟出整体系统的行为。
在本文中,我们将利用元胞自动机模型来模拟双向航道中的船舶交通流。
方法模型设计我们的元胞自动机模型基于以下假设:1.航道被划分为离散的单元格,每个单元格代表一段长度相等的航道。
2.每个单元格可以容纳一艘船舶。
3.船舶的行为受到速度限制和相邻船舶的影响。
4.船舶可以做出四个动作:保持当前速度、加速、减速、变道。
基于上述假设,我们设计了如下的元胞自动机模型规则:1.每个单元格的初始状态为空,可以随机生成船舶。
2.每个船舶根据相邻船舶的位置和速度来决策自己的行动。
3.船舶在行动后,会更新其所在单元格的状态。
实验方法为了验证我们的模型的有效性,我们设计了一系列实验。
实验过程如下:1.初始化航道状态:设置航道长度和初始船舶数量。
2.按照模型规则,更新航道中每个船舶的状态。
3.重复步骤2,直到达到预设的模拟时间。
4.分析仿真结果。
我们将关注航道的流量、拥挤度等指标。
结果与分析经过多次实验,我们得到了如下的仿真结果:1.航道流量与初始船舶数量呈正相关关系。
随着船舶数量的增加,航道的流量也随之增加。
2.船舶的行为会受到相邻船舶的影响。
当船舶密度较高时,船舶更容易受到限制,无法加速或变道。
3.船舶的变道行为能够减少航道的拥塞程度。
当船舶有机会变道时,航道的拥塞情况会得到改善。
中国农业大学学报 2002,7(2):99~103 Jour nal o f China Ag ricultur al U niv er sity 8自由度乘坐动力学模型及时域仿真王国权¹ 余 群 吕 伟(中国农业大学车辆与交通学院)摘 要 为克服频率响应法对车辆平顺性预测的局限性,建立了8自由度的汽车乘坐动力学模型和随机路面激励的时域模型。
乘坐动力学模型考虑了包括坐椅在内的车辆的垂直、俯仰和侧倾3种运动。
利用M A T L A B/SIM U LI NK仿真工具对某型车辆在B级路面行驶时的平顺性进行了时域仿真分析。
研究结果表明,此方法能够快速地对车辆在随机路面行驶的平顺性进行预测和评价。
关键词 乘坐动力学;随机路面;时域仿真;悬架;平顺性中图分类号 U461.4Eight Freedom Vehicle Ride Dynamics Mathematical Modeland Simulation in Time DomainWang Guoquan,Yu Qun,L Wei(College of Vehicle and T raffic En gineering,China Agricultural U nivers ity,Beijing100083,Ch ina)Abstract T o overco me the lim itation of frequencey respo nding analy sis metho d,an eig ht fr eedo m model o f vehicle ride dynamic w as dev elo ped.T he m odel inv olves the v ehicle vibration in v ertical,pitching and lo ng puter sim ulation in time do main of the vehicle ride on B grade road that use the M atlab/Sim ulink w as carr ied out.T he research result show ed that this m ethod can be used to evaluate and predict the ride com fo rt of v ehicle running o n the rando m ro ad,it is helpful to desig n and control the v ehicle suspension sy stem.Key words vehicle ride dy namics;r ide comfort;simulation in time do main;suspension sy stem乘坐动力学是汽车动力学的一个分支,主要研究汽车的垂直运动,侧倾运动及俯仰运动,其研究目的是为了确定车辆悬架的结构、参数及控制方式(主动悬架)对汽车平顺性的影响[1]。
基于多智能体系统的智能交通模型建立与仿真随着城市人口的增加和交通出行需求的不断增长,如何有效管理和优化城市交通系统成为了一个亟待解决的问题。
基于多智能体系统的智能交通模型的建立与仿真技术为我们提供了一种有效的方法,可以帮助我们了解交通系统的运行特点、预测交通状况,并设计出更加高效和环保的交通方案。
一、智能交通模型建立的意义智能交通模型是通过建立交通网络、模拟车辆行驶和交通流动等方式,对城市交通系统进行描述和分析的模型。
它可以帮助我们从系统的全局角度来认识交通问题,预测交通拥堵、事故发生等情况,为交通管理提供科学依据。
智能交通模型的建立有助于我们更好地理解交通系统的复杂性和动态性。
交通系统是一个典型的多智能体系统,包含了大量的车辆、交通信号、行人等要素,因此交通系统的行为具有高度的不确定性和非线性。
智能交通模型能够帮助我们模拟和分析交通系统中各个要素之间的相互作用,揭示交通系统运行的规律和机制,为城市交通管理决策提供有力支持。
二、智能交通模型建立的方法1. 数据采集与处理智能交通模型建立的第一步是收集相关的交通数据。
包括交通流量、车辆速度、通行时间等信息。
现代交通监测技术的发展使得数据采集变得更加便利。
交通摄像头、车载传感器、无线通信技术等设备能够实时地采集交通数据,并将其传输到数据中心进行分析和处理。
数据处理主要包括数据清洗、数据标注和数据挖掘等步骤。
首先需要对原始数据进行清洗,包括去除异常值、填补缺失值等操作,以确保数据的准确性和完整性。
然后对清洗后的数据进行标注,将其与交通网络地图等信息进行匹配,以便构建交通系统的拓扑结构。
最后,使用数据挖掘技术从大量的数据中提取出有用的信息,例如交通拥堵的原因、拥堵的时空分布等。
2. 交通网络建模交通网络是智能交通模型的核心。
通过建立交通网络,可以描述交通系统中各个要素之间的相互关系和相互作用。
交通网络模型可以分为宏观模型和微观模型两种。
宏观模型主要研究交通流量的分布和拥堵情况等整体特征。
智能交通系统的建模与仿真随着城市化进程的加速和交通问题的日益突显,智能交通系统作为一种解决城市交通问题的有效手段受到了广泛关注。
智能交通系统可以通过集成各种先进的技术手段,实现交通流的优化调度,提高交通效率,减少交通拥堵,降低交通事故率等目标。
因此,建立智能交通系统的模型并进行仿真分析,对于研究智能交通系统的运行规律,预测系统的未来运行状态,制定有效的技术措施具有重要的意义。
一、智能交通系统的建模智能交通系统可分为四个层次:道路层、车辆层、用户层和管理层。
在系统的建模过程中,需要将这些层次进行统一的描述,从而使系统具有可设计性、可测试性、可优化性和可实现性等特点。
1. 道路层的建模道路层是智能交通系统的基础,道路的质量、长度、宽度、车行道标识和交通信号系统等都会对整个系统的运行和流量产生影响。
因为道路的数目较大,所以在建模过程中需要对道路进行分类和概括。
道路层建模的主要原则是将道路分为大中小三类,然后根据道路类型(高速公路、城市道路、乡村公路)覆盖率进行划分。
根据统计数据,城市交通拥堵问题最突出,因此需要对城市道路系统进行详细的模型建立。
2. 车辆层的建模车辆层是智能交通系统中的重要组成部分,是道路层的运行实体。
因此,对车辆层的建模是模拟系统运行的基础,其主要任务是准确描述车辆行为和仿真车辆运动。
车辆层的建模需要考虑车辆类型、数量、行驶速度、行驶方向和可行驶面积。
车辆类型的描述和建模需要考虑车辆的长度、车宽、类型、马力、燃料类型等属性,并且需对车辆进行分类。
对车辆数量的建模需要考虑车辆周期性发生的变化规律和计算途中引起的变化、流量变化等。
车辆速度的建模需要考虑车辆流量、流速、加速减速等因素。
3. 用户层的建模用户层是指交通系统的利用者,其通过车辆执行交通活动。
对用户层的建模,需要考虑人员流量和时间分配,以及对交通系统的相关行为进行描述。
用户层的建模是一个特别复杂的问题,包括了人群规模大小、上下班高峰时段、出行路线和行为规则的统计等多方面的细节和随机性因素。
双向航道船舶交通流元胞自动机模型及仿真
船舶交通流是指在航道上行驶的船舶在空间和时间上的相互作用。
为了研究船舶交通流的规律和优化航道管理,可以借助元胞自动机模型进行仿真。
元胞自动机是一种离散事件模型,将航道划分为一系列离散的空间单元,称为元胞。
每个元胞都具有一定的状态,例如有船或无船。
在模型中,每个元胞的状态会根据一定的规则进行更新和变化。
船舶在这个模型中以时间步长为单位进行移动,并根据一定的规则来改变船舶的状态。
在双向航道中,船舶的交通流可以分为两个方向,即正向和反向。
模型中需要考虑船舶在两个方向上的行驶规则,并进行相应的调整。
在正向航道中船舶只能向前行驶,在反向航道中船舶只能向后行驶。
模型还需要考虑船舶之间的相互碰撞规避问题,以及船舶速度等因素对交通流的影响。
在模型仿真中,可以设置一些初始状态和参数,例如船舶的初始位置、速度等,并通过不断更新船舶状态的规则来模拟交通流的变化。
可以使用随机数生成器来模拟船舶的随机行为,例如船舶的出现、移动和消失等。
通过多次运行模型,可以得到不同情况下的船舶交通流图像,进而研究船舶交通流的规律和优化策略。
双向航道船舶交通流元胞自动机模型及仿真可以对船舶交通流进行高效准确的模拟和研究,为优化航道管理和规划提供理论支持。
可以根据实际情况进行模型参数的调整和算法的优化,以适应不同场景下的船舶交通流仿真需求。
收稿日期:20121127基金项目:国家自然科学基金资助项目(51175040);广东省教育部产学研结合资助项目(2011A 090200077);西华大学重点实验室开放研究基金资助项目(S Z J J 2012-037)作者简介:刘明春(1987 ),男,博士生,E -m a i l :l i u m i n g c h u n 23@163.c o m.通信作者:张承宁(1963 ),男,教授,博士生导师,E -m a i l :m r z h c n @b i t .e d u .c n .第34卷 第2期2014年2月北京理工大学学报T r a n s a c t i o n s o fB e i j i n g I n s t i t u t e o fT e c h n o l o g yV o l .34 N o .2F e b .20148ˑ8轮毂电机全轮驱动车辆动力学建模与仿真刘明春, 张承宁, 王志福(北京理工大学电动车辆国家工程实验室,北京 100081)摘 要:建立了8ˑ8轮毂电机全轮驱动车辆的整车驾驶模型,该模型包括驾驶员输入处理模块㊁路面条件和22自由度车辆动力学模型,给出了在一定路面条件下,从驾驶员输入到车辆动力学和运动学状态输出的数学方程.采用模块化的方法,在M a t l a b /S i m u l i n k 中建立了计算机仿真模型,对所建立的模型进行了操纵稳定性和行驶平顺性的仿真试验,并与常规8ˑ8车辆模型及二自由度线性模型进行了对比分析.仿真结果表明所建立的模型能正确反映车辆在各种工况下的动力学特性,非簧载质量的增加一定程度上降低了车辆的操纵稳定性,尤其降低了车辆的行驶平顺性.关键词:轮毂电机;全轮驱动;动力学模型;计算机仿真中图分类号:U461.1 文献标志码:A 文章编号:1001-0645(2014)02-0143-05D y n a m i c sM o d e l i n g an dS i m u l a t i o no nF o u r -A x l e V e h i c l eD r i v e nb y In -W h e e lM o t o r s L I U M i n g -c h u n , Z H A N GC h e n g -n i n g , WA N GZ h i -f u (N a t i o n a l E ng i n e e r i n g L a b o r a t o r y f o rE l e c t r i cV ehi c l e s ,B e ij i n g I n s t i t u t e o fT e c h n o l o g y ,B e i j i n g 100081,C h i n a )A b s t r a c t :A d y n a m i c m o d e l ,i n c l u d i n g t h ed r i v e ri n p u t t i n g mo d u l e ,t h er o a d m o d e la n dt h e v e h i c l em o d e lw i t h22d e g r e e s o f f r e e d o m (D O F s ),w a s p r o p o s e d f o r t h e f o u r -a x l e v e h i c l e d r i v e nb y i n -w h e e lm o t o r s .T h e 22D O F s ,w h ic h r e p r e s e n t ed t he d y n a m i c c h a r a c t e r i s t i c s of t h e v e h i c l e ,w e r e c o n s i s t e do f 6D O F s o f t h e v e h i c l eb o d y a n d 16D O F s o f t h e v e r t i c a l a n d r o t a t i o nm o t i o no f 8w h e e l s .B a s e do nt h ed e d u c e de q u a t i o n s ,ac o m p u t e rs i m u l a t i o n m o d e lw a se s t a b l i s h e d w i t h h igh l y m o d u l a ra p p r o a c hi n M a t l a b /S i m u l i n k s o f t w a r e .T h es i m u l a t i o nt e s t s ,i n c l u d i n g th e h a n d l i n g s t a b i l i t y a n d t h e r i d i n g co m f o r t ,w e r e p e r f o r m e do nt h e22D O F sm o d e l a n dt h e i d e a l 2D O F s l i n e a r v e h i c l em o d e l u n d e r t h e s a m e d r i v i n g c o n d i t i o n .T h e s i m u l a t i o n r e s u l t s r e v e a l t h a t t h e p r o p o s e d m o d e li s a b l et ol e g i t i m a t e l y d e s c r i b et h e d yn a m i c c h a r a c t e r i s t i c si n v a r i o u s c o n d i t i o n s .W h a t sm o r e ,t h e d y n a m i c c h a r a c t e r i s t i c s ,e s p e c i a l l y r i d i n g co m f o r t ,a r e d e t e r i o r a t e d b e c a u s e o f t h e i n c r e a s e du n s p r u n g ma s s .K e y w o r d s :i n -w h e e lm o t o r ;a l l -w h e e l d r i v e ;d y n a m i c sm o d e l ;c o m p u t e r s i m u l a t i o n 与传动内燃机汽车和单电机驱动电动汽车相比,轮毂电机驱动车辆具有独特的结构和布置方式[1].目前国内外关于轮毂电机驱动技术的研究对象主要是四轮车辆,将该技术应用于八轮车辆,国外已经开发出了成型的试验平台[2],因此开展多轮车辆轮毂电机驱动技术研究,具有重要的预研意义.传统多轴轮式车辆的动力学研究中,提出了动力学模型,包括简化的数学模型和复杂的多体动力学模型.这些模型多侧重于多轴转向控制及驱动力分流控制,并不能全面描述车辆行驶过程中的各种动力学特性[34].本文从8ˑ8轮毂电机全轮驱动车辆的整体结构出发,建立了以驾驶员操作为输入㊁以车辆动力学参数为输出的多自由度非线性车辆驾驶模型,利用M a t l a b /S i m u l i n k 进行了仿真分析.1 系统动力学方程建立的车辆驾驶模型总体结构如图1所示.输入为驾驶员操作信号和路面条件,输出车辆状态参数.在建模过程中,参考四轮车辆的动力学方程[5],并根据八轮车辆的结构特点,建立适用于后者的动力学模型图1 车辆驾驶模型整体结构F i g .1 I n t e g r a l s t r u c t u r e o f v e h i c l e d r i v i n g mo d el F i g .2 V e h i c l e d yn a m i cm o d e l 1.1 22自由度车辆动力学方程如图2所示,车辆坐标系x y z -O 以整车质心铅垂线与车辆侧倾轴的交点为原点,x 轴平行于地面指向前进方向,y 轴指向驾驶员的右侧,z 轴通过质心指向下方,假设车辆关于x O z 平面对称,Oᶄ是车辆的瞬时转向中心.模型有22个自由度:整车纵向㊁侧向和横摆运动个自由度;车身垂向㊁侧倾和俯仰运动3个自由度;8个车轮旋转和垂向运动16个自由度.在下列方程中,用下标i ㊁j 对轮胎进行指定:i (i =1,2,3,4)表示第i 根轴;j =1表示左轮,j =2表示右轮.1.1.1 整车动力学方程(车辆坐标系)m (̇v x +q v z -r v y )=ð4i =1ð2j =1F x i j -mg s i n α-12C D A f ρa v 2x -m g f r c o s α,(1)m (̇v y +r v x -p v z )=ð4i =1ð2j =1F y i j ,(2)I z ̇r -(I x -I y )p q =12d B ð4i =1F x i 1-ð4i =1F x i ()2+ð2i =1[L i(F yi 1+F y i 2)]-ð4i =3[L i (F y i 1+F yi 2)]+ð4i =1ð2j =1Tz i j,(3)m s (̇v z +p v y -q v x )=ð4i =1ð2j =1F z s i ,(4)I x s ̇p -(I y s -I z s )q r =ð4i =1ð2j =1F z s i j +ms g h ᶄs i n φ,(5)I ys ̇q -I z s -I x ()s p r =-ð2i =1L i F z s i 1+F z s i ()[]2+ð4i =3L iFz s i 1+F z s i ()[]2+m sg h ᶄs i n θ.(6)式中:轮胎力F x i j =F x w i j c o s δi j -F y w i j s i n δi j ;F y i j =F x w i j s i n δi j +F y w i j c o s δi j ;δ为转角值;T z 为回正力矩;v x ,v y ,v z 为纵向㊁侧向和垂向运动速度;p ,q ,r 为侧倾㊁俯仰和横摆角速度;m 为整车质量;m s 为簧载质量;C D 为空气阻力系数;A f 为迎风面积;ρa 为空气密度;α为爬坡度;f r 为滚动阻力系数;I x ,I y 和I z 为整车关于x ,y ,z 轴的惯量;I x s ,I y s 和I z s 为车身关于x ,y ,z 轴的惯量;d B 是轮距;L i 为第i 轴至质心的水平距离;F z s 为悬架对车身的垂向力;h ᶄ为侧倾轴高度;φ,θ为侧倾角和俯仰角.1.1.2 车轮动力学方程(轮胎坐标系)I w i j ̇ωw i j =T d i j -T b i j -(F x w i j +F z w i jf r )R w ,(7)m w ̇v z w i j =K w (Z r i j -Z w i j )+C w (v r i j -v z w i j )-F z s i j .(8)式中:F z w 为车轮所受垂直负载;I w 和R w 为车轮沿转动轴的转动惯量和车轮半径;m w 为电动轮质量;ωw 为车轮转动角速度;T d 和T b 为车轮的驱动力矩441北京理工大学学报第34卷和制动力矩;Z w 和v z w 为车轮垂向的位移和速度;Z r和v r 为路面不平度及其变化率;K w 和C w 是轮胎垂向刚度和阻尼.1.1.3 悬架力及车轮负载以车辆静平衡为参考状态,该状态下,各轴的垂直负载F 0z s i 和各轮的垂直负载F 0z w i j 为F 0z s i =L 2b -L a L 1-(L a -4L 1)(L 1-L i )4L 2b -L 2am s g ,(9)F 0z w i j =12F 0z s i +m w g .(10)式中:L a =ð4i =1(L 1∓L i ),L 2b=ð4i =1(L 1∓L i )2;i =1,2取减,i =3,4取加.车辆垂向运动时,悬架和轮胎系统简化为如图3所示,其中Z s ㊁Z w 和Z r 分别是车身㊁车轮和地面相对于静平衡时的垂向位移,K s 和C s 是悬架的刚度和阻尼.图3 垂向振动模型F i g.3 V e r t i c a l v i b r a t i o n悬架相对静平衡状态的附加变形力F z s i j 为F z s i j =K s i j Z w i j -Z s -(-1)2j d B s i n φʃL i s i n éëêêùûúúθ+C s i j v z w i j -v z -(-1)2j d B p s i n φʃL i q s i n éëêêùûúúθ.(11)式中:i =1,2取减号,i =3,4取加号;得到车辆运动过程中,车轮的垂直负载F z w i j 为F z w i j =F 0z w i j +F z s i j .(12)1.1.4 车轮侧偏角和滑移率轮心在车辆坐标系下,纵向速度v x i j 和侧向速度v y i j 分别为v x i j =v x -(-1)2j d B r ,v y i j =v y ʃLi r .(13)式中的变运算符号对于前两轴取减号,对于后两轴取加号.车轮侧偏角αi j 为αi j =δi j -a r c t a n (v y i j /v x i j ).(14)在轮胎坐标系下,轮心的纵向速度v x w i j 及车轮的滑移率λi j 为v x w i j =v x i j c o s δi j +v y i j s i n δi j ,λi j =ωi j R w -v x w i j m a x (ωi j R w ,v x w i j )ìîíïïï.(15)1.1.5 轮胎模型采用应用范围广泛的魔术公式轮胎模型[6]:F y (x )=D s i n {C a r c t a n [B x 1-E (B x 1-a r c t a n B x 1)]},(16)F Y (x )=G (x 1)y (x 1)+S h ;x 1=x 2+S v .(17)式中:F y (x )为纯纵滑或纯侧偏工况下轮胎的纵向力或侧向力;F Y (x )为联合工况下轮胎的纵向力或侧向力;G (x )为联合工况下关于滑移率和侧偏角的权函数;x 1为组合自变量;x 2为滑移率或侧偏角;S v 为曲线垂向偏移;S h 为曲线水平偏移.1.2 转角信号处理模块八轮车辆双前桥转向时,其瞬时转向中心相对于后两轴的中线向后偏移一定距离d C ,如图2所示.文献[7]指出,在车速不大,且车轮未发生侧滑的情况下,d C 由双前桥的转向角及各轴与质心的距离决定.该模块的输入是前轴内转向轮的转角δ12,其他三轮的转角为δ22=a r c t a n L 2+L 4-d C L 1+L 4-d C t a n δæèçöø÷12,(18)δ11=a r c c o t d B L 1+L 4-d C +c o t δæèçöø÷12,(19)δ21=a r c c o t d B +(L 1+L 4-d C )c o t δ12L 2+L 4-d éëêêùûúúC .(20)1.3 驱动信号处理模块根据车辆静平衡时各车轮所受的垂直负载来分配电机的驱动信号,即a i j =F 0z w i ja /(m g )(21)式中:F 0z w i j 为前述车轮在静平衡时受的垂直负载;a 为驾驶员施加的总驱动信号.1.4 驱动电机模型电机模型的作用是根据输入的驱动信号和转子转速信号,输出相应的驱动转矩,电机精确的数学模型并不是重点.文中根据已知的轮毂电机外特性参数,利用参数拟合的方法,建立电机的数据查表模型为T e i j =f (a i j ,n i j ),电机传递到车轮的力矩为T d i j =T e i j t i .其中,a i j 为分配给电机的驱动信号大小;n i j 为电机转子的转速,在整车模型中通过车速541第2期刘明春等:8ˑ8轮毂电机全轮驱动车辆动力学建模与仿真换算而来,然后反馈到电机模型中;t i 为行星减速器的减速比.1.5 随机路面不平度时域模型根据汽车理论,时间频率下路面速度功率谱密度的幅值在整个频率范围内为一常数,即为一 白噪声 ,其幅值大小只与不平度系数和车速有关.取频率指数W =2,可以表示为G ̇q (f )=4π2G q (n 0)n 20u .(22)式中:G q (n 0)为参考空间频率n 0下的路面不平度系数.将式(22)表示的白噪声转换成有色噪声,得到时域路面不平度的连续状态方程表达式为̇X =-2πf 0X +2πn 0G q (n 0)u U ,Y =X {.(23)式中:X =q (t )为随机路面不平度幅值;f 0为滤波器的下限截止频率;U 为均值为0,强度为1的均匀分布单位白噪声.2 模型仿真验证利用M a t l a b /S i m u l i n k 建立8ˑ8轮毂电机全轮驱动车辆的动力学仿真模型A ,模型中整车质量为18t ,簧载质量为13.7t ,1㊁2㊁3㊁4轴至质心的距离分别为2.32,0.9,1.1,2.52m ,轮距为2.6m ,整车质心高度为1m ,整车绕z 轴的转动惯量为84748k g ㊃m 2,电动轮质量为400k g.为了说明非簧载质量的增加对轮毂电机驱动车辆性能的影响,根据上述方程又建立了常规8ˑ8车辆的22自由度非线性模型B ,模型B 的参数与模型A 基本一致,但簧上㊁簧下质量按常规车辆分配.在M a t l a b /S i m u l i n k 中对它们进行了操纵稳定性和行驶平顺性的仿真验证,在以下仿真中,轮毂电机驱动车辆为模型A ,常规车辆为模型B .2.1 转向角阶跃输入仿真为了验证非线性模型的正确性,本文采用文献[4]中的方法建立了四轴车辆的2自由度线性模型.通过输入驱动踏板信号,分别使车辆加速到8.33m /s (即30k m /h )㊁22.22m /s (即80k m /h ),给前轴内转向轮输入0.1r a d 角阶跃信号,记录转向轮转角㊁横摆角速度㊁侧向加速度和质心侧偏角,如图4所示.从仿真结果可以看出,转角计算模块将驾驶员的转角信号转化为4个转向轮的转角,以满足轮转角关系.在低速工况下,所建立的两个非线性模型与线性模型的响应特性较为接近,这是因为在低速图4 转向角阶跃输入仿真结果F i g .4 S i m u l a t i o n r e s u l t s o f s t e p s t e e r i n g时,车轮的侧偏角不大,侧偏特性仍处于线性范围.而在高速情况下,两个非线性模型与线性模型相比,响应特性有本质的区别,这是由于高速时,车轮的侧偏特性进入非线性区,线性模型失效,非线性模型才641北京理工大学学报第34卷能反映车辆的运动状态.进一步比较两个非线性模型,与常规车辆相比,轮毂电机车辆的动态响应特性不佳,主要表现为响应时间和稳定时间较长;但两者的稳态响应较为接近.说明车辆对驾驶员的指令响应较慢,非簧载质量的增加降低了车辆的动态性能,一定程度上恶化了操纵稳定性,因此需要加入相应的控制策略来进行改善.可见所建立的模型能较好地反映车辆的瞬态和稳态的动力学特性,并能作为车辆操纵稳定性控制策略的控制对象.2.2随机路面不平度输入仿真随机路面输入试验是评定汽车平顺性的重要试验,可以反映车辆在不平路面行驶时的响应特性.本文使两个非线性模型以8.33m/s和22.22m/s 的速度行驶于C级路面.对所记录的加速度时域响应进行频谱分析,得到加速度功率谱,如图5所示.图5车身垂向加速度频谱分析结果F i g.5 S p e c t r u ma n a l y s i s o nv e r t i c a l a c c e l e r a t i o n从图5可以看出,与常规车辆相比,轮毂电机车辆的垂向加速度要大,在高速时尤为明显;而且轮毂电机车辆的车身共振频率和车轮共振频率的值更为接近,容易引起车身和车轮振动时的相互干涉,明显降低车辆的平顺性,因此需要通过悬架优化设计和控制技术来进行改善.3结论从8ˑ8轮毂电机全轮驱动车辆的整体结构出发,建立了包括驾驶员输入㊁路面条件㊁和车辆动力学模型在内的车辆驾驶模型.对模型进行了操纵稳定性和行驶平顺性的仿真试验,并与常规八轮车辆模型以及二自由度线性模型的仿真结果进行比较.试验结果表明所建立的模型能够正确反映各个工况下车辆的动力学相应特性;而且非簧载质量的增加一定程度上降低了车辆的操纵稳定性,而对车辆行驶平顺性的影响尤为明显.参考文献:[1]W a t t s A,V a l l a n c e A,W h i t e h e a d A.T h et e c h n o l o g ya n d e c o n o m i c s o f i n-w h e e lm o t o r[J].S A EI n t e r n a t i o n a l J o u r n a lo f P a s s e n g e r C a r s,E l e c t r o n i c a n d E l e c t r i c a l S y s t e m s,2010,3(2):3754.[2]何锡舟.内部革命:战车电传动[J].海陆空天惯性世界, 2004(7):2831.H eX i z h o u.I n t e r n a lr e v o l u t i o n:e l e c t r i cd r i v e nc h a r i o t[J].N A A S,2004(7):2831.(i nC h i n e s e) [3]杨铭.基于主动转向和横摆力矩控制的多轴车辆制动稳定性研究[D].长春:吉林大学,2011.Y a n g M i n g.R e s e a r c ho nb r a k i n g s t a b i l i t y o fm u l t i-a x l e v e h i c l e b a s e d o n a c t i v e s t e e r i n g a n d y a w m o m e n t c o m b i n a t i o nc o n t r o lm e t h o d[D].C h a n g c h u n:J i l i nU n i-v e r s i t y,2011.(i nC h i n e s e)[4]W i l l i a m sD E.G e n e r a l i s e d m u l t i-a x l ev e h i c l eh a n d l i n g[J].V e h i c l e S y s t e m D y n a m i c s,2012,50(1):149166.[5]郭孔辉.汽车操纵动力学原理[M].3版.南京:江苏科学技术出版社,2011.G u oK o n g h u i.T h e t h e o r y o f v e h i c l eh a n d l i n g d y n a m i c s[M].3r de d.N a n j i n g:J i a n g s uS c i e n c e a n dT e c h n o l o g y P r e s s,2011.(i nC h i n e s e)[6]B a k k e rE,N y b o r g L,P e c e j k aH B.T y r em o d e l i n g f o ru s e i n v e h i c l e d y n a m i c s s t u d i e s,S A E p a p e r870421[R].D e t r o i t,U S A:S A E,1987.[7]毛务本,耿坤龙,刁锦桥,等.双前桥转向系统瞬时转动中心理论分析及二轴转角的确定[J].汽车技术, 2006(8):810.M a o W u b e n,G e n g K u n l o n g,D i a oJ i n q i a o,e ta l.I n-s t a n t a n e o u s t u r n i n g c e n t e r t h e o r y a n a l y s i s a n d t h e s e c o n da x l e s t e e r i n g a n g l e c a l c u l a t i o no f d u a l-f r o n t a x l e s t e e r i n g s y s t e m[J].A u t o m o b i l eT e c h n o l o g y,2006(8): 810.(i nC h i n e s e)(责任编辑:孙竹凤)741第2期刘明春等:8ˑ8轮毂电机全轮驱动车辆动力学建模与仿真。
智能化交通系统的建模与仿真研究第一章引言随着城市化进程的加快和交通需求的不断增加,传统交通管理方式已经难以满足人们的出行需求。
智能化交通系统作为一种新型的交通管理方式,通过引入先进的信息技术和智能算法,为交通系统提供了更高效、安全和便利的服务。
在智能化交通系统中,建模与仿真技术的应用成为关键,可以帮助我们理解交通系统的运行规律,优化系统设计,提高交通系统的运行效能。
第二章智能化交通系统的建模2.1 交通流建模交通流是交通系统中最基本的要素之一,合理地建模交通流对系统的优化设计是非常重要的。
传统的交通流建模方法包括流量-密度关系模型、流量-速度关系模型和密度-速度关系模型等,这些模型可以帮助我们描述交通流的基本特征与规律。
2.2 车辆行为建模车辆行为是交通系统中不可忽视的要素之一,合理地建模车辆行为可以帮助我们理解驾驶员的决策过程和行为特征。
传统的车辆行为建模方法包括驾驶员动态决策模型、行车路径选择模型和车辆加速度模型等,这些模型可以帮助我们预测车辆的行驶轨迹和交通流的变化趋势。
2.3 交通设施建模交通设施是交通系统中的重要组成部分,合理地建模交通设施可以帮助我们优化交通网络的设计和布局。
传统的交通设施建模方法包括道路网络模型、交通信号灯模型和交通设施需求模型等,这些模型可以帮助我们评估交通设施的供需关系和提出相应的优化方案。
第三章智能化交通系统的仿真3.1 仿真模型与数据为了对智能化交通系统进行全面的仿真研究,我们需要构建准确的仿真模型和收集可靠的仿真数据。
仿真模型包括交通流模型、车辆行为模型和交通设施模型等,这些模型可以帮助我们精确地模拟真实交通系统的运行情况。
仿真数据包括道路交通流量数据、车辆行为数据和交通设施状态数据等,这些数据可以用于验证仿真模型的准确性和性能。
3.2 仿真平台与工具在智能化交通系统的仿真研究中,选择合适的仿真平台和工具是非常重要的。
目前,常用的交通仿真平台有VISSIM、SUMO和TRANSIMS等,这些平台可以提供全面的交通仿真功能和强大的模型构建能力。