车身控制系统-总线系统
- 格式:doc
- 大小:355.00 KB
- 文档页数:10
车身电控系统的组成车身电控系统是现代汽车中不可或缺的一部分,它由多个组成部分组成,包括传感器、控制器、执行器等。
这些部件协同工作,以确保车辆的安全性、性能和舒适性。
本文将详细介绍车身电控系统的组成。
1. 传感器传感器是车身电控系统的重要组成部分,它们用于监测车辆的各种参数,例如车速、转向角度、油门位置、刹车压力、气囊状态等。
这些传感器将收集到的数据传输给控制器,以便控制器能够根据车辆的状态做出相应的决策。
2. 控制器控制器是车身电控系统的大脑,它接收传感器传来的数据,并根据预设的算法和逻辑进行计算和分析,最终控制车辆的各种功能。
例如,当传感器检测到车速过快时,控制器会自动减速以确保车辆的安全性。
3. 执行器执行器是车身电控系统的执行部分,它们根据控制器的指令执行相应的操作。
例如,当控制器决定要减速时,执行器会控制刹车系统减速。
执行器还包括发动机控制单元、变速器控制单元等,它们控制着发动机和变速器的工作状态,以确保车辆的性能和燃油经济性。
4. 通信总线通信总线是车身电控系统中的重要组成部分,它将传感器、控制器和执行器连接在一起,以便它们之间能够进行数据交换和通信。
通信总线还可以将车辆的数据传输到车载信息娱乐系统中,以便驾驶员能够了解车辆的状态和性能。
5. 电源系统电源系统是车身电控系统的能量来源,它提供电力给传感器、控制器和执行器等组件。
电源系统还包括电池、发电机和稳压器等部件,以确保车辆的电力供应稳定和可靠。
6. 诊断系统诊断系统是车身电控系统的监测和维护部分,它能够检测车辆的故障和问题,并提供相应的解决方案。
诊断系统还可以记录车辆的运行数据和故障码,以便技术人员进行故障排除和维修。
车身电控系统是现代汽车中不可或缺的一部分,它由多个组成部分组成,包括传感器、控制器、执行器、通信总线、电源系统和诊断系统等。
这些部件协同工作,以确保车辆的安全性、性能和舒适性。
随着汽车技术的不断发展,车身电控系统也将不断升级和改进,以满足人们对汽车的更高要求。
CAV总线系统名词解释引言C A V(Co nn ec te da nd A ut on om ou sV eh icl e s)总线系统是一种用于连接智能汽车各个部件和系统的通信架构。
通过CA V总线系统,车辆内部的各个电子控制单元(E CU)可以相互通信,实现信息传输和功能协调。
本文将对CA V总线系统中常见的名词进行解释,以帮助读者更好地理解相关概念。
名词解释1.C A V总线系统C A V总线系统指的是用于智能汽车内部各个部件和系统之间进行通信和数据传输的一种架构。
它采用总线的结构,通过一根主线连接各个EC U,实现数据的交换和共享,为智能驾驶、车载娱乐、车身安全等功能提供支持。
2.E C UE C U(El ec tr on ic Co n tr ol Un it)是指智能汽车中的电子控制单元,它是车辆的大脑之一,负责监测、控制和调节车辆的各个系统。
例如发动机控制单元、制动控制单元、安全气囊控制单元等都属于E CU的范畴。
3.数据总线数据总线是C AV总线系统中的一部分,用于在不同E CU之间传输数据和信息。
它一般分为高速数据总线和低速数据总线两种类型。
高速数据总线主要用于传输速度要求较高的数据,例如视频信号和传感器数据等;低速数据总线主要用于传输控制信号和一些较低速率的数据。
4.控制器局域网(C A N)控制器局域网(C ont r ol le rA re aN et wor k,简称C AN)是一种应用于实时控制系统的串行总线通信协议,常用于汽车领域。
它具有高可靠性、实时性强、传输距离远等特点,适用于连接E CU进行实时数据交换和控制。
5.以太网以太网是一种广泛应用于计算机网络领域的局域网技术,也被用于智能汽车中的数据通信。
通过以太网,各个E CU可以以高带宽、低延迟的方式进行数据传输,支持复杂的车载应用和服务。
6.F l e x R a yF l ex Ra y是一种用于实时数据传输的串行总线标准,主要用于高带宽和实时性要求较高的系统。
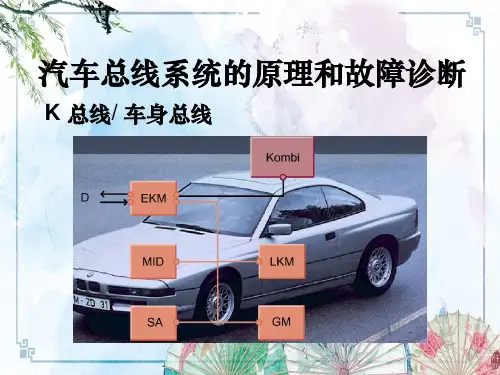

汽车车身CAN总线系统设计作者:郝魁孙华伟腾彦飞来源:《科技与创新》2014年第07期摘要:随着现代汽车电子技术的发展与广泛应用,汽车车身的电子设备越来越多,各部分通信控制之间更为复杂。
传统电器之间的连接使用点对点方式的单一通信,而使用CAN总线技术使车身电控系统之间的连接更加智能化。
车身使用的是低速的CAN总线网络,对于车身整体控制性要求较低。
车身控制一般包括对门锁、前后视镜、天窗、室内空调等的控制。
关键词:汽车;车身控制;CAN总线;电子技术中图分类号:U469.11 文献标识码:A 文章编号:2095-6835(2014)07-0001-02CAN总线技术主要应用于动力系统子网和车身系统子网,我们研究的车身网络控制属于低速CAN网络。
随着CAN总线技术的广泛应用,其开发流程与方法成为了研究的重点。
基于CAN总线技术的车身控制代替了车身点对点的复杂连接,使用CAN总线式网络拓扑形式,将车身各个控制节点连接,利用软件实现对车身网络节点的综合控制。
1 汽车网络总线开发流程CAN总线技术在车身的广泛应用,使人们更加关注CAN总线的整体开发流程。
车身CAN总线网络的开发流程主要包括系统整体设计和具体实现方法。
系统整体网络设计包括了所有要遵循的设计方法。
使用网络拓扑形式的设计方法时,首先要分析CAN总线的系统功能要求、整体结构的设计与仿真,制订符合CAN总线要求的通信与控制协议,这样才能为供货商提供整车ECU节点设计(包括软件节点、硬件节点、软件与硬件结合节点的系统集成),完成CAN总线的验证与仿真。
具体实现方法包括实现这些功能所需要的硬件和软件的选型与设计。
2 车身CAN总线系统的拓扑结构设计车身网络系统拓扑结构主要包括中央控制器、左右前后车门控制器、车内空调控制器、前后座控制器等,这些控制器都挂接在CAN总线上。
这里我们选择中央控制模块进行研究。
车身网络控制选择的是低速通信,因此传输波特率选择50 kb/s作为CAN总线的通信速率。
【关键词】BCM CAN总线汽车电子车身控制系统【英文关键词】BCM CAN bus Automotive electronic Body control systemBCM论文:经济型轿车车身控制系统设计【中文摘要】随着人们生活水平日益提高,轿车尤其是经济型轿车开始进入平常百姓的生活中。
车身控制系统作为汽车上重要部件之一,对汽车的安全性、舒适性、便捷性有重要的影响。
为了提高和促进国产经济型轿车车身控制系统的水平,本文从车身控制系统基本原理出发,对系统的硬件构成,核心元器件的选择,底层驱动,SCADE逻辑功能代码设计,CAN通讯设计进行了分析与讨论。
在此基础上,设计了带CAN总线的经济型轿车车身控制系统。
目前这套系统已经安装在华泰B11的实验车上,进行了相关的调试和实验工作。
满足了当初的设计要求,并且减少了车身内的线束。
同时针对当前汽车电子的软件设计提出了改进,将SCADE应用于汽车电子实际工程之中,缩短了项开发时间,降低了开发成本,并且提高了代码的可靠性与可维护性。
实验和实际工作经验表明,基于CAN总线的车身控制系统将会逐渐的应用于经济型轿车之中。
此类车身控制系统具有可靠性高、通信实时性好、连接方便等显著优点,对进一步提高国产自主轿车车身控制系统理论研究具有重要意义。
【英文摘要】Along with the rising living standard of thepeople, the cars especially the economy cars began to enter the lives of ordinary people. Body control modular(BCM) as an part of the vehicle has important influence on the vehicle safety, comfort and convenience. In order to improve and promote domestic economic type of car body control system level, this paper analyzes and discusses the hardware structure of the system, selection of core components, the design of SCADE logic function code and CAN communication from the principle of the body control system. Based on this, the paper designs an economy car’s BCM with CAN bus. Now, this BCM has been already assembled in HUATAI B11experimental vehicle. The related experiences and tests have been completed. We come to the conclusion that the BCM designed in this paper meets the design requirements.Also, the wire harness is reduced effectively. Furthermore this design puts forward the improvement measures by using SCADE software in view of the current automotive electronics software design. Therefore, the project development time is shortened and the reliability and maintainability of the code is improved.According to the good performance, the distributed BCM based on CAN bus will be gradually applied in economy car. This type of BCM has the advantages of high reliability, real time communication, convenient connection and so on. It mayhave important significance in improving the domestic independent BCM research level. Keywords:BCM, CAN bus, Automotive electronic, Body control system【目录】经济型轿车车身控制系统设计摘要5-6Abstract6第一章绪论7-111.1 课题研究背景7-81.2 国内外研究现状8-91.3 课题的研究内容和创新点9-11第二章车身控制系统硬件设计11-322.1 需求方案制定11-162.1.1 灯光系统功能12-132.1.2 后视镜功能132.1.3 中控功能13-142.1.4 车窗升降功能142.1.5 遥控设防14-162.2 硬件系统设计16-272.2.1 MCU元器件选型16-172.2.2 MCU及周边电路设计17-182.2.3 输入和信号采集电路18-202.2.4 驱动输出和保护电路设计20-222.2.5 诊断电路设计22-232.2.6 电源电路设计232.2.7 遥控门禁系统设计23-272.3 电动车窗防夹27-302.3.1 防夹区域和防夹力的定义272.3.2 防夹功能设计27-302.4 硬件可靠性设计30-312.5 本章小结31-32第三章CAN总线原理与通信设计32-443.1 汽车网络分类323.2 CAN协议的基本定义与分层结构32-343.2.1 物理层333.2.2 数据链路层33-343.3 帧类型和帧结构34-363.4 CAN总线的拓扑结构36-383.5 CAN应用层协议设计38-393.6 CAN总线节点软件设计39-433.6.1 CAN 模块的初始化软件设计39-413.6.2 CAN节点的发送程序41-423.6.3 CAN节点接收子程序42-433.7 本章小结43-44第四章车身控制系统软件设计44-644.1 软件开发环境介绍44-454.1.1CodeWarrior6.3444.1.2 SCADE软件44-454.2 BCM软件架构设计45-464.3 BCM各节点底层驱动设计46-524.3.1 设置MCU的工作模式46-474.3.2 系统时基和PWM软件设计47-484.3.3 数据采集软件设计48-504.3.4 电机控制策略设计50-524.4 SCADE逻辑功能设计52-584.4.1 SCADE软件使用与电动车窗模块设计52-554.4.2 电动后视镜软件设计55-574.4.3 状态控制软件设计57-584.5 SCADE实现机制分析58-614.5.1 SCADE代码样例58-604.5.2 代码规模与执行效率60-614.6 软件抗干扰措施61-634.6.1 数字滤波技术61-624.6.2 软件陷阱62-634.6.3 冗余技术634.7 本章总结63-64第五章系统验证与实验64-675.1 BCM软件模拟与测试64-655.2 BCM 模块台架功能测试655.3 BCM EMC及其他性能测试65-665.4 本章总结66-67第六章总结与展望67-68致谢68-69参考文献69-71附录71-75攻读硕士学位期间发表的论文75。
汽车can总线系统原理设计与应用汽车CAN总线系统原理设计与应用一、引言汽车CAN总线系统是现代汽车电子控制系统中的重要组成部分,它采用了一种先进的通信协议,为汽车电子控制单元(ECU)之间提供了高效可靠的数据传输方式。
本文将介绍汽车CAN总线系统的原理设计与应用。
二、汽车CAN总线系统的原理设计1. 总线拓扑结构汽车CAN总线系统采用了总线拓扑结构,即多个ECU通过一根总线进行通信。
这种结构可以有效减少线缆的使用量,降低系统成本,并且具有良好的可扩展性。
2. CAN通信协议汽车CAN总线系统采用了CAN通信协议,它是一种基于事件驱动的通信协议。
CAN总线上的每个ECU都有一个唯一的标识符,用于区分不同的节点。
当一个节点有数据需要发送时,它会将数据发送到总线上,并附带自己的标识符。
其他节点会监听总线上的数据,当收到符合自己标识符的数据时,就会接收并处理。
3. 数据传输汽车CAN总线系统采用了差分传输方式,即数据信号由两个相对电平相反的信号线组成。
这种方式可以有效降低传输过程中的电磁干扰,提高数据传输的可靠性。
4. 容错机制汽车CAN总线系统具有良好的容错机制,当总线上发生错误时,系统能够进行自我修复。
CAN总线采用了循环冗余校验(CRC)技术,可以检测数据传输过程中的错误。
此外,CAN总线还具有冲突检测和错误重传机制,确保数据的可靠传输。
三、汽车CAN总线系统的应用1. 发动机控制系统汽车CAN总线系统在发动机控制系统中发挥着重要作用。
各个传感器和执行器通过CAN总线连接到发动机控制单元(ECU),实现对发动机的监测和控制。
通过CAN总线,发动机控制单元可以获取发动机的工作参数,并根据这些参数进行精确的控制,提高发动机的性能和燃油经济性。
2. 制动系统汽车CAN总线系统在制动系统中也有广泛应用。
刹车踏板的行程传感器、刹车盘温度传感器、刹车液位传感器等信息通过CAN总线传输到制动控制单元(ECU),实现对制动系统的实时监测和控制。
汽车数据总线的名词解释汽车数据总线是指在电子汽车系统中,用于传输各种数据的系统,类似于人体的神经系统。
它通过连接不同的电子控制单元(ECU),使得车辆各系统之间能够相互通信和交换信息。
汽车数据总线的出现使得汽车电子系统更加智能化和集成化,从而提升了汽车性能和安全性。
1. CAN总线(Controller Area Network,控制器局域网)CAN总线是汽车领域最常用的一种数据总线,它具有高可靠性和抗干扰能力。
CAN总线采用串行通信方式,可以同时传输多个控制器的数据,减少了多个控制器之间的连线数量,节省了空间和成本。
CAN总线广泛应用于车身控制、发动机管理、制动系统等重要汽车系统。
2. LIN总线(Local Interconnect Network,局部互联网络)LIN总线是一种低成本、低速率的数据总线,主要用于车内非关键系统的通信。
相较于CAN总线,LIN总线通信速率较慢,但成本更低。
它常被用于控制车辆的悬挂系统、座椅调节、窗户升降等功能。
LIN总线可以通过数据传输,实现对车内多个设备的控制和监控。
3. FlexRay总线FlexRay总线是一种高速数据总线,可用于高度复杂的汽车系统,如车辆稳定性控制和自动驾驶等领域。
FlexRay总线具有高可靠性和带宽,能够实现大规模的实时通信。
它通过采用时间分割多路访问技术(TDMA)和冗余通信,提供了更高的冗余容错能力,保证了车辆系统的可靠性和安全性。
4. MOST总线(Media Oriented Systems Transport,介质导向系统传输)MOST总线是一种用于车载多媒体通信的高速光纤总线,主要用于音频、视频和数据的传输。
它支持高速传输,确保了音视频信号的高质量传输。
MOST总线广泛应用于车载导航、音响系统、后座娱乐系统等多媒体设备。
5. Ethernet总线以太网总线是一种在汽车电子系统中越来越常见的数据总线。
由于其高带宽和广泛应用的特点,以太网总线被用于实现车辆内部各个子系统(如传感器、驾驶员辅助系统等)之间的高速数据交换。
班级:姓名:学号:评定:
班级:
姓名: 学号: 评定:
学习项目单
班级:
姓名: 学号: 评定:
)CAN-H对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-H与CAN-L互短模式下CAN波形图采集与绘制(注意周期、幅值标注)
)CAN-L对地短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-L对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注)
3.LIN线正常工作模式下波形图采集与绘制(注意周期、幅值标注)
线工作模式下波形图采集与绘制(注意周期、幅值标注)
学习项目单
班级:
姓名: 学号: 评定:。