线性空间和欧式空间
- 格式:doc
- 大小:623.50 KB
- 文档页数:10
欧式空间的定义----9af74e36-7160-11ec-a302-7cb59b590d7d简介编辑编辑欧式空间一般指欧几里德空间欧氏空间是一个特别的度量空间,它使得我们能够对其的拓扑性质,在包含了欧氏几何和非欧几何的流形的定义上发挥了作用。
大约公元前300年,古希腊数学家欧几里德建立了空间中角度和距离之间关系的定律,现在称为欧几里德几何。
欧几里德首先发展了“平面几何”,以处理平面上的二维物体。
然后他分析了三维物体的“三维几何”。
所有欧几里德公理都被安排到一个抽象的数学空间,称为二维或三维欧几里德空间。
这些数学空间可以被扩展来应用于任何有限维度,而这种空间叫做 n 维欧几里得空间(甚至简称 n维空间)或有限维实内积空间。
这些数学空间也可以推广到任意维的情况,称为实内积空间(不一定完全),希尔伯特空间在高等代数教科书中也被称为欧几里德空间。
为了发展高维欧几里德空间,空间的性质必须严格表达并扩展到任意维。
虽然这样做的结果是数学非常抽象,但它抓住了欧几里德空间的基本本质,即平面性。
还有其他类型的空间,比如球面非欧几里德空间,相对论中描述的四维时空在重力出现时不是欧几里德空间。
有一种方法论把欧几里得平面看作满足可依据距离和角表达的特定联系的点所成的集合。
其一是平移,它意味着移动这个平面就使得所有点都以相同方向移动相同距离。
其二是关于在这个平面中固定点的旋转,其中在平面上的所有点关于这个固定点旋转相同的角度。
欧几里得几何的一个基本原则是,如果通过一序列的平移和旋转可以把一个图形变换成另一个图形,平面的两个图形(也就是子集)应被认为是等价的(全等)。
(参见欧几里得群)。
欧几里德空间的最后一个问题是,从技术上讲,它不是一个向量空间,而是一个向量空间作用的仿射空间。
直觉上,区别在于,对于原点应该在这个空间中的什么位置,没有标准的选择,因为它可以移动到任何地方。
这项技术在本文中基本上被忽略了。
欧几里德空间(euclideanspace),简称为欧氏空间(也可以称为平直空间),在数学中是对欧几里德所研究的2维和3维空间的一般化。
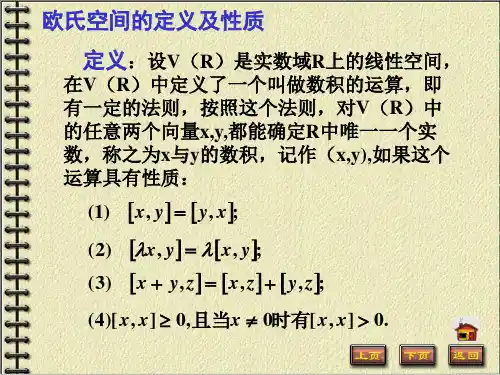
欧氏空间(Euler space )一、 内积与欧氏空间1.设V 是实数域R 上的线性空间,在V 上定义一个二元实函数,称为内积,记为),(βα,它具有以下性质: )3(,)2(),,(),)(1( αββα= 这样的线性空间V 称为欧几里的空间,简称欧氏空间.2.设V 是数域P 上的线性空间,如果V 中的任意两个向量βα,都按某一法则对应P 内唯一确定的数,记为),(βαf ,且),(),(),(,,,,)1(221122112121βαβαβααβααk f k k k f V P k k +=+∈∈∀有;),(),(),(,,,,)2(221122112121βαβαββαββαl f l l l f V P l l +=+∈∈∀有 则称),(βαf 是V 上的一个双线性函数.3.内积是双线性函数.4.设V 是n 维欧氏空间,n e e e ,,,21 为V 的一组基,V ∈βα,,若n n e x e x e x +++= 2211α; n n e y e y e y +++= 2211β则j i n j ni j i j i n j n i j i y x a y x e e ∑∑∑∑====∆=1111),(),(βα,5.称 )),(()(j i ij e e a A ==为基n e e e ,,,21 的度量矩阵.6. 设n e e e ,,,21 是n 维欧氏空间V 的一组基,,A 是基n e e e ,,,21 下的度量矩阵,则任意V ∈βα,,有AY X '=),(βα.7.度量矩阵必为正定矩阵,且不同基下的度量矩阵是合同的.二、 长度与夹角1。
欧氏空间V 中向量长度 ),(||ααα=;单位化:当||0||0αααα=≠时, 2.欧氏空间中的重要不等式:① Cauchy-Буняковский不等式:对任意向量V ∈βα,有线性相关时等式成立。
,当且仅当βαβαβα|,||||),(|≤。
数学中的空间概念
数学中的空间概念是指用数学语言和方法对空间进行描述和研究的概念。
1. 欧几里得空间(Euclidean space):欧几里得空间是数学中
最基本且最常见的空间概念,它以几何学为基础,通常用笛卡尔坐标系表示。
2. 向量空间(Vector space):向量空间是指一组向量构成的
集合,满足一系列定义的运算规则,常用于向量和矩阵的研究。
3. 坐标空间(Coordinate space):坐标空间是指通过一组坐标系,将点的位置表示为坐标的空间。
常见的坐标空间有二维平面、三维空间等。
4. 线性空间(Linear space):线性空间是指满足特定运算规
则的向量空间,其中向量的加法和数乘满足线性运算的性质。
5. 拓扑空间(Topological space):拓扑空间是指在集合上定
义了一种拓扑结构,用来研究集合中的连通性、收敛性以及极限等性质。
6. 测度空间(Measure space):测度空间是指在集合上定义了一种测度,用来度量集合中的大小或者衡量集合中的某种特性。
7. 平面几何(Plane geometry):平面几何是指研究二维平面
中图形的性质、关系和构造等内容。
8. 立体几何(Solid geometry):立体几何是指研究三维空间
中立体图形的性质、关系和构造等内容。
9. 代数拓扑(Algebraic topology):代数拓扑是将代数学方法
应用于拓扑空间研究的一个分支,研究空间的代数性质和变形等问题。
10. 同调论(Homology theory):同调论是数学中的一个分支,研究空间中的“洞”和“环”等代数特征,用于研究空间的性质和
分类。
常见线性空间与欧式空间的基于标准正交基的求法邹雨情沈阳师范大学摘要:高等代数中的线性空间概念是重要的一个属性,欧式空间的深入理解是认识高等数学的一个重要信息,而且线性空间与欧式空间的维数与正交基的标准是认识空间的基础。
因此,本文在对数域中对线性空间的与欧式空间的方面进行说明,数域P 所起的作用,探讨维数的基于标准正交基的方法与步骤。
关键词:线性空间;欧式空间;正交基;标准;求法一、线性空间与欧式空间(一)线性空间。
线性空间是一个给出法则,在一个设V 的集合中,任意的两个元素且是在非空的几何中V 中有数域P 中的运算,定义是一种加法的运算,与他们对应,同时,对于数域K 任意元素还有一个是乘法的元算,称之为乘积的数量,记为K ,V 就是数域的线性空间,满足交换律、结合律、数的分配律与元的分配律规则。
(二)欧式空间。
线性空间主要运算是加法和数量的乘法的运算,几何问题的空间推广,就要涉及到度量的引入,例如长度、夹角等几何向量性质的特殊的位置,丰富线性空间的内容和方法,内积的广泛为正交的变换概念的性质与对应的特殊矩阵的对称变换正交补空间的某个子空间,实数域上的正交等的结构特征,准确把握施密特的正交组基德基本性质与好处,利用标准的正交基的特性。
二、数域P 的线性空间的作用与角色(一)对空间V 的变换在线性判别的影响。
V 的线性空间的变换主要是加法与数量乘积的运算,如果称A 是同构的映射,线性空间的V 就是同构的空间,在线性空间这一概念上一个线性映射的简单性质的集合,充分必要条件是数域P 的有限线性同构映射的乘积的逆映射,和与只和子空间的最小子空间,交换律以及结合律的包含线性向量组,被扩充以及推广到维数和的基,得到推论,维数之和大于N ,具有非零的公共向量,一定存在等号的成立一个V 的线性子空间U ,相互等价,一个是直和,一个是二元函数的有限线性空间的内积,满足了对称性以及线性空间的R 定义内积,对同一线性空间的连续函数的有实连接构成一个欧几里的空间,显然,这样的长度是向量的长度是零,长度是单位向量,实现了向量的转换在夹角与定义欧式空间的合理性。
![[数学]欧氏空间](https://uimg.taocdn.com/f9e0ae5632687e21af45b307e87101f69e31fb91.webp)
[数学]欧⽒空间
欧⽒空间,即欧⼏⾥得空间(Euclidean Space)。
这⾥,欧⼏⾥得这个定语起源于古希腊时期的欧⼏⾥得⼏何[1],⽽欧⼏⾥得⼏何是指满⾜欧⼏⾥得的5条⼏何公理的⼀维⼆维⼏何。
欧⼏⾥得平⾯⼏何的五条公理(公设)是:
1.从⼀点向另⼀点可以引⼀条直线。
2.任意线段能⽆限延伸成⼀条直线。
3.给定任意线段,可以以其⼀个端点作为圆⼼,该线段作为半径作⼀个圆。
4.所有直⾓都相等。
5.若两条直线都与第三条直线相交,并且在同⼀边的内⾓之和⼩于两个直⾓,则这两条直线在这⼀边必定相交。
直到19世纪,瑞⼠数学家路德维希·施莱夫利(Ludwig Schläfli)把欧⼏⾥得平⾯⼏何发展到了三维和更⾼维的⼏何。
今天,他的⼯作已经被⼴泛接受,以⾄于他的名字都不被⼈们熟知了[2]。
最早在数学上使⽤空间的概念是在古希腊时期,那时的空间就是现实物理世界的⼀个抽象,其性质由欧⼏⾥得平⾯⼏何的⼏条公理引出。
近现代数学⾥,空间是满⾜某些特定条件的集合,数学家⽤这些条件构造了他们想要的结构。
例如,线性空间的⼋条公理就是构造了⼀种可
以“‘直’地放缩,旋转”的集合。
严格的欧⽒空间,是仿射空间的扩展,也就是在上加上内积的概念。
仿射空间可以理解为不指定原点,且有平移变换的线性空间,⽽有了内积,就定义了距离,长度和⾓度,也就有了度量,因此,欧⽒空间可以理解为增加了度量和平移变换的线性空间。
但在⼀般的使⽤场景,我们⼀般说的欧⽒空间是指标准欧⽒空间,也就是指定原点并且坐标轴正交的具有向量内积性质的R n线性空间。
Processing math: 100%。
欧氏空间与线性空间欧氏空间和线性空间是数学中两个重要的概念,它们在不同的领域和应用中发挥着重要的作用。
本文将从定义、性质和应用等方面来探讨欧氏空间和线性空间的相关内容。
一、欧氏空间欧氏空间是指具有内积的实数向量空间。
在欧氏空间中,可以定义向量的长度和向量之间的夹角。
具体而言,对于n维欧氏空间R^n 中的向量x=(x1, x2, ..., xn)和y=(y1, y2, ..., yn),其内积定义为:<x, y> = x1y1 + x2y2 + ... + xnyn而向量的长度定义为:||x|| = sqrt(<x, x>) = sqrt(x1^2 + x2^2 + ... + xn^2)欧氏空间具有一些重要的性质。
例如,欧氏空间中的向量满足三角不等式,即对于任意的向量x和y,有:||x + y|| <= ||x|| + ||y||此外,欧氏空间还满足正交性质,即对于任意的向量x和y,如果它们的内积为零,则称向量x和y是正交的。
欧氏空间的概念在几何学、物理学、统计学等领域中有广泛的应用。
在几何学中,欧氏空间可以用来描述点、线、面等几何对象之间的关系。
在物理学中,欧氏空间可以用来描述空间中的力、速度等物理量。
在统计学中,欧氏空间可以用来度量数据样本之间的相似性。
二、线性空间线性空间是指具有加法和数乘运算的向量空间。
在线性空间中,向量之间的加法满足交换律和结合律,数乘满足分配律和结合律。
具体而言,对于n维线性空间V中的向量x,y和标量a,其加法和数乘定义为:x + y = y + x (交换律)(a + b)x = ax + by (分配律)a(bx) = (ab)x (结合律)线性空间的概念在代数学、数学物理学、计算机科学等领域中有广泛的应用。
在代数学中,线性空间可以用来研究向量和矩阵的性质。
在数学物理学中,线性空间可以用来描述复杂的物理系统。
在计算机科学中,线性空间可以用来处理图像、音频等数据。
欧氏空间的知识点总结一、欧氏空间的基本概念1. 欧氏空间的定义欧氏空间是指具有度量的线性空间,它可以是具有内积的实数线性空间或者复数线性空间。
在欧氏空间中有一种特殊的度量,即欧氏距离。
欧氏距离是指在n维空间中,两点之间的距离d(x, y)定义为:d(x, y) = √((x1-y1)^2 + (x2-y2)^2 + ... + (xn-yn)^2)其中x=(x1, x2, ..., xn)和y=(y1, y2, ..., yn)分别是空间中的两个点。
2. 欧氏空间的维度欧氏空间的维度是指空间中的向量所属的维度数,通常用n表示。
在n维欧氏空间中,一个向量可以用n个实数或复数表示。
例如,在二维欧氏空间中,一个向量可以表示为(x, y)。
在三维空间中,一个向量可以表示为(x, y, z)。
3. 欧氏空间的内积在n维欧氏空间中,可以定义内积的概念。
内积是指两个向量之间的数量积,通常用"a·b"表示。
在欧氏空间中,两个向量a和b的内积定义为:a·b = a1b1 + a2b2 + ... + anbn内积满足交换律、线性性和正定性等性质。
内积可以用来定义向量的长度、夹角和投影等概念,是欧氏空间中重要的工具。
二、欧氏空间的性质和定理1. 欧氏空间的性质欧氏空间具有许多重要的性质,例如:- 距离的非负性:两点之间的距离永远是非负的。
- 距离的对称性:两点之间的距离与它们的顺序无关。
- 三角不等式:两点之间的最短距离加起来不大于第三个点所在的线段的长度。
- 同伦性:欧氏空间是同伦的,即两个点之间总可以找到一条连续的路径相连接。
2. 欧氏空间的定理在欧氏空间中,有许多重要的定理,例如:- 柯西-施瓦茨不等式:对于欧氏空间中的任意两个向量a和b,它们的内积满足|a·b| ≤ ||a|| * ||b||,其中||a||和||b||分别是向量a和b的长度。
- 皮亚诺定理:在欧氏空间中,任意有界闭集都是紧的。
目录1 绪论 (3)1.1 研究目的与研究意义 (3)1.2 研究现状 (3)1.3 研究内容 (3)2 欧式空间简介 (4)2.1 提出背景 (4)2.2 定义与基本性质 (5)2.3 度量矩阵 (8)2.4 标准正交基 (9)2.5 同构 (12)2.6 正交变换 (16)2.7对称变换 (19)3 线性空间简介 (21)3.1 线性空间的概念 (22)3.2 线性变换的定义 (22)3.3 线性变换的性质和运算 (23)3.4 线性变换的矩阵 (24)4 线性空间与欧式空间的对比 (28)4.1 基础域的对比讨论 (28)4.2 运算的对比讨论 (29)4.3 基的对比讨论 (29)4.4 向量坐标的对比讨论 (29)4.5 线性变换的对比讨论 (29)4.6同构的对比讨论 (30)参考文献 (31)致谢 (32)论线性空间与欧式空间的对比摘要线性空间与欧式空间是《高等代数》的两部分重要内容,两者之间既有区别又有联系,简要描述他们的定义、概念、特征,并从它们的基础域、运算、基、向量的坐标、线性变换、同构几个方面进行对比讨论。
【关键词】欧式空间线性空间对比On the comparison of linear space and Euclidean spaceAbstractLinear space and Euclidean space is "Higher Algebra" is the two important parts, they are different and contact, a brief description of the definition, concept and characteristics of them, and from their basic domains, operation, matrix, vector coordinate, linear transformation of several aspects of the discussion than.【Key words】Euclidean space linear space contrast1 绪论1.1 研究目的与研究意义线性空间与欧式空间是《高等代数》中两部分重要内容,两者既有区别又有联系。
第六章 线性空间和欧式空间§1 线性空间及其同构一 线性空间的定义设V 是一个非空集合,K 是一个数域,在集合V 的元素之间定义了一种代数运算,叫做加法;这就是说,给出了一个法则,对于V 中任意两个元素α和β,在V 中都有唯一的一个元素γ与他们对应,成为α与β的和,记为βαγ+=。
在数域K 与集合V 的元素之间还定义了一种运算,叫做数量乘法,即对于数域K 中任一数k 与V 中任一元素α,在V 中都有唯一的一个元素δ与他们对应,称为k 与α的数量乘积,记为αδk =,如果加法与数量乘法满足下述规则,那么V 称为数域K 上的线性空间。
加法满足下面四条规则:1)αββα+=+;交换律2))()(γβαγβα++=++;结合律3)在V 中有一个元素0,对于V 中任一元素α都有αα=+0(具有这个性质的元素0称为V 的零元素); 存在零元4)对于V 中每一个元素α,都有V 中的元素,使得0=+βα(β称为α的负元素).存在负元数量乘法满足下面两条规则:5)αα=1; 存在1元6)αα)()(kl l k =. 数的结合律数量乘法与加法满足下面两条规则:7)αααl k l k +=+)(; 数的分配律8)βαβαk k k +=+)(. 元的分配律在以上规则中,l k ,表示数域中的任意数;γβα,,等表示集合V 中任意元素。
例1. 元素属于数域K 的n m ⨯矩阵,按矩阵的加法和矩阵的与数的数量乘法,构成数域K 上的一个线性空间,记为,()m n M K 。
例2. 全体实函数(连续实函数),按函数的加法和数与函数的数量乘法,构成一个实数域上的线性空间。
例3. n 维向量空间n K 是线性空间。
例4. 向量空间的线性映射的集合(,)m n K Hom K K 是线性空间。
二.简单性质1.零元素是唯一的。
2.负元素唯一。
3.00=α,00=k ,αα-=-)1(。
4.若0=αk ,则0=k 或者0=α。