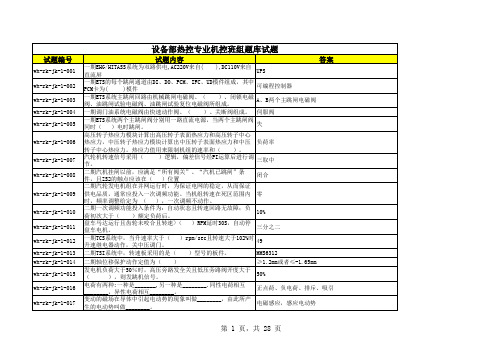
MMS6312
- 格式:doc
- 大小:12.92 MB
- 文档页数:41


中国各民用航空公司飞机机队资料(按公司分类)中国民航近期接收飞机情况:说明:本接收飞机资料的租购方式中“购买”已包含融资租赁等形式,本资料主要来源于网络及热心网友的提供,非官方数据,仅供参考,如有错误、不当或疏漏之处,请予以指正,在此表示感谢!中国民航即将接收飞机情况:2010年中国民航运营飞机退役情况:2010年1月:东星航空退租一架空客A320-200,注册号B-6337,由中国国际航空续租,注册号变更为B-66102010年2月:中国国际航空一架波音B767-300ER退出运营,注册号B-2496厦门航空退租一架波音B737-500,注册号B-2973中国东方航空一架MD90退出运营,注册号B-2257中国南方航空一架空客A300-600R退出运营,注册号B-2327中国货运航空退租一架波音MD11F,注册号B-2170;中国东方航空退租一架空客A320,注册号B-23602010年3月:厦门航空退租一架波音B737-500,注册号B-2975中国东方航空退租一架波音B737-300,注册号B-2976奥凯航空退租一架波音B737-800,注册号B-5366中国东方航空一架MD90退出运营,注册号B-2256中国国际航空一架波音B747-400M退出客运,改装为全货机,注册号B-2460;中国国际航空出售一架波音B757-200,改装为全货机,改由顺丰航空运营,注册号B-2832;上海航空A321机队由于重组及机队调整,改由中国东方航空运营,注册号B-6591、B-6592、B-6642、B-6643;2010年4月:中国国际货运航空一架波音B747-200F退出运营,改由友和道通航空运营,注册号B-2450;中国东方航空一架MD90退出运营,注册号B-2258东星航空退租一架空客A319,注册号B-6229,由成都航空续租2010年5月:中国东方航空一架MD90退出运营,注册号B-2269中国国际航空退租一架波音B737-300,注册号B-2504;中国东方航空退租一架空客A320,注册号B-2361中国东方航空一架MD90退出运营,注册号B-22682010年6月:山东航空退租一架波音B737-300,注册号B-2878;中国国际航空退租两架波音B737-300,注册号B-2600、B-2614;中国东方航空四架MD90退出运营,注册号B-2262、B-2263、B-2265、B-2270中国货运邮政航空两架波音B737-300F退出运营,改由东海航空运营,注册号B-5046、B-50472010年7月:中国国际航空出售一架波音B757-200,注册号B-2837;中国南方航空退租一架空客A320-200,注册号B-2403;2010年8月:河南航空一架ERJ190由于飞行事故报废,注册号B-3130;1.下列资料编号飞机所属公司及地点并不代表或等同于该飞机的停场过夜地点,仅表示该机在调配、财务、机务、商务执管权利由该(分)公司直接负责。
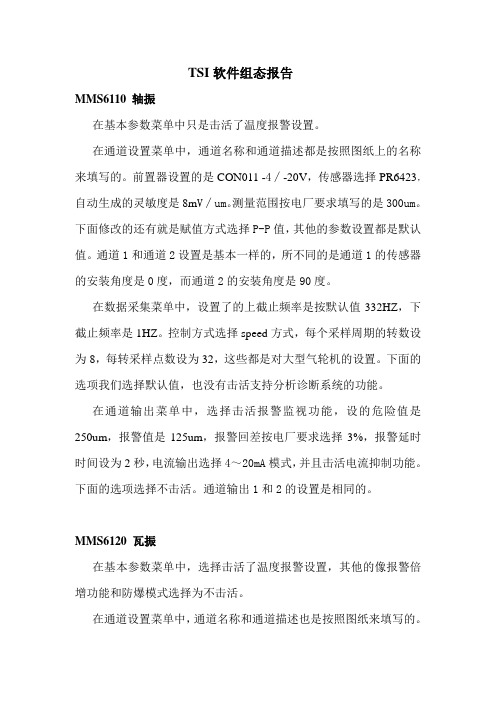
TSI软件组态报告MMS6110 轴振在基本参数菜单中只是击活了温度报警设置。
在通道设置菜单中,通道名称和通道描述都是按照图纸上的名称来填写的。
前置器设置的是CON011 -4∕-20V,传感器选择PR6423,自动生成的灵敏度是8m V∕um。
测量范围按电厂要求填写的是300um。
下面修改的还有就是赋值方式选择P-P值,其他的参数设置都是默认值。
通道1和通道2设置是基本一样的,所不同的是通道1的传感器的安装角度是0度,而通道2的安装角度是90度。
在数据采集菜单中,设置了的上截止频率是按默认值332HZ,下截止频率是1HZ。
控制方式选择speed方式,每个采样周期的转数设为8,每转采样点数设为32,这些都是对大型气轮机的设置。
下面的选项我们选择默认值,也没有击活支持分析诊断系统的功能。
在通道输出菜单中,选择击活报警监视功能,设的危险值是250um,报警值是125um,报警回差按电厂要求选择3%,报警延时时间设为2秒,电流输出选择4~20mA模式,并且击活电流抑制功能。
下面的选项选择不击活。
通道输出1和2的设置是相同的。
MMS6120 瓦振在基本参数菜单中,选择击活了温度报警设置,其他的像报警倍增功能和防爆模式选择为不击活。
在通道设置菜单中,通道名称和通道描述也是按照图纸来填写的。
传感器在通道1选择PR9268∕20,在通道2中选择PR9268∕30,安装角度分别是0度和90度。
由传感器生成的灵敏度是28.50mm∕um ∕s,内部电阻是1875.00欧姆。
电流设置选择的是off,独立提升线圈的选择会随着传感器的选择而自动输入。
通道1的测量方向选择垂直测量,通道2选择的是水平测量。
测量范围根据电厂要求设为125um。
测量值选择为P-P值,积分参考频率设为80HZ。
在数据采集菜单中,上截止频率设置为600HZ,下截止频率设为10HZ。
控制方式选择speed方式,每个采样周期的转数设为8,每转采样点数设为32,这些都是对大型气轮机的设置。
MMS6823旋转机械振动监测数据采集和通讯模件用户手册目录1系统简介与特点 (3)2结构与功能 (4)2.1模件结构 (4)2.1.1 结构简介 (4)2.1.2 硬件配置参数 (4)2.1.3 模件前面板 (4)2.1.4 模件后部 (5)2.1.5 模件底部 (5)2.2系统功能介绍 (5)2.2.1数据采集功能 (5)2.2.2数据传输功能 (6)3模件的安装与配置 (7)3.1MMS6823的安装 (7)3.1.1模件的安装 (7)3.1.2电源的连接 (8)3.1.3通讯线的连接 (8)3.1.4 MMS6823引脚的定义 (9)3.1.5鼠标/键盘/显示器的连接 (9)3.2MMS6823模件配置信息的获得 (11)3.2.1配置信息的查询 (11)3.2.2配置信息的修改 (11)3.2.3 IP地址的更改 (13)4 MMS6823 VIEW调试软件的安装与使用 (15)4.1调试软件的安装 (15)4.2调试软件的使用 (16)5 MMS6823 MODBUS通讯协议说明 (17)15.1M ODBUS通讯数据结构 (17)5.2M ODBUS通讯传送方式 (19)5.3M ODBUS通讯在MMS6823上的参数设置 (20)21系统简介与特点图-MMS6823硬件外形MMS6823特点:l8路RS 485输入l数据输出方式:- MODBUS RTU/ASCII- 以太网TCP/IPl两种总线输出方式并行,相互间不影响。
l MODBUS总线的输出方式RTU/ASCII可任选。
可传输特征值,模件实时波形数据,以及模件状态和报警状态等物理量。
l键相信号调整功能l冗余电源输入l采用标准的19”框架模件MMS6823旋转机械振动数据采集模件是德国EPRO公司生产的MMS6000汽轮发电机组振动监测保护系统的配套产品。
系统具有实时数据采集、处理、传输等功能。
它广泛适用于电力、石化、煤矿和冶金等行业的大中型旋转机械,如:汽轮发电机组、水轮机、电动机、压缩机、泵和风机等。

TSI汽轮机安全监视系统德国EPRO公司生产的MMS6000型汽轮机安全监视系统,为机组的安全、经济运行提供了可靠的保证。
TSI系统能连续地检测汽轮机的各种重要参数,对如:转速、键相、偏心、轴振、盖振、轴向位移,绝对膨胀、相对膨胀等参数进行检测帮助运行人员判明机器故障,使机组能在不正常工作引起的严重损害前遮断汽轮发电机组,保护机组安全监测汽机的系统,系统的测点具有独立的监测电路和报警设置点。
每个测量模块均有模拟量输出功能。
每个模块都可以通过RS232与电脑相连,利用MMS6100组态软件对模块所对应的模块型号,报警点等参数进行组态。
检修工艺原则1 安全措施及工作票1.1 严格执行工作票管理制度,认真办理、检查、验证工作票。
1.2 设备检修时严禁在设备上放工具、饮料等物体。
1.3 就地设备检修时防止滑倒、跌伤。
2 使用工具2.1 一块万用表、一套电工组合工具、一把尖嘴钳、组合扳手、信号发生器、摇表2.2 防静电真空吸尘器、防静电工具3 检修电子电路应遵守的原则注:当安装、调试卡件时,要使用现场防静电工具。
3.1 使用静电袋。
在把装入系统前不要把它从特殊的防静电袋中取出。
卡件取出后,袋子待以后使用。
3.2 打开前把防静电袋接地。
在打开含有半导体设备的防静电袋以前,请将其与设备外壳接触一下,或者接地。
3.3 不要触摸电路。
处理卡件时,拿卡件的两侧,不要触摸电路。
3 .4 防止半导体器件局部连接。
在使用前,一定要检查和卡件相连的所有设备是否完好接地。
3.5 测试设备接地。
3.6 使用现场抗静电吸尘设备。
3.7 使用接地手环。
连接接地环到电源引入盘上的接地插座,电源引入盘的接地插座和大地相连。
3.8 不要用铅笔或圆珠笔设置小开关,防止开关触电损坏,触电损坏可能导致不必要的电路板误动作。
各测点在汽机本体上的分部位置如下图:1、转速:机组转速传感共安装有十二只,其中键相、转速测量、机头精密瞬态转速仪各用一只,汽机超速、电超速、DEH各用三只。
TSI汽轮机安全监视系统德国EPRO公司生产的MMS600型汽轮机安全监视系统,为机组的安全、经济运行提供了可靠的保证。
TSI系统能连续地检测汽轮机的各种重要参数,对如:转速、键相、偏心、轴振、盖振、轴向位移,绝对膨胀、相对膨胀等参数进行检测帮助运行人员判明机器故障,使机组能在不正常工作引起的严重损害前遮断汽轮发电机组,保护机组安全监测汽机的系统,系统的测点具有独立的监测电路和报警设置点。
每个测量模块均有模拟量输出功能。
每个模块都可以通过RS232与电脑相连,利用MMS610组态软件对模块所对应的模块型号,报警点等参数进行组态。
检修工艺原则1 安全措施及工作票1.1 严格执行工作票管理制度,认真办理、检查、验证工作票。
1.2 设备检修时严禁在设备上放工具、饮料等物体。
1.3 就地设备检修时防止滑倒、跌伤。
2 使用工具2.1 一块万用表、一套电工组合工具、一把尖嘴钳、组合扳手、信号发生器、摇表2.2 防静电真空吸尘器、防静电工具3 检修电子电路应遵守的原则注:当安装、调试卡件时,要使用现场防静电工具。
3.1 使用静电袋。
在把装入系统前不要把它从特殊的防静电袋中取出。
卡件取出后,袋子待以后使用。
3.2 打开前把防静电袋接地。
在打开含有半导体设备的防静电袋以前,请将其与设备外壳接触一下,或者接地。
3.3 不要触摸电路。
处理卡件时,拿卡件的两侧,不要触摸电路。
3 .4 防止半导体器件局部连接。
在使用前,一定要检查和卡件相连的所有设备是否完好接地。
3.5 测试设备接地。
3.6 使用现场抗静电吸尘设备。
3.7 使用接地手环。
连接接地环到电源引入盘上的接地插座,电源引入盘的接地插座和大地相连。
3.8 不要用铅笔或圆珠笔设置小开关,防止开关触电损坏,触电损坏可能导致不必要的电路板误动作。
各测点在汽机本体上的分部位置如下图:8AS ZAfl 9A8 CA8 ►A8IH3Q13H1、 转速:机组转速传感共安装有十二只,其中键相、转速测量、机头精密瞬态转速仪各用一只,汽机超速、电超速、 DEH 各用三只。
汽轮机本体参数的监视为了监视汽轮机本体的机械设备,都要配置可靠的汽轮机监视仪表系统(Tuebine Supervisory Instrumentation)简称TSI,我单位#1、2采用上海松源系统,#3、#4采用的是成都松源系统。
汽轮机本体监视主要有以下几个方面:1、转速监视:#1#2机组:采用探头PR6423,前置器CON041。
在前箱安装三个转速探头,安装电压10v,报警值3210,跳机值3270,3取2后至ETS,在3瓦处安装一个PR9376 转速探头,安装间隙1mm,送到机头转速表#3#4机组:安装4个探头PR9376,安装间隙1mm。
其中3个测转速,一个测量零转速,通用的转速卡件MMS6312。
2、转子轴向位移的监视:#1#2机组:采用探头PR6424,前置器CON041。
在2瓦处右侧安装两个轴位移探头,安装电压10v,(-2,+2)报警值(-1.2,+0.8),跳机值(+1.2,-1.6)至ETS,#3#4机组:安装PR6424探头,前置器CON021。
在2瓦处两侧分别安装以个轴位移探头,安装电压12v,(-2,+2取反)报警值(-0.8,+0.8),跳机值(+1.0,-1.2)至ETS。
通用的线性卡件MMS6210。
3、高压缸膨胀的监护:#1#2机组:采用探头PR6426前置器CON041/916-120。
安装在前箱内安装电压12.67v,(-5.5,+6.5取反)报警值(-3,+6),跳机值(-3.2,+6.2)至ETS,#3#4机组:采用探头PR6426前置器CON021/916-160。
安装在前箱内安装电压13v,(-7,+9取反)报警值(-5,+7),跳机值(-6,+8)至ETS,通用的线性卡件MMS6210。
4、低压转子膨胀监视:#1#2 机组:采用探头PR6426,前置器CON041/916-160。
安装在3瓦处,安装电压10v(-6,+10)#3#4机组;采用探头PR6426 前置器CON021/916-160。
1目的及应用2MMS6312监视器组2.1组态软件的启动2.2参数设置2.2.1主菜单2.2.2命令“Load”,“Save”and“Exit”2.2.3“模件数据”菜单2.2.4组态数据-1菜单2.2.5组态数据-2菜单2.2.6组态数据-3菜单3功能介绍3.1信号输入和信号处理3.1.1信号输入和传感器电源3.1.2信号处理及脉冲输出3.1.3特征值的计算及输出3.2超限及功能监视3.2.1功能输出3.2.2功能状态指示3.2.3转换工作电流/静态电流模式输出1-1和输出2-13.2.4报警抑制3.2.5外部抑制/报警停止3.3状态监视3.3.1通道监视3.3.2通道正常指示出厂3.3.3通道正常输出3.3.4模板效应监视3.4模式及功能设置3.4.1鉴相模式3.4.2转速模式3.4.3冗余模式3.4.4转动方面检测3.4.5差值3.4.6双电流模式3.4.7触发电平限制值的自动使用4安装及启动4.1安装和接线4.2转速测量模式的先决条件4.3鉴相测量的先决条件4.3.1使用PR9376的鉴相测量4.3.2使用涡流测量链的监相测量4.4启动4.5传感器的调整4.6日常维护5技术数据5.1信号整形5.2通道监视5.3功能输出和报警5.4通讯接口5.5电源电压5.6环境要求5.7机械参数1目的和应用MMS6312双通道转速鉴相监测器是MMS6000机械系统的模块之一,该模板带有处理器,能使用两种转速传感器监测各种汽轮机,压缩机、风机和齿轮箱等。
除了能使用带信号转换器(PR642X和CONOXX)的涡流价传感器外,还可以使用磁阻式传感器CegxPR93761。
该监视器能在单模式下使用,也能在允余模式下使用,在允余模式下,通道1完成测量监视等功能,如果通道1故障,通道2将合完成功能,且两个通道必须用相同方式完成组态。
单一模式下,两个通道独立组态,可用来进行转速测量,触发信号监视(例如监相测量)。
MMS6312监视器的组态由上汽机或-PC机经RS232接口电缆连接到监视器的前面服接口上来完成。
组态测量结果及状态显文所需的软件,主PC与监视器间的连接电缆均是MMS6910操作组件的一部分,这套组件包括系统手册,系统手册中有有关组态,测量结果及监视器状态的测试与显文的信息。
测量范围、测量原原本本模式及测量齿轮的齿数必须在组态中确定,通过这些参数及测量的脉冲数,0~20mA或4~20mA的电流输出对应于轴的转速。
特征值的测量范围被设定在0…满量程成最小值 满量程。
模板提供自动或手动触发电平调整,手动调整在组态软件中完成,自动调整可以通过调整软件上的跳线或调整组态软件的参数来完成。
测量信号脉冲经过冲放大器送到前面板的SMB接口。
在连接条或前面板的SMB接口上能检测到经过数字代处理后通道1和通道2的测量信号脉冲。
两个隔离的集电/发射板脉冲输出(提供24V脉冲)作为监相输出,在测量轴振和盖振等情况下,选择“每转一次测量”,依靠脉冲齿轮齿数,监视器在转速一鉴相测量工况下,提供每转一个脉冲的输出。
如是采用“内齿轮截面”功能时,这种输出将可能使用,在冗余模式下,通道和2的脉冲输出是并行的。
模板前面的两个指示出厂及两个继电器输出指示通道和模板状态。
在没有错误功能被检测到的正常工况下,如果通道处在测量方式下且报警未被锁住,通道显示指示“通道正常:OK”。
如果模板检测出错误时,指示出厂将出闪烁,并且通道监视输出发生转换(常闭转为开)。
四个独立的功能输出(超限输出)提供二进制的状态信息。
在双通道模式下,输出1-1和输1-2是通道1的超限输出,而输出2-1及输出2-2是对应通道2的。
模件可以选择超限,静态或双电流输出功能。
每个二进制输出均可被设计成“差值超限”或“旋转方向检测”。
超限报警可以设定成自锁模式,报警情况消失输出也恢复后,必须通过附加外部信号或通过组态软件来进行复位。
在转速模式下,四个黄色指示灯用来指示功能输出的状态,是相应的输出功能是真实的,那么指示灯(例如超限或静止等)。
在鉴相模式,功能输出亦可作同样的组态,但四个指示灯用来指示现在的鉴相信号。
指示灯-1当鉴相脉冲输入时点亮,指示灯-2当第一个脉冲亮时,第二个熄灭。
RS485接口可以将系统连接到MMS6810网络接口上或连接到epro ADS8000数据采集分析及故障诊断系统上,当监视器通过RS232给定了总线地址时,可以通过总线进行参数设置。
模板按欧洲标准设计(100×160mm),前面板宽6TE(约30mm),通过二极管组成的两路冗余电源可提供给监视器DC24V电源。
2MMS6312监视器的组态2.1组态软件的启动组态软件存在文件<PMMS6312、EXE>,在MS-DOS下运行,MMS6000组态软件的一部分,包括MMS6910组件中,软件使用处理文件<sbat>启动,通过[C:/MMS6000/S↵]来完成,参照MMS6000系统手册第1部分。
程序进入后首先得选择监视器类型,是6310或6312,如果组态过RS485总线接口进行,那么在连接MMS6312监视器的通讯接口输入“O”即。
现在程序显示PMMS6312主菜单,并且“模佣数据”已经打开,组参数选择的为缺省值,为到模件的确切参数,到6312监视器接口连接组被建立,请参照下述部分。
σMMS6312组态已经预设了缺省参,当软件每次启动时就会显示出来,测量和状态数据可以从监视器读出,显示在组态软件的主菜单中。
时均可以F9“打印”键将组态数据打印出来。
除了在监视器显示外,任何情况下均将态存在程序中。
σ监视器的类型可以通过键F1“安装载”和键F3“模件数据”读出MMS6312的模件类型号为“6”,附类型号为“1”。
2.2参数设置2.2.1 主菜单主菜单的顶端一行指示当前已经打开的菜单名(在这个为:模件数据)和组态程序信息,底部一行为相关的功能键定义,命令装载(F1),存盘(F2),打印(F9)和退出(F10)等通过按相应的键,这些命令可被执行,按功能键F3到F8可以打开参数设定及显示,PMMS6312和向应鼠标,在菜单内不同的选项必须通过↑↓光标键来选定。
参数可以通过键盘直接参考。
当使用“存盘”命令后,所有参数即为有效。
2.2.2 命令“Load”“Save”和“Exit”命令“Load”用于从监视器中读取数据。
按下键F1,装载立即启动,正常情况不会有其它信息,如果到监视器的通讯没有正常工作(如没有连接,错误的接口或其它错误)将会有一个短的出错信息提供给你,当装载成功后;监视器的所有参数被存在计算机的主存贮器中,可以进行修正。
命令“Save”将修改后的参数传递到监视器,经过保密智询,用“S”回答后,原来的参数将会被履盖。
监视器存入新的参数后,以新参数重新开始工作。
仅当通讯未正常工作时,一个简短的错误信息将会给出。
命令“Exit”退出组态软件并返回DOS,修改后的参数不会存在计算机中,重新启动时,新的缺省参数将会被装载。
2.2.3菜单“模件数据”按下F3键,“模件数据”菜单将会被打开,当模件数据被成功装载后,他们与监视器数据⋯对应。
模件数据一除了地址以外均被到在菜单中,他们与监视器对应,在运行或组态中的问题,软件说明、软件版本、硬件出版时间、硬件造照、以及可能的系列号都会与组态软件的版本号(屏幕右上角)一起被列出,并出问题报告中。
地址号是监视器通过RS485通讯时的身份鉴别号,使用RS485按时,地址范围为1⋯⋯31,其余无效每个监视的地址独立。
2.2.4菜单组态数据-1(Cfgl)功能键F4“Cfgl”打开进入组态数据的第一个菜单,每一行包括一个可调整的参数,括号内的值为参数输入的可能范围(例上DOV⋯27、3V在顶行),冒号后面的为光标值,黑色背景的为当前所选行。
当模件数据被“Load”命令成功装载或刚通过命令“Save”传送到监视器,模件数据与监视器唯一对应。
在参数输入时,程序正进行参数是否真实的检测,超出输入极限的输入参数将被限制在相限值内。
真实值必须用十进制的小数。
对于涡流测量链(PR642X带转换器CONOXX),其输入信号是负值,如果PR9376按图5或图6接线,带正负电源,其输入信号也为负值。
由于不同的放大器和处理电路,输入放大器输出端的信号和SMB接口的信号将是反相的,如果使用正电源和正的输入信号,信号将不会倒相。
带电压定义的组态参数将用来控制连续电路,所以符号是不重要的。
所有关于放大器与触发电平的定义都与输入放大器输出端的信号相关,该信号等同于SMB接口的“传感器信号”,当使用涡流测量链时,这个信号与输入信号是反相的,请参阅脉冲图Fig.7。
通道正常上限当超过该上限值,将会给出一个通道错误信息,该值高于信号幅值,低于电源电压,当文该值被设为 27.3V时,该限制将不被监视。
标准设置:CON010…031:-26.2V;PR9376:-27.4V通道正常下限。
当低于该下限值时,将会有一个通道错误的信息,该值小于最小的信号电压,但高于0V,这样有利于检测输入端的短路现象。
如果该值设为0V,此值不被监视。
标准设置:CON010…031电压范围-4…-20V:-3.5VCON011…021,031电压范围-2…-18V:-1.5VPR9376:-0.1V上触发电平(UT1/2)当UT被选为“触发电平输出脉冲”,此值是TTL脉冲转换和键相脉冲输开始电平,它约是脉冲幅值的60…80%,参照fig.7脉冲图。
标准设置:CON010…031范围-4…-20V:-14VCON011,021,031范围-2…-18V:-12VPR9376:-19V触发电平在自动进行能找到,参见3.4.7。
下角发电平(LT1/2)当通道触发电平(LT1/2)被设定为“触发电平输出脉冲”,此值是TT2脉冲转换和键相脉冲输出开始的门槛值,它约是脉冲幅值的20…40%,具体参照fig.7脉冲图。
标准设置:CON010…031范围-4…-20V:-10VCON011,021,031范围-2…-18V:-8VPR9376:-7V该触发电平能自动运行中找到,参照3.4.7。
间隙电压限值对涡流测量键来说当信号电压低于该值时,将会产生一个警告信息。
该门槛值正比于传感器和脉冲齿轮的顶部之间的距离,该值应该是够大,以避免机械损坏。
当低于该值时,通道正常指示灯将会闪烁。
标准设置:CON010…031范围-4…-20V:-4VCON011,021,031范围-2…-18V:-2VPR9376:-0V最大转速该值现定了转速及与之对应的变量的最大值,用r/min输入。
最小转速该值定义了转速及与之相对应的变量的起始值,用r/min输入,缺省为0,输入信号的占空比。
该参数定义了脉冲负度(占零比)及循环周期50% 20% 20%触发电平的调整决定了键相脉冲的起始点,假如选上触发脉冲,别在输入信号的上升设键相开始工作。