自动控制理论讲义——教材《自动控制原理》吴麒主编
- 格式:pdf
- 大小:1.23 MB
- 文档页数:62
《自动控制原理》课程标准一、课程概述(一)课程性质地位自动控制原理是空间工程类、机械控制类、信息系统类等相关专业学历教育合训学员的大类技术基础课程。
由于自动控制原理在信息化武器装备中得到了广泛的应用,因此,将本课程设置为大类技术基础课,对培养懂技术的指挥人才有着十分重要的作用。
本课程所覆盖的知识面较宽,既有较深入的理论基础知识,也有较广泛的专业背景知识,因而,它在学员知识结构方面将起到加强理论深度和拓展知识广度的积极作用。
(二)课程基本理念为了贯彻素质教育和创新教育的思想,本课程将在注重自动控制原理的基本概念和基本分析与设计方法的基础上,适当引入自动控制发展中的、学员能够理解的新概念和新方法;贯彻理论联系实际的原则,科学取舍各种主要理论、方法的比例,正确处理好理论与案例的关系,以适应为部队培养应用复合型人才的需要;适当引入和利用Matlab工具来辅助自动控制原理中的复杂计算与作图、验证分析与设计的结果;本课程应该既使学员掌握必要的基础理论知识,并了解它们对实际问题的指导作用,又要促进学员养成积极思考、长于分析、善于推导的能力和习惯。
(三)课程设计思路本课程主要介绍自动控制原理的基本概念和基本的分析与设计方法。
课程采用“一纵三横”的设计思路,具体来说,“一纵”就是在课程讲授中要求贯彻自动控制系统的建模、分析及设计方法这条主线;“三横”就是在方法讲授中要求强调自动控制系统的稳定性、快速性和准确性,稳准快三个字是分析的核心,也是设计的归宿。
在课程讲授中,贯彻少而精的原则,即对重点、难点讲深讲透;注意理论联系专业实际,例子贴近生活,注重揭示抽象概念的物理意义;注意传统教法与现代教法的有机结合,充分运用各种教学手段,特别注重发挥课程教学网站的作用。
在课程学习中,注重阅读教材、完成作业、课程实验及讨论问题等四个环节,深刻理解课程内容中的重点和难点,重点掌握自动控制原理的基本概念和基本分析与设计方法。
二、课程目标(一)知识与技能通过本课程的学习,使学员掌握自动控制原理的基本概念和基本的分析与设计方法,重点培养学生利用自动控制的基本理论分析与解决工程实际问题的思维方式和初步能力,并为学习后续相关专业课程,以及进一步学习和应用自动控制方面的新知识、新技术打下必要基础。
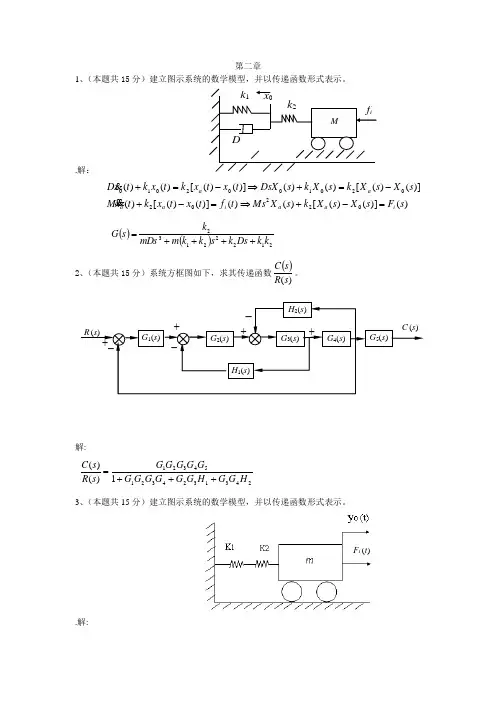
第二章1、(本题共15分)建立图示系统的数学模型,并以传递函数形式表示。
.解:)()]()([)()()]()([)()]()([)()()]()([)()(022020*********s F s X s X k s X Ms t f t x t x k t xM s X s X k s X k s DsX t x t x k t x k t xD i a a i a a a a =-+⇒=-+-=+⇒-=+()()21222132k k Ds k s k k m mDs k s G ++++=2、(本题共15分)系统方框图如下,求其传递函数())(s R s C 。
解:2431324321543211)()(H G G H G G G G G G G G G G G s R s C +++= 3、(本题共15分)建立图示系统的数学模型,并以传递函数形式表示。
.解:F i (t )2121)()()(k k k k k t F t y k t y m i +⋅='='+()2122121)()()(k k ms k k k k s F s Y s G i ⋅+++==4. (本题20分) .建立图示系统的数学模型,并以传递函数形式表示。
解:)()()()()()()()(021202100s F s Y k k Ds ms t F t y k k t y D t ym i i =+++=+++2121)(k k Ds ms s G +++=5. (本题20分)解:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=+=⎰⎰dt t i C R t i t u t i t i t i R t i dt t i C R t i t u t u i )(1)()()()()()()(1)()()(220211121110 ⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=+=)(1)()()()()()()(1)()()(220211121110s I s C R s I s U s I s I s I R s I s I sC R s I s U s U i ()()11)(11222122121221122121+++++++=s C R C R C R s C C R R s C R C R s C C R R s G y 0(t )6、(本题共20分)带有保护套管的热电偶的传热过程可用如下的方程组来描述,12222q q dt dT C m -= 1111q dt dTC m = 222R T T q -= 1121R T T q -=选定T 作为输入1T ,作为输出,完成以下要求。
北京理工大学自动控制原理内部讲义第一讲专业信息介绍首先欢迎大家来听我讲课,既然大家选择报考北京理工大学,相信大家对学校的自动化这个专业在全国的一个整体的位置肯定有个大致的了解!我个人认为还是相当不错的!那我们学校招收这个专业的学院很多,主要以原信息科学技术学院和原宇航科学技术学院为主,当然也包括其他几个学院,下面就是08年招生的一个表。
招生学院招生人数(单位:个)信息科学技术学院(1院)133宇航科学技术学院(2院)34化工与环境学院(5院)13管理与经济学院(8院) 1计算机学院(12院) 22009年由于学校进行了学院调整,原信息学院调整为自动化学院,信息与电子学院以及光电学院,宇航科学技术学院调整为宇航学院与机电学院等,专业调整较大,人数不便统计,在此不一一列举。
总体而言,招生人数很多,但同时报考人数也多,历年来比例均维持在1:3到1:4之间,竞争非常激烈。
整个控制科学与工程这个一级学科下面分了6个方向,分别是控制理论与控制工程、导航制导与控制、模式识别与智能系统、检测技术与自动化装置、系统工程、运动驱动与控制。
由于各个方向以后的发展不同招生的人数不同,所以报考的人数也不同。
这就导致了复试分数线也不同,所以选好相对应的方向直接影响你是否会被录取。
下面以就自动化学院,宇航学院以及机电学院为例介绍关于此方面的信息。
控制理论与控制工程(简称双控)是国家重点学科,所以报考人非常多,其中最出名的导师就是伍清河教授,控制理论与控制工程比较偏向于理论研究,有这方面爱好的同学可以报考。
就业方面导航、制导与控制方向是国防重点学科,长期有国家大型项目,所以发展的非常好,其中最富盛名的导师有付梦印教授;模式识别与智能系统这个比较偏向电子,这个方向的导师有任雪梅等教授,检测技术与自动化装置方向的导师主要有陈祥光,彭光正等教授。
系统工程方向也是比较偏向理论的方向,与控制理论与控制工程相比报考的人数会少些,当然钟秋海教授就是这个方面比较权威的专家。
自动控制原理下吴麒自动控制原理是指通过某种设备或系统来实现对某种目标进行自动调节和控制的原理。
这个原理广泛应用于各个领域,例如工业控制、交通控制、机器人控制等等。
在自动控制原理中,吴麒是一个非常重要的人物,他对于自动控制原理的发展和应用做出了重要的贡献。
吴麒是中国工程院院士,也是自动化学科的开创者之一。
他一生致力于自动控制理论研究与应用,对于我国自动控制事业的发展做出了巨大的贡献。
吴麒的研究领域主要包括控制理论、系统工程与自动化、工业过程控制与优化等方面。
他在自动控制领域的研究和应用中,提出了许多重要的理论与方法,对于改进控制系统的稳定性、精度和鲁棒性起到了重要推动作用。
他的科研成果不仅在理论研究方面卓有成就,还在实际工程应用中取得了很大的成功。
在自动控制原理方面,吴麒的研究主要集中在控制系统的建模与设计、控制系统的分析与优化、控制系统的鲁棒性等方面。
他通过对控制系统中各个组成部分以及它们之间的相互关系进行深入研究,提出了一系列重要的理论和方法。
其中比较有影响力的有:鸢尾模型理论、滑模控制理论、鲁棒控制理论等等。
鸢尾模型理论是吴麒提出的一种用于描述控制系统的数学模型的方法。
这种方法将控制过程看作是一个多变量系统,在控制系统中使用鸢尾模型可以较好地描述系统的动态特性和稳定性。
通过对系统模型的建立和分析,可以对系统的性能进行评估和优化。
另外,滑模控制理论也是吴麒的一个重要研究方向。
滑模控制是一种通过引入滑模面来实现对系统状态的快速调节和控制的方法。
吴麒在滑模控制理论中提出了一种新的滑模控制器设计方法,能够解决传统的滑模控制器在实际应用中容易产生“抖振现象”和“超调现象”的问题。
这种方法大大提高了滑模控制系统的精度和稳定性,使其在实际工程应用中更加可靠和有效。
此外,鲁棒控制理论也是吴麒在自动控制原理中的重要研究方向之一。
鲁棒控制是一种能够对系统的参数变化和外界扰动具有一定鲁棒性的控制方法。
吴麒在鲁棒控制理论中提出了一种鲁棒性分析和设计方法,能够使控制系统对参数变化和扰动具有较好的抑制能力,提高控制系统的稳定性和鲁棒性。

自动控制原理(吴麒)自动化学科有着光荣的历史和重要的地位,20世纪50年代我国政府就十分重视自动化学科的发展和自动化专业人才的培养。
五十多年来,自动化科学技术在众多领域发挥了重大作用,如航空、航天等,“两弹一星”的伟大工程就包含了许多自动化科学技术的成果。
自动化科学技术也改变了我国工业整体的面貌,不论是石油化工、电力、钢铁,还是轻工、建材、医药等领域都要用到自动化手段,在国防工业中自动化的作用更是巨大的。
现在,世界上有很多非常活跃的领域都离不开自动化技术,比如机器人、月球车等。
另外,自动化学科对一些交叉学科的发展同样起到了积极的促进作用,例如网络控制、量子控制、流媒体控制、生物信息学、系统生物学等学科就是在系统论、控制论、信息论的影响下得到不断的发展。
在整个世界已经进入信息时代的背景下,中国要完成工业化的任务还很重,或者说我们正处在后工业化的阶段。
因此,国家提出走新型工业化的道路和“信息化带动工业化,工业化促进信息化”的科学发展观,这对自动化科学技术的发展是一个前所未有的战略机遇。
机遇难得,人才更难得。
要发展自动化学科,人才是基础、是关键。
高等学校是人才培养的基地,或者说人才培养是高等学校的根本。
作为高等学校的领导和教师始终要把人才培养放在第一位,具体对自动化系或自动化学院的领导和教师来说,要时刻想着为国家关键行业和战线培养和输送优秀的自动化技术人才。
影响人才培养的因素很多,涉及教学改革的方方面面,包括如何拓宽专业口径、优化教学计划、增强教学柔性、强化通识教育、提高知识起点、降低专业重心、加强基础知识、强调专业实践等,其中构建融会贯通、紧密配合、有机联系的课程体系,编写有利于促进学生个性发展、培养学生创新能力的教材尤为重要。
清华大学吴澄院士领导的《全国高等学校自动化专业系列教材》编审委员会,根据自动化学科对自动化技术人才素质与能力的需求,充分吸取国外自动化教材的优势与特点,在全国范围内,以招标方式,组织编写了这套自动化专业系列教材,这对推动高等学校自动化专业发展与人才培养具有重要的意义。
![北理 自动控制理论讲义——教材《自动控制原理》吴麒主编[1]概要](https://uimg.taocdn.com/b3b0773ffc4ffe473368abf9.webp)
自动控制理论一.介绍课程基本情况学时64 还要适当减少教材:《自动控制原理》上下册吴麒主编参考书: 现代控制工程绪方胜彦自动控制理论基础戴忠达自动控制原理国防工业出版社李友善Matlab讲义及有关该软件的工具书实验:模拟实验(控制理论实验室)Matlab(自己做)实验后一周交报告作业:每章交一次教员:辅导:期中考试待定,17—18周期末考试(笔试)二.本课程的重要性及学习方法1.信息学院的五大平台课之一,自动化专业的必修课,控制论基础2.课程改革情况3.学习方法应用数学工具分析解决工程问题思维方法抽象综合4.学术活动IFAC—中国自动化学会—专业委员会IFAC’99 北京CDC, ACC, ECC, CCC三.介绍我国的自动化学科发展的历史.现状及发展前景1949. 上海交大张钟俊伺服系统1950. 清华大学钟士模自动调节原理1970末清华及全国一些重点大学现代控制理论及最优控制80年代最优自适应辨识随机大系统鲁棒90年代模糊智能CIMS 信息技术,网络要求:基础交叉独立学习接受新东西的能力科技活动第一章:绪论一.反馈控制原理1.负反馈概念典型系统框图2.闭环系统主要问题 1.稳定2.性能3.开环控制二.控制系统的基本组成三.控制系统的分类1.从系统实现目标上分伺服系统,恒值系统2.从输入输出变量的个数分SISO,MISO3.从信号性质连续,离散,混合4.数学描述线性,非线性5.从控制方式上分1.按偏差控制2.复合控制3.先进的控制策略四.控制系统的基本要求1.稳定2.静态指标3.动态指标品质、性能第二章:控制系统的数学模型§1. 控制系统的微分方程描述1)R —L —C 电路根据电路基本原理有:⎪⎩⎪⎨⎧==++dt du c i u u L R c r c dtdiir c c c u u dt duRc dtu d Lc =++⇒222)质量-弹簧-阻尼系统由牛顿定律: ∑=ma F22dtyd m dt dy f ky F =--F ky dt dyf dty d m =++⇒223) 电动机:电路方程: a a aa a r i R dtdi L E u +=- (1) 动力学方程: dtd JM M c Ω=- (2) ⎩⎨⎧=Ω=(4) (3)a d d a i k M k E(4)→(2) 得:(5) dcd a k M dt d k J i +Ω= (3)(5)→(1)得:)(22c d ac a a rd d a d a M k R dt dM R L u k dt d k J R dt d k J L --=Ω+Ω+Ω 整理并定义两个时间常数m daT k JR =2 机电时间常数a aaT R L = 电磁时间常数 ∴ 电机方程(........)122-=Ω+Ω+Ωr d m m a u k dt d T dtd T T如果忽略阻力矩 即0=c M ,方程右边只有电枢回路的控制量r u ,则电机方程是一典型二阶方程如果忽略a T (0=a T )电机方程就是一阶的r dmu k dt d T 1=Ω+Ω1.随动系统的例子:(图见教科书《自动控制原理》上册P20图2.11)126101112φ1)电位器组. )(ϕψ-=p p k u 2)放大器-发电机励磁p faf f fp a f ff f u R k I dtdI T u k dtdI L I R =+⇒=+ 3)发电机-电动机组f g f I k E =f d m m a E k dt d T dtd T T 122=Ω+Ω+Ω4)传动机构ϕ→Ω Ω=t k dtd ϕ整理得:ψϕϕϕϕϕ=++++++dtd k dt d k T T dt d k T T dt d k T T T m f a f m a f 1)(223344df eg a p k R k k k k k =开环比例系数解释k 的物理意义 解释ϕ跟踪ψ无差§2. 传递函数Laplace 变换L[f(t)]—F(s) 从时域→复域定义:⎰∞==0)()(dt e t f s F st举例:)(1)(t t f = se s dt e s F stst 101)(0=∞-===∞-⎰ 常见函数的Laplace 变换:s t 1)(1→21st →αα+→-s e t 122s i n ααα+→s t 22c o s αα+→s st用Laplace 变换解微分方程⎪⎩⎪⎨⎧===+0y(0}1r r y dtdy T 方程两边进行Laplace 变换(零初始条件))()()(s r s y s y Ts ---=+ Ts ss Ts Ts s r s y 1111.111)()(+-=+=+=--反变换 Tt et t y --=)(1)(当)()(t t r δ= Ts TTs s y 11111)(+=+=-反变换 T te Tt y -=1)(Ty o y 1)0(,0)(==+-,初值跳变问题! Laplace 变换的初值定理 )(lim )0(s x s x s -∞→+=终值定理:)(lim )(0s x s x s -→=∞定义传递函数)()(/)(s G s r s y =--零初始条件下传递函数变换输入的变换输出的=LaplaceLaplace把上面的随动系统用传递函数表示,并化成框图)0()0()(][('222y sy s y s dty d L --=-,什么是零初始条件? 如何从该框图求得ϕ与ψ之间的关系?传递函数从微分方程↔§3. 框图及其变换一. 框图的几种连接方式串联 传递函数相乘)()()()(21s G s G s u s y =--并联 传递函数相加)()()()(21s G s G s u s y +=--反馈G(s):前馈通道的传递函数H(s):反馈通道的传递函数G(s)H(s):开环传递函数)()(1)()()()(s H s G s G s u s y yG yH u +==--- 同理可得正反馈下:)()(1)()()(s H s G s G s u s y -=--前面随动系统的例子自己推导出 之间的关系与ψϕ(1)传递函数(2)微分方程二.框图变换 1)交叉反馈此例说明交叉点左右移动对传递函数的影响,跨越点,求和点要注意 2)有扰动输入的情况a)求)()(s r s y --(f=0)b)求)()(s f s y --(r=0)c)为使y 不受扰动f 的影响应如何选4G ?a) 21211)()(G G G G s r s y +=--b)2121431)()()(G G G G G G s f s y +-=--当0)()(=--s f s y 即134G G G =,y 不受f 影响3)顺馈的例子:变换框图:433143321111)()()(G G G G G G G G G s r s y ++++=-也可把它看成是双输入系统+补充题:§4. 信号流图● 节点表示变量(框图表示) (信号流图表示)● 两节点之间的传递函数叫传输(增益),用直线加箭头表示● 支路:两节点之间的定向线段 ● 回路:闭合的通路● 不接触回路:没有公共节点的回路前面补充题1用信号流图表示如下:计算信号流图中的两节点之间的传递函数用梅逊公式∑∆∆=ii i s s Q s H )()(1)()(s Q i 第i 条前向通路传递函数的乘积∆ 流图的特征式= 1 - 所有回路传递函数乘积之和+每两个互不接触回路传递函数乘积之和-每三个….=1-∑∑∑-+bccbaaLL L ..........条前向通路接触的回路中处除去与第从余子式i ,∆∆i 此例,有前向通路三条 543211G G G G G Q = 65412G G G G Q =7213G G G Q =回路四个254632722141 H G G G L H G G L H G L -=-=-= 254324H G G G G L -=互不接触回路 21,L L 互不接触214321)(1L L L L L L ++++-=∆ 11=∆12=∆131L -=∆)(1332211∆+∆+∆∆=Q Q Q r c2.顺馈的例子前向通路 311G G Q = 回路:431G G L -= 无不接触回路 322G G Q = 312G G L -=)(121L L +-=∆ 1,121=∆=∆ )(12211∆+∆∆=∴Q Q r y补充题2.前向通路:6543211G G G G G G Q =回路: 2321H G G L -, 1212H G G L =, 453H G L -=3654H G G L =,43215G G G G L -=,56543216H G G G G G G L -=不接触回路:L 1L 3, L 1L 4, L 2L 3, L 2L 4, L 5L 3, L 5L 411=∆+++-=∆).....(161L L ()(453542324131L L L L L L L L L L L L +++++111∆∆=Q r c 作业:2.1 a. b. c. 2.5a(提示:用复数阻抗法) 2.50 2.51 补充二题.两种方法解:框图变换法和信号流图法§5.控制系统的基本单元1) 比例:k s G =)(2) 惰性(惯性):11)(+=Ts s G ,T .时间常数 阶跃响应特征 3) 二阶振荡环节121)(22++=Ts s T s G ζ T 时间常数,ζ阻尼系数特征方程的根 =2.1s 2222442TT T -±-ζζTT12-±-=ζζ10<<ζ,一对共轭复根(实部为负) 其响应表现为 衰减振荡0=ζ ,一对共轭虚根 等幅振荡 1=ζ , 两个相等负实根 单调衰减 1>ζ ,两个不相等的负实根,可分解为两个惰性单元 单调衰减说明:系统动态响应的性质取决于其特征根的性质4) 积分ss G 1)(=5)延迟环节 s e s G τ-=)(6)微分环节 以上三个环节2).3).4).的倒数分别称为一阶微分,二阶微分,纯微分这些环节不能单独存在,只能与其它环节配合使用§6.线性化问题以放大器为例:在一定范围内输出与输入是线性关系y=kx ,但是当放大器饱和时,y 与x 就不是线性关系了。