圆片检测课KLA AIT步骤
- 格式:doc
- 大小:30.00 KB
- 文档页数:2
12. KLA自动外观检查谭莉、田广彦、黄翔、沈洵自动外观检查是通过光学CCD Camera,对相邻象素之间感度的比较来判断缺陷的有无,从而将缺陷的个数、位置检测出来,并对缺陷进行分类和确认。
自动外观检查设备主要由两个部分组成:①自动外观检查装置②外观检查Review装置(外观检查的辅助设备)。
以下对两个装置分别加以说明(KLA为厂商名)。
一、自动外观检查装置1、目的判断缺陷的有无,检出缺陷的个数和缺陷在基板上的位置。
2、适用工程⑴产品检查①G检主要用于SFT型。
对G层光刻胶剥离后的G-Short、G-Open进行全检,对发生G-COM 短路的基板进行抽检。
②最终检查(全检)阵列基板全部完成后的全数检查,对SFT和TN都适用。
阵列基板以点缺陷发生的概率较高。
⑵工艺检查①CVD成膜后的检查(抽检)可用来确认CVD装置的发尘状况。
②Inline PR后的检查(抽检)防止Inline PR装置突发性的异常,及时对设备进行维护。
③共通缺陷检查(抽检)防止曝光时由于Mask上的异物,而引起在基板的同一处产生同一缺陷。
④刻蚀异常和剥离残余的检查量产时,先进行Array Test,当异常原因无法检测出来时,再利用KLA自动外观检查装置对每一道工序进行检查;而条件设定初期,对每一次刻蚀和剥离后都要进行KLA检查。
另外,需注意的是:如已知一个Lot中的所有基板都存在缺陷,只进行抽检;若只有一两片基板有误,则要进行全检。
因此可由不良发生率和经验来决定是抽检还是全检。
3、原理⑴装置构成自动外观检查装置主要由光学系统、XY 基台、用户界面、计算机以及基板搬送系统构成。
光学系统由反射镜、透射镜、自动对焦系统、CCD Camera 、图像传感器等组成,结构简图如图12.1,其中透射镜有8倍和4倍之分,且可自由更换。
⑵检出原理通过在图形之间来回往复扫描,对相邻像素进行比较而将缺陷检出。
如图12.2所示,①A 和B 比较→A ≠B ,②B 和C 比较→B ≠C ,③B 有缺陷。
圆二色谱仪使用手册实验前请先阅读第一部分注意事项2011年4月6日整编河北大学理化中心目录一、注意事项二、光源的选择三、MOS 450波长的校正四、电压的调节五、MOS-450 圆二色光谱扫描操作规程六、MOS 450-SFM 300动力学操作方法一、注意事项1、滴定及变温实验时,需要磁子搅拌。
实验结束时首先拔掉搅拌电源。
在样品池内无磁子的情况下搅拌器空转会烧毁控温元件。
2、光源(也就是氙灯或汞氙灯)不可频繁开关。
举例而言,如果马上不用仪器,但半个小时后需要使用仪器,就不要为了节约光源寿命而将光源关闭。
短时间内频繁开关光源反而会缩短光源寿命。
3、光电倍增管移动时(比如从圆二色模式换为荧光模式),注意用软件将Hv(高压)关闭。
4、扫描速度在0.5-5s/nm。
使用手册上写的扫描速度有误,特别注意不要低于0.5秒/nm,过快的扫描速度易造成calibration移位。
5、如需用到emission单色器,就是那个需要用光纤连接的单色器,扫描速度要大于1s/nm,连0.5s/nm都不能用。
6、PMT的HV不要超过1000V.7、使用控温附件进行变温实验时,一定要将地上的那个水浴恒温槽打开,水槽温度设为20度以下即可。
8、TCU上设置为remote; Power supply设置为ARC.9、仪器运行过程中,更换样品时,shutter最好关闭。
二、光源的选择1、电源:图1中的Lamp power supply处有Xe(红色)、Xe(Hg)(红色)、零线(黑色)三个插孔。
零线插头为黑色,直接插到黑色的零线插孔中。
火线插头为红色,在做圆二色、紫外、荧光的光谱扫描时插在Xe(红色)插孔中,在做快速动力学测量的时候插在Xe(Hg)插孔中。
2、光源选择:图2中的Vertical setting部位下方的底座上有Xe、Xe(Hg)两个标示前后排列。
手动松开中间的大圆头Screws(图2中),可以拉出或推进Vertical setting。
kla的晶圆缺陷检测原理KLA的晶圆缺陷检测原理晶圆缺陷检测是半导体制造过程中非常重要的一步,旨在确保生产的芯片质量符合要求。
KLA(KLA-Tencor)是一家专注于半导体制造过程控制和检测的公司,其晶圆缺陷检测技术在行业中享有很高的声誉。
本文将介绍KLA的晶圆缺陷检测原理。
KLA的晶圆缺陷检测原理主要基于光学显微镜技术。
该技术通过显微镜对晶圆进行扫描,并使用高分辨率的图像传感器捕捉图像。
在图像处理过程中,KLA会利用先进的算法和模式识别技术来检测并分析晶圆上的缺陷。
KLA的晶圆缺陷检测系统会对晶圆进行预处理,包括去除背景噪声、调整图像对比度等。
然后,系统会将晶圆分成多个区域,并对每个区域进行扫描。
在扫描过程中,系统会采集大量的图像数据。
接下来,KLA的算法会对图像数据进行分析,并寻找可能的缺陷。
算法会通过比较不同区域的图像特征、纹理和颜色等信息来判断是否存在缺陷。
对于已知类型的缺陷,算法可以根据之前的经验进行准确的识别。
对于未知类型的缺陷,算法会将其视为异常,并生成报警。
在识别缺陷后,KLA的系统会将其定位并分类。
定位是指确定缺陷在晶圆上的位置,而分类是指将缺陷归类为不同的类型,如污染、划痕等。
KLA的系统会根据缺陷的位置和类型,生成详细的报告,以供工程师进行进一步分析和决策。
KLA的晶圆缺陷检测原理的关键在于图像处理和算法。
图像处理技术可以提高图像的质量和清晰度,从而更准确地检测缺陷。
而算法的设计和优化则直接影响检测的准确性和效率。
KLA不断改进和优化其算法,以应对不同类型的缺陷和不同制程要求。
KLA的晶圆缺陷检测原理还包括一些辅助技术。
例如,KLA可以通过多角度照明和反射技术来提高缺陷的检测率。
总结起来,KLA的晶圆缺陷检测原理基于光学显微镜技术,通过图像处理和算法分析晶圆上的缺陷。
该原理在半导体制造过程中起着关键作用,可以提高生产效率和芯片质量。
KLA不断创新和改进其技术,以应对日益复杂的半导体制程要求。
![[PPT]-圆二色谱CircularDichroism(CD)](https://uimg.taocdn.com/561ccaee0d22590102020740be1e650e52eacf1b.webp)
![[指南]圆片检测课klaait步调](https://uimg.taocdn.com/bf76c1de9fc3d5bbfd0a79563c1ec5da50e2d6da.webp)
KLA2135的标准操作规程:1、确认来片的流程单,GUI系统与片盒、圆片、圆片数量是否相符。
2、将需测量的圆片放入标准圆片架(黑色)中,进行理片,找出需检测圆片的Slot位置。
3、确认设备状态是否正常,打开防尘罩门。
4、将测量圆片及片架轻放入片架台,确认片架放在片架台的合适位置。
5、按load键,关闭防尘罩门,片架进入取片位置,机械臂自动扫描。
6、在菜单Main中用鼠标选Run。
7、在Run的菜单下选中Directory。
8、在Name>下输入所需测量的产品名*按Enter,根据层次用鼠标左键选择正确的菜单。
9、在Run的菜单下选中Name Lot,输入批号,按Enter。
10、在Run的菜单下选中Lot Plan,点Edit Plan,鼠标双击左键选择需要测量的圆片位置号,单击右键返回上级菜单。
11、将Run的菜单下Auto Transfer选中On。
12、在Run的菜单下选中Wafer ID,点Edit ID输入相应的片号,单击右键返回。
13、点Run,开始自动检测。
14、检测结束后记录在Lot Summary窗口中读取并将缺陷数目及缺陷密度的数据记录在流程单及GUI中。
15、按Unload键将片架退出,根据GUI系统判断数据是否超范围,如无将圆片送出,如有通知工艺处理,处理结束后将圆片送出。
KLA2135手动对位步骤1、在Run的菜单下选中Directory,在Name>下输入所需测量的菜单。
2、输入需测量的批号,选择需测量的Slot位,输入片号。
3、在Run的菜单下点Mor e→Manual Load→Load Wafer,选择你需要测量的Slot。
4、点Manual Align后跳出蓝色对话框点GO。
5、在低倍下粗对位,将十字导航键移至对位图形旁,点左键,设备自动跳至第二个对位点,重复粗对位步骤。
6、在高倍下精对位,将十字对位键移至对位图形旁,点左键,设备自动跳至第二个对位点,重复精对位步骤。
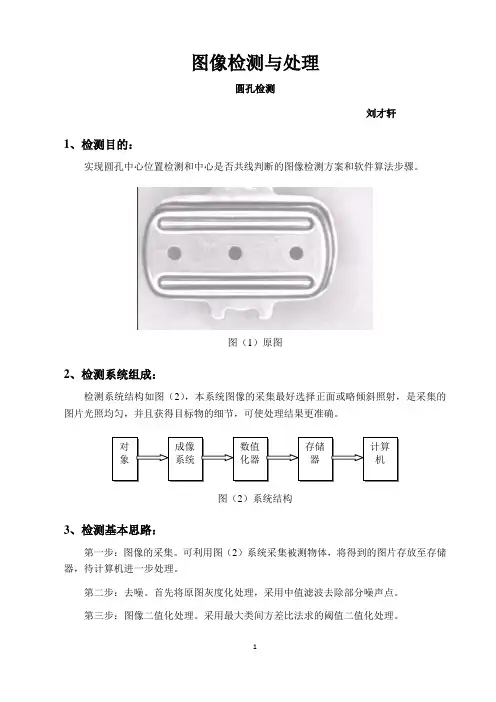
图像检测与处理圆孔检测刘才轩1、检测目的:实现圆孔中心位置检测和中心是否共线判断的图像检测方案和软件算法步骤。
图(1)原图2、检测系统组成:检测系统结构如图(2),本系统图像的采集最好选择正面或略倾斜照射,是采集的图片光照均匀,并且获得目标物的细节,可使处理结果更准确。
图(2)系统结构3、检测基本思路:第一步:图像的采集。
可利用图(2)系统采集被测物体,将得到的图片存放至存储器,待计算机进一步处理。
第二步:去噪。
首先将原图灰度化处理,采用中值滤波去除部分噪声点。
第三步:图像二值化处理。
采用最大类间方差比法求的阈值二值化处理。
第四步:贴标签。
二值化后的图像中除目标三个圆孔外,还包括许多别的信息,通过贴标签,将不同的连通区域进行不同的编号,为提取圆孔做准备。
第五步:识别圆孔。
首先计算贴标签后的图像不同连通区域的面积,提取各同连通区域的边界,计算各连通区域的周长,然后计算各连通区域的圆形度,通过圆形度识别三个圆孔。
第六步:中心检测。
首先分别求三个圆孔的质心坐标,然后判断三点是否共线。
4、软件实现与算法描述:4.1 噪声抑制噪声抑制可以直接处理,也可以在变幻域处理,主要处理方式为均值滤波、中值滤波和在变换域中滤波。
噪声主要可以分为椒盐噪声和高斯噪声,其中均值滤波对高斯噪声的抑制有较好的效果,而中值滤波则对椒盐噪声有较好抑制。
另外,还有边界保持平滑滤波,K 近邻(KNN)平滑滤波、KNN 中值滤波等。
中值滤波思想:本软件是选择了3*3的模板,首先读取除图片边界点的各各像素的灰度值,将其灰度化,其中灰度化公式采用:()/3f R G B =++然后排序,取灰度大小为这9点中间的灰度值代替目标像素灰度值,从而完成滤波;中值滤波算法中排序相对比较繁琐,计算时间现对较长。
程序运行结果如图(3),图(3)是连续两次中值滤波的效果。
4.2图像二值化处理二值化处理的关键是阈值的确定,一般采用基于图像灰度分布的阈值方法,如峰谷方法、p-参数法、均匀性度量法、最大类间、类内方差比法、聚类方法、局部阈值方法、均值迭代法等。
AOI程序注册与调试技巧快捷键 Ctrl+D 临时检测Ctrl+S 保存数据Alt+R 合并注册Alt+U 单元注册Alt+S 复位F2 优化测试路径(一)做程序的步骤:(大概步骤是先注册,然后调试学习)1.做缩略图,定Mark2.注册元件(参照下面)3.所有元件注册完之后,刷新路径,保存,复位一次4.在模式下改为:全部自动定位然后测试一次 (如果是块拼版,将一小块注册好的框复制到其他小块上后,需要刷新路径,保存,复位,定位检测)5.定位完后,刷新路径,复位一次将模式改为:不自动定位6.保存,等待调试学习(二)软件注册方法有六种:1.权值图象:用于丝印字符,较小的本体(0402以下元件),无法用“颜色提取”注册的引脚焊盘,IC焊脚2.IC短路:用于注册IC的一排焊脚3.相似性:用于较大本体(0603以上阻容件)4.颜色提取:用于电容电阻锡膏足的引脚5.通路检测:用于检测IC短路与密集元件区多件\连焊等6.OCR/OCV:用于检测国际通用标准字符丝印* 0402以上电容电阻本体用相似性,引角采用权值或颜色提取(亮度的上限值调小至200左右,饱和度下限值调到30-40之间)* 电阻丝印部分用权值,去掉红色,调以下亮度和对比度,使得丝印较清晰。
*所有的丝印(电阻,三极管,IC)都是去掉红色,调节亮度和对比度。
* 0402和0402以下的电容电阻本体用权值注册。
* 二极管级性点用权值。
(三)调试学习:1.将模式改为--全部学习,点击测试,判断合格,不合格2.学完一块板后,会有一些NG报出,对NG做相应的修改,修改后刷新路径,复位,然后在这块板上再学习数次。
换板重复以上动作,直到NG较少,程序稳定,便可以测试了(四)如何修改:1.NG中出现多个相同的误报点,只需修改一个就OK,其他的不用管2.框偏的就调正,回到当前镜头先整体给元件定位,然后挪动偏框(调正后还偏的就修改偏移量--改小)如果还是偏,重新做一个标准。
对数字图像快速有效的圆检测方法摘要:本文提出了两种新的和有效的源于灰度图像的圆检测方法。
作为一种工具,我们已经使用了在一个方案中的蚁群算法。
在其它计划中,我们使用蚁群再生和重组系统(ARRS),自主研发的一种全新的方法。
在这里提出的方案,有三个常见的步骤。
首先,MATLAB边缘检测算子将灰度图像转换成一个二进制的1;然后我们应用此二进制图像检测闭合回路;最后,这些闭合回路用来测试圆。
方案的主要特点之一是,他们可以检测相交和不想交的圆圈组成的不同形状的图像。
第一个方案是传统的蚁群算法修改之后的应用程序,在计算结果方面有很准确的结果。
因此,我们构建一个新的蚁群系统(ARRS),可以在令人难以置信的时间和内存效率检测出圆,使其适用于实时应用。
关键词:循环检测,圆检测,蚂蚁系统算法,蚁群再生和重组系统。
1.引言从拍摄的图像的检测规则几何形状的各种方法已经被研究。
其中Hough变换(HT)是最流行的一种,已被用于提取分析功能,如直线,圆,椭圆,因为它抗噪声好。
这种技术的一个严重的缺点是它巨大的时间和空间复杂度,时间复杂度与用于表征该形状的参数的数目呈指数增长。
本文中,我们提出了全新的方案来有效地进行圆检测,从现实生活中的图像,同时使用蚁群算法和蚂蚁再生和重组系统(ARRS),这是一种全新的算法。
据我们所知,我们无法从有效的灰度图像准确、快速地提取有关相交或者是非相交的圆的任何工作,这一点是我们论文所主要研究的。
本文已被细分为8个部分。
第二节将介绍我们的第一个基于蚁群算法的圆检测方案,我们将其叫做方案I。
在第三节,我们介绍了我们的方案II蚂蚁再生和重组系统。
在第四节提出了一种基于探索方案II图形基础上改进的闭环检测方法。
第五节中提供了基本算法,用于从闭环中检测圆。
第六节为方案I和方案II提供了仿真结果,文章最后的结论和今后的工作范围在第七部分。
由于空间的稀缺性,我们无法提供预览的蚁群算法。
详细讨论这算法可在[3],[4]。
OPT小讲堂∣SciSmart图像检测之轮廓提取和轮廓操作在第十一课中我们讲了图像检测中的划痕检测,今天讲一讲其中的轮廓提取和轮廓操作工具。
什么是轮廓提取?图像中灰度值变化比较剧烈的,且具有连续性等特性的地方定义为轮廓,轮廓提取功能就是获取图片中的轮廓。
轮廓提取的基本思想是利用边缘增强算子,突出图像中的局部边缘,然后定义像素的“边缘强度”,通过设置阈值的方法提取边缘点集。
因此,轮廓提取包括两个基本内容:1、用轮廓提取算子提取出反映灰度变化的边缘点集。
2、在边缘点集合中剔除某些边界点或填补边界间断点,并将这些边缘连接成完整的线。
用于边缘检测的算子有Sobel、Canny、Deriche1、Deriche2、Lanser1、Lanser2、Shen。
轮廓提取的基本原理图1 轮廓提取基本原理一、轮廓提取工具界面点击轮廓提取中的“设置”按钮,打开设置参数界面,如图2。
图2 轮廓提取工具界面二、轮廓提取的参数解析1、边缘检测方法:Sobel、Canny、Deriche1、Deriche2、Lanser1、Lanser2、Shen。
2、滤波系数:Sobel滤波器的轮廓提取效果与滤波系数无关;Canny提取方法,滤波系数越大,所提取的轮廓越平滑;Deriche1、Deriche2、Lanser1、Lanser2、Shen滤波系数越小,所提取的轮廓越平滑,得到的细节越少。
3、低阈值:边缘检测低阈值,低阈值不能大于高阈值。
范围是[0, 255]。
4、高阈值:边缘检测高阈值,高阈值不能小于低阈值。
边缘检测高低阈值剔除轮廓的逻辑是当轮廓点梯度高于高阈值的时候轮廓点保留,当轮廓点梯度介于高低阈值之间,如果此轮廓点能连接高阈值轮廓则被保留,否则去掉。
当轮廓点梯度低于低阈值,则去掉。
范围是[0, 255]。
5、最短轮廓:轮廓长度的下限。
剔除长度小于该值的轮廓。
范围是[1, 100000],不得大于最大轮廓长度。
6、最长轮廓:轮廓长度的上限。
振动圆二色光谱(vcd)的样品测试
振动圆二色光谱(vcd)的样品测试
振动圆二色光谱(VCD)是手性物质在振动频率范围内对于左旋圆偏振光和右旋圆偏振光的吸收差
振动圆二色是应用较为广泛的测定蛋白质二级结构的方法,是研究稀溶液中蛋白质构象的一种快速、简单、较的方法。
它可以在溶液状态下测定,较接近其生理状态。
而且测定方法快速简便,对构象变化灵敏,所以它是目前研究蛋白质二级结构的主要手段之一,并已广泛应用于蛋白质的构象研究中。
用于推断非对称分子的构型和构象的一种旋光光谱。
光学活性物质对组成平面偏振光的左旋和右旋圆偏振光的吸收系数(ε)是不相等的,εL≠εR,即具有圆二色性。
如果以不同波长的平面偏振光的波长λ为横坐标,以吸收系数之差Δε=εL-εR为纵坐标作图,得到的图谱即是圆二色光谱,简称CD。
如果某手性化合物在紫外可见区域有吸收,就可以得到具有特征的圆二色光谱。
由于εL≠εR,透射光不再是平面偏振光,而是椭圆偏振光,摩尔椭圆度[θ]与Δε的关系为:[θ]=3300Δε。
振动圆二色也可以摩尔椭圆度为纵坐标,以波长为横坐标作图。
由于△ε有正值和负值之分,所以也有呈峰的正性圆二色谱和呈谷的负性圆二色谱。
在紫外可见光区域测定与旋光谱,其目的是推断有机化合物的构型和构象。
KLA2135的标准操作规程:
1、确认来片的流程单,GUI系统与片盒、圆片、圆片数量是否相符。
2、将需测量的圆片放入标准圆片架(黑色)中,进行理片,找出需检测圆片的Slot位置。
3、确认设备状态是否正常,打开防尘罩门。
4、将测量圆片及片架轻放入片架台,确认片架放在片架台的合适位置。
5、按load键,关闭防尘罩门,片架进入取片位置,机械臂自动扫描。
6、在菜单Main中用鼠标选Run。
7、在Run的菜单下选中Directory。
8、在Name>下输入所需测量的产品名*按Enter,根据层次用鼠标左键选择正确的菜单。
9、在Run的菜单下选中Name Lot,输入批号,按Enter。
10、在Run的菜单下选中Lot Plan,点Edit Plan,鼠标双击左键选择需要测量的圆片位置号,单击右键返
回上级菜单。
11、将Run的菜单下Auto Transfer选中On。
12、在Run的菜单下选中Wafer ID,点Edit ID输入相应的片号,单击右键返回。
13、点Run,开始自动检测。
14、检测结束后记录在Lot Summary窗口中读取并将缺陷数目及缺陷密度的数据记录在流程单及GUI中。
15、按Unload键将片架退出,根据GUI系统判断数据是否超范围,如无将圆片送出,如有通知工艺处理,
处理结束后将圆片送出。
KLA2135手动对位步骤
1、在Run的菜单下选中Directory,在Name>下输入所需测量的菜单。
2、输入需测量的批号,选择需测量的Slot位,输入片号。
3、在Run的菜单下点Mor e→Manual Load→Load Wafer,选择你需要测量的Slot。
4、点Manual Align后跳出蓝色对话框点GO。
5、在低倍下粗对位,将十字导航键移至对位图形旁,点左键,设备自动跳至第二个对位点,重复粗对位
步骤。
6、在高倍下精对位,将十字对位键移至对位图形旁,点左键,设备自动跳至第二个对位点,重复精对位
步骤。
7、跳出的红色对话框选NO,手动对位完成。
AIT的标准操作规程
1、确认来片的流程单,GUI系统与片盒、圆片、圆片数量是否相符。
2、将需测量圆片及片架轻放入片架台,确认片架放在片架台的合适位置。
3、在正常测量操作界面下,用鼠标选中左上方“start”按钮。
4、选择圆片对应的产品名及层次名,点击“OK”。
5、输入批号及机台代号(约定输入AIT),点击“OK”。
6、在弹出的对话框中,选择需要的Slot位,输入对应的片号,点击“OK”,系统开始自动测量。
7、在输入一次批号。
8、若想中途停止测量可点击操作界面左上方“stop”按钮。
9、设备测量结束后,将自动弹出测量结果界面,且只有在跳转到此界面后才可取下片盒。
10、记录测量结果,判断检测数据是否超规范,如未超规范,将该批圆片送出,如超出规范,通知工艺人
员处理。
11、工艺人员处理结束后,将该批圆片送出。
AIT手动测量及手动对位步骤
1、选择需手动测量的程序后进入工程模式,输入密码。
2、点击2.HANDEL再选择1.load进片,输入相应的SLOT位后点击OK。
3、进片完成后点击START,开始测量
4、如无法自动对位的圆片需进行手动对位,设备会跳出对位框,移动对话框右边及底部滑条调整适合划
片槽位置将十字放于横竖划片槽中心手动对位完成。
5、测量完毕后点5.SAVE,选择1.TIFF REVIEW FILE,跳出对话框后输入批号片号后保存。
KLA2138/2139的标准操作规程
1、确认来片的流程单、GUI系统与片盒、圆片、圆片数量是否相符。
2、将需测量的圆片放入标准圆片架(黑色),进行理片,找出需测量圆片的Slot位置。
3、确认设备状态是否正常,打开防尘罩门。
4、将测量圆片及片架轻放入片架台,确认片架放在片架台合适位置。
5、按LOAD键,关闭防尘罩门,片架进入取片位置,机械臂自动扫描。
6、在主菜单Main中用鼠标选Run
7、2138:选Select Inspections,2139:选择Inspection Quene→Add Job→Browse在Inspection Name输入
产品名*点OK,根据层次用鼠标左键选择正确的菜单。
8、选择Lot Plan/Wafer ID菜单,在出现的界面选择所测的Slot位和相对应的片号。
9、在Results Name中输入批号,选择菜单Run。
10、检测结束后记录在Lot Summary窗口中读取并将缺陷数目及缺陷密度的数据记录在流程单及GUI中。
11、按Unload键将片架退出。
根据GUI系统判断数据是否超范围,如无将圆片送出,如有通知工艺处理。
处理结束后将圆片送出。
KLA2138/2139手动对位步骤
1、在主界面下按Run。
2、选择Set up→Select Inspection在Inspection Name中选择所需测量的菜单。
3、在Run界面下点左上角区片键选择需要的Slot点Wafer Load。
4、进片完成后点OK,点界面上的Manual Aligment,跳出对话框点Yes。
5、在低倍下粗对位,将十字导航键移至提示对位旁边点Mark Site,手动移至第二个对位点,重复粗对
位步骤。
6、在高倍下精对位,将十字导航键移至提示对位旁边点Mark Site,手动移至第二个对位点,重复精对
位步骤。
7、完成后跳出选项选择Select Old High Mag Site,设备自动跳至精对位位置,将十字导航键移至该位
置点Mark Site。