第11章 简单机械 第五节 机械效率
- 格式:ppt
- 大小:2.71 MB
- 文档页数:30
九年级物理第十一章简单机械和功§11.1 杠杆1.在物理学中,将一根在力的作用下可绕一固定点转动的硬棒叫做杠杆。
2.杠杆的平衡条件F1·L1=F2·L2。
3.①若L1>L2,F1<F2,则是省力杠杆,费距离;②若L1<L2,F1>F2,则是费力杠杆,省距离;③若L1=L2,F1=F2,则是等臂杠杆。
§11.2 滑轮一、定滑轮:1.轴的位置固定不动的滑轮,称为定滑轮。
2.关系:F=G s=h v=v物3.不省力,但可以改变用力的方向。
(等臂杠杆)二、动滑轮:1.轴的位置随被拉动的物体一起运动的滑轮,称为动滑轮。
2.动力臂(R)是阻力臂(r)的二倍的杠杆。
3.(计摩擦)4.(不计摩擦)5.关系:s=2h V=2V物三、滑轮组:1.滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之一。
2.3.四、水平放置滑轮:S=n S物V=n V物四、如何设计滑轮:G=Fn-G动G动=Fn-G§11.3 功1.力与物体在力的方向通过的距离的乘积,叫做功。
2.W=Fs3.1J=1N·m4.做功条件:一是对物体要有力的作用,二是物体要在力的方向上通过一定的距离。
5.不做功的情况:①F≠0,S=0。
有力没距离,W=0②F=0,S≠0。
有距离没力,W=0③F≠0,S≠0。
F⊥S§11.4 功率1.单位时间内所做的功叫功率。
2.3.1W=1J/s4.1KW=1000W 1MW=1000000 1马力=735W§11.5 机械功率1.利用任何机械都不能省功,但动力所做的功也不会无缘无故消失。
2.总功:动力对机械所做的功。
有用功:对我们有用的功(机械对物体所做的功)。
额外功:利用机械时由于机械有重量及摩擦,不得不做而对我们无用的功。
3.W总=W有用+W额外动h(不计摩擦)4.5.提高机械效率的方法:①减小自重②减小摩擦③尽量满载6.W有=fs物7.8.。

第十一章简单机械和功----滑轮机械效率题型求简单机械的机械效率是初中物理教学的重点内容,也是近年来中考的热点问题。
由于计算中涉及到总功、有用功、额外功等抽象概念,特别是滑轮组的机械效率题目中,同一滑轮组在不同负载情况下机械效率不同,有用功在具体情况中的形式不同,隐含条件的渗入,以及特殊形式的滑轮组等等,在学习的过程中常感觉困惑,易造成错解。
为了解决这类问题,同学们要搞清楚以下几点:要对机械效率公式进行归类细化根据对、、的具体理解,可以将机械效率的定义式进行如下归类:1、在竖直方向上,G是物体重,G动是动滑轮重,h是物体被提升的高度,也是动滑轮被提升的高度。
∴,若绳重及摩擦不计,F是拉力,S是拉力F移动的距离,n是动滑轮上承担力的绳的段数。
,;①②③公式都适合。
若是考虑绳重和摩擦力,用滑轮组把物体提升的高度h,拉力F移动的距离S,总满足S=nh;只可用于①②。
2、在水平方向上,由于物体是匀速运动,滑轮组对物体的拉力F′与水平地面对物体的摩擦力f是一对平衡力,∴,即克服水平面对物体摩擦所做的功在数值上是等于有用功。
3、在斜面方向上,f是物体与斜面之间的摩擦,L是斜面的长,由于克服斜面对物体摩擦所做的功是额外功,所以。
1、2022年冬季奥林匹克运动会主办城市是北京,北京成为第一个举办过夏季奥林匹克运动会和冬季奥林匹克运动会以及亚洲运动会三项国际赛事的城市。
在某场馆建设中,采用如图所示的装置,滑轮组悬挂在水平支架上,工人站在水平地面上,竖直向下拉动绳子自由端,使物体A在5s内匀速上升了1m.已知物体A重400N,该工人重500N,两个滑轮质量相等,不计滑轮组的绳重和摩擦,滑轮组的机械效率为80%.关于该过程,下列说法正确的是()A.水平地面对工人的支持力为300NB.动滑轮重为50NC.人对绳子拉力的功率为120WD.支架受到滑轮组的拉力为850N2、为探究动滑轮和定滑轮的特点,设计如下两种方式拉升重物,下面关于探究的做法和认识正确的是()A.用动滑轮提升重物上升h高度,测力计也上升h高度B.若拉升同一物体上升相同高度,用动滑轮拉力更小,且做功更少C.减小动滑轮质量可以提高动滑轮的机械效率D.若用定滑轮拉重物,当拉力竖直向下最省力3、如图所示,用同一滑轮组分别将物体A和物体B匀速提升相同的高度,与提升B相比,提升A的过程滑轮组的机械效率较大,若不计绳重与摩擦的影响,则提升A的过程A.额外功较小B.额外功较大C.总功较小D.总功较大4、如图所示,小型牵引车通过滑轮组可以将重物匀速吊起,若每次重物均以1 m/s的速度匀速上升,且滑轮的摩擦和绳重均可忽略不计。

简单机械的机械效率归纳常见的简单机械有斜面、杠杆、滑轮、滑轮组、轮轴等,这些工具也可以组合在一起使用。
物体重G,拉力F,物体与斜面间摩
擦力f;
物体被抬升h,物体在斜面上移动
距离s物。
(竖直方向)
物体重G,拉力F,动滑轮重G动;
物体被抬升h,绳子自由端移动距
离s;
有n段绳子与动滑轮相连。
拉力F,物体与平面间摩擦力f;
物体在平面移动距离s物,绳子自由
端移动距离s;
有n段绳子与动滑轮相连。
1/ 2
物体重G,拉力F,物体与斜面间摩
擦力f,动滑轮重G动;
物体被抬升h,物体在斜面上移动
距离s物,绳子自由端移动距离s;
有n段绳子与动滑轮相连。
2/ 2。

简单机械、功、机械效率知识点汇总一、知识体系简单机械 功和机械能功 、力学里所说的功包括两个必要因素:一是作用在物体上的力;二是物体在力的方 、不做功的三种情况:有力无距离、有距离无力、力和距离垂直。
3、力学里规定:功等于力跟物体在力的方向上通过的距离的乘积。
公式:W=FS4、功的单位:焦耳,1J= 1N·m 。
5、应用功的公式注意:①分清哪个力对物体做功,计算时F 就是这个力;②公式中S 一定是在力的方向上通过的距离,强调对应。
③ 功的单位“焦”(牛·米 = 焦),不要和力和力臂的乘积(牛·米,不能写成“焦”)单位搞混。
功的原理1、内容:使用机械时,人们所做的功,都不会少于直接用手所做的功;即:使用任定义:在力的作用下,能绕固定点转动的硬棒五要素:支点、动力、阻力、动力臂、阻力臂概 念:周边有槽,可绕着装在框子里的轴转动的轮子 定滑轮:工作时,轴固定不动的滑轮其他机斜面:省力,费距离。
何机械都不省功。
2、说明:(请注意理想情况功的原理可以如何表述?)①功的原理是一个普遍的结论,对于任何机械都适用。
②功的原理告诉我们:使用机械要省力必须费距离,要省距离必须费力,既省力又省距离的机械是没有的。
③使用机械虽然不能省功,但人类仍然使用,是因为使用机械或者可以省力、或者可以省距离、也可以改变力的方向,给人类工作带来很多方便。
④我们做题遇到的多是理想机械(忽略摩擦和机械本身的重力)理想机械:使用机械时,人们所做的功(FS)= 直接用手对重物所做的功(Gh)3、应用:斜面①理想斜面:斜面光滑②理想斜面遵从功的原理;③理想斜面公式:FL=Gh 其中:F:沿斜面方向的推力;L:斜面长;G:物重;h:斜面高度。
如果斜面与物体间的摩擦为f ,则:FL=fL+Gh;这样F做功就大于直接对物体做功Gh 。
机械效率1、有用功:定义:对人们有用的功。
公式:W 有用=Gh (提升重物)=W 总-W 额=ηW 总斜面:W 有用= Gh2、额外功:定义:并非我们需要但又不得不做的功公式:W 额= W 总-W 有用=G 动h (忽略轮轴摩擦的动滑轮、滑轮组)斜面:W 额=f L3、总功: 定义:有用功加额外功或动力所做的功公式:W 总=W 有用+W 额=FS= W 有用/η斜面:W 总= fL+Gh=FL4、机械效率:① 定义:有用功跟总功的比值。
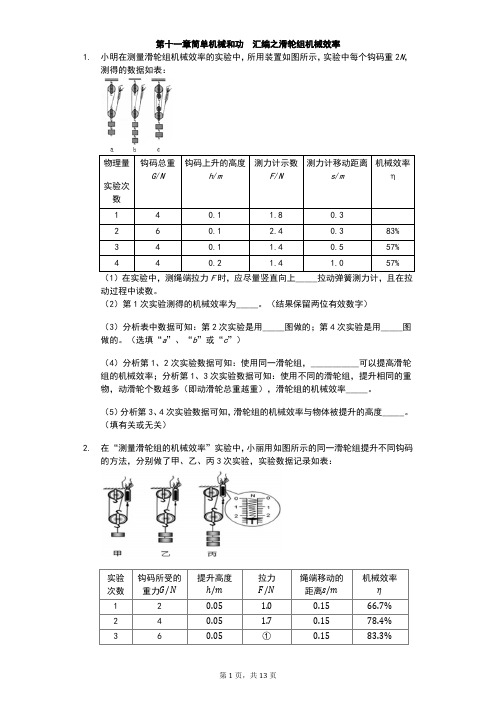
第十一章简单机械和功汇编之滑轮组机械效率1.小明在测量滑轮组机械效率的实验中,所用装置如图所示,实验中每个钩码重2N,测得的数据如表:物理量实验次数钩码总重G/N钩码上升的高度h/m测力计示数F/N测力计移动距离s/m机械效率η1 4 0.1 1.8 0.32 6 0.1 2.4 0.3 83%3 4 0.1 1.4 0.5 57%4 4 0.2 1.4 1.0 57%(1)在实验中,测绳端拉力F时,应尽量竖直向上_____拉动弹簧测力计,且在拉动过程中读数。
(2)第1次实验测得的机械效率为_____。
(结果保留两位有效数字)(3)分析表中数据可知:第2次实验是用_____图做的;第4次实验是用_____图做的。
(选填“a”、“b”或“c”)(4)分析第1、2次实验数据可知:使用同一滑轮组,___________可以提高滑轮组的机械效率;分析第1、3次实验数据可知:使用不同的滑轮组,提升相同的重物,动滑轮个数越多(即动滑轮总重越重),滑轮组的机械效率_____。
(5)分析第3、4次实验数据可知,滑轮组的机械效率与物体被提升的高度_____。
(填有关或无关)2.在“测量滑轮组的机械效率”实验中,小丽用如图所示的同一滑轮组提升不同钩码的方法,分别做了甲、乙、丙3次实验,实验数据记录如表:实验次数钩码所受的重力G/N提升高度ℎ/m拉力F/N绳端移动的距离s/m机械效率η1 2 0.05 1.00.1566.7%2 4 0.05 1.70.1578.4%3 6 0.05①0.1583.3%(1)表格中编号①处数据应为______;(2)分析以上实验数据可以得出如下结论:同一滑轮组的机械效率主要与______有关;(3)若将此滑轮组换一种绕绳方法,不计摩擦及绳重,提升相同的物体时,滑轮组的机械效率______(选填“变大”“变小”或“不变”)。
3. 如表是小华测一滑轮组机械效率时收集的有关数据。
动滑轮重G 动/N 物重G /N钩码上升高度h /m 动力F /N 动力作用点移动距离s /m 滑轮组的机械效率η 1 0.5 1 0.1 0.7 0.3 47.6% 2 0.5 2 0.1 1.1 0.3 ①______ 30.540.120.366.7%(1)请在图甲中画出实验中滑轮组的绕绳方法。

不动可动F 2F 1BAG Ol 1l 2F 1 B B GGAAsh2021年中考物理总复习 专题11 简单机械滑轮、滑轮组、机械效率(知识点+例题)一、滑轮:1.滑轮定义:周边有槽,中心有一转动的轮子叫滑轮。
因为滑轮可以连续旋转,因此可看作是能够连续旋转的杠杆,仍可以用杠杆的平衡条件来分析。
根据使用情况不同,滑轮可分为定滑轮和动滑轮。
2.定滑轮:(1)定义:工作时,中间的轴固定不动的滑轮叫定滑轮。
如下左图所示。
(2)实质:是个等臂杠杆。
(如下中图所示)轴心O 点固定不动为支点,其动力臂和阻力臂都等于圆的半径r ,根据杠杆的平衡条件,可知,因为重物匀速上升可知,则,不省力。
(3)特点:不省力,但可改变力的方向。
所谓“改变力的方向”是指我们施加某一方向的力(图中F 1方向向下)能得到一个与该力方向不同的力(图中得到使重物G 上升的力)。
(4)动力移动的距离与重物移动的距离相等,S=h 。
(如上右图所示)对于定滑轮来说,无论朝哪个方向用力,定滑轮都是一个等臂杠杆,所用拉力都等于物体的重力G 。
(不计绳重和摩擦)【例题1】如图所示用的定滑轮的拉力F 是20N ,匀速提起物体A ,不计摩擦,A 的重力为 N 。
定滑轮实质是 杠杆。
若在拉力F 的作用下,物体A 上升了2m ,则拉力F 做的功为 J 。
【答案】20;等臂;40。
【解析】拉力F 是20N ,匀速提起物体A ;F1向上向上OF2GF1l1l2hs=2h因为是定滑轮,所以G=F=20N,定滑轮实质是等臂杠杆。
动滑轮中,拉力移动的距离与物体上升的高度h之间有S=h=2m;所以W=FS=20N×2m=40J。
【变式练习1】如图所示,甲物体重6N,乙物体重10N,弹簧秤重力及摩擦均不计。
则当甲、乙两物体静止时,弹簧秤的读数为 N。
【答案】6【解析】当图中的装置静止时,它们受到的都是平衡力的作用。
甲的重力为6N,它对弹簧秤的拉力就是6N,两侧拉力平衡,因此,乙端对弹簧秤的拉力也是6N,即弹簧测力计的示数为6N。
11.1杠杆一、杠杆1.疋义:在物理学中,将一根在力的作用下可绕一固疋点转动的硬棒称做杠杆。
2.五要素:支点(0)杠杆绕着转动的点。
动力(F1)—使杠杆转动的力。
阻力(F2)—阻碍杠杆转动的力。
动力臂(L1)从支点到动力作用线的垂直距离。
阻力臂(L2)――从支点到阻力作用线的垂直距离。
注意:⑴力臂一一从支点到力的作用线的垂直距离。
⑵力臂作图的步骤:①找支点②找力的作用线③作点到线的垂直距离④标明力臂名称。
二、杠杆的平衡条件1. 探究杠杆的平衡条件⑴杠杆处于平衡状态的情况:①静止状态②匀速转动⑵调节杠杆在水平位置平衡的方法: 调节杠杆两端的平衡螺母(左高向左,右高向右调,两边平衡螺姆调节方向一至。
)⑶调节杠杆在水平位置平衡的目的:①便于测量力臂②克服杠杆自重的影响⑷实验记录表:注:多次实验的目的是——从一般现象中总结出普遍的规律。
⑸杠杆的平衡条件:动力X动力臂=阻力X阻力臂数学表达式:F1 L1 = F2 L2⑹杠杆的平衡条件也称为杠杆原理,最早是由古希腊学者阿基米德总结出来的。
2. 杠杆的分类:⑴省力杠杆:①特点:动力臂大于阻力臂②优点:省力③缺点:费距离④例如:羊角锤、手推车、剪铁皮的剪刀、老虎钳、撬棒等⑵费力杠杆:①特点:动力臂小于阻力臂②优点:省距离③缺点:费力④例如:筷子、镊子、笤帚、船桨、裁衣剪刀、钓鱼竿、理发的剪刀等⑶等臂杠杆:①特点:动力臂等于阻力臂②优点:既不省力也不省距离③例如:托盘天平、定滑轮等11.2滑轮一、定滑轮1. 定义:使用滑轮时,轴的位置固定不动的滑轮,称为定滑轮。
2. 实质:等臂杠杆3. 结构示意图:4. 探究使用定滑轮的特点实验序号钩码所受的重力G/N弹簧测力计的示数F/N①②③⑵定滑轮的特点:①使用定滑轮不能省力;②使用定滑轮可以改变用力的方向;③使用定滑轮可以改变拉力的方向,但不能改变拉力的大小保持不变)。
二、动滑轮1. 动义:使用滑轮时,轴的位置随被拉物体一起运动的滑轮,称为动滑轮。