Canny边缘检测器.ppt
- 格式:ppt
- 大小:1.14 MB
- 文档页数:22
基于sobel和canny的边缘检测原理
Sobel的原理:
Sobel 算子是图像处理中的算子之一,主要用作边缘检测。
它是一种离散性差分算子,用来运算图像亮度函数的梯度之近似值。
在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量.
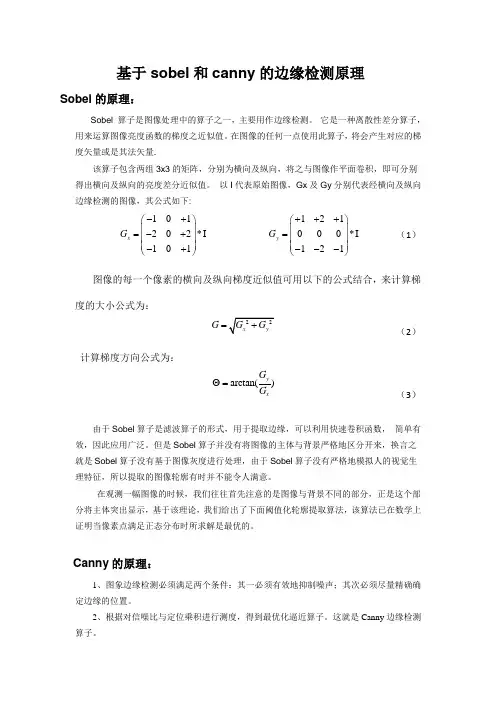
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
以I代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:
由于Sobel算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数,简单有效,因此应用广泛。
但是Sobel算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel算子没有基于图像灰度进行处理,由于Sobel算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。
在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们给出了下面阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。
Canny的原理:
1、图象边缘检测必须满足两个条件:其一必须有效地抑制噪声;其次必须尽量精确确
定边缘的位置。
2、根据对信噪比与定位乘积进行测度,得到最优化逼近算子。
这就是Canny边缘检测
算子。
3、类似于LoG边缘检测方法,属于先平滑后求导数的方法。
Canny边缘检测算法可以分为四个步骤:
1)用高斯滤波器平滑图象;
2)用一阶偏导的有限差分来计算梯度的幅值和方向;3)对梯度幅值进行非极大值抑制
4)用双阈值算法检测和连接边缘。
边缘检测算子图像配准的方法7.4.1 基于特征的图像配准基于特征的图像配准首先提取图像信息的特征,然后以这些特征为模型进行配准。
特征提取的结果是一含有特征的表和对图像的描述,每个特征由一组属性表示,对属性的进一步描述包括边缘的定向和弧度、区域的大小等。
局部特征之间存在着相互关系,如几何关系、辐射度量关系、拓扑关系等。
可以用这些局部特征之间的关系描述全局特征。
通常基于局部特征配准大多都是基于点、线或边缘的,而全局特征的配准则是利用局部特征之间的关系进行配准的方法。
由于图像的特征点比图像的像素点要少很多,因此大大减少了配准过程的计算量,但特征提取方法的计算代价通常较大,不便于实时应用。
特征点的配准度量值对位置的变化比较敏感,可以大大提高配准的精确程度。
对于纹理较少的图像区域提取的特征的密度通常比较稀少,局部特征的提取就比较困难。
特征点的提取过程可以减少噪声的影响,对灰度变化、图像形变和遮挡等都有较好的适应能力。
因此,在图像配准领域得到了广泛应用。
基于特征的图像配准方法有两个重要环节:特征提取和特征配准。
7.4.2 基于互信息的图像配准医学图像配准技术从基于特征的配准方法发展到基于统计的配准方法有其突破性的意义。
与基于特征的配准方法相比,基于统计的配准方法的突出优点为鲁棒性好、配准精度高、人工干预少。
基于统计的配准方法通常是指最大互信息的图像配准方法。
基于互信息的图像配准是用两幅图像的联合概率分布与完全独立时的概率分布的广义距离来估计互信息,并作为多模态医学图像配准的测度。
当两幅基于共同的解剖结构的图像达到最佳配准时,它们的对应像素的灰度互信息应为最大。
由于基于互信息的配准对噪声比较敏感,首先,通过滤波和分割等方法对图像进行预处理。
然后进行采样、变换、插值、优化从而达到配准的目的。
基于互信息的配准技术属于基于像素相似性的方法。
它基于图像中所有的像素进行配准,基于互信息的图像配准引入了信息论中的概念,如熵、边缘熵、联合熵和互信息等,可使配准精度达到亚像素级的高精度。
1、边缘检测原理及步骤在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。
结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。
在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。
这就使得在边缘检测中首先要进行的工作是滤波。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。
常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。
增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。
在具体编程实现时,可通过计算梯度幅值来确定。
3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。
实际工程中,常用的方法是通过阈值化方法来检测。
2、Canny边缘检测算法原理JohnCanny于1986年提出Canny算子,它与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法。
本节对根据上述的边缘检测过程对Canny检测算法的原理进行介绍。
2.1 对原始图像进行灰度化Canny算法通常处理的图像为灰度图,因此如果摄像机获取的是彩色图像,那首先就得进行灰度化。
对一幅彩色图进行灰度化,就是根据图像各个通道的采样值进行加权平均。
Canny边缘检测图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。
图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。
根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。
本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。
1、边缘检测原理及步骤在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。
结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。
在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。
这就使得在边缘检测中首先要进行的工作是滤波。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。
常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释1.引言1.1 概述边缘检测是图像处理中的一个重要任务,它广泛应用于计算机视觉、图像分析和模式识别等领域。
边缘检测的目标是找到图像中不同区域之间的边界,并将其表示为像素强度的变化。
Canny边缘检测算法是一种经典且常用的边缘检测方法。
它通过一系列的图像处理步骤来提取图像中的边缘信息。
Canny算法的特点是能够检测出细且准确的边缘,并且对于图像中的噪声具有较好的抵抗能力。
Matlab是一种功能强大的数学软件,广泛应用于科学计算、数据可视化和图像处理等领域。
Matlab提供了丰富的图像处理函数和工具箱,其中包括了Canny边缘检测的实现代码。
本文的主要目的是介绍Matlab中Canny边缘检测的代码实现,并结合Hough变换算法进行边缘检测的应用。
通过使用Matlab中的相关函数和工具,我们可以有效地实现Canny边缘检测,并结合Hough变换来进一步处理和分析图像中的边缘特征。
本文将首先回顾Canny边缘检测算法的原理和步骤,然后介绍Matlab中的Canny边缘检测代码的使用方法。
接着,我们将介绍Hough 变换算法的原理和应用,并展示如何将Canny边缘检测与Hough变换相结合来实现更精确的边缘检测。
最后,我们将对Canny边缘检测和Hough变换的优缺点进行讨论,总结这两种方法在边缘检测中的应用。
同时,我们也将展望未来的研究方向,探讨如何进一步改进和优化边缘检测算法,以满足不断发展的图像处理需求。
通过阅读本文,读者将能够理解Canny边缘检测算法和Hough变换算法的原理,掌握Matlab中相关代码的使用方法,并了解边缘检测在实际应用中的优势和局限性。
希望本文能为读者在图像处理领域的学习和研究提供一定的帮助和启示。
文章结构是指文章的整体框架和组织形式。
一个良好的文章结构可以使读者更好地理解和领会文章的内容,同时也有助于文章的逻辑性和条理性。
matlab中canny边缘检测算法的实现【Matlab中Canny边缘检测算法的实现】引言:边缘检测是计算机视觉和图像处理领域中的一项重要任务,主要用于提取图像中物体的轮廓或边界。
在边缘检测算法中,Canny算法是一种非常经典和常用的方法,由John F. Canny于1986年提出。
该算法被广泛应用于计算机视觉领域,实现了较好的边缘检测效果和低误报率。
本文将详细介绍在Matlab中实现Canny边缘检测算法的步骤和原理。
1. 算法原理:Canny边缘检测算法主要包含以下几个步骤:(1)使用高斯滤波平滑图像,减少噪声的影响。
(2)计算图像的梯度幅值和方向,确定图像中的强边缘。
(3)应用非极大值抑制算法,细化边缘。
(4)通过双阈值处理,进一步筛选边缘像素。
(5)连接边缘像素,得到最终的边缘结果。
2. 算法实现步骤:在Matlab中,我们可以利用内置函数和库函数来实现Canny边缘检测算法。
下面将一步一步介绍具体的实现过程。
2.1 加载图像:首先,我们需要加载一张待处理的图像。
可以使用imread函数加载图像,例如:img = imread('image.jpg');2.2 灰度化处理:Canny算法通常在灰度图像上进行,因此我们需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数实现:grayImg = rgb2gray(img);2.3 高斯滤波:为了减少噪声的影响,我们需要对图像进行平滑处理。
可以使用fspecial函数创建高斯滤波器,然后使用imfilter函数对灰度图像进行滤波。
示例代码如下:filterSize = 5; % 设置滤波器尺寸sigma = 1; % 设置高斯分布的标准差gaussianFilter = fspecial('gaussian', [filterSize filterSize], sigma); smoothImg = imfilter(grayImg, gaussianFilter, 'symmetric');2.4 计算梯度幅值和方向:接下来,我们需要计算图像中每个像素的梯度幅值和方向。

Canny边缘检测算法的流程介绍边缘检测的⼀般标准包括:1) 以低的错误率检测边缘,也即意味着需要尽可能准确的捕获图像中尽可能多的边缘。
2) 检测到的边缘应精确定位在真实边缘的中⼼。
3) 图像中给定的边缘应只被标记⼀次,并且在可能的情况下,图像的噪声不应产⽣假的边缘。
在⽬前常⽤的边缘检测⽅法中,Canny边缘检测算法是具有严格定义的,可以提供良好可靠检测的⽅法之⼀。
由于它具有满⾜边缘检测的三个标准和实现过程简单的优势,成为边缘检测最流⾏的算法之⼀。
Canny边缘检测算法的处理流程Canny边缘检测算法可以分为以下5个步骤:1) 使⽤⾼斯滤波器,以平滑图像,滤除噪声。
2) 计算图像中每个像素点的梯度强度和⽅向。
3) 应⽤⾮极⼤值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
4) 应⽤双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5) 通过抑制孤⽴的弱边缘最终完成边缘检测。
下⾯详细介绍每⼀步的实现思路。
1 ⾼斯平滑滤波为了尽可能减少噪声对边缘检测结果的影响,所以必须滤除噪声以防⽌由噪声引起的错误检测。
为了平滑图像,使⽤⾼斯滤波器与图像进⾏卷积,该步骤将平滑图像,以减少边缘检测器上明显的噪声影响。
⼤⼩为(2k+1)x(2k+1)的⾼斯滤波器核的⽣成⽅程式由下式给出:下⾯是⼀个sigma = 1.4,尺⼨为3x3的⾼斯卷积核的例⼦(需要注意归⼀化):若图像中⼀个3x3的窗⼝为A,要滤波的像素点为e,则经过⾼斯滤波之后,像素点e的亮度值为:其中*为卷积符号,sum表⽰矩阵中所有元素相加求和。
重要的是需要理解,⾼斯卷积核⼤⼩的选择将影响Canny检测器的性能。
尺⼨越⼤,检测器对噪声的敏感度越低,但是边缘检测的定位误差也将略有增加。
⼀般5x5是⼀个⽐较不错的trade off。
2 计算梯度强度和⽅向图像中的边缘可以指向各个⽅向,因此Canny算法使⽤四个算⼦来检测图像中的⽔平、垂直和对⾓边缘。
canny算子原理Canny算子是一种常用于边缘检测的算法,由John F. Canny于1986年提出。
Canny算子是一种基于梯度的算法,它可以在图像中检测出明显的边缘,并将其转化为二值图像,便于后续的处理。
Canny算子的原理主要包括以下几个步骤:1.高斯滤波在进行边缘检测之前,首先需要对原始图像进行高斯滤波,以去除图像中的噪声。
高斯滤波是一种线性平滑滤波器,它可以将图像中的噪声平滑化,同时保留图像中的细节信息。
2.计算梯度幅值和方向在进行边缘检测之前,需要对图像进行梯度计算,以确定图像中的边缘。
梯度是一个向量,它表示函数在某一点的变化率。
在图像中,梯度的方向指向最大变化的方向,梯度的大小表示变化的程度。
在Canny算子中,使用Sobel算子来计算梯度幅值和方向。
Sobel 算子是一种离散差分算子,它可以在图像中计算出每个像素点的梯度幅值和方向。
3.非极大值抑制由于图像中的梯度方向可能非常复杂,如何确定哪些像素点是边缘点是一个非常困难的问题。
为了解决这个问题,Canny算子采用了非极大值抑制的方法。
非极大值抑制的基本思想是,在梯度方向上,只有局部的最大值才可能是真正的边缘点。
因此,对于每个像素点,只有当其梯度方向上的幅值是局部最大值时,才会被保留下来。
4.双阈值处理在进行非极大值抑制之后,图像中的边缘已经被明显地检测出来了。
但是,由于图像中可能存在一些噪声,因此可能会出现一些假边缘。
为了解决这个问题,Canny算子采用了双阈值处理的方法。
双阈值处理的基本思想是,将图像中的像素点分为三类:强边缘、弱边缘和非边缘。
强边缘是指梯度幅值大于高阈值的像素点,非边缘是指梯度幅值小于低阈值的像素点,弱边缘是指梯度幅值在高低阈值之间的像素点。
在双阈值处理中,强边缘被保留下来,非边缘被丢弃,而弱边缘则需要进一步处理。
通常情况下,弱边缘会被与强边缘连接起来,形成完整的边缘。
5.边缘跟踪在进行双阈值处理之后,图像中的边缘已经被明显地检测出来了。
2 Canny边缘检测基本原理Canny边缘检测器是高斯函数的一阶导数,是对信噪比与定位之乘积的最优化逼近算子[1]。
Canny认为好的边缘检测具有3个特点:(1)低概率的错标非边缘点和低概率不标真实边缘点;(2)检测出来的边缘点应该尽可能的靠近真实边缘中心;(3)边缘响应是单值的。
设表示两维高斯函数,表示图像;Canny边缘检测算子为式中:是边缘曲线的法向量,由于事先不知道边缘的方向,所以取。
那么边缘点是方程的解,即然后通过双阈值去掉伪边缘,Canny算子检测到的是边缘点是高斯函数平滑后的图像拐点。
Canny算法的实现步骤:Step1:用高斯滤波器平滑图像,去除图像噪声。
一般选择方差为1.4的高斯函数模板和图像进行卷积运算。
Step2:用一阶偏导的有限差分来计算梯度的幅值和方向。
使用的梯度算子计算x和y方向的偏导数和,方向角,梯度幅值。
Step3:对梯度幅值应用非极大值抑制。
幅值M越大,其对应的图像梯度值也越大,但这还不足以确定边缘,因为这里仅把图像快速变化的问题转化成求幅值局部最大值问题,为确定边缘,必须细化幅值图像中的屋脊带,只保留幅值局部变化最大的点,生成细化的边缘。
Step4:用双阈值算法检测并且连接边缘。
双阈值法使Canny算子提取的边缘点更具有鲁棒性,高低阈值分别表示为Hth和Lth,对于高阈值Hth的选折,基于计算出的图像梯度值对应的直方图进行选取。
在一幅图像中,非边缘点数目在总图像像素点数目中占的比例表示为Hratio,根据图像梯度值对应的直方图累加,累加数目达到总像素数目的Hratio时,对应的图像梯度值设置为Hth,在文中设定Hratio为0.7。
低阈值Lth的选择通过Lth=Lratio*Hth得到,文中Lratio设定为0.4。
最后通过对边缘点的标记和领域关系进行连接得到最后的边缘检测图。
3亚像素级Zernike矩算子精确定位边缘Zernike矩算子的基本思想是通过计算每个像素点的4个参数来判断该点是否为边缘点。
[转]⼏种图像边缘检测算⼦的⽐较 不同图像灰度不同,边界处⼀般会有明显的边缘,利⽤此特征可以分割图像。
需要说明的是:边缘和物体间的边界并不等同,边缘指的是图像中像素的值有突变的地⽅,⽽物体间的边界指的是现实场景中的存在于物体之间的边界。
有可能有边缘的地⽅并⾮边界,也有可能边界的地⽅并⽆边缘,因为现实世界中的物体是三维的,⽽图像只具有⼆维信息,从三维到⼆维的投影成像不可避免的会丢失⼀部分信息;另外,成像过程中的光照和噪声也是不可避免的重要因素。
正是因为这些原因,基于边缘的图像分割仍然是当前图像研究中的世界级难题,⽬前研究者正在试图在边缘提取中加⼊⾼层的语义信息。
在实际的图像分割中,往往只⽤到⼀阶和⼆阶导数,虽然,原理上,可以⽤更⾼阶的导数,但是,因为噪声的影响,在纯粹⼆阶的导数操作中就会出现对噪声的敏感现象,三阶以上的导数信息往往失去了应⽤价值。
⼆阶导数还可以说明灰度突变的类型。
在有些情况下,如灰度变化均匀的图像,只利⽤⼀阶导数可能找不到边界,此时⼆阶导数就能提供很有⽤的信息。
⼆阶导数对噪声也⽐较敏感,解决的⽅法是先对图像进⾏平滑滤波,消除部分噪声,再进⾏边缘检测。
不过,利⽤⼆阶导数信息的是基于过零检测的,因此得到的边缘点数⽐较少,有利于后继的处理和识别⼯作。
各种算⼦的存在就是对这种导数分割原理进⾏的实例化计算,是为了在计算过程中直接使⽤的⼀种计算单位。
1.Sobel算⼦其主要⽤于边缘检测,在技术上它是以离散型的差分算⼦,⽤来运算图像亮度函数的梯度的近似值, Sobel算⼦是典型的基于⼀阶导数的边缘检测算⼦,由于该算⼦中引⼊了类似局部平均的运算,因此对噪声具有平滑作⽤,能很好的消除噪声的影响。
Sobel算⼦对于象素的位置的影响做了加权,与Prewitt算⼦、Roberts算⼦相⽐因此效果更好。
Sobel算⼦包含两组3x3的矩阵,分别为横向及纵向模板,将之与图像作平⾯卷积,即可分别得出横向及纵向的亮度差分近似值。
基于CANNY边缘检测的人脸识别技术摘要生物特征识别技术使用了人体本身所固有的生物特征,与传统的身份识别方法完全不同,具有更高的安全性、可靠性和有效性,越来越受到人们的重视。
人脸识别技术作为生物特征识别技术的重要组成部分,在近三十年里得到了广泛的关注和研究,已经成为计算机视觉、模式识别领域的研究热点。
人脸识别在公共安全、证件验证、门禁系统、视频监视等领域中都有着广泛的应用前景。
本文使用的方法是基于24位彩色图像对人脸进行canny边缘提取识别,并通过基于canny算子的边缘检测算法实现了人脸轮廓的提取,这样就确定了识别的有效区域。
本文介绍的重点是图像处理,同时也讨论了相关的图像预处理技术,整个过程包括:图像获取、图像预处理和模式识别等过程。
主要用到的图像处理技术是:光线补偿、图像灰度化、高斯平滑、对比度增强、二值化和边缘提取。
经过特征标记、特征提取、最后与数据库比对查找并显示结果。
使用matlab对样本图片进行了处理,并给出了相关程序和图片处理的效果图。
关键词:CANNY,人脸识别, 边缘提取,变换AbstractBiometric identification technology using the body itself inherent biological characteristics, and the traditional identification methods are completely different, with more safety, reliability and validity, and people pay more and more attention. The technology of face recognition as a biological feature recognition technology is an important component of, in the past thirty years has been widespread concern and research, computer vision, pattern recognition has become a research hotspot in the field of. Face recognition in public security, certificate verification, access control systems, video surveillance and other fields have broad application prospects.The method is based on the24 bit color image of face recognition Canny edge extraction, and through canny based edge detection algorithm to achieve the face contour extraction, so as to determine the identification of effective area. This article focuses on the introduction of image processing, and also discusses the relevant technology of image pretreatment, the whole process includes: image acquisition, image processing and pattern recognition process.The main use of the image processing technology is: light compensation, image, Gauss smooth, contrast enhancement, two values and edge extraction. After the signature, feature extraction, and finally databases than search and display the results. The use of MA TLAB on sample images were processed, and gives the relevant procedures and picture processingeffect.Key words: CANNY, face recognition, edge extraction, transformation目录摘要 (1)关键词 (1)1绪论 (5)1.1生物识别技术及其特征 (5)1.2人脸识别的发展历史 (5)1.3人脸识别定义与意义 (6)1.4人脸识别优点 (6)1.5人脸技术的难点 (7)1.6人脸识别发展趋势 (8)1.7人脸识别常用方法 (10)2人脸识别总体设计 (12)2.1总体结构设计 (12)2.2方案概述 (13)2.2.1图像灰度变换 (14)2.2.2 直方图均衡 (14)2.2.3 滤波 (15)2.2.4 边缘提取 (16)2.3人脸检测定位算法 (18)2.4人脸定位模块 (19)3 图像预处理 (20)3.1引言 (20)3.2M A TLAB简介 (20)3.3图像处理及过程 (20)3.3.1 图像的灰度化 (21)3.3.2 直方图均衡 (22)3.3.3 滤波去噪 (23)3.3.5 图像的边缘检测 (27)4人脸特征的提取与识别 (33)4.1人脸定位 (33)4.2人脸识别流程图 (34)4.3人脸图像采集实例 (37)4.4模板匹配 (39)4.5人脸数据库 (41)4.6系统软硬件平台 (43)4.7系统执行界面 (43)4.8系统软件实现介绍 (44)5系统测试 (45)5.1评价人脸识别系统的标准 (45)5.2测试的原则 (45)5.3测试结果 (46)结论 (47)参考文献 (49)致谢 (50)1绪论目前,在个人身份鉴别中主要依靠ID卡和密码等传统手段,这些传统手段的安全性能较低,都是基于“What he possesses”或“What he remembers”的简单身份鉴别,离真正意义上的身份鉴别“Who he is”还相差甚远。