无人机操控技术课件第5-6章
- 格式:pptx
- 大小:7.38 MB
- 文档页数:75





无人机培训教材第一章引言无人机,又称无人驾驶飞行器(UnmannedAerialVehicle,UAV),是一种通过遥控或自主飞行方式进行各种任务的航空器。
随着科技的发展,无人机在各个领域中的应用越来越广泛,如航拍、农业、物流、环境监测等。
为了确保无人机安全、高效地运行,提高无人机驾驶员的操作技能和理论知识,本教材旨在为无人机操作者提供全面、系统的培训内容。
第二章无人机基础知识2.1无人机分类与结构无人机按照用途可分为军用、民用和商业无人机;按照飞行原理可分为固定翼无人机、旋翼无人机和多旋翼无人机。
无人机的结构主要包括飞行器、导航系统、遥控系统、任务设备等部分。
2.2飞行原理与飞行性能无人机飞行原理主要包括空气动力学、飞行力学、飞行控制等。
飞行性能参数有飞行速度、飞行高度、续航时间、载重能力等。
2.3导航与飞控系统导航系统负责无人机的定位、导航和飞行路径规划。
飞控系统负责无人机的稳定飞行、姿态控制、自动起飞、着陆等功能。
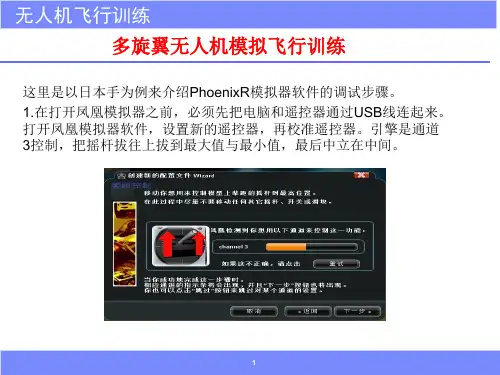
第三章无人机操作技能培训3.1遥控器操作遥控器是无人机飞行操作的主要工具,操作者需熟练掌握遥控器的各个功能键、摇杆、开关等操作方法。
3.2起飞与着陆起飞与着陆是无人机飞行过程中最关键的操作环节。
操作者需掌握起飞、悬停、着陆等基本动作,确保无人机安全起飞和着陆。
3.3飞行姿态控制飞行姿态控制是无人机飞行过程中保持稳定的关键。
操作者需掌握无人机的前进、后退、上升、下降、左转、右转等飞行姿态控制方法。
3.4自动飞行与任务设备操作操作者需掌握无人机的自动飞行模式、航线规划、任务设备操作等技能,实现无人机的高效作业。
第四章无人机法规与安全4.1无人机法规无人机驾驶员需遵守国家关于无人机的相关法规,包括飞行空域、飞行高度、飞行速度等限制。
4.2飞行安全飞行安全是无人机飞行过程中的重要环节。
操作者需了解飞行安全知识,掌握应对突发状况的方法。
第五章无人机维护与保养5.1无人机检查与维护无人机在使用过程中需定期进行检查和维护,确保飞行安全。