长春理工大学光电工程学院相位激光测距仪方案设计
- 格式:docx
- 大小:528.52 KB
- 文档页数:23
基于相位法的激光测距系统设计与仿真
激光测距作为一种测量技术,与其它测量手段相比,因其具有非接触式、测量速度快、测量精度高、测量距离远、抗干扰能力强等独特优势而被广泛应用于多种领域。
在智能交通领域中,如汽车防撞系统、无人驾驶汽车等,都是通过车辆上安装的激光测距传感器实现道路安全识别的功能,激光测距技术的应用对于道路交通安全起到了重大作用。
针对国内激光测距中测量精度不高,设计复杂等问题,本论文从多种角度分析了影响激光测距系统精度的因素,以提高系统测量精度、简化系统电路结构、降低系统设计成本为目标,设计了一种基于相位法的激光测距系统。
在相位法测距原理和差频测相原理的理论基础支撑上,搭建了基于相位法的激光测距系统。
在时钟生成模块,设计了基于CPLD控制的LMK04000时钟生成电路,在分析了时钟相位噪声对测量系统误差影响以及时钟信号中谐波对系统测量的影响,提出了简化时钟电路的设计方案。
通过分析光电二极管放大电路的噪声以及系统的最远可探测距离影响因素,对光电二极管放大电路进行了优化设计,降低了电路输
出总噪声;改进了激光调制驱动电路,提高了驱动电路的驱动功率。
设计了差频输出模块电路,将高频信号频率降至低频信号,降低了对于AD芯片的采样频率要求。
在完成系统电路设计的基础上,对系统各模块电路进行了仿真,通过仿真结果可
以看出各个模块电路能够实现其相应功能,验证了系统的可行性。
本论文设计的基于相位法的激光测距系统基本可以达到预期的设计要求。
激光测距仪项目实施方案一、项目背景二、项目目标1.开发一种最大测量距离为100米、精度小于1毫米的激光测距仪;2.实现便携式设计,方便携带和操作;3.开发用户友好的界面,方便用户进行测量并显示测量结果。
三、项目计划1.需求调研:对市场需求和竞争对手进行调研,了解用户对激光测距仪的需求以及市场上已有的产品特点。
2.技术研究:对激光测距原理进行深入研究,了解各项技术指标和关键技术,制定技术实现方案。
3.设计与开发:根据技术实现方案,进行激光测距仪的设计和开发,包括硬件设计、软件开发和界面设计等。
4.样机制作:制作激光测距仪的样机进行测试和验证,对原型进行调试和改进,确保其达到设计要求。
5.批量生产:根据样机的测试结果,进行生产工艺优化,并进行试生产,确保产品质量和生产效率。
6.市场推广:制定市场推广计划,将产品推广到目标用户群体中,提高产品知名度和销售量。
四、项目组织与人员分工1.项目经理:负责整个项目的组织和协调工作,对项目进度和质量进行监控和控制。
2.技术研究人员:负责对激光测距原理进行研究,制定技术实现方案。
3.硬件设计师:负责激光测距仪的硬件设计和样机制作。
4.软件工程师:负责激光测距仪的软件开发和界面设计。
5.测试与质量控制人员:负责对激光测距仪的样机进行测试和验证,确保产品达到设计要求。
6.市场推广人员:负责市场调研和产品推广,提高产品知名度和销售量。
五、项目风险分析与应对措施1.技术风险:可能由于技术原因导致测距仪的精度不达标。
为减小技术风险,项目组应加强技术研究,引入专家指导,并进行多次实验和测试,确保产品的精度满足要求。
2.供应链风险:可能由于供应商延迟交货或质量不合格导致项目进度延误。
为减小供应链风险,项目组应提前与供应商建立合作关系,并进行供应商的评估和监控。
3.市场风险:可能由于市场需求波动或竞争对手的竞争导致销售不达预期。
为减小市场风险,项目组应进行市场调研,确保产品的竞争力,并采取适当的市场推广策略,提高产品的知名度和销售量。
激光测距毕业设计激光测距毕业设计近年来,随着科技的不断发展,激光测距技术在各个领域得到了广泛的应用。
激光测距技术以其高精度、高速度的特点,成为了许多工程项目中不可或缺的重要工具。
本文将探讨激光测距技术在毕业设计中的应用,并介绍其原理和实施方法。
首先,我们来了解一下激光测距技术的原理。
激光测距技术利用激光器发射出的激光束,经过目标物体的反射或散射后,由接收器接收到反射回来的光信号。
通过测量光信号的时间差,再结合光的传播速度,就可以计算出目标物体与激光器之间的距离。
激光测距技术的精度可以达到毫米级,非常适合进行精确测量。
在毕业设计中,激光测距技术可以应用于多个领域。
例如,在建筑工程中,我们可以利用激光测距技术来测量建筑物的尺寸和形状。
通过激光测距仪,我们可以快速准确地获取建筑物各个部位的距离,并据此进行建筑设计和施工规划。
这对于提高工程的质量和效率具有重要意义。
此外,在机械制造领域,激光测距技术也发挥着重要作用。
例如,在汽车制造过程中,我们可以利用激光测距技术来测量汽车零部件之间的间距和位置,以确保装配的精度和一致性。
同时,激光测距技术还可以用于检测机械零件的尺寸和形状,以及进行机械加工过程中的实时监控。
除了建筑工程和机械制造,激光测距技术还可以应用于其他领域。
例如,在地质勘探中,我们可以利用激光测距技术来测量地下岩层的厚度和距离,以帮助矿产勘探和地质灾害预测。
在环境监测中,激光测距技术可以用于测量大气污染物的浓度和分布,以及水体的深度和流速。
这些应用都对于保护环境和人类生活具有重要意义。
在实施激光测距技术的毕业设计中,我们需要选择适当的激光测距仪和相关设备。
目前市场上有许多不同型号和品牌的激光测距仪可供选择,我们需要根据具体需求来进行选择。
同时,我们还需要学习激光测距技术的基本原理和操作方法,以确保测量的准确性和可靠性。
在进行实际测量时,我们需要注意一些技巧和注意事项。
首先,为了提高测量的精度,我们需要保持激光测距仪与目标物体之间的垂直关系。
激光测距仪项目实施方案
技术性强
一、项目概述
本项目是采用激光测距技术研发激光测距仪,用于利用单跳红外光来测量一些目标物之间的距离,并将测量的距离信息输出用于其他应用。
本项目主要可以实现以下几个功能:根据激光测距测量距离,显示精度高达1cm,测量范围可达到:2m;具备触发功能,可以自动测量距离;可以通过串口向其他设备输出采集的距离值。
二、技术要求
1.激光测距距离测量范围:2m,测量精度:±1cm;
2.具备触发功能:可以通过宏指令(触发信号)来触发传感器,自动测量距离;
3.串口输出模式:支持RS232/RS485/TTL等串口输出;
4.电源要求:DC8V-15V,比如电池等;
5.封装规格:圆形封装,径53mm×高48mm;
6.工作环境:温度-10℃~70℃,湿度20%~90%RH(无凝露);
7.噪声抑制技术:使用高精度数字滤波算法对目标信号进行抑制。
三、硬件设计
1.激光发射模块:采用红外发射二极管和隔离放大模块组成;
2.接收模块:采用红外接收二极管和隔离放大模块组成;
3.电路模块:采用模拟前端与数字后端模块结合,控制信号与激光信号之间的相互调节;。
激光测距方案1. 引言激光测距是一种常见的测量技术,它利用激光束的发射和接收时间来计算物体与测量仪之间的距离。
该技术广泛应用于工程测量、建筑设计、机器人导航等领域。
本文将介绍一种基于激光测距的方案,包括硬件设计和软件算法。
2. 硬件设计2.1 激光发射器激光发射器用于发射激光束。
常见的激光发射器包括激光二极管和激光二极管阵列。
我们选择使用激光二极管阵列,因为它可以发射多个激光束,增加测距的准确性和稳定性。
2.2 光电接收器光电接收器用于接收激光束的反射信号。
常见的光电接收器包括光电二极管和光电二极管阵列。
我们选择使用光电二极管阵列,因为它可以接收多个激光束的反射信号。
2.3 微控制器微控制器用于处理激光发射和接收的信号,并进行距离计算。
我们选择使用高性能的ARM微控制器,它具有足够的计算能力和接口来实现测距算法。
2.4 电源和外设为了正常运行激光测距系统,我们需要提供稳定的电源和适当的外设,如电源管理模块、外部存储器等。
3. 软件算法激光测距的软件算法主要包括激光发射控制、反射信号接收、时间计算和距离计算。
3.1 激光发射控制通过微控制器控制激光发射器发射激光束。
我们可以使用脉冲调制技术控制激光的发射时间和频率,以及调整激光束的强度和方向。
3.2 反射信号接收通过光电接收器接收激光束的反射信号。
我们可以使用模拟信号放大电路将光电接收器的输出信号放大,并使用采样电路将连续信号转换为数字信号。
3.3 时间计算通过微控制器对激光发射和接收的时间进行计算。
我们可以使用计数器或定时器来测量时间差,并将其转换为距离。
3.4 距离计算根据时间计算得到的距离差和传播速度,使用微控制器进行距离计算。
我们可以使用简单的数学公式,如速度等于距离除以时间,来计算物体与测量仪之间的距离。
4. 总结本文介绍了一种基于激光测距的方案。
通过合理选择硬件和设计相应的软件算法,我们可以实现高精度和稳定性的激光测距系统。
激光测距技术在工程测量、建筑设计、机器人导航等领域具有广泛的应用前景。

本科毕业论文(设计)激光测距系统的设计Design of laser ranging system毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
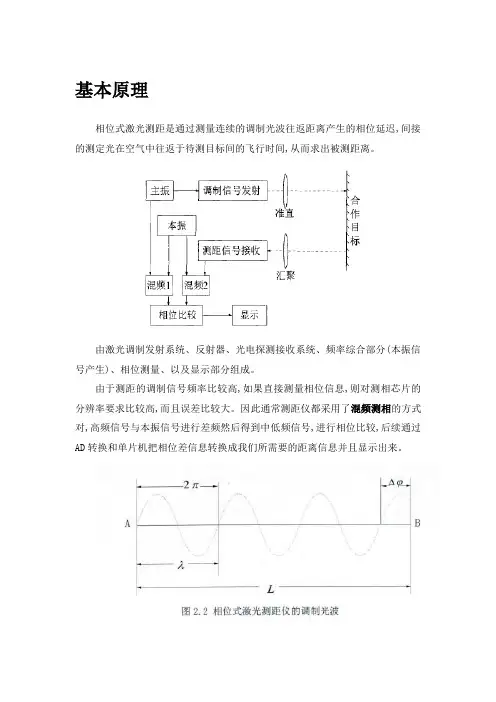
基本原理相位式激光测距是通过测量连续的调制光波往返距离产生的相位延迟,间接的测定光在空气中往返于待测目标间的飞行时间,从而求出被测距离。
由激光调制发射系统、反射器、光电探测接收系统、频率综合部分(本振信号产生)、相位测量、以及显示部分组成。
由于测距的调制信号频率比较高,如果直接测量相位信息,则对测相芯片的分辨率要求比较高,而且误差比较大。
因此通常测距仪都采用了混频测相的方式对,高频信号与本振信号进行差频然后得到中低频信号,进行相位比较,后续通过AD转换和单片机把相位差信息转换成我们所需要的距离信息并且显示出来。
频率选择根据测距仪的设计需要,比如:测量精度、量程、计算简便,选择合适的测尺频率。
测尺频率可由下式确定:相位测量技术相位式激光测距仪中测距光波被接收以后通过测量相位差来计算光波飞行时间,因此相位测量是测距仪中关系到测距精度的一个关键部分。
主要的数字相位测量方法有以下几种:自动数字测相、欠采样同步检测法、向量内积法。
由于相位式激光测仪的测距要求精度比较高,测距光波的调制频率比较高,因此直接进行相位测量,则对器件的要求比较高,现在一般都釆用混频的方式与数字检相搭配使用,这样可以先把高频信号差频成中频或低频信号,然后再进行相位比较。
激光测距仪的总体设计1)采用波长为650mn的半导体激光器做光源,雪崩二极管做光电探测器;2)选用单一的直接测尺方式,测尺频率为lOMHz ,本地振荡信号频率为9.995MHz;3)用AD8002A做光电探测器前置放大电路和带通滤波器;4)用于测相的混频输出信号为5KHz,理论测尺长度为15米。
测相精度在毫米量级;5)使用AD8302做测相芯片,模数转换芯片将模拟信号转换成数字信号,传送给单片机控制系统,并且通过LCD显示出距离;6)采用窄带干涉滤光片来抑制带外噪声。
激光调制:利用有源晶体振荡器来产生lOMHz的高频振荡信号接入调制电路V端,测距回波接收部分光电器件:APD硅光电二极管在体积、响应速度、可靠性上相比其他元件都有非常好的特性,特别是硅材料制成的雪崩光电二极管(Avalanche Photo Diode,简称APD)。
相位法激光测距的理论设计摘要本文介绍了半导体激光技术,并在传统的相位法激光测距原理的基础上, 参考激光测距光学系统设计,运用数字相关检测的测量方法,提出一种把直接数字频率合成(DDS) 技术和数字信号处理(DSP) 技术相结合的新的相位激光测距理论设计,这种设计有助于简化电路、提高相位测距的精度。
关键词:相位激光测距,数字相关检测,数字信号Phase Type Laser Ranging Theoretical Design This article introduced the semiconductor laser technology, and in the traditional phase laser ranging principle foundation, the reference laser ranging optical system design, Using digital correlation detection measuring technique,proposing one kind the new phase laser ranging theoretical design which (DDS) technical and the digital signal processing (DSP) the technology unifies the direct digital frequency synthesis, for could overcome in the traditional phase range finder method the precision to enhance, the measuring range with difficulty difficulty with increases, the electric circuittoo is complex and so on the shortcoming provides has been possible to supply the reference the theoretical design.Key word:PHASE LASER RANGING ,DIGITAL CORRELATION DETECTION ,DIGITAL SIGNAL目录第一章引言 (4)第二章国内外研究状况 (5)第三章激光测距光学系统 (7)3.1 激光测距仪的系统结构 (7)3.2光学系统图示 (8)3.3 光学系统设计主要部件功能与作用 (9)3.4 主要参考性能数据 (10)第四章数字相关检测技术改进方法设计 (11)4.1 激光相位式测距的基本原理 (11)4.2 数字信号处理(DSP)的简述 (13)4.2.1 数字信号处理的主要研究内容 (14)4.2.2 测试信号数字化处理的基本步骤 (14)4.2.3 数字处理信号的优势 (15)4.3 直接数字频率合成技术 (15)4.3.1 DDS的基本工作原理 (16)4.4 改进的数字测相的框图设计 (16)第五章小结 (22)参考文献 (23)致谢 (24)第一章引言第一章引言激光,是一种自然界原本不存在的,因受激而发出的具有方向性好、亮度高、单色性好和相干性好等特性的光。
基于激光拍频高准确度相位式测距方法
姜成昊;杨进华;张丽娟;王晓坤
【期刊名称】《光子学报》
【年(卷),期】2014(0)9
【摘要】介绍一种基于相位式激光测距的高动态、高准确度测距系统.系统引入光频调制技术实现激光拍频产生高频调制信号并完成信号的高速变测尺调制.在对回
波信号进行鉴相时,为降低鉴相偏差采用无窗全相位谱分析并实现对测量信号的相
位计算.计算表明,该方法可以有效抑制频谱泄露,减小噪声对测量结果的影响,提高鉴相准确度.实验表明该测距系统可以有效地解决相位法测距中存在的抗干扰能力差、距离模糊较难抑制等问题,调制信号频率为100 MHz、信噪比为30dB时测距准确度优于0.5mm.
【总页数】5页(P156-160)
【关键词】相位测距;激光测量;拍频;高准确度测量;全相位谱分析;鉴相;相位调制【作者】姜成昊;杨进华;张丽娟;王晓坤
【作者单位】长春理工大学光电工程学院
【正文语种】中文
【中图分类】TN958.98
【相关文献】
1.基于LabVIEW的相位式激光测距系统的软件设计与实现 [J], 蔡薇;李昆
2.基于欠采样谱分析的激光拍频相位式测距方法 [J], 谢文锋;李孟麟;周维虎;李锋;
任建峰
3.提高相位式激光测距分辨率的一种设计方法 [J], 邓岩;赵振明;李佳宇
4.基于飞秒激光模间拍频法的大尺寸测距方法∗ [J], 张晓声;易旺民;胡明皓;杨再华;吴冠豪
5.基于马赫增德尔调制器的相位式激光测距 [J], 刘玉周;朱国力;赵斌
因版权原因,仅展示原文概要,查看原文内容请购买。
高精度相位式激光雷达测距系统的设计
李岸然;邵光存;靳凤宇;张传辉;李伟;牟媛慧;蔡恩林
【期刊名称】《光电工程》
【年(卷),期】2024(51)3
【摘要】现代科技中,激光雷达在自动导航、工业测绘等领域扮演关键角色,但传统相位测距系统普遍存在测量精度低和结构复杂等问题。
本文提出了一种新型的高精度相位式激光雷达测距系统。
该系统采用激光控制同频参比的相位差检测方法,包括对激光发射和接收模块的光学结构优化,以及对接收电路的放大滤波与差分混频处理,最终制作出了一个基于AD8302的高分辨率鉴相系统。
实验结果显示,该系统测量精度为毫米级别,简便实用且能满足广泛的实际应用需求。
这一研究为激光雷达技术在高精度距离测量方面提供了可行的解决方案。
【总页数】10页(P95-104)
【作者】李岸然;邵光存;靳凤宇;张传辉;李伟;牟媛慧;蔡恩林
【作者单位】齐鲁工业大学(山东省科学院);济宁科力光电产业有限责任公司;天津市天锻压力机有限公司;青岛大学电子信息学院
【正文语种】中文
【中图分类】TN959.3
【相关文献】
1.基于LabVIEW的相位式激光测距系统的软件设计与实现
2.新型相位式激光测距系统电路的设计
3.相位式激光测距系统优化设计及仿真
4.相位式激光测距仿真系统的设计与实现
5.中远程相位式激光测距系统设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
相位法激光测距的理论设计(综合最新版)第一篇:相位法激光测距的理论设计(综合最新版)相位法激光测距的理论设计摘要本文介绍了半导体激光技术,并在传统的相位法激光测距原理的基础上, 参考激光测距光学系统设计,运用数字相关检测的测量方法,提出一种把直接数字频率合成(DDS)技术和数字信号处理(DSP)技术相结合的新的相位激光测距理论设计,这种设计有助于简化电路、提高相位测距的精度。
关键词:相位激光测距,数字相关检测,数字信号Phase Type Laser Ranging Theoretical Design This article introduced the semiconductor laser technology, and in the traditional phase laser ranging principle foundation, the reference laser ranging optical system design, Using digital correlation detection measuring technique,proposing one kind the new phase laser ranging theoretical design which(DDS)technical and the digital signal processing(DSP)the technology unifies the direct digital frequency synthesis, for could overcome in the traditional phase range finder method the precision to enhance, the measuring range with difficulty difficulty with increases, the electric circuittoo is complex and so on the shortcoming provides has been possible to supply the reference the theoretical design.Key word:PHASE LASER RANGING,DIGITAL CORRELATION DETECTION,DIGITAL SIGNAL目录第一章引言 (4)第二章国内外研究状况.................................................................................................5 第三章激光测距光学系统 (7)3. 1 激光测距仪的系统结构.........................................................................................7 3.2光学系统图示..........................................................................................................8 3.3 光学系统设计主要部件功能与作用.....................................................................9 3.4 主要参考性能数据...............................................................................................10 第四章数字相关检测技术改进方法设计. (11)4. 1 激光相位式测距的基本原理.............................................................................11 4.2 数字信号处理(DSP)的简述 (13)4.2.1 数字信号处理的主要研究内容....................................................................14 4.2.2 测试信号数字化处理的基本步骤................................................................14 4.2.3 数字处理信号的优势....................................................................................15 4.3 直接数字频率合成技术 (15)4.3.1 DDS的基本工作原理....................................................................................16 4.4 改进的数字测相的框图设计...............................................................................16 第五章小结. (22)参考文献.............................................................................................................23 致谢........................................................................................................................... (24)第一章引言第一章引言激光,是一种自然界原本不存在的,因受激而发出的具有方向性好、亮度高、单色性好和相干性好等特性的光。
摘要相位式激光测距法由于其计算方便、体积小巧、测距精度高等优点,成为最有发展潜力的距离测量技术。
将激光用低频信号进行调制发射,距离信息就隐含在从目标物反射回的调制光波的相位信息中。
测出发射与接收光波之间的相位差,通过适当的换算,即可得到待测距离的实际值。
本文首先介绍了相位式激光测距仪的研究背景、意义,总结和概括了激光测距的有关理论基础,并且介绍了相位式激光测距仪的测距原理,提出了测距系统的实现框图;接着围绕接收系统的性能开展深入研究,主要研究探测器件的选择,偏压电路、混频电路、自动增益控制电路的设计等问题;利用Proteus技术对APD偏压电路和自动增益控制电路进行仿真,通过仿真结果不断完善设计。
关键词:激光测距;雪崩二极管;相位;混频;自动增益控制ABSTRACTThe phase-shift laser ranging becomes the most potential technique owing to its compactness, easily data processing,and the high measurement accuracy. By measuring phase difference between emitted modulated waves and receiving modulated waves which are reflected.From the target, we could get the value of distance quite easily through simple calculation.This paper started from the background, the purposes, meanings of phase-shift laser ranging, then summarized the related theoretical basis of it. The principle of phase laser ranging and a practical ranging system is discussed. This paper concentrate on the researh of improving the porperty of receiving system. Lots of research have done on choosing detection element,design of the bias circuit and automatic gain control circuit.Then,the proteus is used for simulation of them. With the help of the simulation, the design was improved.Keywords:laser ranging, avalanche diode, phase, mixer circuit, automatic gain control山东科技大学学士学位论文目录目录1 绪论 (1)1.1激光测距技术 (1)1.2 激光测距的优点 (4)1.3 国内外研究及发展情况 (4)1.4 课题的研究目的和意义 (6)2 相位式激光测距技术 (8)2.1相位式激光测距技术原理 (8)2.2相位式激光测距多测尺原理 (10)2.3差频测相原理 (12)2.4 自动增益控制原理 (14)2.5光电探测器 (16)3 相位式激光测距仪接收电路的设计........ 错误!未定义书签。
激光测距仪光学系统设计摘要:激光测距仪是利用激光器来对距离进行准确测量的仪器。
相位式激光测距仪工作时会向目标发射一束准直光,由感光元件接收目标漫反射回的光,计算准直光从发射到接收的时间,从而算出从观测者到目标的距离。
本文利用相位式测距原理的激光测距仪,在无合作目标测距时,采用可见激光进行瞄准,这对激光光斑有非常高的要求,激光的准直程度是指光斑在被测目标上的大小,这直接影响到测距精度和测程,所以,激光测距的发射光学系统的设计至关重要,解决这个问题对提高无合作目标的测程和精度都是十分有益的。
关键词:无合作目标;激光;相位测距;激光准直1无合作目标相位激光测距原理将相位式测距系统中的发射器和接收器同轴放置,发射器发出的是调制频率为的正弦调幅波,当发出的激光照射到待测目标点时,物体的表面会发生漫反射,这中间的与发射波同轴的返回波会被探测器所接收。
由于发射波和接收波之间会产生一个相位差,记为,通过测试相位差,就可以得到要测量的距离d。
;其中,c是真空中的光速;为系统的调制频率,通常在10MHz以上。
测距仪的测距能力是由从被测目标反射回探测器的光能量的多少来决定的。
由此探测器接收的最大功率的表达式就是;其中,D是接收透镜直径,是发射光学系统透过率,是接受光学系统透过率,P是发射激光平均功率,是被测物反射率,是被测点法线和测量方向之间的夹角,是大气衰减系数,d是被测距离。
上式是假定反射光照射在目标上产生漫反射,实际调制时一般都采用大口径长焦距平行光管,这就可以使可见激光光源在无穷远处的成像同接收光纤或APD所成的像相重合,接收光纤或者APD都可以用可见光对其表面进行照射,这样在平行光管里就能观察到它的像。
在短程测距时,一般不需要在被测目标上单独放置像棱镜之类的合作目标,只需要利用接收器直接来接收物体表面的漫反射信号,从而实现测距功能,也就是我们所说的无合作目标测距。
便携式无合作目标的激光测距仪体积一般较小,使用方便,主要应用于家庭或室内装修测距。
目录 摘要 引言 31.1国内外研究现状3 1.1.1国外研究现状 41.1.2国内研究现状 52.1课题主要研究内容5 2.2相位法测距原理7 3.1ΔΦ的测定 113.1.1 差频法测多普勒频移11 4.1影响测量精度的因素及处理办法15 5.1大气折射率误差18 优点 19参考文献
激光测距系统设计 摘要 本文主要介绍相位法激光测距基本原理, 详细论述了相位差的自动数字测量方法及其引起的误差.对单次检相的精度、频率漂移、大气折射率等对测距误差的影响进行了分析并提出了具体解决方法. 实现结果表明, 采用相位法测距-6)。D10× 精度可以达到±(5mm+5 。精度激光测距。 相位关键词: AbstractThe authors introduce the basic principle of laser range finding technology based on phase, propound in detail the automatic digital measurement technique of phase difference and its errors,analyze the effect of single phase-picking precision frequency drift and atmosphere refractive etc.on laser ranging errors and put forward index,some special improvement methods The result of laser ranging realization show that adopting phase ±laser ranging can achieve the precision of
-6. )D10×5mm+5(. Keywords:laser range finding。phase。accuracy 1.1引言 激光多普勒测速技术是伴随着激光器的诞生而产生的一种新的测量技术,它是利用激光的多普勒效应来对流体或固体速度进行测量的一种技术,广泛应用于军事,航空,航天,机械,能源,冶金,水利,钢铁,计量,医学,环保等领域。 激光多普勒测速仪是利用激光多普勒效应来测量流体或固体运动速度的一种仪器,通常由五个部分组成:激光器,入射光学单元,接收或收集光学单元,多普勒信号处理器和数据处理系统或数据处理器,主要优点在于非接触测量,线性特性,较高的空间分辨率,快速动态响应及较宽的测量范围,由于采用近代光-电子学和微处理机技术的LDV系统,可以比较容易地实现二维,三维等流动的测量,并获得各种复杂流动结构的定量信息。正因为该技术有如此多的优点,因此近些年得到了人们的广发关注。 1.2国内外研究现状 1.2.1国外研究现状 20世纪中期,激光测距机是激光器在军事上最早应用的工程。世界上第一台激光测距机于1961年诞生在美国休斯飞机公司,称为柯利达I型.经过30年的发展,军用激光测距机已更新了两代,研制发展了三代。第一代激光测距机采用发射0. 6943,cun红外红宝石激光器和光电倍增管探测器,是最早问世的激光测距机.20世纪70年代初期少式,因其隐蔽70、日本的AN/GVS-3量装备部队,如美国的. 性差、效率低、体积大、重量重、耗电多,很快便被第二代激光测距机取代。第二代激光测距机采用发射1. 06,tnn近红外钦激光器(主要是Nd:YAG激光器,少数为钦玻璃激光器)和硅光电二极管或硅雪崩光电二极管探测器。第二代比第一 代隐蔽性好、效率高、小巧、耗电少,因此第二代激光测距机的小型化研制进展迅速。第三代激光测距机,即人眼安全的激光测距机。目前已研制成工作波长为10. 6μm和1. 54μm的三种不同类型的各种型号的人眼安全激光测距机,己进入生产和应用阶段。与此同时,激光测距技术也逐渐应用到民事领域。从20世纪70年代初至今的近30年,国外许多大学、研究机构和公司也开展了这方面的研究工作。 1.2.2国内研究现状 我国激光测距仪的研究始于20世纪50年代,是在原固体、气体激光测距机基础上,发展起来的。目前,基础技术已具备,主要是解决工程应用的问题,开发各种应用产品。1972年,北京光学仪器厂与武汉地震大队等联合研制成国内首台JCY-1型精密气体激光测距仪,1974年研制出了JCY-2型激光测距仪,测程为15-20 km,测距精度±(10mm + 1 ppm x D) 。He-Ne激光管,2. 5 mW,调制方式为石英超种调制频率,测相采用手动方式,速5声外调制,采用了. 度慢。1973-1976年,北京测绘仪器厂与北京大学、北京光学仪器厂、清华大学、国家测绘总局测绘科学研究所和北京市地质地形勘测处分别合作,先后研制成HGC-1型及DCH-1型红外测距仪,精度分别为±1. 5 mm和±5mm,测程分别为l km和1. 5 km。它们采用半导体激光器作为光源,直接内调制方式,2种调制频率。测量时间分别为6.6s和10s。 2.1课题主要研究内容 本文主要任务是完成相位式激光测距技术的研究、设计。整个研究过程,理论分析与实验工作相结合,采取的研究方法为:查阅并收集资料、选择合适的器件,测距理论总体设计和各个部分电路的研究设计,从而给出了整个相位式半导体激光测距系统的电路系统实现方案。整个电路系统包括了四大部分,它们分别是: (1)半导体激光器的调制驱动电路,这部分采用高频正弦信号对激光器的注入电流进行调制,使得激光器光强随注入电流而变化。 (2)光电检测放大滤波电路,这部分采用P-I-N光电二极 管对激光信号进行探测。. (3)锁相环频率综合电路,这部分先对锁相环原理作了简单介绍,然后应用高精度的频率计作频率校准,自动调节本机振荡频率, 确保用作检相的低频信号的频率稳定不变. (4)利用数字测相系统进行测相,最后通过屏幕显示出来。 相位式激光测距是通过测量连续的幅度调制信号在待测距离上往返传播所产生的相位延迟,间接地测定信号传播时间,从而得到被测距离的。这种方法测量精度高,通常在毫M量级。相位式激光测距的原理框图如图2-5所示。它由激光发射系统、频率调制系统、回波接收系统、混频鉴相系统和计数显示系统等组成。激光信号由调制系统调制后,经被测物 反射,接收系统将反射的光信号转换为电信号并进行放大,后转到混频器中进行混频,混频结果又进测中进行测相,最后通过屏幕显示出来。
相位激光测距仪方案设计 学生姓名 专业 学号 指导教师 学院
二〇一六年十一月 摘 要 随着半导体激光器、数字信号处理、精密机械等领域技术的飞跃发展,激光测距仪向着高精度、便携、高速,数字化的方向不断进步。本论文先介绍了激光测距的几种测距方法原理以及国内外现状,着重介绍了相位法测距原理,在这基础上设计了基于相位法测距原理的总体方案。
论文从发射系统和接受系统对总体设计进行了阐述,探讨了激光器选择,光电探测器的选择,光电接受电路,放大电路,混频电路等电路的设计,系统采用了激光二极管作为激光发射器,雪崩二极管作为光电探测器并对系统进行误差分析,最后进行总结和发现不足之处。
关键词 :激光测距,相位式激光测距,光电检测,误差分析
目录 一绪论....................................................................................................................................... 3 1.1引言............................................................................................................................. 3 1.2激光测距 ..................................................................................................................... 3 1.2.1激光测距简介 .................................................................................................. 3 1.2.2激光测距方法 .................................................................................................. 3 1.3激光测距的优点 ......................................................................................................... 6 1.4国内外研究现状 ......................................................................................................... 6 1.5论文研究内容及章节安排 ......................................................................................... 7 第二章相位激光测距原理以及总体方案 ............................................................................... 7 2.1相位激光测距原理 ..................................................................................................... 7 2.2测相原理 ..................................................................................................................... 9 2.3系统整体方案设计 ................................................................................................... 10 第三章 系统设计部分的选择 ............................................................................................. 11 3.1发射部分 ................................................................................................................... 11 3.1.1激光器的选择 ................................................................................................ 11 3.1.2激光二极管的工作原理 ................................................................................ 11 3.1.3调制发射部分 ................................................................................................ 11 3.2接受电路部分 ........................................................................................................... 12 3.2.1光电探测器的选择 ........................................................................................ 12 3.2.2雪崩二极管工作原理 .................................................................................... 13 3.3光电接受电路设计 ................................................................................................... 13 3.3.1光电接收电路 ................................................................................................ 13 3.3.2放大电路设计 ................................................................................................ 13 3.3.3自动增益控制电路 ........................................................................................ 14 3.4其他需要考虑的电路部分 ....................................................................................... 14 3.4.1混频部分 ........................................................................................................ 14 3.4.2后级放大电路 ................................................................................................ 15 第四章相位式激光测距仪误差分析 ..................................................................................... 15 4.1元器件的稳定性 ....................................................................................................... 16 4.2频率误差 ................................................................................................................... 16 4.3电路系统误差 ........................................................................................................... 17 4.4光电探测器噪声引起的误差 ................................................................................... 17 4.5光学误差 ................................................................................................................... 18 第五章 总结和展望 ............................................................................................................... 18 参考文献 ................................................................................................................................. 20