第二讲:舵机原理
- 格式:ppt
- 大小:1.03 MB
- 文档页数:24
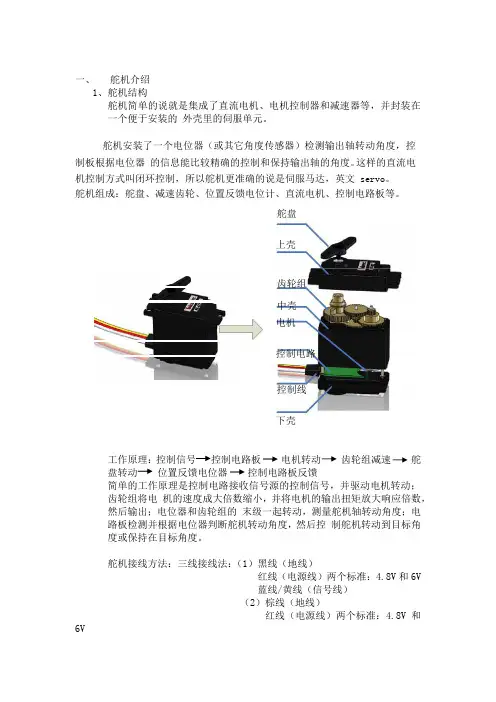
一、舵机介绍1、舵机结构舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo。
舵机组成:舵盘、减速齿轮、位置反馈电位计、直流电机、控制电路板等。
舵盘上壳齿轮组中壳电机控制电路控制线下壳工作原理:控制信号控制电路板电机转动齿轮组减速舵盘转动位置反馈电位器控制电路板反馈简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机接线方法:三线接线法:(1)黑线(地线)红线(电源线)两个标准:4.8V和6V蓝线/黄线(信号线)(2)棕线(地线)红线(电源线)两个标准:4.8V和6V黄线(信号线)二、舵机PWM信号介绍1、PWM信号的定义PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。
具体的时间宽窄协议参考下列讲述。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
关于舵机PWM信号的基本样式如下图其PWM格式注意的几个要点:(1)上升沿最少为0.5mS,为0.5mS---2.5mS之间;(2)控制舵机的PWM信号周期为20ms;2.PWM信号控制精度制定1 DIV = 8uS ; 250DIV=2mSPWM上升沿函数: 0.5mS + N×DIV0uS ≤ N×DIV ≤ 2mS0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS3、舵机位置控制方法舵机的转角达到185度,由于采用8为CPU控制,所以控制精度最大为256份。
简述舵机的结构及工作原理
一、结构
舵机主要由电机、减速器、位置反馈装置、控制电路和输出装置组成。
1. 电机:舵机内置有一种直流无刷电机,可提供高扭矩和精准的速度
控制。
2. 减速器:减速器是将电机提供的高速转动转换成低速高扭矩输出的
装置。
3. 位置反馈装置:位置反馈装置主要是用来检测舵机输出轴的位置,
并将信号反馈给控制电路。
4. 控制电路:控制电路是舵机的核心部件,它接收位置反馈信号,并
控制电机和减速器的运转,以实现舵机的精准定位和转动。
5. 输出装置:输出装置是连接在舵机输出轴上的杆件,其功能是将舵
机的输出扭矩传递给需要控制的机械部件。
二、工作原理
舵机通过接受来自遥控器或其他控制信号,控制舵机电机的轴向转动,从而转动输出装置,实现对机械部件的精准控制。
具体来说,舵机接收到控制信号后,控制电路会通过位置反馈装置来
检测输出轴的位置,并将电机控制器输出的电流的方向和大小进行调整,控制电机的转速和方向,从而实现舵机的转动和定位。
当舵机输出轴达到预设位置后,控制电路会停止控制电机转动,舵机也就完成了定位。
在实际的应用中,舵机通常被用来控制各种机械部件、机器臂或机器人等,实现精准的运动和位置控制。
总的来说,舵机通过精准的电机控制和位置反馈装置的配合工作,实现了对机械部件的精确控制,大大提高了机械装置的性能和精度。
舵机速度控制原理一、简介舵机是一种常见的电机装置,用于控制机器人或其他设备的角度或位置。
舵机速度控制是指调节舵机旋转的速度,使其能够按照预定的速度进行移动。
本文将深入探讨舵机速度控制的原理及相关知识。
二、舵机基本原理舵机的基本原理是通过提供电流来驱动电机转动,同时通过电子电路控制电机的角度。
舵机通常由一个电机、一个位置传感器和一个电子电路组成。
当电流通过电机时,电机开始旋转。
位置传感器会监测电机的角度,并将这一信息传输给电子电路。
电子电路会根据接收到的角度信号,控制电机的转动,使其停留在特定的位置。
三、舵机速度控制原理舵机速度控制是在舵机基本原理的基础上,通过控制电机旋转的速度来实现的。
下面将介绍舵机速度控制的原理和实现方法。
1. PWM信号控制舵机速度的控制是通过改变PWM信号来实现的。
PWM即脉宽调制信号,它的工作原理是通过改变信号的脉冲宽度来控制电机的转速。
舵机所接收的PWM信号通常是一个周期为20ms的方波信号,脉冲宽度在0.5ms到2.5ms之间,其中1.5ms为中间位置。
脉冲宽度越大,舵机转动的角度也越大,速度也就越快。
2. 舵机控制电路为了实现舵机的速度控制,需要添加一个舵机控制电路。
舵机控制电路通常由微控制器、驱动电路和PWM信号发生器组成。
微控制器负责接收输入的速度指令,并将其转换成相应的PWM信号。
驱动电路负责放大电流并驱动电机转动。
PWM信号发生器则用于生成PWM信号,并将其发送给舵机。
3. 控制算法舵机速度控制的实现还需要控制算法的支持。
常见的控制算法有以下几种:•开环控制:根据速度指令直接控制PWM信号的脉冲宽度。
这种方法简单但不够准确,容易受到外界干扰而导致误差增大。
•闭环控制:根据速度指令和实际转速的差异,通过调整PWM信号来控制舵机的速度。
闭环控制能够更精确地控制舵机的速度,但需要额外的位置传感器来监测实际转速。
•PID控制:PID控制是一种常用的闭环控制算法,通过比较实际转速和目标转速的差异,计算出一个修正量,再通过调整PWM信号的脉冲宽度来控制舵机的速度。
舵机的工作原理介绍舵机是一种常见的电动机械驱动装置,广泛应用于遥控模型、机器人、无人机等领域。
舵机的工作原理是通过电路控制电机的转动,并通过一系列机械装置将旋转的运动转化为线性的运动,产生所需的输出力矩。
工作原理舵机的核心是一个直流电机,通常为有刷直流电机。
舵机内部由电机、减速装置和位置反馈装置组成。
其工作原理可以简单分为以下几个步骤:1. 控制信号输入控制信号是通过舵机的控制线输入的,控制线通常使用PWM信号控制。
PWM信号的频率通常为50Hz,控制脉宽的占空比决定了舵机的角度位置。
2. 位置反馈舵机内置一个位置反馈装置,用于检测舵机当前的角度位置。
位置反馈装置通常是一个旋转可变电阻或光电编码器。
3. 控制电路接收到控制信号后,控制电路会根据信号的脉宽来决定控制电机的方向和速度。
控制电路一般由芯片和一些电子元件组成,可以实现对电机的精确控制。
4. 电机驱动控制电路将控制信号转化为适合电机驱动的信号,通过驱动电路将电流传递给电机。
电机驱动通常采用H桥电路,可以实现电机的正反转。
5. 转动和输出力矩电机根据接收到的驱动信号进行转动,通过减速装置将电机的高速旋转转化为舵机输出杆的线性运动。
舵机输出杆的运动产生了力矩,可以控制外部装置的运动。
舵机的应用舵机因其精准的控制能力和可靠的性能,在许多领域得到了广泛应用。
1. 遥控模型舵机常用于遥控模型的控制,例如飞机的方向舵、升降舵,汽车的转向舵等。
舵机可以根据遥控信号实现模型的各种运动,提升遥控模型的趣味性和可玩性。
2. 机器人舵机在机器人领域中也有重要应用,可以控制机器人的肢体运动。
通过配合多个舵机的工作,可以实现机器人的各种复杂动作,如行走、抓取等。
3. 无人机在无人机领域,舵机被广泛用于控制无人机的旋翼和舵面。
舵机可以实现无人机的姿态调整,使其保持平衡和稳定飞行。
舵机的选择和使用注意事项选择合适的舵机对于系统的性能至关重要。
在选择舵机时,需要考虑以下几个因素:1. 动力需求舵机的工作电压和电流要符合系统的需求。
舵机角度控制原理
舵机是一种常见的电机驱动装置,用于控制物体的角度位置。
它由电机、减速装置和反馈控制系统组成,通过控制电机的旋转方向和速度,以实现对舵机输出角度的控制。
舵机的控制原理主要包括以下几个方面:
1. PWM信号控制:舵机通常使用PWM(脉宽调制)信号进
行控制。
PWM信号的高电平时间决定了舵机输出角度的位置,通常情况下,1ms的高电平时间代表舵机输出角度为0度,
2ms的高电平时间代表舵机输出角度为180度。
控制系统通过
改变PWM信号的高电平时间,可以实现对舵机输出角度的控制。
2. 位置反馈:舵机一般都内置了位置反馈装置,通常采用电位器或编码器来实现。
通过位置反馈装置,控制系统可以实时监测舵机的输出角度,从而提供给反馈控制系统进行比较和调整。
这样可以保证舵机输出角度的准确性和稳定性。
3. PID控制算法:PID控制算法是一种常用的控制算法,用于
实现舵机输出角度的精确控制。
PID控制算法根据当前输出角
度与目标输出角度之间的差异,计算出一个控制量,用于调节舵机的电机驱动电压或电流。
PID控制算法可以根据具体应用
的需求进行调优,以实现良好的控制性能。
总结起来,舵机角度控制的原理主要是通过PWM信号控制舵
机的输出角度,借助位置反馈装置实现对输出角度的实时监测
和调整,使用PID控制算法对舵机的驱动电压或电流进行调节,以实现精确且稳定的角度控制。
舵机驱动原理一、舵机概述舵机是一种常见的电动执行器,常用于控制机械运动或位置定位。
它通过接收控制信号,并根据信号的指令来调整输出轴的角度,从而控制连接在输出轴上的物体的运动。
舵机一般由电机、减速装置、控制电路和输出轴组成。
电机负责提供驱动力,减速装置用于降低输出轴的速度,控制电路接收控制信号并控制电机的运行,输出轴则通过转动来影响物体的运动。
二、舵机驱动方式舵机可以通过不同的驱动方式来控制,常见的驱动方式有PWM驱动和模拟驱动。
1. PWM驱动PWM驱动是通过改变控制信号的脉宽来控制舵机的角度。
通常,控制信号的脉宽范围为0.5ms到2.5ms,其中0.5ms对应一个极限角度,2.5ms对应另一个极限角度,1.5ms对应中间位置。
舵机接收到信号后,会根据脉宽的不同来确定要转动到的角度,具体转动的角度与脉宽之间存在一定的线性关系。
2. 模拟驱动模拟驱动是通过将控制信号作为模拟电压来驱动舵机。
通常,控制信号的电压范围为0V到5V,其中0V对应一个极限角度,5V对应另一个极限角度,2.5V对应中间位置。
舵机接收到信号后,会根据电压的不同来确定要转动到的角度,具体转动的角度与电压之间存在一定的线性关系。
三、舵机驱动原理舵机的驱动原理是基于控制信号的输入和输出轴的运动之间的关系来实现的。
1. PWM驱动原理PWM驱动的原理是通过改变控制信号的脉宽来改变输出轴的角度。
当控制信号的脉宽为0.5ms时,舵机会转动到一个极限角度;当控制信号的脉宽为2.5ms时,舵机会转动到另一个极限角度;当控制信号的脉宽为1.5ms时,舵机会转动到中间位置。
舵机内部的控制电路会解析控制信号,并根据脉宽的不同来控制电机的转动,从而实现角度的调整。
2. 模拟驱动原理模拟驱动的原理是通过将控制信号作为模拟电压来改变输出轴的角度。
当控制信号的电压为0V时,舵机会转动到一个极限角度;当控制信号的电压为5V时,舵机会转动到另一个极限角度;当控制信号的电压为2.5V时,舵机会转动到中间位置。

舵机的工作原理舵机是一种常用的电子控制器件,广泛应用于模型飞机、机器人、遥控车辆等领域。
它的主要功能是控制机械装置的转动角度,并能够精确地控制位置和速度。
在本文中,我们将详细介绍舵机的工作原理。
舵机由电机、减速机构、位置反馈装置和控制电路组成。
电机提供动力,减速机构将电机的高速旋转转换为舵机输出轴的低速旋转,位置反馈装置用于检测输出轴的实际位置,控制电路根据反馈信号控制舵机的转动角度。
在舵机的内部,电机通常是一种直流无刷电机,它通过电流控制器来控制转动速度和方向。
减速机构一般采用齿轮传动或蜗杆传动,可以将电机的高速旋转转换为输出轴的低速旋转。
位置反馈装置通常使用电位器或编码器,它们可以检测输出轴的实际位置,并将位置信息反馈给控制电路。
舵机的控制电路是舵机的核心部分,它负责接收控制信号并根据信号控制舵机的转动角度。
控制信号通常是脉冲宽度调制(PWM)信号,其周期为20毫秒,脉宽范围一般为1毫秒到2毫秒。
当脉宽为1毫秒时,舵机转动到最小角度;当脉宽为1.5毫秒时,舵机转动到中间位置;当脉宽为2毫秒时,舵机转动到最大角度。
通过改变脉宽的值,可以精确地控制舵机的转动角度。
舵机的工作原理可以简单概括为:控制电路接收到控制信号后,根据信号的脉宽值计算出目标位置,并与位置反馈装置的信号进行比较。
如果实际位置与目标位置不一致,控制电路将调整电机的转动速度和方向,使输出轴逐渐接近目标位置。
当实际位置与目标位置一致时,控制电路停止调整,舵机保持在目标位置。
舵机的工作原理还与供电电压和负载有关。
舵机通常需要直流电源供电,电压范围一般为4.8V到6V。
如果供电电压过低,舵机可能无法正常工作;如果供电电压过高,舵机可能损坏。
负载对舵机的工作也有影响,过大的负载可能导致舵机无法转动或转动速度变慢。
总结起来,舵机是一种能够精确控制转动角度的电子控制器件。
它由电机、减速机构、位置反馈装置和控制电路组成,通过控制电路接收控制信号并根据信号控制舵机的转动角度。
舵机的工作原理舵机是一种常见的电动执行器,广泛应用于机器人、航模、无人机、自动化设备等领域。
它通过接收控制信号来控制输出轴的角度位置,从而实现精确的位置控制。
舵机的工作原理主要涉及到电机、电子电路和反馈控制系统。
一、电机部分舵机的核心部件是一种直流电机,通常采用永磁直流电机。
该电机由电机转子、电机定子、电刷和永磁体组成。
当电流通过电机定子产生磁场时,磁场与永磁体之间的相互作用会产生转矩,使电机转子转动。
二、电子电路部分舵机内部还包含了一套电子电路,用于接收控制信号并将其转化为电机驱动信号。
电子电路主要由控制芯片、驱动电路和位置反馈电路组成。
1. 控制芯片:舵机的控制芯片通常是一种专用的集成电路,能够接收来自外部的控制信号,并根据信号的脉冲宽度来确定输出轴的位置。
常见的控制芯片有NE555、ATmega328等。
2. 驱动电路:驱动电路负责将控制芯片输出的信号放大,并通过适当的电流控制电机的转动。
驱动电路通常包括功率放大器、电流限制器等元件。
3. 位置反馈电路:为了实现精确的位置控制,舵机通常还配备了位置反馈电路。
位置反馈电路能够实时监测输出轴的位置,并将实际位置反馈给控制芯片,从而实现闭环控制。
三、反馈控制系统舵机的反馈控制系统是舵机工作的关键部分,它通过不断比较控制信号与实际位置反馈信号的差异,调整驱动电路的输出,使输出轴的位置能够精确地达到控制信号所要求的位置。
反馈控制系统通常采用PID控制算法,即比例-积分-微分控制算法。
PID控制算法根据当前位置与目标位置之间的差异,计算出一个控制量,用于调整输出轴的位置。
比例项决定了控制量与差异的线性关系,积分项用于消除稳态误差,微分项用于抑制系统的超调和震荡。
四、工作过程舵机的工作过程如下:1. 接收信号:舵机通过信号线接收来自控制器的控制信号,通常是一种PWM 信号。
2. 解码信号:舵机内部的控制芯片将接收到的信号进行解码,提取出脉冲宽度信息。
3. 位置控制:控制芯片根据脉冲宽度信息计算出输出轴的目标位置,并与实际位置进行比较。
舵机的工作原理
舵机是一种常见的电动执行器,广泛应用于机械控制系统中。
它的主要作用是
根据输入的控制信号,控制输出轴的位置或角度,用于控制机械装置的运动。
舵机的工作原理可以简单地描述为:接收控制信号→信号解码→比较运算→驱
动电机→输出控制力矩→输出轴运动。
具体来说,舵机的工作原理包括以下几个关键步骤:
1. 接收控制信号:舵机通过接收来自控制系统的控制信号来确定输出轴的位置
或角度。
控制信号通常是一个脉冲宽度调制(PWM)信号,其脉冲宽度与期望位
置或角度成正比。
2. 信号解码:舵机接收到控制信号后,将其解码为一个数字量,用于后续的比
较运算。
3. 比较运算:舵机将解码后的控制信号与内部的位置或角度反馈信号进行比较。
如果两者不一致,舵机将根据差异调整输出控制力矩的大小。
4. 驱动电机:舵机内部包含一个电机,用于产生输出控制力矩。
根据比较运算
的结果,舵机会调整电机的转速或转向,以实现输出轴的位置或角度调整。
5. 输出控制力矩:舵机通过电机转动产生一个控制力矩,该力矩作用于输出轴上,驱动机械装置的运动。
力矩的大小取决于电机的转速和转矩。
6. 输出轴运动:根据输出控制力矩的作用,舵机将输出轴驱动到期望的位置或
角度。
输出轴通常通过齿轮传动或直接连接到舵机的输出轴。
舵机的工作原理基于控制信号与内部反馈信号之间的比较,通过调整输出控制
力矩来实现输出轴的位置或角度调整。
这种工作原理使得舵机在机械控制系统中具有精确的位置或角度控制能力,被广泛应用于机器人、航模、汽车等领域。
舵机的工作原理舵机是一种常用的电机驱动装置,广泛应用于机器人、无人机、航模、机械臂等领域。
它的主要作用是控制机械装置的角度或位置,实现精确的运动控制。
在本文中,我们将详细介绍舵机的工作原理。
一、舵机的基本结构舵机主要由电机、减速机、控制电路和反馈装置组成。
1. 电机:舵机通常采用直流电机或无刷电机作为驱动源。
电机的转动产生动力,驱动舵机的输出轴运动。
2. 减速机:舵机的减速机主要由齿轮组成,通过减速比将电机的高速转动转换为输出轴的低速高扭矩转动。
3. 控制电路:舵机的控制电路是舵机的核心部分,它接收外部的控制信号,并根据信号的脉宽来控制舵机的角度或位置。
4. 反馈装置:舵机通常内置有位置反馈装置,如光电编码器或霍尔传感器,用于实时监测输出轴的位置,并将信息反馈给控制电路,以实现闭环控制。
二、舵机的工作原理舵机的工作原理可以简单概括为:接收控制信号→解码信号→驱动电机→输出轴运动→反馈装置监测位置→控制电路调整驱动信号。
1. 接收控制信号:舵机通过接收外部的控制信号来确定输出轴的位置。
控制信号通常采用脉冲宽度调制(PWM)信号,脉宽的变化对应着不同的角度或位置。
2. 解码信号:控制电路接收到控制信号后,会对信号进行解码,提取出脉宽信息。
3. 驱动电机:解码后的信号被送入舵机的驱动电路,驱动电路根据信号的脉宽信息来控制电机的转动。
通常情况下,舵机的驱动电路采用H桥电路来实现正反转和速度控制。
4. 输出轴运动:驱动电机的转动通过减速机传递给输出轴,使得输出轴按照设定的角度或位置运动。
5. 反馈装置监测位置:舵机内置的反馈装置会实时监测输出轴的位置,并将位置信息反馈给控制电路。
6. 控制电路调整驱动信号:控制电路根据反馈装置提供的位置信息,与输入信号进行比较,如果输出轴的位置与设定位置不一致,控制电路会调整驱动信号,使输出轴逐渐接近设定位置,实现闭环控制。
三、舵机的特点和应用舵机具有以下几个特点:1. 高精度:舵机能够实现较高的角度或位置控制精度,通常可以达到数度甚至更小的角度。
舵机速度控制原理舵机是一种常见的电机,主要用于控制机器人、模型船、飞机等设备的运动。
舵机速度控制是控制舵机转动速度的一种技术,可以实现精确的运动控制。
本文将详细介绍舵机速度控制原理。
一、舵机基础知识1. 舵机结构舵机由电机、减速器、位置反馈装置、控制电路和输出轴组成。
其中,电机通过减速器将高速旋转转换为低速高扭矩输出,位置反馈装置可以测量输出轴位置,并将其反馈给控制电路,从而实现精确的位置控制。
2. 舵机工作原理当输入PWM信号时,舵机会根据信号占空比来确定输出轴的位置。
PWM信号周期一般为20ms,占空比范围为0-100%。
当占空比为0%时,输出轴处于最左侧;当占空比为50%时,输出轴处于中心位置;当占空比为100%时,输出轴处于最右侧。
二、舵机速度控制原理1. PWM信号频率与周期PWM信号频率指每秒钟PWM信号重复出现的次数。
PWM信号周期指PWM信号一次完整的周期所需要的时间。
一般来说,PWM信号频率越高,控制精度越高,但同时也会增加计算负担和电路复杂度。
PWM信号周期越短,输出轴转动速度就越快。
2. 舵机速度控制方法舵机速度控制可以通过改变PWM信号占空比来实现。
当占空比较小时,输出轴转动速度较慢;当占空比较大时,输出轴转动速度较快。
因此,可以通过改变PWM信号占空比的大小来控制舵机的转动速度。
3. 舵机加减速控制方法为了实现更加精确的运动控制,可以采用舵机加减速控制方法。
该方法主要分为两个阶段:加速阶段和匀速阶段。
在加速阶段中,PWM信号占空比逐渐增大,输出轴转动速度逐渐增快;在匀速阶段中,PWM信号占空比保持不变,输出轴转动速度保持恒定。
当需要停止时,则采用减速阶段,在该阶段中PWM信号占空比逐渐减小,输出轴转动速度逐渐减慢,直到停止。
三、舵机速度控制电路设计1. 舵机速度控制电路原理图舵机速度控制电路主要由PWM信号发生器、加减速电路、H桥驱动电路和舵机组成。
其中,PWM信号发生器用于产生PWM信号;加减速电路用于实现舵机加减速控制;H桥驱动电路用于控制输出轴的转向;舵机则是被控制的对象。
舵机的工作原理舵机是一种常见的控制器件,广泛应用于机器人、遥控模型、自动控制系统等领域。
它通过接收控制信号来控制输出轴的位置,从而实现对机械装置的精确控制。
本文将详细介绍舵机的工作原理。
一、舵机的组成结构舵机主要由机电、减速器、位置反馈装置和控制电路组成。
1. 机电:舵机通常采用直流无刷机电,具有高效率、高扭矩和快速响应的特点。
2. 减速器:舵机内部的减速器用于降低机电转速并提高输出轴的扭矩。
常见的减速器类型有行星齿轮、蜗杆齿轮等。
3. 位置反馈装置:舵机内部配备了位置反馈装置,用于检测输出轴的位置。
常见的位置反馈装置有光电编码器、霍尔效应传感器等。
4. 控制电路:舵机的控制电路主要由微控制器和驱动电路组成。
微控制器负责接收控制信号并生成相应的PWM信号,驱动电路则将PWM信号转换为适合驱动机电的电流。
二、舵机的工作原理舵机的工作原理基于PWM(脉宽调制)信号的控制。
1. PWM信号:PWM信号是一种周期性的方波信号,其周期固定,而占空比可以调节。
占空比是指高电平信号在一个周期内的占比。
舵机通常使用50Hz的PWM信号,周期为20ms。
2. 控制信号:舵机的控制信号通过脉宽来表示。
通常情况下,脉宽范围为1ms到2ms,其中1ms表示最小角度,2ms表示最大角度。
舵机的中立位置通常为1.5ms。
3. 工作原理:当控制信号为最小脉宽时,舵机输出轴会转到最小角度位置;当控制信号为最大脉宽时,舵机输出轴会转到最大角度位置;当控制信号为中立脉宽时,舵机输出轴会停在中立位置。
4. 反馈控制:舵机的位置反馈装置会不断检测输出轴的位置,并将检测到的位置信号反馈给控制电路。
控制电路根据反馈信号来调整PWM信号的占空比,从而使输出轴保持在目标位置。
5. 可调范围:舵机的可调范围由减速器和位置反馈装置决定。
减速器的设计决定了输出轴的角度范围,位置反馈装置的精度决定了输出轴的精确度。
三、舵机的应用领域舵机由于其精确控制和快速响应的特点,广泛应用于各种领域。
舵机的工作原理舵机是一种常见的控制装置,广泛应用于机器人、无人机、模型飞机等领域。
它能够根据输入的控制信号,精确地控制输出轴的位置或角度。
本文将详细介绍舵机的工作原理,包括舵机的构造、工作方式、控制原理以及常见的舵机类型。
一、舵机的构造舵机主要由电机、减速机构、位置反馈装置和控制电路组成。
1. 电机:舵机通常采用直流无刷电机(BLDC)或直流有刷电机(DC)作为驱动力源。
这些电机具有高转速、高扭矩和高效率的特点,能够提供足够的动力来驱动输出轴的运动。
2. 减速机构:舵机的输出轴通常需要具备较大的扭矩和较低的转速,因此减速机构被用来减小电机输出的转速,并增加输出轴的扭矩。
减速机构通常由齿轮、传动杆和轴承等构件组成。
3. 位置反馈装置:为了实现精确的位置控制,舵机通常配备了位置反馈装置。
位置反馈装置可以是光电编码器、霍尔传感器或磁编码器等,用于监测输出轴的位置并反馈给控制电路。
4. 控制电路:舵机的控制电路负责接收输入的控制信号,并根据信号的大小和方向来控制电机的转动。
控制电路通常由微控制器或专用的控制芯片组成,能够实现精确的位置控制和速度控制。
二、舵机的工作方式舵机的工作方式可以分为开环控制和闭环控制两种。
1. 开环控制:开环控制是指舵机根据输入的控制信号直接控制电机的转动。
在开环控制中,舵机不会对输出轴的位置进行反馈,因此无法实现精确的位置控制。
开环控制适用于一些简单的应用场景,如模型飞机的舵机控制。
2. 闭环控制:闭环控制是指舵机通过位置反馈装置对输出轴的位置进行监测,并根据反馈信号来调整电机的转动。
闭环控制能够实现精确的位置控制,适用于需要高精度控制的应用场景,如机器人的关节控制。
三、舵机的控制原理舵机的控制原理主要包括脉宽调制(PWM)信号和位置反馈控制。
1. 脉宽调制信号:舵机接收的控制信号通常是一种脉宽调制信号,即脉冲的宽度来表示控制信号的大小和方向。
通常情况下,舵机接收一个周期为20毫秒的脉冲信号,脉冲宽度的范围一般在1毫秒到2毫秒之间。
船舶舵机工作原理与控制方法
船舶舵机是一种用于控制船舶舵面的机械装置,其工作原理和控制方法与其它机械装置有所不同。
船舶舵机通常由两个主要部分组成:驱动系统和控制系统。
驱动系统是由一组齿轮组成的,这些齿轮通过油缸驱动舵面旋转。
控制系统则是通过按钮、操纵杆和仪表等控制驱动系统的油缸运动,从而实现舵面的位置和角度控制。
船舶舵机的工作原理可以概括为以下几个步骤:
1. 船舶靠岸时,舵机启动,将舵面的旋转方向设置为负角度,使得船体向岸边倾斜。
2. 当船体倾斜到一定角度时,舵机会将舵面的旋转方向设置为正角度,使得船体向岸边修正方向航行。
3. 如果需要船舶进一步向某个方向航行,舵机会根据需要调整舵面的角度,控制船向该方向航行。
4. 如果船舶需要停止,舵机会将舵面的旋转方向设置为负角度,使得船体向停止方向倾斜,从而实现停泊。
船舶舵机的控制方法通常采用操纵杆、按钮和仪表等控制元件,通过接收这些数据,船舶舵机来实现对舵面的位置和角度的控制。
在船舶航行中,驾驶员可以通过操纵舵面来调整船舶的方向和航速,而船舶舵机则根据驾驶员的控制指令,调整舵面的位置和角度,从而实现船舶的运动控制。
舵机的工作原理引言概述:舵机是一种常用的电动执行器,广泛应用于机器人、航模、车模等领域。
它通过接收控制信号,能够精确控制输出轴的角度位置,从而实现对机械装置的精确控制。
本文将详细介绍舵机的工作原理。
正文内容:1. 舵机的基本组成1.1 电机部分:舵机采用直流电机作为驱动力源,通常为核心电机或无刷电机。
1.2 减速器:舵机的输出轴通常需要具备较大的输出力矩,因此采用减速器来降低电机的转速并增加输出力矩。
1.3 位置反馈装置:为了实现准确的位置控制,舵机内部配备了位置反馈装置,通常是一种旋转式的电位器或编码器。
2. 舵机的工作原理2.1 控制信号解码:舵机接收到控制信号后,首先需要将信号进行解码,通常采用脉宽调制(PWM)信号。
2.2 位置反馈:舵机通过位置反馈装置获取当前输出轴的角度位置,并与控制信号进行比较,以确定需要调整的角度。
2.3 控制电路:舵机内部的控制电路根据控制信号和位置反馈的差异,通过控制电流的大小和方向,驱动电机旋转到目标位置。
2.4 闭环控制:舵机通过不断地进行位置反馈和调整,实现闭环控制,使输出轴能够精确地停留在目标位置。
3. 舵机的工作特点3.1 高精度:舵机通过位置反馈和闭环控制,能够实现高精度的角度控制,通常误差在几度以内。
3.2 高输出力矩:舵机通过减速器的作用,能够提供较大的输出力矩,适用于需要承受一定负载的应用场景。
3.3 快速响应:舵机的控制电路响应速度较快,能够在短时间内调整到目标位置。
4. 舵机的应用领域4.1 机器人:舵机广泛应用于机器人的关节驱动,能够实现机器人的灵活运动和精确控制。
4.2 航模:舵机用于控制航模的翼面、尾翼等部件,实现飞行姿态的调整。
4.3 车模:舵机用于控制车模的转向和油门,实现车辆的前进、后退和转向。
总结:舵机作为一种常见的电动执行器,通过接收控制信号和位置反馈,实现对输出轴角度位置的精确控制。
它具备高精度、高输出力矩和快速响应的特点,在机器人、航模、车模等领域有着广泛的应用。
舵机PWM控制原理
PWM(Pulse Width Modulation)控制是一种通过控制脉冲宽度来控制输出信号的技术。
对于舵机而言,PWM控制可以通过控制舵机的电流来控制舵机的位置和速度。
舵机的PWM控制原理如下:
1. 舵机接收PWM信号,其中高电平表示舵机需要保持静止,低电平表示舵机需要转动。
2. 舵机根据接收到的PWM信号,通过内部电路将低电平信号转换为舵机转动的电流,而高电平信号则被忽略。
3. 舵机根据接收到的PWM信号的周期和占空比来计算舵机的转动角度和速度。
4. 舵机通过内部的位置反馈系统来检测舵机的位置和速度,并根据反馈信号来调整舵机的转动角度和速度。
舵机的PWM控制可以通过调整PWM信号的占空比来控制舵机的转动角度和速度。
占空比越大,舵机转动的角度和速度就越大;占空比越小,舵机转动的角度和速度就越小。
通过调整PWM信号的占空比,可以实现对舵机的精确控制。
舵机的工作原理舵机是一种常用于控制机械运动的装置,广泛应用于无人机、机器人、模型飞机、汽车等领域。
它通过接收控制信号来改变输出轴的位置,从而控制被连接的装置的运动。
本文将详细介绍舵机的工作原理及其组成部分。
一、舵机的组成部分1. 电机:舵机的核心部件是电机,通常使用直流电机。
电机通过旋转输出轴来实现舵机的运动。
2. 位置反馈装置:舵机内部配备了位置反馈装置,用于检测输出轴的位置。
常见的位置反馈装置包括电位器和光电编码器。
3. 驱动电路:舵机的驱动电路负责接收控制信号,并控制电机的转动。
驱动电路通常由集成电路组成,其中包括放大器、比较器和脉宽调制(PWM)控制器等。
4. 齿轮传动系统:舵机通过齿轮传动系统将电机的旋转运动转化为输出轴的线性运动。
齿轮传动系统通常由一组齿轮和传动杆组成。
二、舵机的工作原理可以简单描述为:接收控制信号→ 位置反馈装置检测输出轴位置→ 驱动电路控制电机转动→ 齿轮传动系统转化电机运动为输出轴线性运动。
具体来说,当舵机接收到控制信号后,驱动电路会根据信号的特征来控制电机的转动。
控制信号通常采用脉宽调制(PWM)信号,脉宽的长度决定了输出轴的位置。
例如,一个周期为20毫秒的PWM信号,脉宽为1.5毫秒时,输出轴将停止在中间位置;脉宽为1毫秒时,输出轴将转到最左边;脉宽为2毫秒时,输出轴将转到最右边。
当驱动电路控制电机转动时,位置反馈装置会实时检测输出轴的位置,并将反馈信号发送给驱动电路。
驱动电路根据反馈信号与控制信号的差异来调整电机的转动,以使输出轴达到预定的位置。
齿轮传动系统起到了将电机的旋转运动转化为输出轴的线性运动的作用。
齿轮传动系统通过齿轮的嵌合和传动杆的连接,将电机的转动转化为输出轴的线性运动,从而实现舵机的控制。
三、舵机的应用舵机由于其精准的控制能力和可靠的工作性能,在许多领域得到了广泛应用。
1. 无人机:舵机用于控制无人机的姿态,包括俯仰、滚转和偏航等动作。
通过控制舵机的转动,可以实现无人机的稳定飞行和精确操控。