PD控制方式的1A开关电源Multisim
- 格式:docx
- 大小:297.58 KB
- 文档页数:14
[摘要]稳压电源是实现电源转换和电力输送的重要设备。
当今时代,农业,能源,交通,通信和电力行业等领域发展迅速,同时也对电源提出了更高的要求,如节能,轻便,节材,环保,安全,可靠等方面。
这就使得电源工作者不断追求探索相关的技术,做出更好的电源产品,以满足各行各业的需求。
开关电源是一种新型电源设备,相比传统的线性电源,它的科技含量高,低能耗,使用方便,并取得了良好的经济效益。
本文介绍了开关电源的工作原理、各种工作方式,它的长处和短处,设计方法以及开关电源未来设计方向,并在此基础上,对开关电源进行设计。
设计分成三个模块,即辅助电源模块, PWM控制模块和升压电路部分,其中PWM控制模块为本电路的核心。
确定电路设计方案后,使用Multisim 10对电路进行仿真,并对电路参数进行优化配比,力图使电路脉动小,输出电压是稳定、范围可调,从而达到设计的要求。
[关键词] 开关电源,脉宽调制,稳压,Multisim 10[Abstract]:Regulated power supply is the important equipment to achieve the power conversion and electricity transmission. In modern times,agriculture, energy, transportation, communications and power industry are all in fast development. Power supply must undertake the more responsibility such as energy, materials, weight reduction, environmental protection, safety and reliability. This has been making the power workers continuously explore related technologies, to make the better products in order to satisfy the demands of all walks of life. Switching power supply is a new type of power equipment, compared with the traditional linear power supply, it has a higher technological content, low energy consumption, easy to use, and has achieved good economic benefits.This paper describes the various working principle and all kinds of way to work of switch power supply, its advantages,disadvantages,design method and its design direction in the future. Then we begin to design the switching power supply based on the above. Design is divided into three modules, namely the auxiliary power supply module, PWM control module and a booster circuit, Among them,PWM control module as the core of the circuit. After determine the circuit design, using the Multisim 10 to simulate the circuit, and optimized and matched the circuit parameters as far as possible to make circuit pulse small, make the output voltage stable, adjustable range, to achieve the design requirements.[Key words]:switch power supply, pulse width modulation, voltage regulator, Multisim 10.目录1 绪论 (1)1.1开关电源的发展背景 (1)1.2 开关电源的基本原理与组成特点 (1)1.2.1 开关稳压电源的基本工作原理 (1)1.2.2开关电源的特点 (2)1.2.3开关电源的基本原理 (3)1.3 开关电源的分类 (3)1.4 开关稳压电源的发展 (6)1.4.1国际发展史状况 (6)1.4.2国内发展情况 (7)1.5 稳压开关电源的发展趋势 (7)1.6 开关电源的技术指标与基本设计要求 (9)2 开关变换电路 (11)2.1 滤波电路 (11)2.2 反馈电路 (11)2.2.1 电流反馈电路 (11)2.2.2 电压反馈电路 (12)2.3 电压保护电路 (12)3 UC3842电流型控制器 (14)3.1 UC3842简介 (14)3.1.1 UC3842的特点 (14)3.1.2 UC3842的引脚及其功能 (14)3.1.3 UC3842的内部结构 (15)3.2 UC3842的典型应用电路 (16)3.2.1 UC3842控制的同步整流电路 (16)3.2.2反激式开关电源 (18)3.2.3 升压型开关电源 (18)4 利用UC3842设计开关稳压电源 (20)4.1 电源设计基本指标 (20)4.2 具体电路设计 (20)4.2.1 启动电路 (20)4.2.2 PWM脉冲控制驱动电路 (22)4.2.3 电路输出部分的设计 (24)4.3 电路整体分析 (28)5 开关稳压电源的测试及仿真 (29)5.1 仿真软件Multisim 10概述 (29)5.2 仿真结果 (30)5.3 设计问题及解决方法 (32)总结 (33)致谢 (34)参考资料 (35)1绪论1.1开关电源的发展背景在20世纪80年代以前,作为线性电源的跟新换代产品,开关电源也主要用于小功率场合。

基于PD控制方式的9A开关电源Multisim仿真研究学院:电气与光电工程学院专业:电气工程及其自动化班级:13电气卓越姓名:**学号: ********绪论Buck变换器最常用的变换器,工程上常用的拓扑如正激、半桥、全桥、推挽等也属于Buck族,其优点有输出电流纹波小,结构简单,变比可调,实现降压的功能等。
然而其输出电压纹波较大,buck电路系统的抗干扰能力也不强。
为了使其具抗干扰能力,输出电流达到所需的等级,减小其电压纹波,现设计校正网络使其闭环,提高系统的能力。
常用的控制器有比例积分(PI)、比例微分(PD)、比例-积分-微分(PID)等三种类型。
本文将通过用multisim实例来研究PD控制器的调节作用。
一.设计要求及设计背景1.设计要求依据技术指标设计主功率电路,采用参数扫描法,对所设计的主功率电路进行仿真;掌握小信号建模的方法,建立Buck变换器原始回路增益函数;采用Matlab绘制控制对象的Bode图;根据控制对象的Bode图,分析所需设计的补偿网络特性进行补偿网络设计。
采用所选择的仿真软件进行系统仿真,要求有突加、突卸80%负载和满载时的负载特性,分析系统的静态稳压精度和动态响应速度。
2.设计背景Buck变换器最常用的变换器,工程上常用的拓扑如正激、半桥、全桥、推挽等也属于Buck族,其优点有输出电流纹波小,结构简单,变比可调,实现降压的功能等。
然而其输出电压纹波较大,buck电路系统的抗干扰能力也不强。
为了使其具抗干扰能力,输出电流达到所需的等级,减小其电压纹波,现设计校正网络使其闭环,提高系统的能力。
二.Buck变换器主电路设计1.1技术指标:输入直流电压(V IN):12V;输出电压(V O):5V;输出电流(I N):9A;输出电压纹波(V rr):50mV;基准电压(V ref):1.5V;开关频率(f s):100kHz;1.2主电路及参数计算 1.2.1主电路图1 buck 主电路1.2.2滤波电容计算输出纹波电压只与电容容量及ESR 有关:0.2rr rr C l NV VR i I ==∆(1) 电解电容生产厂商很少给出ESR ,而且ESR 随着电容的容量和耐压变化很大,但C 与R C 的乘积趋于常数,约为50~80μ·ΩF 。
KC017-1 2006 届毕业设计开题报告
题目基于multisim开关电源的仿真设计
专业电气工程及其自动化
姓名周大伟
班级0 2 电三
指导教师许泽刚
起止日期06.3.19-06.3.2
2006年03 月31日
(2)熟悉Multisim仿真软件;
(3)进行方案比较,确定简便、可行的方案。
(4)绘制BUCK主电路和控制电路,并完成闭环参数的设计;(5)采用参数扫描法设计滤波电感;
(6)采用Multisim仿真软件进行仿真设计;
(7)撰写毕业论文,准备答辩;
4.设计方案及其技术路线
4.1BUCK变换器设计
此设计分为BUCK主电路和闭环控制电路两部分的设计,且采用Multisim仿真软件进行仿真设计。
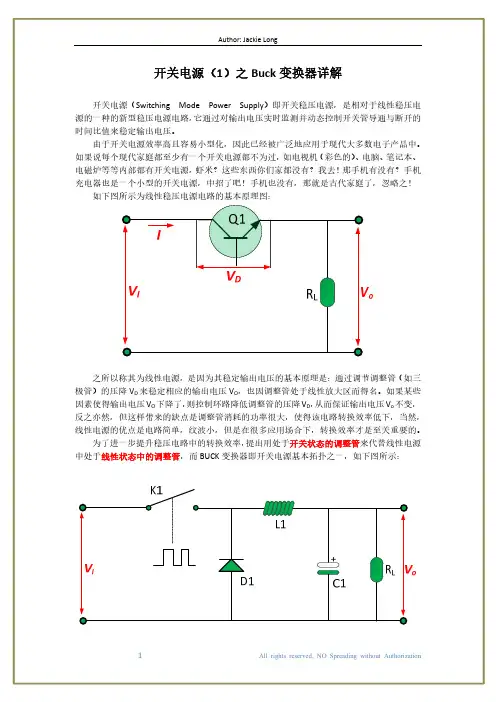
本开关电源设计采用Buck(降压)电路,Buck 变换器是最基本的PWM变换器主电路拓扑之一。
图1是BUCK 变换器电路。
图1 降压(Buck)变换器电路
主要的设计步骤为:主电路选型(Buck电路),“黑箱”计算,输出滤波电路设计(滤波电感设计和滤波电容的确定),开关器件及二极管的设计,控制电路的设计等等。
具体设计路线如下:
1.技术指标
输入电压:DC +10V
注:开题报告作为毕业设计答辩委员会对学生答辩资格审查的依据材料之一,此报告应在导师的指导下,由学生填写,经导师签署意见及系部审核后生效。
KC017-1
2006 届毕业设计开题报告
题目基于multisim开关电源的仿真设计
专业电气工程及其自动化
姓名周大伟
班级0 2 电三
指导教师许泽刚
起止日期06.3.19-06.3.2
2006年03 月31日
也就可以尽快解决。
减少投资,加快开发速度,大大减少了设计所需的时间。
3.2工作内容
(1)了解Buck变换器的设计方法;
(2)熟悉Multisim仿真软件;
(3)进行方案比较,确定简便、可行的方案。
(4)绘制BUCK主电路和控制电路,并完成闭环参数的设计;
(5)采用参数扫描法设计滤波电感;
(6)采用Multisim仿真软件进行仿真设计;
(7)撰写毕业论文,准备答辩;
4.设计方案及其技术路线
4.1BUCK变换器设计
此设计分为BUCK主电路和闭环控制电路两部分的设计,且采用M ultisim仿真软件进行仿真设计。
本开关电源设计采用Buck(降压)电路,Buck 变换器是最基本的PWM变换器主电路拓扑之一。
图1是BU CK变换器电路。
图1降压(Buck)变换器电路
主要的设计步骤为:主电路选型(Buck电路),“黑箱”计算,输出滤
注:开题报告作为毕业设计答辩委员会对学生答辩资格审查的依据材料之一,此报告应在导师的指导下,由学生填写,经导师签署意见及系部审核后生效。
基于PID控制方式的A开关电源Multisim(完整资料)(可以直接使用,可编辑优秀版资料,欢迎下载)基于PID控制方式的9A开关电源Multisim仿真研究学院:电光学院专业:电气工程及其自动化班级:姓名:学号:目录1。
引言42.基于PID控制方式的Buck电路的综合设计42.1设计指标42。
2 Buck主电路的参数设计52。
3用Multisim软件参数扫描法计算63.PID补偿网络设计103.1主电路直流增益计算103。
2补偿网络的设计:控制方式为PID。
113.3变换器传递函数及波特图144。
Buck变换器的负载突加突卸仿真154.1总电路图的设计如图154。
2突加突卸80%负载175。
小结19参考文献191。
引言开关调节系统常见的控制对象,包括单极点型控制对象、双重点型控制对象等。
为了使某个控制对象的输出电压保持恒定,需要引入一个负反馈。
粗略的讲,只要使用一个高增益的反相放大器,就可以达到使控制对象输出电压稳定的目的。
但就一个实际系统而言,对于负载的突变、输入电压的突升或突降、高频干扰等不同情况,需要系统能够稳、准、快地做出合适的调节,这样就使问题变得复杂了。
例如,已知主电路的时间常数较大、响应速度相对缓慢,如果控制的响应速度也缓慢,使得整个系统对外界变量的响应变得很迟缓;相反如果加快控制器的响应速度,则又会使系统出现振荡。
所以,开关调节系统设计要同时解决稳、准、快、抑制干扰等方面互相矛盾的稳态和动态要求,这就需要一定的技巧,设计出合理的控制器,用控制器来改造控制对象的特性。
常用的控制器有比例积分(PI)、比例微分(PD)、比例-积分-微分(PID)等三种类型。
PD 控制器可以提供超前的相位,对于提高系统的相位裕量、减少调节时间等十分有利,但不利于改善系统的控制精度;PI控制器能够保证系统的控制精度,但会引起相位滞后,是以牺牲系统的快速性为代价提高系统的稳定性;PID控制器兼有二者的优点,可以全面提高系统的控制性能,但实现与调试要复杂一些。
基于PID控制方式的9A开关电源Multisim仿真研究学院:电光学院专业:电气工程及其自动化班级::学号:目录1.引言 (3)2.基于PID控制方式的Buck电路的综合设计 (3)2.1设计指标 (3)2.2 Buck主电路的参数设计 (4)2.3用Multisim软件参数扫描法计算 (5)3.PID补偿网络设计 (8)3.1主电路直流增益计算 (8)3.2补偿网络的设计:控制方式为PID (9)3.3变换器传递函数及波特图 (11)4. Buck变换器的负载突加突卸仿真 (12)4.1总电路图的设计如图 (12)4.2突加突卸80%负载 (14)5. 小结 (15)参考文献 (15)1.引言开关调节系统常见的控制对象,包括单极点型控制对象、双重点型控制对象等。
为了使某个控制对象的输出电压保持恒定,需要引入一个负反馈。
粗略的讲,只要使用一个高增益的反相放大器,就可以达到使控制对象输出电压稳定的目的。
但就一个实际系统而言,对于负载的突变、输入电压的突升或突降、高频干扰等不同情况,需要系统能够稳、准、快地做出合适的调节,这样就使问题变得复杂了。
例如,已知主电路的时间常数较大、响应速度相对缓慢,如果控制的响应速度也缓慢,使得整个系统对外界变量的响应变得很迟缓;相反如果加快控制器的响应速度,则又会使系统出现振荡。
所以,开关调节系统设计要同时解决稳、准、快、抑制干扰等方面互相矛盾的稳态和动态要求,这就需要一定的技巧,设计出合理的控制器,用控制器来改造控制对象的特性。
常用的控制器有比例积分(PI)、比例微分(PD)、比例-积分-微分(PID)等三种类型。
PD控制器可以提供超前的相位,对于提高系统的相位裕量、减少调节时间等十分有利,但不利于改善系统的控制精度;PI控制器能够保证系统的控制精度,但会引起相位滞后,是以牺牲系统的快速性为代价提高系统的稳定性;PID控制器兼有二者的优点,可以全面提高系统的控制性能,但实现与调试要复杂一些。
基于pi控制方式的a开关电源multisim仿
真研究大学论文(1)
本论文通过对基于PI控制方式的A开关电源的Multisim仿真研究,探讨了该控制方式在电源设计中的作用,并分析了电源设计中的问题及其解决方法。
一、介绍
A开关电源是一种高效、快速响应的DC-DC转换器,广泛应用于各种应用领域,尤其是电子设备中。
本论文的研究对象是基于PI控制方式的A开关电源,在这种控制方式下,开关管的开关频率可以调节,从而实现电源输出端电压的稳定。
二、PI控制方式
PI控制方式是一种常用的闭环调节控制方法,它由比例(P)和积分(I)两个部分组成。
PI控制器可以对电源输出电压进行精确控制,并且具有响应速度快、稳定性高等优点。
三、A开关电源的Multisim仿真
Multisim是一款常用的电路仿真软件,可以帮助电源设计师设计和验证电路的功能及性能。
本论文使用Multisim对基于PI控制方式的A 开关电源进行了仿真,通过调节开关频率和PI控制器的参数等,调整电源输出端的电压,达到稳定的状态。
四、电源设计中的问题及其解决方法
在电源设计中,会遇到一些问题,如:开关频率不稳定、电源输出电压波动等。
为了解决这些问题,本论文提出了以下解决方法:
1.调整开关频率,使其在一定范围内稳定,从而保证电源输出端电压
的稳定性。
2.调整PI控制器的比例和积分参数,使其更加精准地控制电源输出端电压。
3.添加稳压管等器件,以保护电源免受短路等故障的影响。
五、结论
本文通过对基于PI控制方式的A开关电源的Multisim仿真研究,探讨了该控制方式在电源设计中的作用,并提出了解决方案,可以为电源设计工程师提供参考。
multisim中直流电源的名称在Multisim电路仿真软件中,直流电源被称为直流电压源或直流电流源。
这些直流电源设备是模拟现实世界中提供稳定的直流电源的组件,在电路仿真中扮演着重要的角色。
在本文中,我将详细讨论Multisim中直流电源的使用方法和常见问题。
1. Multisim中的直流电源类型Multisim提供了几种类型的直流电源,以满足不同电路仿真需求。
主要的两种类型是直流电压源(DC Voltage Source)和直流电流源(DC Current Source)。
直流电压源是一种提供恒定电压的电源,这个电压可以在仿真中设定。
用户可以指定电源的电压值、极性(正极和负极)以及内阻。
这个电源的输出电压不受电路负载的影响,始终保持不变。
直流电流源是一种提供恒定电流的电源,用户同样可以在仿真中设定电流的数值。
同样,用户可以指定电源的电流值以及极性。
直流电流源的输出电流同样不受电路负载的影响。
2. 添加直流电源到Multisim电路中要使用直流电源,在Multisim中添加一个直流电源到电路中是必须的。
以下是添加直流电压源或直流电流源的步骤:a. 在Multisim的工具栏上选择“Components(元器件)”,然后在弹出的窗口中选择“ANALOG(模拟电路)”。
b. 在“ANALOG”下拉菜单中选择“SOURCES(信号源)”,然后选择“DC Voltage Source(直流电压源)”或“DC Current Source(直流电流源)”。
c. 将所选的直流电源组件拖动到绘图区域中的期望位置,并连接到所需的电路元件。
3. 设置直流电源的参数在将直流电源添加到电路中后,我们需要设置它的参数。
对于直流电压源,我们需要指定电压的数值、极性以及内阻。
对于直流电流源,我们需要指定电流的数值和极性。
a. 右键单击直流电源组件,在弹出的菜单中选择“Edit Properties(编辑属性)”。
b. 在属性对话框中,可以设置电压或电流值,以及极性相关的选项。
CHANGZHOU INSTITUTE OF TECHNOLOGY基于PD控制方式的2A开关电源的Multisim仿真学院:电气与光电工程学院专业:电气工程及其自动化:班级:学号:目录一绪论 (4)二实验目的 (4)三实验要求 (4)四主电路功率的设计 (4)4.1buck 电路图 (5)4.2用Multisim软件参数扫描法计算 (5)五补偿网络设计 (7)5.1原始系统的设计 (7)5.2补偿网络的设计:控制方式为PD (8)六负载突加突卸 (13)6.1满载运行 (13)6.2突加突卸80%负载 (15)七心得体会 (16)附:参考文献 (17)一绪论随着电子技术的不断发展对电源的要求也不断的提高,开环的电源应该说早就不能满足要求,无论是在输出参数的精度还是抗干扰能力方面都比不上闭环控制系统。
为了使某个控制对象的输出电压保持恒定,需要引入一个负反馈。
粗略的讲,只要使用一个高增益的反相放大器,就可以达到使控制对象输出电压稳定的目的。
但就一个实际系统而言,对于负载的突变、输入电压的突升或突降、高频干扰等不同情况,需要系统能够稳、准、快地做出合适的调节,这样就使问题变得复杂了。
要同时解决稳、准、快、抑制干扰等方面互相矛盾的稳态和动态要求,这就需要一定的技巧,设计出合理的控制器,用控制器来改造控制对象的特性。
常用的控制器有比例积分(PI)、比例微分(PD)、比例-积分-微分(PID)等三种类型。
本文将通过Multisim用实例来研究PD控制器的调节作用。
二实验目的(1)了解Buck变换器基本结构及工作原理;(2) 掌握电路器件选择和参数的计算;(3) 学会使用Multisim仿真软件对所设计的开环降压电路进行仿真;(4) 学会使用Multisim仿真软件对控制环节的仿真技术;(5)学会分析系统的静态稳压精度和动态响应速度.三实验要求V):10V;输入直流电压(INV):5V;输出电压(OI):2A;输出电流(NV):50mV;输出电压纹波(rrV):1.5V;基准电压(reff):100kHz;开关频率(S四主电路功率的设计4.1buck 电路图 buck 电路4-1-1:buck 电路 图4-1-1Ω1252.0m I V i V R NrrLrrC ==∆=C R c •的乘积趋于常数50~80µF,我使用62.5µΩ*F ,由式(1)可得C R =125m Ω,C=500µF开关管闭合与导通状态的基尔霍夫电压方程分别如下式所示:ONLON L O IN T i LV V V V ∆=---OFFLD L O T i LV V V ∆=++sON OFF f T T 1=+ 设二极管的通态压降D V =0.5V ,电感中的电阻压降L V =0.1V ,开关管导通压降ON V =0.5V 。
基于PID控制方式的4A开关电源Multisim仿真研究学院: xxxxx专业:xxxxxxxxxx班级:xxxxxx姓名:xxx学号:xxxxxx时间:xxxxxx引言开关电源是利用现代电力电子技术,控制开关管开通和关断的时间比率,维持稳定输出电压的一种电源,开关电源一般由脉冲宽度调制(PWM )控制IC 和MOSFET 构成。
随着电力电子技术的发展和创新,使得开关电源技术也在不断地创新,开关电源向高频化、小型化发展。
在开关电源中,变换器占据着重要地位。
Buck 变换器是最常用的变换器,工程上常用的拓扑如正激、半桥、全桥。
本文就是对Buck 变换器的主电路、控制方式以及补偿电路进行设计研究仿真,得出波特图和负载的电压电流仿真(控制方式为PID ,负载电流为4A ,仿真软件为Multisim )。
1.主电路设计1.1 主电路参数 输入直流电压V in =15V 输出直流电压V 0=5V 输出电流I N =4A 输出电压纹波V rr =50mV 基准电压V ref =1.5V 开关频率f s =100kHz 。
图1 Buck 主电路1.2主电路参数计算 ①滤波电容参数设计如下:输出纹波电压只与电容的容量以及ESR 有关,即Ω=⨯===∆.5m 624.2050.20V rr V rr Rc I i N L由于电解电容生产厂家很少给出ESR ,而且ESR 随着电容的容量和耐压变化很大,但是C 与RC的乘积趋于常数,约为50~80F *Ωμ,故F 100062.5m F.562Rc Rc C C μμ=ΩΩ•=•=②滤波电感参数设计如下:开关闭合和导通的基尔霍夫电压方程如下:图2等效电路onLon L 0in T i L V V V V ∆•=--- (1) OFFLD L 0T i L V V V ∆•=++ (2) ms 1001T T OFF on =+ (3) 假设二极管的通态压降0.5V V D =,电感中的电阻压降为.1V 0V L =,开关管的导通压降.5V 0V on =,根据等式(1)、(2)、(3)可得:H .843L μ=,s 3.73T on μ=,故取H 74L μ=。
基于PD控制方式的1A开关电源Multisim仿真研究学院:电气与光电工程学院专业:电气工程及其自动化班级:引言开关电源是一种采用开关方式控制的直流稳压电源。
它以小型、高效、轻量的特点被广泛应用于各种电子设备中。
开关电源控制部分绝大多数是按模拟信号来设计和工作的,其抗干扰能力不太好,信号有畸变。
开关调节系统设计要同时解决稳、准、快、抑制干扰等方面互相矛盾的稳态和动态要求。
1.Buck 变换器主电路设计1.1技术指标输入直流电压(V IN ):10V 输出电压(V O ):5V 输出电流(I N ):1A 输出纹波电压(V rr ):50mV 基准电压(V ref ):1.5V 开关频率(f s ):100KHZ图1 1.2主电路各参数计算 滤波电容参数计算输出纹波电压只与电容C 的大小以及用量有关 (1)Ω=⨯=⨯=∆=m I V i V R N rr L C 25012.0502.0rr 但C 与R C 的乘积趋于常数,约为50~80µΩ·F 。
本例中取为75µΩ·F 。
由式( 1) 可得:-375FC==300F25010μμΩ⋅⨯Ω1.3滤波电感参数计算根据基尔霍夫电压方程,可知开关管S 闭合与导通状态输入电压和输出电压满足如下关系:)(3T i L V V V OFFLD L O ∆=++ 假设二极管通态压降V D =0.5V ,电感L 中的电阻压降V L =0.1V ,开关管S 导通压降V ON =0.5V 。
ONT 2.0L 4.45.0-1.0-5-10⨯== ONT s -⨯==++μ102.0L 6.55.01.05由 fT T off on 1=+,解得T ON =5.6µs,L=123.2µH。
1.4采用参数扫描法,对所设计的主功率电路进行仿真 输出电压和电流以及输出纹波如下: 当L=113.2uH 时图2)(2T i V -V -V -V ONLONL O IN ∆=图3 当L=123.2uH时图4图5 当L=133.2时图6图7当L=123.2µH 时,电感电流在0.90~1.10之间脉动,符合Δi L ≤0.2I N =0.2。
基于PD控制方式的1A开关电源Multisim仿真研究学院:电气与光电工程学院专业:电气工程及其自动化班级:引言开关电源是一种采用开关方式控制的直流稳压电源。
它以小型、高效、轻量的特点被广泛应用于各种电子设备中。
开关电源控制部分绝大多数是按模拟信号来设计和工作的,其抗干扰能力不太好,信号有畸变。
开关调节系统设计要同时解决稳、准、快、抑制干扰等方面互相矛盾的稳态和动态要求。
1.Buck 变换器主电路设计1.1技术指标输入直流电压(V IN ):10V 输出电压(V O ):5V 输出电流(I N ):1A 输出纹波电压(V rr ):50mV 基准电压(V ref ):1.5V 开关频率(f s ):100KHZ图1 1.2主电路各参数计算 滤波电容参数计算输出纹波电压只与电容C 的大小以及用量有关 (1)Ω=⨯=⨯=∆=m I V i V R N rr L C 25012.0502.0rr 但C 与R C 的乘积趋于常数,约为50~80µΩ·F 。
本例中取为75µΩ·F 。
由式( 1) 可得:-375FC==300F25010μμΩ⋅⨯Ω1.3滤波电感参数计算根据基尔霍夫电压方程,可知开关管S 闭合与导通状态输入电压和输出电压满足如下关系:)(3T i L V V V OFFLD L O ∆=++ 假设二极管通态压降V D =0.5V ,电感L 中的电阻压降V L =0.1V ,开关管S 导通压降V ON =0.5V 。
ONT 2.0L 4.45.0-1.0-5-10⨯== ONT s -⨯==++μ102.0L 6.55.01.05由 fT T off on 1=+,解得T ON =5.6µs,L=123.2µH。
1.4采用参数扫描法,对所设计的主功率电路进行仿真 输出电压和电流以及输出纹波如下: 当L=113.2uH 时图2)(2T i V -V -V -V ONLONL O IN ∆=图3 当L=123.2uH时图4图5 当L=133.2时图6图7当L=123.2µH 时,电感电流在0.90~1.10之间脉动,符合Δi L ≤0.2I N =0.2。
2.控制方案及参数设计2.1原始回路有关计算1.采用小信号模型分析方法可得Buck 变换器原始回路增益函数()S G 0为:()()()LCs R L s sCR V s H V s G C IN m 20111+++••=假设PWM 锯齿波幅值m V =1.5V ,x R =3ΩK ,y R =1.3ΩK ,由此可得采用网络传递函数 ()3.0=s H ,原始回路直流增益4.200==G A 。
计算如下:()3.03.133.1≈+=+=y x y R R R s H ()()12263666-26-360103002.1231064.24110250103001210300102.1235102.123110250103001103.05.11-------⨯⨯⨯+⨯⨯+⨯⨯⨯⨯+•=⨯⨯⨯⨯+⨯⨯+⨯⨯⨯⨯+••=s s s s s s s G ()200=G极点频率Hz LCf p 85.82710300102.1232121660=⨯⨯⨯==--ππ根据原始系统的传递函数可以得到的波特图如图所示,MATLAB 的程序如下num=[2];den=[3.696e-8 24.64e-6 1];g=tf(num,den);margin(g);图82.2补偿网络设计 2.2.1 PD 补偿网络电路图图9PD 补偿网络传递函数为:-40-202040M a g n i t u d e (d B )101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf Hz) , P m = 6.36 deg (at 1.43e+003 Hz)Frequency (Hz)()pzC C ssG s G ωω++•=110 ,p c Z ωωω<<0210R R R G C +-= , 131C R p •=ω , ()1321//1C R R R z +=ωPD 补偿网络的传递函数可以得到的波特图如图8所示,MATLAB 的程序如下:num=[174.08e-5 56.52];den=[3.653e-6 1];g=tf(num,den);margin(g);图102.2.2 确定补偿网络的参数为了提高穿越频率,设加入补偿网络后开环传递函数的穿越频率c f =(101~51)s f ,设 KHZ KHZ f f s c 15100203203=⨯==,相位裕度控制在50º~55º。
设相位裕度οϕ52=m ,PD 补偿网络的零、极点频率计算公式为:KHz f f m m cz 165.552sin 152sin 115sin 1sin 1=+-⨯=+-=οοϕϕ3540455055M a g n i t u d e (d B )10101010103060P h a s e (d e g )Bode Diagram Gm = Inf , P m = InfFrequency (Hz)KHz f f m m cp 56.4352sin 152sin 115sin 1sin 1=-+⨯=-+=οοϕϕ所以s Krad f z z /45.32165.522=⨯==ππω , s Krad f p p /72.27356.4322=⨯==ππω PD 补偿网络直流增益为:52.5656.43165.52185.82715120200=⨯⨯=••⎪⎪⎭⎫⎝⎛=)(K f f Af f G p z p c C 则()S s s ss G C 653310653.311008.3152.561072.27311045.32152.56--⨯+⨯+⨯=⨯+⨯+⨯= 系统传递函数为:()()()()()()212665010369601064.24110653.311008.3152.562s s s ss G s G s G C ----⨯+⨯+⨯+⨯+⨯⨯==(电容内阻C R 忽略)根据系统的传递函数可以得到系统的波特图如图9所示,MATLAB 的程序如下:num=conv(113.04,[3.08e-5 1]);den=conv([3.696e-8 24.64e-6 1],[3.653e-6 1]); g=tf(num,den); margin(g);图11由图知:∈=Z 9.12KH f (10KHZ ,20KHZ ),∈=οϕ9.52(50º,55º)满足条件。
总系统伯德图如图10所示: num=[2];den=[0.0000000369 0.000024 1]; g0=tf(num,den); bode(g0); margin(g0); hold onnum=[144.4377e-5 57.09]; den=[2.53e-6,1]; g=tf(num,den); margin(g); hold on num=[2];den=[0.0000000369 0.000024 1]; f=tf(num,den);num1=[144.4377e-5 57.09]; den1=[2.53e-6,1];-100-5050100M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf Hz) , P m = 52.9 deg (at 1.29e+004 Hz)Frequency (Hz)g=tf(num1,den1);num2=conv(num,num1);den2=conv(den,den1);margin(num2,den2)图122.2.3补偿网络电路中参数的计算52.56021=+R R RK C R 72.273113=• ()K C R R R 45.32//11321=+ 设Ω==K R R 3021,由上式可得Ω=K R 06.10,nF C 81.11=,Ω=K R 02.23(取Ω=K R 10, nF C 8.11=,Ω=K R 23)A I N 2.0%20=Ω==252.05%20N IN I V Ω=⇒Ω==25.65//25n n R R R-150-100-50050100M a g n i t u d e (d B )1010101010-180-9090P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf Hz) , P m = 53.3 deg (at 1.35e+004 Hz)Frequency (Hz)3.总电路图的设计图13图14 图15输出纹波电压图15由图可见,加入补偿网络后,输出电压稳定在5V左右。
图17为突加突卸80%负载时的输出电流和输出电压波形图:图16图17图18突加突卸80%的仿真图4.结语通过本次开关电源设计,基本掌握了Buck电路的知识,以及学会了使用Psim仿真软件和Matlab。
通过自己的思考以及和同学的探讨,终于可以完成这项十分考验知识水平和个人能力的任务。
这让我充分认识到了自主学习的重要性,以及自己知识储备不足,我会在日后的学习生活中加强综合训练。
参考文献[1]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2002:258~263.[2]许泽刚,李俊生,郭建江.基于电力电子的虚拟综合实验设计与实践[J].电气电子教学学报.2008[3]张占松,张心益.开关电源技术教程:机械工业出版社2012.8。