第2节 水准仪和水准尺
- 格式:ppt
- 大小:5.52 MB
- 文档页数:31
3 14a——后视读数A ——后视点b ——前视读数 B ——前视点1、A、 B 两点间高差:2、测得两点间高差后,若已知 A 点高程,则可得B点的高程:。
3、视线高程:4、转点TP(turningpoint)的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。
二、连续水准测量ﻫ如图所示,在实际水准测量中, A、 B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。
此时有必要沿A、 B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。
根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A、B两点间的高差值,有: h1=a 1 - b 1h 2 = a2- b 2……则: hAB = h 1+h 2 +…… + h n = Σ h =Σ a -Σ b结论: A 、B 两点间的高差等于后视读数之和减去前视读数之和。
§2.3 水准仪和水准尺一、水准仪(level)如图所示,由望远镜、水准器和基座三部分组成。
DS3 微倾式水准仪自动安平水准仪1、望远镜(telescope)——由物镜、目镜和十字丝(上、中、下丝)三部分组成。
2、水准器(bubble) 有两种:圆水准器(circularbubble) ——精度低,用于粗略整平;水准管(bubbletube)——精度高,用于精平。
特性:气泡始终位于高处,气泡在哪处,说明哪处高。
3、基座(tribrach)二、水准尺(leveling staff)水准尺主要有:单面尺、双面尺和塔尺。
1、尺面分划为1cm,每10cm 处( E 字形刻划的尖端)注有阿拉伯数字。
2、双面尺的红面尺底刻划:一把为4687mm,另一把为4787mm。
三、尺垫(staff plate)放置在转点上,为防止观测过程中水准尺下沉。
四、水准仪的使用操作程序:粗平——瞄准——精平——读数(一)粗平——调节脚螺旋,使圆水准气泡居中。
§2-1 水准测量的原理一、几种常见的水准测量方法1.几何水准测量(简称水准测量);2.三角高程测量;3.气压高程测量(物理高程测量)。
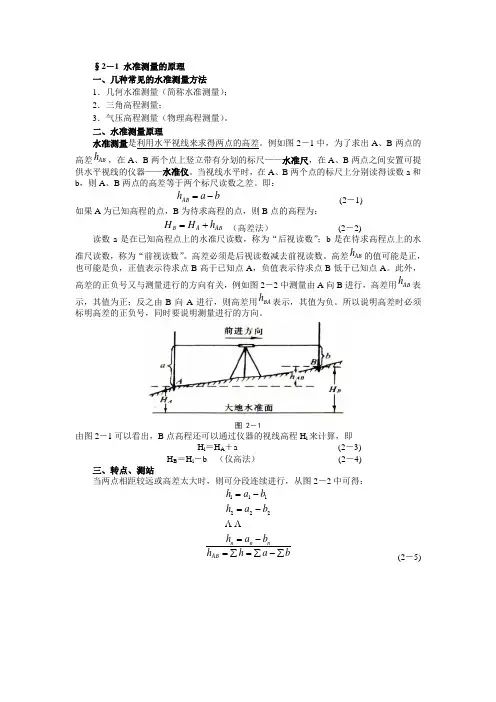
二、水准测量原理水准测量是利用水平视线来求得两点的高差。
例如图2-1中,为了求出A 、B 两点的高差AB h ,在A 、B 两个点上竖立带有分划的标尺——水准尺,在A 、B 两点之间安置可提供水平视线的仪器——水准仪。
当视线水平时,在A 、B 两个点的标尺上分别读得读数a 和b ,则A 、B 两点的高差等于两个标尺读数之差。
即:b a h AB -= (2-1)如果A 为已知高程的点,B 为待求高程的点,则B 点的高程为:AB A B h H H += (高差法) (2-2)读数a 是在已知高程点上的水准尺读数,称为“后视读数”;b 是在待求高程点上的水准尺读数,称为“前视读数”。
高差必须是后视读数减去前视读数。
高差AB h 的值可能是正,也可能是负,正值表示待求点B 高于已知点A ,负值表示待求点B 低于已知点A 。
此外,高差的正负号又与测量进行的方向有关,例如图2-2中测量由A 向B 进行,高差用AB h 表示,其值为正;反之由B 向A 进行,则高差用BA h 表示,其值为负。
所以说明高差时必须标明高差的正负号,同时要说明测量进行的方向。
图 2-1 由图2-1可以看出,B 点高程还可以通过仪器的视线高程H i 来计算,即H i =H A +a (2-3)H B =H i -b (仪高法) (2-4)三、转点、测站当两点相距较远或高差太大时,则可分段连续进行,从图2-2中可得:b a h h b a h b a h b a h ABnn n ∑-∑=∑=-=-=-=222111 (2-5)图 2-2从公式2-5就可以看出来:1.每一站的高差等于此站的后视读数减去前视读数;2.起点到闭点的高差等于各段高差的代数和,也等于后视读数之和减去前视读数之和。
通常要同时用h ∑和()b a ∑-∑进行计算,用来检核计算是否有误。
第2章 水准测量重点提示:介绍了高程测量的常用方法,重点讲述了水准测量的原理、方法,介绍了水准仪的构造,讲述了水准仪的使用、水准测量的实施过程、水准测量的测站校核、路线校核及数据处理、介绍了水准仪的检验和校正方法、简要分析了水准测量误差的来源。
地球表面是高低起伏很不规则的。
要确定地面点的空间位置,除了确定其平面位置外,还要确定其高程。
为了测定地面点高程而进行的测量工作叫做高程测量。
根据测量原理和使用仪器与施测方法的不同,高程测量的方法主要有水准测量、三角高程测量和物理高程测量三种。
水准测量是利用水准仪提供的水平视线,分别在地面两点垂直竖立的水准标尺上读取读数,推算出两点间的高差,进而求得待定点的高程的方法。
水准测量的精度较高,是精确测定地面点高程的主要方法,但工作量较大且受地形条件限制;三角高程测量是利用仪器在测站点上测定仪器中心至照准点的垂直角,量取测站点仪器高和照准点觇标高,若已知两点间的水平距离,根据三角学原理推算出两点间的高差,进而求得待定点的高程的方法。
三角高程测量的精度低于水准测量,仅作为高程测量的辅助方法,但其作业简单,布设灵活,是一种测定地面点高程的常用方法。
物理高程测量是根据地球的物理性质,利用仪器来确定地面点高程的方法。
物理高程测量主要有两种方法:一种是根据大气气压随地面点高程的不同而变化的规律(即高程愈大,大气压力愈小的原理),用气压计测定出待定点高程的方法。
称为气压测高法;另一种方法是根据重力加速度随地面点高程的不同而变化的规律(即高程愈大,重力加速度愈小的原理),利用重力仪测定两点间重力变化量来确定高差,进而推算出待定点高程的方法,称为重力测高法。
物理高程测量的精度最低,但仪器简单,施测方便,一般仅用于勘查工作,本教材不予介绍。
高程控制主要通过水准测量的方法建立,而在地形起伏大、直接利用水准测量方法较困难的地区建立低精度的高程控制网以及图根高程控制网时,可采用三角高程测量的方法建立。

