11-12章例题
- 格式:docx
- 大小:117.41 KB
- 文档页数:5
第十一章例题1.【例题·多选题】下列项目中,属于劳务报酬所得的有()。
A.个人书画展取得的报酬B.提供著作的版权而取得的报酬C.将国外的作品翻译出版取得的报酬D.高校教师受出版社委托进行审稿取得的报酬2.【例题·多选题】下列各项个人所得中,应当征收个人所得税的有()。
A.个人独资企业集资利息B.个人从股份公司取得股息C.个人取得企业债券利息D.个人取得国家发行的金融债券利息3.【例题·单选题】韩国居民崔先生受其供职的境外公司委派,来华从事设备安装调试工作,在华停留60天,期间取得境外公司支付的工资40000元,取得中国体育彩票中奖收入20000元。
4.【例题·多选题】下列各项中,适用5%~35%的五级超额累进税率征收个人所得税的有()。
A.个体工商户的生产经营所得B.合伙企业的生产经营所得C.个人独资企业的生产经营所得D.对企事业单位的承包经营、承租经营所得5.【例题·多选题】下列各项中,以取得的收入为应纳税所得额直接计征个人所得税的有()。
A.稿酬所得B.偶然所得C.股息所得D.特许权使用费所得6.【例题·多选题】下列个人所得在计算个人所得税应纳税所得额时,可减除定额费用的有()。
A.对企事业单位的承包、承租经营所得B.财产转让所得C.工资薪金所得D.利息所得7.【例题·计算题】中国公民王某6月与一家培训机构签订了半年的劳务合同,合同规定从6月起每周六为该培训中心授课1次,每次报酬为1200元。
6月份为培训中心授课4次。
要求:计算培训中心6月支付王某授课费应代扣代缴的个人所得税。
8.【例题·多选题】下列稿酬所得中,应合并为一次所得计征个人所得税的有()。
A.同一作品在报刊上连载,分次取得的稿酬B.同一作品再版取得的稿酬C.同一作品出版社分三次支付的稿酬D.同一作品出版后加印而追加的稿酬9.【例题·计算题】中国公民孙某系自由职业者,2013年出版中篇小说一部,取得稿酬50000元,后因小说加印和报刊连载,分别取得出版社稿酬10000元和报社稿酬3800元。
七年级上册论语12章。
一、原文及翻译。
1. 子曰:“学而时习之,不亦说乎?有朋自远方来,不亦乐乎?人不知而不愠,不亦君子乎?”- 翻译:孔子说:“学习并且按时地去复习,不也很快乐吗?有志同道合的人从远方来,不也很高兴吗?别人不了解我但我不生气,不也是道德上有修养的人吗?”2. 曾子曰:“吾日三省吾身:为人谋而不忠乎?与朋友交而不信乎?传不习乎?”- 翻译:曾子说:“我每天多次地反省自己:替别人办事是不是尽心尽力呢?跟朋友交往是不是真诚,诚实呢?老师传授的知识是否复习过了呢?”3. 子曰:“吾十有五而志于学,三十而立,四十而不惑,五十而知天命,六十而耳顺,七十而从心所欲,不逾矩。
”- 翻译:孔子说:“我十五岁立志于学习;三十岁能够自立;四十岁能不被外界事物所迷惑;五十岁懂得了天命;六十岁能正确对待各种言论,不觉得不顺;七十岁能随心所欲而不越出规矩。
”4. 子曰:“温故而知新,可以为师矣。
”- 翻译:孔子说:“在温习旧知识时,能有新体会、新发现,就可以当老师了。
”5. 子曰:“学而不思则罔,思而不学则殆。
”- 翻译:孔子说:“只学习却不思考,就会感到迷茫而无所适从;只是思考而不学习,就会疑惑而无所得。
”6. 子曰:“贤哉,回也!一箪食,一瓢饮,在陋巷,人不堪其忧,回也不改其乐。
贤哉,回也!”- 翻译:孔子说:“颜回的品质是多么高尚啊!一竹篮饭,一瓢水,住在简陋的小巷子里,别人都忍受不了这种穷困清苦,颜回却没有改变他好学的乐趣。
颜回的品质是多么高尚啊!”7. 子曰:“知之者不如好之者,好之者不如乐之者。
”- 翻译:孔子说:“知道学习的人比不上爱好学习的人;爱好学习的人比不上以学习为乐趣的人。
”8. 子曰:“饭疏食饮水,曲肱而枕之,乐亦在其中矣。
不义而富且贵,于我如浮云。
”- 翻译:孔子说:“我整天吃粗粮,喝冷水,弯着胳膊做枕头,也自得其乐。
用不正当的手段得来的富贵,我把它看作天上的浮云。
”9. 子曰:“三人行,必有我师焉。
2024-2025学年八年级数学上学期期中模拟试卷(华东师大版)(考试时间:120分钟试卷满分:120分)注意事项:1.答卷前,考生务必将自己的姓名、准考证号填写在答题卡上。
2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂黑。
如需改动,用橡皮擦干净后,再选涂其他答案标号。
回答非选择题时,将答案写在答题卡上。
写在本试卷上无效。
3.考试结束后,将本试卷和答题卡一并交回。
4.测试范围:华东师大版第11章数的开方~第13章全等三角形。
5.难度系数:0.68。
第一部分(选择题共30分)一、选择题:本题共10小题,每小题3分,共30分。
在每小题给出的四个选项中,只有一项是符合题目要求的。
1)2.下列运算正确的是()A.a3+a2=a5B.C.a2_a3=a5D.(a2)4=a6【答案】C【解析】A.a3和a2不是同类项,不能合并,故选项错误,不符合题意;B.,故选项错误,不符合题意;C.a2_a3=a5,故选项正确,符合题意;D.(a2)4=a8,故选项错误,不符合题意;故选C.3.如图AB=DE,∠B=∠E,添加下列条件仍不能判定△ABC≌△DEF的是()A.∠A=∠D B.∠ACB=∠DFE C.D.AC=DF【答案】D【解析】A.AB=DE,∠B=∠E,∠A=∠D,可利用ASA证明△ABC≌△DEF,故该选项不符合题意;B.AB=DE,∠B=∠E,∠ACB=∠DFE,可利用AAS证明△ABC≌△DEF,故该选项不符合题意;C.由可得出∠ACF=∠DFE,再结合AB=DE,∠B=∠E,可利用AAS证明△ABC≌△DEF,故该选项不符合题意;D.用AB=DE,∠B=∠E,AC=DF,SSA无法证明△ABC≌△DEF.故该选项符合题意;故选D.4.设a=a在两个相邻整数之间,则这两个整数是()A.2和3B.3和4C.4和5D.5和65.下列因式分解正确的是()A.2a2―4a=2(a2+a)B.―a2+4=(a+2)(a―2)C.a2―10a+25=a(a―10)+25D.a2―2a+1=(―a+1)2【答案】D【解析】A、2a2―4a=2a(a―2),该选项分解错误,不合题意;B、―a2+4=―(a2―4)=―(a+2)(a―2),该选项分解错误,不合题意;C、a2―10a+25=(a―5)2,该选项分解错误,不合题意;D、a2―2a+1=(1―a)2=(―a+1)2,该选项分解正确,符合题意;故选D.6.如图,点A 在DE 上,AC =EC ,∠1=∠2=∠3,则DE 等于( )A .BCB .ABC .DCD .AE +AC 【答案】B 【解析】令AB 、CD 交于点O ,则∵∠1=∠2,∠AOD =∠BOC,∴∠B =∠D ,∵∠2=∠3,,即∠ACB =∠ECD ,在和中,B =?D ACB =?ECD :cAC =EC,,∴AB =ED .故选B .7.如图,边长为2m +3的正方形纸片剪出一个边长为m +3的正方形之后,剩余部分可剪拼成一个长方形,若拼成的长方形一边长为m ,则拼成长方形的面积是( )A .4m 2+12m +9B .3m +6C .3m 2+6mD .2m 2+6m +9【解析】根据题意,得:(2m+3)2―(m+3)2=[(2m+3)+(m+3)][(2m+3)―(m+3)]=(3m+6)m=3m2+6m故选C.8.观察下列各式:,…,根据你发现的规律,若式子=a、b为正整数)符合以上规律,则a+b的平方根是().A.B.4C.―4D.∵,的平方根是;9.设a=x―2022,b=x―2024,c=x―2023.若a2+b2=16,则c2的值是( ) A.5B.6C.7D.8【答案】C【解析】,b=x―2024,c=x―2023,,a―b=2,∵a2+b2=16,∴(a―b)2+2ab=16,∴ c 2=(a ―1)(b +1)=ab +a ―b ―1=6+2―1=7,故选C .10.如图,在中,AB =AC ,点D 、F 是射线BC 上两点,且,若AE =AD ,∠BAD =∠CAF =15°,则下列结论中①是等腰直角三角形;②;③;④BC ―12EF =2AD ―CF .正确的有( )A .1个B .2个C .3个D .4个【答案】D【解析】∵,∴,∵∠BAD =∠CAF ,∴,又∵AB =AC ,∴是等腰直角三角形,故结论①正确;∵AB =AC ,,∴∠B =∠ACB =45°,在和中,AB =AC BAD =?CAE ADa =AE,∴,∴,∴,即,故结论②正确;∵,∴,∴,故结论,,∴,∴,第二部分(非选择题共90分)二、填空题:本题共8小题,每小题3分,共24分。
第11章股利理论与政策【例1·单选题】如果上市公司以其应付票据作为股利支付给股东,则这种股利的方式称为(D )。
A.现金股利B.股票股利C.财产股利D.负债股利【解析】负债股利是公司以负债方式支付的股利,通常以公司的应付票据支付给股东,在不得已情况下也有发行公司债券抵付股利的。
【例2·多选题】下列有关表述中正确的有(ABD )。
A.在除息日之前,股利权从属于股票B.从除息日开始,新购入股票的人不能分享本次已宣告发放的股利C.在股权登记日之前持有或买入股票的股东才有资格领取本期股利,在当天买入股票的股东没有资格领取本期股利D.自除息日起的股票价格中不包含本次派发的股利【解析】凡是在股权登记日这一天登记在册的股东(即在此日及之前持有或买入股票的股东)才有资格领取本期股利。
【例3·多选题】下列属于客户效应理论表述中正确的有(AB )。
A.边际税率较高的投资偏好少分现金股利、多留存B.风险厌恶投资人喜欢高股利支付率的股票C.较高的现金股利会引起低收入阶层的不满D.较少的现金股利会引起高收入阶层的不满【解析】选项CD说反了。
较高的现金股利满足不了高边际税率阶层的需要,而较少的现金股利又会引起低税率阶层的不满。
【例4·单选题】我国上市公司不得用于支付股利的权益资金是(A )。
A.资本公积B.任意盈余公积C.法定盈余公积D.上年未分配利润【解析】按照资本保全原则不能用股本和资本公积金发放股利。
【例5·多选题】从下列哪些因素考虑股东往往希望公司提高股利支付率( AB )。
A.规避风险B.稳定股利收入C.防止公司控制权旁落D.避税【解析】股东为防止控制权稀释,为了避税往往希望公司降低股利支付率。
【例6·多选题】下列情形中会使企业减少股利分配的有(A B D )。
A.市场竞争加剧,企业收益的稳定性减弱B.市场销售不畅,企业库存量持续增加C.经济增长速度减慢,企业缺乏良好的投资机会D.为保证企业的发展,需要扩大筹资规模【解析】选项A、B、D都会导致企业资金短缺,所以为了增加可供使用资金,应尽量多留存,少发股利;但是当经济增长速度减慢,企业缺乏良好的投资机会时,企业会出现资金剩余,所以会提高股利分配。
典型例题分析例11-1已知三个码组为(001010), (101101), (010001). 若用于检错,能检出几位错码?若用于纠错,能纠正几位错码?若同时用于检错和纠错,各能纠、检几位错码?解:根据三个码组可知码的最小码距为04d =。
当用于检错和纠错时,由d 0≥t+e+1可得t=1, e=2, 即检测出3位错码,纠正1位错码,。
★例11-2 设线性码的生成矩阵为 001011100101010110G ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(1) 求监督矩阵H, 确定(n, k )码组中的n, k;(2) 写出监督码位的关系式及该(n, k)码的所有码字;(3) 确定最小码距d 0.解:(1)将生成矩阵G 变成典型形式的生成矩阵,即初等行变换将G 化为典型阵:001011100110010101010101100010G ⎡⎤⎡⎢⎥⎢=→⎢⎥⎢⎢⎥⎢⎣⎦⎣ 可得矩阵为101110011Q ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, 对应的P矩阵为 110011101T P Q ⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦可得监督矩阵H 为[]⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦r 110100H =PI 011010101001,由生成矩阵可得n=6, k=3(2)由于0T TH A ⋅= ,即 543210000a a a a a a ⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦110100011010101001由此可得监督关系式为 23130000a a a a a a a a a ⊕⊕=⎧⎪⊕⊕=⎨⎪⊕⊕=⎩5445设A 为许用码组,则[][]543543100010001A a a a G a a a ⎡⎢=⋅=⎢⎢⎣可计算得该(n, k)码的所有码字如表11-3所示。
(3)由上得出的许用码组可知,该线性码的最小码重d 0=3 (全0码除外).例11-2已知(7, 3)码的生成矩阵G 如下,列出所有许用码组并求监督矩阵10011101001100111G ⎡⎢=⎢⎢⎣解:(1) ⋅A =M G ,用所有可能的M 计算后得到:系统码生成矩阵是100111001001110011100G ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦由此得监督矩阵:1011000111010011000100110001H ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦例11-4 已知某线性码监督矩阵如下,列出所有许用码组。
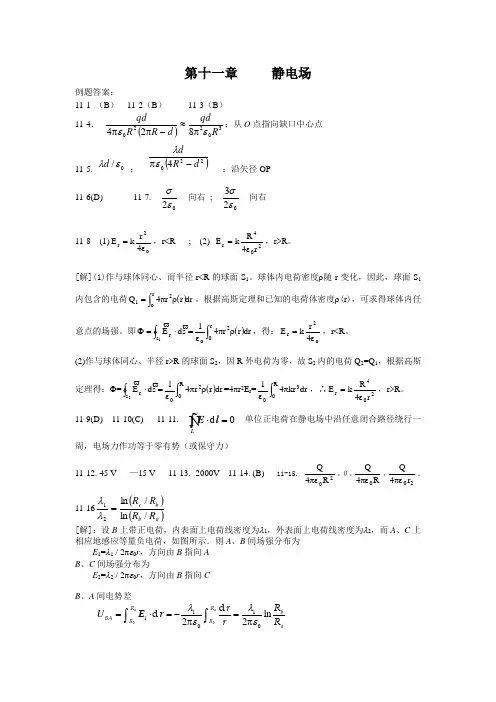
第十一章 静电场例题答案:11-1 (B ) 11-2(B ) 11-3(B ) 11-4.()30220824Rqdd R R qd εεπ≈-ππ;从O 点指向缺口中心点 11-5. 0/ελd ;()2204d R d-πελ ;沿矢径OP 11-6(D) 11-7.02εσ 向右 ; 023εσ向右 11-8 (1)o 2r 4r k E ε=,r <R ; (2) 204r r 4R k E ε=,r >R 。
[解](1)作与球体同心、而半径r <R 的球面S 1。
球体内电荷密度ρ随r 变化,因此,球面S 1内包含的电荷()dr r r 4Q ro 21⎰ρπ=。
根据高斯定理和已知的电荷体密度ρ(r ),可求得球体内任意点的场强。
即()⎰⎰ρπε=⋅=Φr 02s o r dr r r 41s d E 1 ,得:o2r 4r k E ε=,r <R 。
(2)作与球体同心、半径r >R 的球面S 2,因R 外电荷为零,故S 2内的电荷Q 2=Q 1,根据高斯定理得:Φ=()⎰⎰ρπε=⋅R02s 0r dr r r 41s d E 2 =4πr 2E r =⎰πεR3dr kr 41,∴204r r4R kE ε=,r >R 。
11-9(D) 11-10(C) 11-11.d 0L⋅=⎰E l 单位正电荷在静电场中沿任意闭合路径绕行一周,电场力作功等于零有势(或保守力)11-12. 45 V —15 V 11-13. -2000V 11-14. (B) 11-15.20R 4Q πε,0,R 4Q 0πε,20r 4Qπε。
11-16()()a b b c R R R R /ln /ln 21=λλ [解]:设B 上带正电荷,内表面上电荷线密度为λ1,外表面上电荷线密度为λ2,而A 、C 上相应地感应等量负电荷,如图所示.则A 、B 间场强分布为 E 1=λ1 / 2πε0r ,方向由B 指向AB 、C 间场强分布为 E 2=λ2 / 2πε0r ,方向由B 指向CB 、A 间电势差11100ln 22E r d d a a bbR R b BA R R aR r r R λλεε=⋅=-=ππ⎰⎰UB 、C 间电势差 22200ln 22E r d d c c bbR R c BC R R bR r U r R λλεε=⋅=-=ππ⎰⎰因U BA =U BC ,得到 ()()a b b c R R R R /ln /ln 21=λλ 练习详解:11-1. (1)E 0=0;(2)E 0=0;(3)0E =k 2a q 4i ;(4)0E = k 2aq 2i[解](1)如图(a )所示,各点电荷在点o 处产生的场强两两对应相消,所以,点o 处场强E 0=0(2)取图中(b )所示坐标。
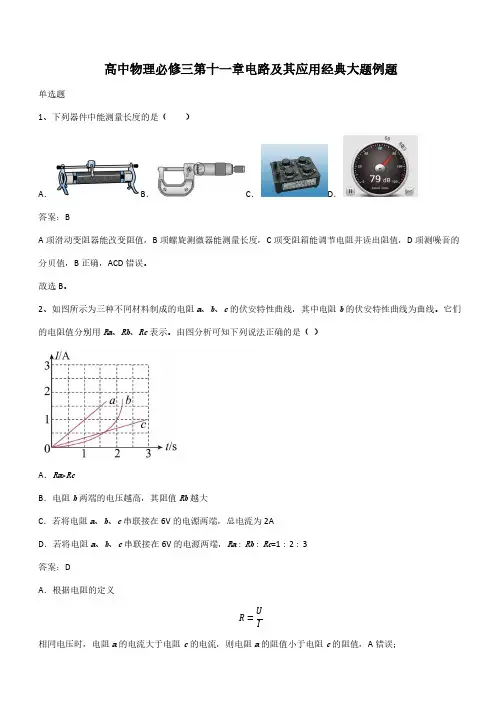
高中物理必修三第十一章电路及其应用经典大题例题单选题1、下列器件中能测量长度的是()A.B.C.D.答案:BA项滑动变阻器能改变阻值,B项螺旋测微器能测量长度,C项变阻箱能调节电阻并读出阻值,D项测噪音的分贝值,B正确,ACD错误。
故选B。
2、如图所示为三种不同材料制成的电阻a、b、c的伏安特性曲线,其中电阻b的伏安特性曲线为曲线。
它们的电阻值分别用Ra、Rb、Rc表示。
由图分析可知下列说法正确的是()A.Ra>RcB.电阻b两端的电压越高,其阻值Rb越大C.若将电阻a、b、c串联接在6V的电源两端,总电流为2AD.若将电阻a、b、c串联接在6V的电源两端,Ra∶Rb∶Rc=1∶2∶3答案:DA.根据电阻的定义R=U I相同电压时,电阻a的电流大于电阻c的电流,则电阻a的阻值小于电阻c的阻值,A错误;B.图像上一点与原点连线的斜率表示电阻的倒数,即I U = 1 R由题图分析可知,电阻b两端的电压越高,其电阻阻值越小,B错误;CD.如果将电阻a、b、c串联接在6 V的电源两端,则流过三个电阻的电流相等,且三个电阻两端的电压之和等于6 V,由题图可知,当电路中的电流为1 A时,电阻a、b、c两端的电压分别为1 V、2 V、3 V,总电压为6 V,此时Ra∶Rb∶Rc=1∶2∶3,C错误,D正确。
故选D。
3、如图所示,两段长度和材料相同、各自粗细均匀的金属导线a、b,单位体积内的自由电子数相等,横截面积之比为S a:S b=1:2。
已知5s内有5×1018个自由电子通过导线a的横截面,则()A.流经导线a的电流为0.32AB.流经导线b的电流为0.16AC.5s内有10×1018个自由电子通过导线b的横截面D.自由电子在导线a和b中移动的速率之比v a:v b=1:2答案:BA.流经导线a的电流为I=qt=5×1018×1.6×10−195A=0.16AA错误;B.因a、b串联,通过的电流相等,所以流经导线b的电流为0.16A,B正确;C.因a、b串联,通过的电流相等,所以相同时间内通过的电荷量相等,即5s内有5×1018个自由电子通过导线b的横截面,C错误;D.根据电流微观表达式I=neSv可得v=I neS由于导线a、b电流相等,单位体积内的自由电子数相等,则自由电子在导线a和b中移动的速率之比为v a v b =S bS a=21D错误。
应付职工薪酬的核算例题习题SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第十二章应付职工薪酬的核算例题习题一、单项选择题1. 应由生产产品负担的职工薪酬,计入( )。
A. 产品成本B. 劳务成本C. 固定资产成本D.无形资产成本2. 应由提供劳务负担的职工薪酬,计入( )。
A. 产品成本B. 劳务成本C. 固定资产成本D.无形资产成本3. 应由在建工程负担的职工薪酬,计入( )。
A. 产品成本B. 劳务成本C. 固定资产成本D.无形资产成本4. 应由无形资产负担的职工薪酬,计入( )。
A. 产品成本B. 劳务成本C. 固定资产成本D.无形资产成本5. 企业为职工缴纳社会保险费和住房公积金,应当在职工为其提供服务的会计期间,根据 ( )的一定比例计算。
A.销售收入B.利润C. 工资总额D.基本工资6. 企业在职工劳动合同到期之前解除与职工的劳动关系一般应当确认因解除与职工的劳动关系给予补偿而产生的 ( )。
A.应付工资B.应付福利费C.应付职工薪酬D. 预计负债7. 下列说法错误的是( )。
A. 职工薪酬包括医疗保险费、养老保险费、失业保险费、工伤保险费和生育保险费等社会保险费B. 职工薪酬包括工会经费和职工教育经费C. 职工薪酬包括因解除与职工的劳动关系给予的补偿D. 职工薪酬不包括因解除与职工的劳动关系给予的补偿8. 关于辞退福利下列说法中错误的是( )。
A. 辞退福利通常采取在解除劳动关系时一次性支付补偿的方式B. 正式的辞退计划或建议应当经过批准C. 辞退福利应当计入当期产品成本,并确认应付职工薪酬D. 辞退工作一般应当在一年内实施完毕,但因付款程序等原因使部分款项推迟至一年后支付的,视为符合应付职工薪酬的确认条件。
9. 下列说法错误的是 ( )。
A. 应由生产产品负担的职工薪酬,计入产品成本B. 应由在建工程、无形资产负担的职工薪酬,计入建造固定资产或无形资产成本C. 应由提供劳务负担的职工薪酬,计入劳务成本D. 应由在建工程、无形资产负担的职工薪酬,计入当期损益10.非货币性福利,不包括 ( )。
第十一章 简单机械和功一、杠杆1、杠杆:一根在力的作用下可绕一固定点转动的硬棒。
(可以是任意形状的,不一定是直的)支点:杠杆绕着转动的点。
动力:使杠杆转动的力。
阻力:阻碍杠杆转动的力。
——方向判断动力臂:从支点到动力作用线的距离。
阻力臂:从支点到阻力作用线的距离。
2、杠杆的平衡条件——杠杆原理杠杆在动力和阻力作用下,处于静止状态,叫做杠杆平衡动力*动力臂=阻力*阻力臂(1122F L F L =)省力杠杆(费距离):动力臂大于阻力臂——动力小于阻力费力杠杆(省距离):动力臂小于阻力臂——动力大于阻力等臂杠杆(不省力也不费力):动力臂等于阻力臂——动力等于阻力二、滑轮——绕轴能转动的轮子——杠杆的变形。
1、定滑轮:轴的位置固定不动的滑轮。
——等臂杠杆(动阻力相等,可改变动力的方向)动滑轮:轴的位置随被拉的物体一起运动的滑轮。
——支点在一侧的不等臂杠杆(动力臂是阻力臂的两倍,使用时可以省一半的力,但不可以改变动力方向)。
滑轮组:定滑轮和动滑轮组合成滑轮组,既省力又可改变力的方向。
——两种绳子绕法用滑轮组起吊重物时,滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之几。
s nh = n 是与动滑轮相连的绳子段数2、滑轮组的组装三、功——无既省力又省距离的机械(例题)1、功:如果一个力作用在物体上,物体在这个力的方向上移动了一段距离,我们就说这个力对物体做了功。
2、做功的两要素:作用在物体上的力和物体在力的方向上通过的距离。
(公式:W FS =单位:焦耳J )3、功的原理:使用机械时,人们所做的功,都不会少于不用机械时所做的功。
或使用任何机械都不省功。
4、三种不做功的情况有距离无力(不劳无功);有力无距离(劳而无功);力与距离垂直四、功率1、功率:单位时间内所做的功。
(物理意义表示做功快慢的物理量)2、公式: P=W/t 单位:瓦特 W 1(F G G n =+动)3、功率的测量:p=mgh/t五、机械效率1.有用功:为达到目的必须做的功。
EXAMPLE 11.4 Circular MotionA particle moves in the xy plane in a circular path of radius r, as shown in Figure 11.11.(a) Find the magnitude and direction of its angular momentum relative to O when its linear velocity is v.Solution You might guess that because the linear momentum of the particle is always changing (in direction, not magnitude), the direction of the angular momentum must also change. In this example, however, this is not the case. The magnitude of L is given byrmvrmvrL=︒=90sin vlar to)perpendicu(forThis value of L is constant because all three factors on the right are constant. The direction of L also is constant, even though the direction of p= m v keeps changing. You can visualize this by sliding the vector v in Figure 11.11 parallel to itself until its tail meets the tail of r and by then applying the right-hand rule. (You can use v to determine the direction of L = r×p because the direction of p is the same as the direction of v.) Line up your fingers so that they point along r and wrap your fingers into the vector v. Your thumb points upward and away from the page; this is the direction of L. Hence, we can write the vector expression L = (mvr)k. If the particle were to move clockwise, L would point downward and into the page.(b) Find the magnitude and direction of L in terms of the particle’s angular speed ω. Solution Because v = rωfor a particle rotating in a circle, we can express L asωωI=L==2mrmvrwhere I is the moment of inertia of the particle about the z axis through O. Because the rotation is counterclockwise, the direction of ω is along the z axis (see Section 10.1). The direction of L is the same as that of ω, and so we can write the angular momentum as L =Iω=Iωk.Exercise A car of mass 1 500 kg moves with a linear speed of 40 m/s on a circular race track of radius 50 m. What is the magnitude of its angular momentum relative to the center of the track?Answer 3.0×106 kg·m2/sFigure 11.11 A particle moving in a circle of radius r has an angularmomentum about O that has magnitude mvr. The vector L= r×ppoints out of the diagram.EXAMPLE 11.5 Bowling BallEstimate the magnitude of the angular momentum of a bowling ball spinning at 10 rev/s, as shown in Figure 11.13.Solution We start by making some estimates of the relevant physical parameters and model the ball as a uniform solid sphere. A typical bowling ball might have a mass of 6 kg and a radius of 12 cm. The moment of inertia of a solid sphere about an axis through its center is, from Table 10.2,222m kg 035.0)m 12.0)(kg 6(5252⋅===MR I Therefore, the magnitude of the angular momentum iss/m kg 2.2 )rad/rev 2)(rev/s 10)(m kg 035.0(22⋅=⋅==πωI L Because of the roughness of our estimates, we probably want to keep only one significant figure, and so L=2 kg ·m 2/sFigure 11.13 A bowling ball that rotates about the z axis in the directionshown has an angular momentum L in the positive z direction.If the direction of rotation is reversed, L points in the negative z direction. EXAMPLE 11.6 Rotating RodA rigid rod of mass M and length l is pivoted without friction at its center (Fig. 11.14). Two particles of masses m 1 and m 2 are connected to its ends. The combination rotates in a vertical plane with an angular speed ω. (a) Find an expression for the magnitude of the angular momentum of the system.Solution This is different from the last example in that we now must account for the motion of more than one object. The moment of inertia of the system equals the sum of the moments of inertia of the three components: the rod and the two particles. Referring to Table 10.2 to obtain the expression for the moment of inertia of the rod, and using the expression I = mr 2 for each particle, we find that the total moment of inertia about the z axis through O is)3(4 )2()2(12121222212m m M l l m l m Ml I ++=++=Therefore, the magnitude of the angular momentum isωω)3(4212m m M l I L ++== (b) Find an expression for the magnitude of the angular acceleration of the system when the rod makes an angle θ with the horizontal.Solution If the masses of the two particles are equal, then the system has no angular acceleration because the net torque on the system is zero when m 1= m 2 . If the initial angle θ is exactly π/2 or -π/2 (vertical position), then the rod will be in equilibrium. To find the angular acceleration of the system at any angle θ, we first calculate the net torque on the system and then use ∑τext = I α to obtain an expression for α.The torque due to the force m 1g about the pivot ispage) of out ( cos 2111==τθτl g mFigure 11.14 Because gravitational forces act on the rotating rod,there is in general a net nonzero torque about O when m 1 = m 2 . Thisnet torque produces an angular acceleration given by α=∑τext / I . The torque due to the force m 2g about the pivot ispage) into ( cos 2-222τθτl g m = Hence, the net torque exerted on the system about O isθτττcos )(212121gl m m ext ∑-=+=The direction of ∑τext is out of the page if m 1>m 2 and is into the page if m2>m1 . To find α, we use ∑τext = Iα, where I was obtained in part (a):)3/(cos )(22121m m M l g m m I ext ++-==∑θτα Note that α is zero when θ is π/2 or -π/2 (vertical position) and is a maximum when θ is 0 or π (horizontal position).Exercise If m 2>m 1, at what value of θ is ω a maximum?Answer θ=-π/2.EXAMPLE 11.7 Two Connected MassesA sphere of mass m 1 and a block of mass m 2 are connected by a light cord that passes over a pulley, as shown in Figure 11.15. The radius of the pulley is R , and the moment of inertia about its axle is I . The block slides on a frictionless, horizontal surface. Find an expression for the linear acceleration of the two objects, using the concepts of angular momentum and torque.At the instant the sphere and block have a common speed v ,the angular momentum of the sphere is m 1vR , and that of the block is m 2vR . At the same instant, the angularmomentum of the pulley is I ω = Iv /R . Hence, the total angular momentum of the system isRv I vR m vR m L ++=21 (1)Now let us evaluate the total external torque acting on the system about the pulley axle. Because it has a moment arm of zero, the force exerted by the axle on the pulley does not contribute to the torque. Furthermore, the normal force acting on the block is balanced by the force of gravity m 2g, and so these forces do not contribute to the torque. The force of gravity m 1g acting on the sphere produces a torque about the axle equal in magnitude to m 1gR, where R is the moment arm of the force about the axle. (Note that in this situation, the tension is not equal to m 1g.) This is the total external torque about the pulley axle; that is, ∑τext = m 1gR. Using this result, together with Equation (1) and Equation 11.23, we find])[(211ext Rv I Rv m m dt d gR m dt dL ++==∑τ dtdv R I dt dv R m m gR m ++=)( )2(211 Because dv/dt = a , we can solve this for a to obtain2211/)(R I m m g m a ++=You may wonder why we did not include the forces that the cord exerts on the objects inevaluating the net torque about the axle. The reason is that these forces are internal to thesystem under consideration, and we analyzed the system as a whole. Only external torques contribute to the change in the system’s angular momentum.。