第2讲 直流电机的调速方法
- 格式:pdf
- 大小:1.90 MB
- 文档页数:40
直流电动机有哪几种调速方法?各有哪些特点?答:直流电动机有三种调速方法:1)调节电枢供电电压U ;2)减弱励磁磁通Φ;3)改变电枢回路电阻R 。
特点:对于要求在一定范围内无极平滑调速的系统来说,以调节电枢供电电压的方式为最好。
改变电阻只能有级调速;减弱磁通虽然能够平滑调速,但调速范围不大,往往只是配合调压方案,在基速(额定转速)以上作小范围的弱磁升速。
晶闸管—电动机系统当电流断续时机械特性的显著特点是什么?答:电流断续时的电压、电流波形图(Ⅰ10P 、Ⅱ 12P )(三相零式为例)。
断续时,0d u 波形本身与反电势E 有关,因而就与转速n 有关,而不是像电流连续时那样只由控制角α决定的常值。
机械特性呈严重的非线性,有两个显著的特点:第一个特点是当电流略有增加时,电动机的转速会下降很多,即机械特性变软。
当晶闸管导通时,整流电压波形与相电压完全一致,是电源正弦电压的一部分。
当电流断续后,晶闸管都不导通,负载端的电压波形就是反电势波形。
电流波形是一串脉冲波,其间距为︒120,脉冲电流的底部很窄。
由于整流电流平均值d I 与电流波形包围的面积成正比,如果电流波形的底部很窄,为了产生一定的d I ,各相电流峰值必须加大,因为RE u i d d -=,而整流输出的瞬时电压d u 的大小由交流电源决定,不能改变。
也就是说应使E 下降很多即转速下降很多,才能产生一定的d I ,这就是电流断续时机械特性变软的原因。
第二个特点是理想空载转速0n 升高。
因为理想空载时0=d I ,所以2m a x 02U u E d ==,所以0n 升高。
简述直流PWM 变换器电路的基本结构。
答:直流 PWM 变换器基本结构如图所示,包括 IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流 PWM 变换器,通过改变直流 PWM 变换器中 IGBT 的控制脉冲占空比来调节直流 PWM 变换器输出电压大小,二极管起续流作用。
Ug0Ton T t 直流PWM 变换器基本结构直流PWM 变换器输出电压的特征是什么?答:频率一定、宽度可调的脉动直流电压。
直流电机的调速方法一、前言直流电机是工业生产中常用的驱动设备,它具有调速范围广、转矩平稳等优点。
在实际应用中,为了满足不同的工艺要求,需要对直流电机进行调速。
本文将介绍直流电机的调速方法。
二、基本原理直流电机的调速原理是通过改变电源电压和/或改变电枢回路中的电阻来改变电机的转速。
当电压增大或者回路阻值减小时,会使得转矩增大,从而使得转速提高;反之亦然。
三、调速方式1. 串联型调速串联型调速是通过改变外接串联在直流电机上的可变阻值来改变回路总阻值,从而达到降低转矩和减缓转速的目的。
具体步骤如下:(1)将可变阻器串联在直流电机中;(2)当可变阻器阻值增加时,回路总阻值增加,从而使得输出功率减小;反之亦然;(3)通过逐渐增加或减小可变阻器的阻值来实现调节。
2. 并联型调速并联型调速是通过改变外接并联在直流电机上的可变阻值来改变电枢回路的总电阻,从而达到提高转矩和加快转速的目的。
具体步骤如下:(1)将可变阻器并联在直流电机中;(2)当可变阻器阻值增加时,电枢回路总电阻增加,从而使得输出功率减小;反之亦然;(3)通过逐渐增加或减小可变阻器的阻值来实现调节。
3. 电枢调速电枢调速是通过改变直流电机中的电枢回路中的电阻来改变回路总阻值,从而达到降低转矩和减缓转速的目的。
具体步骤如下:(1)将可变阻器连接在直流电机的电枢回路上;(2)当可变阻器阻值增加时,回路总阻值增加,从而使得输出功率减小;反之亦然;(3)通过逐渐增加或减小可变阻器的阻值来实现调节。
4. 磁通调速磁通调速是通过改变直流电机中励磁回路中串联在励磁线圈上的可变抵抗来改变磁通量大小,从而达到改变转速和转矩的目的。
具体步骤如下:(1)将可变抵抗串联在励磁线圈上;(2)当可变抵抗阻值增加时,回路总阻值增加,从而使得磁通量减小,输出功率减小;反之亦然;(3)通过逐渐增加或减小可变抵抗的阻值来实现调节。
四、注意事项1. 在进行调速时,应根据直流电机的额定参数和工作要求进行合理选择。
直流电动机调速方法有
直流电动机的调速方法主要有以下几种:
1. 变电压调速法:通过改变直流电机的输入电压来调整电机的转速。
增大输入电压可以提高电机的转速,减小输入电压可以降低电机的转速。
2. 变电流调速法:通过改变电机的励磁电流来调整电机的转速。
增大励磁电流可以提高电机的转速,减小励磁电流可以降低电机的转速。
3. 变极数调速法:通过改变电枢绕组和励磁绕组的并联组合方式来调整电机的转速。
增加并联绕组的极数可以提高电机的转速,减小并联绕组的极数可以降低电机的转速。
4. 变电阻调速法:通过改变电枢绕组或励磁绕组的电阻来调整电机的转速。
增大电阻可以降低电机的转速,减小电阻可以提高电机的转速。
5. 变频调速法:通过改变电机所接受的频率来调整电机的转速。
提高频率可以提高电机的转速,降低频率可以降低电机的转速。
这些调速方法可以单独应用,也可以结合使用,以实现更精确的电机转速调节。
简述直流电动机的调速方法。
直流电动机是一种无刷直流电机,其工作原理基于电枢的旋转,其调速方法
主要有以下几种:
1. 电阻调速:将直流电动机接入电阻器中,通过改变电阻的大小来控制电动机的转速。
这种方法的优点是调速范围宽,但缺点是调速效率低,而且电阻器易损坏。
2. 电容调速:在直流电动机的转轴上加装电容,通过改变电容的大小来控制电动机的转速。
这种方法的优点是调速效率高,但缺点是需要较大的电容,而且容易引起电动机故障。
3. 串激调速:在直流电动机的转轴上串联一个电阻和一个电感,通过改变它们的相对大小来控制电动机的转速。
这种方法的优点是调速范围宽,但缺点是需要复杂的电路,而且容易引起电动机故障。
4. 反相调速:在直流电动机的转轴上加装一个电容器和一个电阻,通过改变它们的相对大小来控制电动机的转速。
这种方法的优点是调速效率高,但缺点是需要较大的电容器,而且容易引起电动机故障。
除了以上几种调速方法外,还有一些其他的方法,例如脉冲调速、积分调速等。
这些方法在实际应用中要根据具体情况选择使用。
直流电动机的调速方法的选择应该考虑到调速范围、调速效率、电动机的性能和稳定性等因素。
在实际应用中,需要根据具体的情况和要求选择合适的调速方法。
直流电机的调速的方法直流电机是一种常见的电动机,它的特性是输出电压和电流是直流的,因此将其应用在不同的机械设备中时,需要根据实际需要对其进行调速,从而满足不同的工作要求。
直流电机调速的方法主要有以下几种:1. 电压调速法电压调速法也称为励磁调速法,就是通过改变电源电压的大小来改变电机的转速。
在实际应用中,常常采用直流电阻切换或场极并联调节的方法来达到不同的调速效果。
在电压调速法中,当电源电压增加时,电机的励磁电流也随之增加,进而使得电机的转矩增大,从而实现调速的目的。
但是,这种调速方式的效率较低,因为当电压降低时,电机的励磁电流也会随之减小,从而使得电机的转矩下降,甚至达不到需要的工作要求。
2. 电流调速法电流调速法也称为串联调速法,就是通过改变电机的电阻大小来改变电机的转速。
在实际应用中,常常采用外加电阻或场极串联调节的方法来实现不同的调速效果。
在电流调速法中,当电阻增加时,电机的总电阻增大,进而使得电机的总电流减小,这时电机的转速也会相应降低,从而实现调速的目的。
但是这种调速方式也存在一定的缺陷,主要是因为电阻耗散能量较大,因此这种调速方式的效率较低。
3. 常规调速法常规调速法是根据工作负载的大小来调节电机的转速。
当工作负载增大时,需要电机输出更多的转矩,从而调高电机的转速;当工作负载减小时,需要电机输出较小的转矩,从而调降电机的转速。
常规调速法的优点是可靠性高、调节精度高,但是需要根据不同的工作负载进行反复调整,因此调节时间较长,不便于实时调节。
4. 变频调速法变频调速法是目前应用最广泛的电机调速方法,它通过改变电机供电电压频率来调节电机转速。
具体来说,变频器是将固定电压电源的输入电压通过变换器组件转换为定电压、可调频率的高压电源,通过改变这个高压电源的输出频率来调节电机的转速。
变频调速法的优点是调速范围大、调节精度高、效率高、稳定性好,因此在各种领域中都有广泛的应用,例如机械制造、电力工业、化工、交通运输等。
直流电机调速的三种方法及公式嘿,朋友们!今天咱来聊聊直流电机调速的那些事儿。
直流电机调速啊,就好比是驾驭一匹烈马,得有合适的方法和技巧才能让它乖乖听话,按照咱的心意跑起来。
先来说说第一种方法,那就是改变电枢电压啦。
就像给马调整缰绳的松紧一样,通过改变电枢电压,就能控制电机的速度。
这就好比你开车的时候,踩油门轻重不一样,车速也就不一样啦。
这其中的公式呢,就是转速和电枢电压成正比关系哦。
再讲讲第二种方法,改变电枢回路电阻。
这就像是给马走的路设置不同的阻力,电阻大了,电机转得就慢些;电阻小了,电机就跑得快啦。
不过这种方法不太常用哦,毕竟改变电阻有时候不太方便呢。
最后说说第三种,改变励磁电流。
这就好像是调整马的精神状态,励磁电流一变,电机的速度也跟着变啦。
咱举个例子啊,想象一下,直流电机就像是一个大力士,电枢电压就是他的力量源泉,决定他能使多大劲儿;电枢回路电阻就是他脚下的绊脚石,多了就跑不快;励磁电流呢,就是他的心情,心情好干劲足,速度就快。
这三种方法各有各的特点和用处呢。
有时候我们根据实际情况,选择最合适的那种来给直流电机调速。
就像我们出门,得根据天气、路程等因素选择是走路、骑车还是开车一样。
在实际应用中,可不能马虎哦。
要仔细研究电机的特性,根据需要来选择调速方法。
不然啊,就像是让马乱了套,可就不好啦。
所以啊,直流电机调速可不是一件简单的事儿,得好好琢磨琢磨。
要把这三种方法都掌握好,就像有了三把钥匙,能打开不同情况下电机调速的大门。
朋友们,你们说是不是这个理儿呀?咱可得把这直流电机调速给玩转咯,让它为我们的各种设备好好服务呀!这就是直流电机调速的三种方法及公式啦,大家都记住了吗?。
直流电机调速公式
直流电机调速公式是用来描述直流电机转速与电压和负载之间的关系的数学公式。
直流电机调速是指通过调节电压或改变负载来控制电机的转速。
直流电机调速公式可以用以下方式表示:
N = k * V / Φ
其中,N表示电机的转速,k是一个常数,V表示电压,Φ表示磁通量。
这个公式可以解释为:电机的转速与电压成正比,与磁通量成反比。
当电压增加时,电机转速也会增加;当磁通量增加时,电机转速会减小。
直流电机调速公式的推导基于电机的基本原理和电磁感应定律。
直流电机是通过电流在电枢线圈中产生的磁场和永磁体之间的相互作用来产生转矩的。
当电压和负载发生变化时,电机内部的磁场也会发生变化,从而影响电机的转速。
调速公式的推导过程比较复杂,需要考虑电机的内部结构、磁场分布、电流分布等因素。
在实际应用中,可以通过调节电压或改变负载来实现对电机转速的控制。
例如,通过增加电压可以提高电机的转速,而通过改变负载可以降低电机的转速。
直流电机调速公式在工业生产和科学研究中具有重要意义。
它可以
帮助工程师和研究人员设计和优化电机控制系统,实现精确的转速调节。
同时,它也为电机的故障诊断和维修提供了理论基础。
直流电机调速公式是描述电机转速与电压和负载之间关系的重要工具。
掌握和理解这个公式可以帮助人们更好地理解和应用直流电机调速技术。
通过合理地调节电压和负载,可以实现对电机转速的精确控制,满足不同应用场景的需求。
直流电机的调速方法
一、概述
一是调节电枢电压,二是调节励磁电流,
1、常见的微型直流电机,其磁场都是固定的,不可调的永磁体,
所以只好调节电枢电压。
调节电枢电压方法:
常用的一是可控硅调压法,再就是脉宽调制法(PWM)。
PWM的H型属于调压调速。
PWM的H桥只能实现大功率调速。
国内的超大功率调速还要依靠可控硅实现可控整流来实现直流电机的调压调速。
2、弱磁调速,通过适当减弱励磁磁场的办法也可以调速。
二、直流电机与交流电机调速比较
最大的优点就是直流电机可以实现“平滑而经济的调速”;直流电机的调速不需要其它设备的配合,可通过改变输入的电压/电流,或者励磁电压/电流来调速。
交流永磁同步的调速是靠改变频率来实现的,需要变频器。
直流电机虽不需要其它的设备来帮助调速,但自身的结构复杂,制造成本高;在大功率可控晶闸管大批量使用之前,直流电动机用于大多的调速场合。
在大功率可控晶闸管工业生产化后,交流电动机的调速变得更简单了,交流电动机的制造成本低廉,使用寿命长等优点就表现出来。
三、直流电机的调速方法的优缺点
不同的需要,采用不同的调速方式,应该说各有什么特点。
1.在全磁场状态,调电枢电压,适合应用在零至基速以下范围内调速。
不能达到电机的最高转速。
2.在电枢全电压状态,调激磁电压,适合应用在基速以上,弱磁升速。
不能得到电机的较低转速。
3.在全磁场状态,调电枢电压,电枢全电压之后,弱磁升速。
适合应用在调速范围大的情况。
这是直流电机最完善的调速方式,但设备复杂,造价高。
直流电动机的调速方法1.改变牵引电动机端电压U D :U D=D A U FA D ——主电路每条之路串联的电动机台数;上式说明:改变每条支路电动机台数叫串并联转换。
若两台电动机是串联 A D =2;若两台电动机是并联 A D =1;电动机端电压增加一倍,电动机转速n D 就可以提高一倍。
故提高电动机端电压可以通过主电路中串并联转换,也可以通过调节发电机的端电压U F 进行。
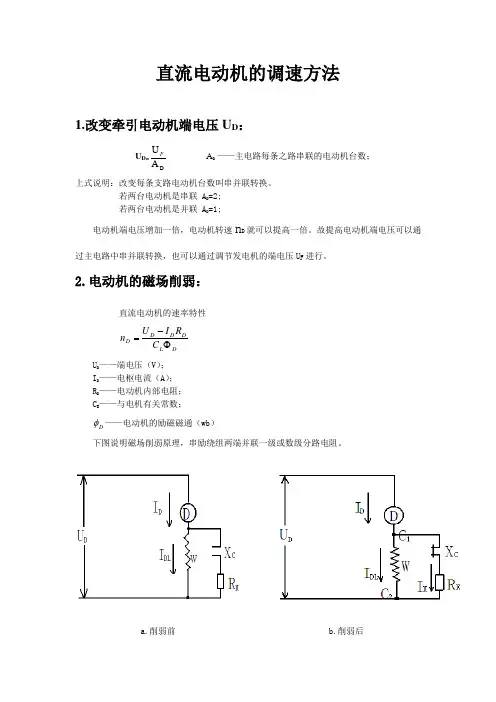
2.电动机的磁场削弱:直流电动机的速率特性DL D D D D C R I U n Φ-= U D ——端电压(V );I D ——电枢电流(A );R D ——电动机内部电阻;C E ——与电机有关常数;D φ——电动机的励磁磁通(wb )下图说明磁场削弱原理,串励绕组两端并联一级或数级分路电阻。
a.削弱前 b.削弱后a.磁场削弱进行之前削弱接触器X C 没有闭合,磁场削弱电阻对串励绕阻W 不起作用,即串励绕阻的绕阻电流等于电枢电流 I D =I DL ,这种状态为“满磁场”。
b. 磁场削弱接触器X C 闭合后,磁场削弱电阻对串励绕阻W 起分路作用,所流过绕阻电流若是小于电枢电流,即,I DL <I D 这种状态就是磁场削弱。
电动机励磁电流I DL 与电枢电流比值β%表示磁场削弱的深度,β称电动机磁场削弱系数。
β=D DL I I (%)在恒压情况下, 按n D=D e DD D C R I U φ- D φ减小,n D 增加说明由恒电压电源供电的电动机,磁场削弱后电动机的稳定转速要高于磁场削弱前电动机的转速。
但n D 是靠从电源取得更大的功率来保证。
3.变压下的磁场削弱时的速率特性和转矩特性对于串励电动机,在磁场削弱的情况下,励磁电流只是电枢电流的一部分,即I DL = β I D 若电动机的磁通D φ与励磁电流DL I 成正比从n D=De D D D C R I U φ-看出,同一D I 下n D 提高了β1倍。
从D M D I C M D φ=(C M ——电动机有关常数)可以看出转矩M D 减小了β倍。
第八章直流调速系统8.1 概述调速方法通常有机械的、电气的、液压的、气动的几种,仅就机械与电气调速方法而言,也可采用电气与机械配合的方法化机械变速机构,提高传动效率,操作简单,易于获得无极调速,便于实现远距离控制和自动控制,因此,在生产机械中广泛采由于直流电动机具有极好的运动性能和控制特性,尽管它不如交流电动机那样结构简单、价格便宜、制造方便、维护容易,但是近年来,随着计算机技术、电力电子技术和控制技术的发展,交流调速系统发展很快,在许多场合正逐渐取代直流调速系统。
但是主要形式。
在我国许多工业部门,如轧钢、矿山采掘、海洋钻探、金属加工、纺织、造纸以及高层建筑等需要高性能可控电力拖动调速系统在理论上和实践上都比较成熟,从控制技术的角度来看,它又是交流调速系统的基础。
因此,我们先着重讨论直流调速8.1.1直流电机的调速方法根据第三章直流电机的基本原理,由感应电势、电磁转矩以及机械特性方程式可知,直流电动机的调速方法有三种:(1)调节电枢供电电压U。
改变电枢电压主要是从额定电压往下降低电枢电压,从电动机额定转速向下变速,属恒转矩系统来说,这种方法最好。
变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。
(2)改变电动机主磁通。
改变磁通可以实现无级平滑调速,但只能减弱磁通进行调速(简称弱磁调速),从电机额遇到的时间常数同变化遇到的相比要大得多,响应速度较慢,但所需电源容量小。
(3)改变电枢回路电阻。
在电动机电枢回路外串电阻进行调速的方法,设备简单,操作方便。
但是只能进行有级调速么调速作用;还会在调速电阻上消耗大量电能。
改变电阻调速缺点很多,目前很少采用,仅在有些起重机、卷扬机及电车等调速性能要求不高或低速运转时间不长的传动速配合使用,在额定转速以上作小范围的升速。
因此,自动控制的直流调速系统往往以调压调速为主,必要时把调压调速和弱磁直流电动机电枢绕组中的电流与定子主磁通相互作用,产生电磁力和电磁转矩,电枢因而转动。
直流电动机的调速方法直流电动机分为有换向器和无换向器两大类。
直流电动机调速系统较早采用恒定直流电压给直流电动机供电,通过改变电枢回路中的电阻来实现调速。
这种方法简单易行、设备制造方便、价格低廉;但缺点是效率低、机械特性软,不能得到较宽和平滑的调速性能。
该法只适用在一些小功率且调速范围要求不大的场合。
30年代末期,发电机-电动机系统的出现才使调速性能优异的直流电动机得到广泛应用。
这种控制方法可获得较宽的调速范围、较小的转速变化率和平滑的调速性能。
但此方法的主要缺点是系统重量大、占地多、效率低及维修困难。
近年来,随着电力电子技术的迅速发展,由晶闸管变流器供电的直流电动机调速系统已取代了发电机-电动机调速系统,它的调速性能也远远地超过了发电机-电动机调速系统。
特别是大规模集成电路技术以及计算机技术的飞速发展,使直流电动机调速系统的精度、动态性能、可靠性有了更大的提高。
电力电子技术中IGBT等大功率器件的发展正在取代晶闸管,出现了性能更好的直流调速系统。
直流电动机的转速n和其他参量的关系可表示为(1)式中Ua——电枢供电电压(V);Ia ——电枢电流(A);Ф——励磁磁通(Wb);Ra——电枢回路总电阻(Ω);CE——电势系数,,p为电磁对数,a为电枢并联支路数,N为导体数。
由式1可以看出,式中Ua、Ra、Ф三个参量都可以成为变量,只要改变其中一个参量,就可以改变电动机的转速,所以直流电动机有三种基本调速方法:(1)改变电枢回路总电阻Ra;;(2)改变电枢供电电压Ua;(3)改变励磁磁通Ф。
1. 改变电枢回路电阻调速各种直流电动机都可以通过改变电枢回路电阻来调速,如图1(a)所示。
此时转速特性公式为(2)式中Rw为电枢回路中的外接电阻(Ω)。
{{分页}}图1(a) 改变电枢电阻调速电路图1(b) 改变电枢电阻调速时的机械特性当负载一定时,随着串入的外接电阻Rw的增大,电枢回路总电阻R=(Ra+Rw)增大,电动机转速就降低。