第四章 振动波动作业
- 格式:ppt
- 大小:1.43 MB
- 文档页数:32
第四章导线和地线的振动和防振第一节振动的类型和特点张紧在空间的导线,由于受到各种因素的影响而引起导线的振动。
现在已知的在架空线上发生的振动的类型主要有微风振动、次档距振荡、脱冰跳跃、横向碰击、电晕舞动、短路振荡和湍流振动等。
下面简要叙述这些振动的特点、产生的原因、危害和防止措施。
一、微风振动。
微风振动是在风速为0.5~10m/s的均匀风垂直吹向导线时,在导线背风面形成稳定的涡流。
由于周期性涡流升力分量的作用,使导线发生振动。
二、舞动。
当风速为5~15m/s左右的风力作用在非对称外形的导线上,最常见的情况是作用在覆冰厚度不对称的导线上时,由于风力作用角度的变化产生的脉动风力,破坏了导线的静力平衡,而形成大幅度舞动。
一般认为,在一个档距中,舞动的起始点发生在弧垂较低的部位,而不是在导线悬挂点较高的部分。
因为弧垂最低点受到的垂直重力和水平分力最小,故最容易被特定的风力举起,于是舞动振荡现象便会向全档距传播。
其特点是振动大、频率低、持续时间长(振幅在10m以下、频率为0.1~1Hz)。
在一个档距中,往往会出现1~4个半的振动波。
振动的持续时间可达数小时之久。
在一个档距中发生舞动时,常常波及到相邻档。
导线某一点的振动轨迹通常呈椭圆形。
导线覆冰不均匀是导致舞动现象的根本因素。
通常发生在气温0℃左右的平原或丘陵地区,而且粗的导线比细的导线,分裂导线比单导线,更容易引起舞动。
舞动现象在线路上极少发生,而一旦发生,便会造成严重后果。
不仅导线、绝缘子、金具或杆塔构件受到损伤,还可能引起相间或相对地的短路事故。
如2008年1月下旬,在河南、湖南、江西等地因冻雨和暴雪持续半月至一月余,出现了持续70小时以上、振幅达8米以上的强烈舞动,动态荷载达静态荷载的3倍以上,造成多处倒塔事故。
防止舞动造成危害的主要措施是增大线间距离、缩小档距、采用防冰导线和研制舞动抑制器等。
三、次档距振荡。
次档距振荡是指发生在分裂导线相邻两间隔棒之间的档距中的一种振荡。
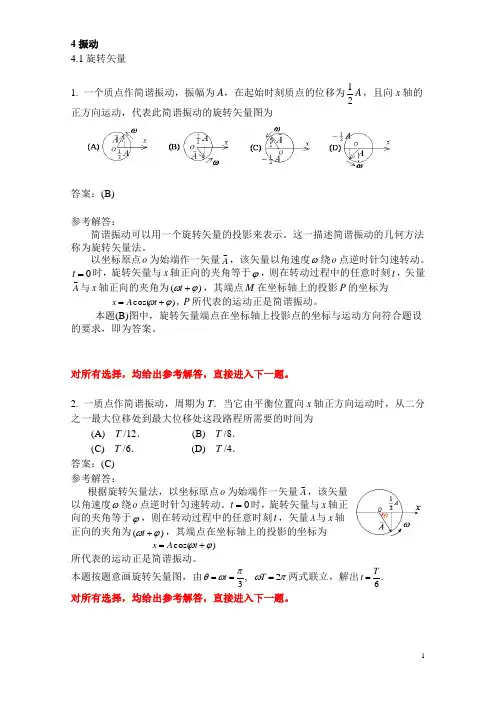
4振动4.1旋转矢量1. 一个质点作简谐振动,振幅为A ,在起始时刻质点的位移为A 21,且向x 轴的正方向运动,代表此简谐振动的旋转矢量图为答案:(B)参考解答:简谐振动可以用一个旋转矢量的投影来表示。
这一描述简谐振动的几何方法称为旋转矢量法。
以坐标原点o 为始端作一矢量A,该矢量以角速度ω绕o 点逆时针匀速转动。
0=t 时,旋转矢量与x 轴正向的夹角等于ϕ,则在转动过程中的任意时刻t ,矢量A与x 轴正向的夹角为)(ϕω+t ,其端点M 在坐标轴上的投影P 的坐标为)cos(ϕω+=t A x ,P 所代表的运动正是简谐振动。
本题(B)图中,旋转矢量端点在坐标轴上投影点的坐标与运动方向符合题设的要求,即为答案。
对所有选择,均给出参考解答,直接进入下一题。
2. 一质点作简谐振动,周期为T .当它由平衡位置向x 轴正方向运动时,从二分之一最大位移处到最大位移处这段路程所需要的时间为 (A) T /12. (B) T /8. (C) T /6. (D) T /4. 答案:(C) 参考解答:根据旋转矢量法,以坐标原点o 为始端作一矢量A,该矢量以角速度ω绕o 点逆时针匀速转动。
0=t 时,旋转矢量与x 轴正向的夹角等于ϕ,则在转动过程中的任意时刻t ,矢量A与x 轴正向的夹角为)(ϕω+t ,其端点在坐标轴上的投影的坐标为)cos(ϕω+=t A x 所代表的运动正是简谐振动。
本题按题意画旋转矢量图,由,3πωθ==t πω2=T 两式联立,解出.6Tt =对所有选择,均给出参考解答,直接进入下一题。
4.2振动曲线、初相1. 一质点作简谐振动.其运动速度与时间的曲线如图所示.若质点的振动规律用余弦函数描述,则其初相应为(A) π/6. (B) 5π/6. (C) -5π/6.(D) -π/6. (E) -2π/3.答案:(C)参考解答:令简谐振动的表达式:)cos(ϕω+=t A x ,)(ϕω+t 称为振动系统在t 时刻的位相。

振动、波动练习题及答案振动、波动练习题⼀.选择题1.⼀质点在X 轴上作简谐振动,振幅A=4cm。
周期T=2s。
其平衡位置取作坐标原点。
若t=0 时刻质点第⼀次通过x= -2cm 处,且向X 轴负⽅向运动,则质点第⼆次通过x= -2cm 处的时刻为()。
A 1sB 2sC 4sD 2s332.⼀圆频率为ω的简谐波沿X 轴的正⽅向传播,t=0 时刻的波形如图所⽰,则t=0 的波形t=0 时刻,X 轴上各点的振动速度υ与X轴上坐标的关系图应()3.图⽰⼀简谐波在 t=0 时刻的波形图,波速υ =200m/s ,则图中O 点的振动加速度的表达式为()2A a 0.4 2 cos( t ) 2 23B a 0.4 2 cos( t )22C a 0.4 2cos(2 t ) 4.频率为 100Hz ,传播速度为 300m/s 的平⾯简谐波,波线上两点振动的相位差为 3 ,则这两点相距()A 2mB 2.19mC 0.5mD 28.6m5.⼀平⾯简谐波在弹性媒质中传播,媒质质元从平衡位置运动到最⼤位置处的过程中,()。
A 它的动能转换成势能它的势能转换成动C 它从相邻的⼀段质元获得能量其能量逐渐增⼤Da20.4 2 cos(2 t2)υ (m/s)Bυ (m/s)DX(m)D 它把⾃⼰的能量传给相邻的⼀段质元,其能量逐渐减⼩6.在下⾯⼏种说法中,正确的说法是:()。
A 波源不动时,波源的振动周期与波动的周期在数值上是不同的B 波源振动的速度与波速相同C 在波传播⽅向上的任⼀质点振动位相总是⽐波源的位相滞后D 在波传播⽅向上的任⼀质点振动位相总是⽐波源的位相超前7.⼀质点作简谐振动,周期为T,当它由平衡位置向X 轴正⽅向运动时,从⼆分之⼀最⼤位移处到最⼤位移处这段路程所需要的时间为()。
A TBTCTDT4 12 6 88.在波长为λ的驻波中两个相邻波节之间的距离为()。
A λB 3 λ/4C λ/2D λ /49.在同⼀媒质中两列相⼲的平⾯简谐波的强度之⽐I1I 4是,则两列波的振幅之⽐是:()A A1 4 B1 2 CA1 16 DA11A2 A2 A2 A2 410.有⼆个弹簧振⼦系统,都在作振幅相同的简谐振动,⼆个轻质弹簧的劲度系数K 相同,但振⼦的质量不同。
第四章 振动和波习题解答1.一振动的质点沿x 轴作简谐振动,其振幅为5.0×10-2m ,频率2.0Hz ,在时间t =0时,经平衡位置处向x 轴正方向运动,求运动方程。
如该质点在t =0时,经平衡位置处向x 轴负方向运动,求运动方程。
解:已知25.010m A -=⨯,ν=时>02.0Hz,=0t v 。
通解方程式为πϕπϕ--=⨯⨯⨯+=⨯+22005.010cos(22) 5.010cos(4)x t t 由t =0时x =0 有πϕϕ==±00cos 0,2 速度表达式为ππϕ-==-⨯⨯+20d 4 5.010sin(4)d x v t t根据已给条件时>0=0t v 有ϕ<0sin 0,考虑ππϕϕ=±=-00,22。
∴运动方程为ππ-=⨯-25.010cos(4)m 2x t2.质量为 5.0×10-3kg 的振子作简谐振动,其运动方程为)π325c o s (100.62+⨯=-t x 式中,x 中的单位是m ,t 的单位是s 。
试求:(a)角频率、频率、周期和振幅;(b)t =0时的位移、速度、加速度和所受的力;(c)t =0时的动能和势能。
解:(a)根据已给条件rad 5=ωωππωνππω=====5225,,225T ,-=⨯26.010m A 。
(b) 将条件t =0带入方程s /m 1035.0100.6)32cos(22--⨯-=⨯⨯-==πA x s /m 26.032sin 5100.6)32sin(d d 2-=⨯⨯⨯-=+-==-ππωωt A t x v s /m 75.032cos 55100.6)32cos(d d 22-=⨯⨯⨯⨯-=+-==-ππωωt A t v a (c) 动能J m E p 5210169.021-⨯==v 势能J mx kx E k 422210625.52121-⨯===ω3.一轻弹簧受29.43N 的作用力时,伸长为9.0×10-2m,今在弹簧下端悬一重量P =24.5N 的重物,求此这重物的振动周期。

第四章两自由度系统的振动当振动系统需要两个独立坐标描述其运动时,称为两自由度振动系统。
两自由度系统是最简单的多自由度系统,因此研究两自由度系统是分析和掌握多自由度系统的基础。
两自由度系统具有两个固有频率,两自由度系统以固有频率进行的振动与单自由度系统不同,它以固有频率进行的振动是指整个系统在运动过程中莫一位移形状,称为固有振型,因此两自由度具有两个与固有频率对应的两个固有振型。
在任意初始条件下的自由振动响应一般由两个固有振型的叠加得到。
受迫简谐振动的频率与激励频率相同。
两自由度系统的振动微分方程一般由两个联立的微分方程组成。
如果恰当地选取坐标,可使两个微分方程解除耦合,这种坐标称为主坐标或固有坐标。
用固有坐标建立的系统振动微分方程为两个独立的单自由度系统的微分方程。
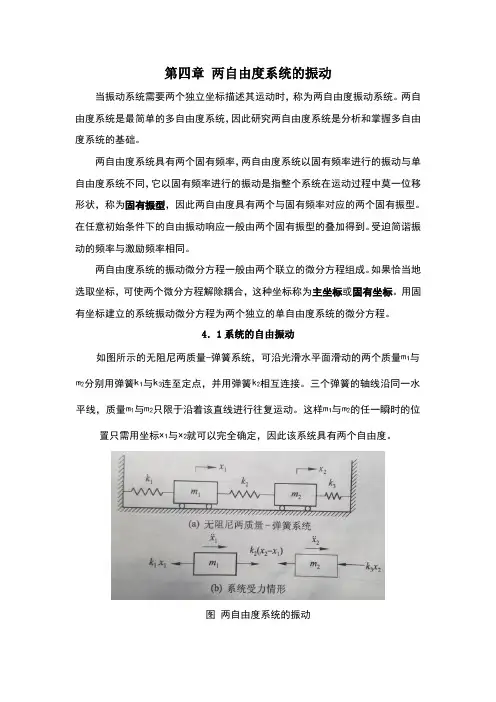
4.1系统的自由振动如图所示的无阻尼两质量-弹簧系统,可沿光滑水平面滑动的两个质量与分别用弹簧与连至定点,并用弹簧相互连接。
三个弹簧的轴线沿同一水平线,质量与只限于沿着该直线进行往复运动。
这样与的任一瞬时的位置只需用坐标与就可以完全确定,因此该系统具有两个自由度。
图两自由度系统的振动取与的静平衡位置为坐标原点。
在振动过程中任一瞬时t,与的位置分别为与,作用于与的重力于光滑水平面的法向反力相平衡,在质量的水平方向作用有弹性恢复力和,质量的水平方向则受到和作用,方向如图所示。
取加速度和力的正方向与坐标正方向一致,根据牛顿运动定律有移项得方程()就是图所示的两自由度系统自由振动的微分方程,为二阶常系数线性齐次常微分方程组。
方程()可以使用矩阵形式来表示,写成由系数矩阵组成的常数矩阵m和k分别称为质量矩阵和刚度矩阵,向量x 称为位移向量。
因此设分别为刚度矩阵k中的元素,因而方程()可以写成方程()为系统自由振动的微分方程。
方程()是齐次的,如果和位方程()的一个解,那么与其相差一个因子的和也将是一个解。
通常感兴趣的是一种特殊形式的解,也就是和同步运动的解。
第4章振动(zhèndòng)一、选择题1(C),2(B),3(C),4(E),5(C),6(D),7(B),8(D),9(B),10(C)二、填空题(1). π、- π /2分、π/3.(2). 、(3).(4).(5).(6). 0.05 m,-0.205π(或-36.9°)(7). 3/4,(8). 291 Hz或309 Hz(9). 4×10-2 m,(10). 4:3三、计算题1.如图1所示,一定滑轮的半径(bànjìng)为R,转动惯量为J,其上挂一轻绳,绳的一端(yīduān)系一质量为m的物体,另一端与一固定(gùdìng)的轻弹簧相连,如图所示.设弹簧的劲度系数为k,绳与滑轮间无滑动(huádòng),且忽略轴的摩擦力及空气阻力.现将物体m从平衡位置拉下一微小距离后放手,证明物体作简谐振动,并求出其角频率.解:取如图x坐标,平衡位置为原点O,向下为正,m在平衡位置时弹簧已伸长x0①设m在x位置,分析受力, 这时弹簧伸长②由牛顿第二定律和转动定律列方程:③④⑤联立解得由于x系数为一负常数,故物体做简谐振动,其角频率为2.在直立(zhí lì)的U形管中装有质量(zhìliàng)为m = 240 g的水银(shuǐyín)(密度为ρ = 13.6 g/cm3),管的截面积为S = 0.30 cm2.经初始扰动后,水银在管内作微小振动.不计各种阻力(zǔlì).试列出振动微分方程,并求出振动周期.解:建立竖直坐标如图,令微小振动(zhèndòng)中,两臂水银面相平时,水银面坐标为0,水银的重力势能为0,则以右臂水银面的坐标为准,在振动中任一时刻,水银的运动速度.这时振动中水银的动能为,水银的势能(看作两水银面相平的状态下,从左臂移高度为x的一段水银柱到右臂,则有质量为Sρx的水银升高了高度x)为Sρgx2.因振动中机械能守恒常量对t求导数可得化简这就是简谐振动的微分方程.由此可得振动角频率振动周期 s3.质量m = 10g 的小球与轻弹簧组成的振动系统,按的规律作自由振动,式中t以秒作单位,x以厘米为单位,求(1) 振动的角频率、周期、振幅和初相;(2) 振动的速度、加速度的数值表达式;(3) 振动的能量E;(4) 平均动能和平均势能.解:(1) A = 0.5 cm;ω = 8π s-1;T = 2π/ω = (1/4) s;φ = π/3(2) (SI)(SI)(3) =7.90×10-5 J(4) 平均动能= 3.95×10-5 J =同理= 3.95×10-5 J4.一质量(zhìliàng)m = 0.25 kg的物体,在弹簧(tánhuáng)的力作用下沿x轴运动(yùndòng),平衡位置在原点. 弹簧(tánhuáng)的劲度系数k = 25 N·m-1.(1) 求振动(zhèndòng)的周期T和角频率ω.(2) 如果振幅A =15 cm,t = 0时物体位于x = 7.5 cm处,且物体沿x轴反向运动,求初速v0及初相φ.(3) 写出振动的数值表达式.解:(1)s(2) A = 15 cm,在t = 0时,x0 = 7.5 cm,v0 < 0由得 m/s或 4π/3∵x0 > 0 ,∴(3) (SI)5.如图5所示,有一水平弹簧振子,弹簧的劲度系数k =24 N/m,重物的质量m = 6 kg,重物静止在平衡位置上.设以一水平恒力F = 10 N 向左作用于物体(不计摩擦),使之由平衡位置向左运动了0.05 m时撤去力F.当重物运动到左方最远位置时开始计时,求物体的运动方程.解:设物体的运动方程为.恒外力所做的功即为弹簧振子的能量:F×0.05 = 0.5 J.当物体运动到左方最远位置时,弹簧的最大弹性势能为0.5 J,即:J,∴A = 0.204 m.A即振幅.(rad/s)2ω = 2 rad/s.按题目(tímù)所述时刻计时,初相为φ = π.∴物体运动(yùndòng)方程为 (SI).四研讨(yántǎo)题1. 简谐振动的初相是不是一定指它开始(kāishǐ)振动时刻的位相?参考(cānkǎo)解答:对于一个振幅和周期已定的简谐振动,用数学公式表示时,由于选作原点的时刻不同,值就不同。