第3章 飞行操纵系统
- 格式:ppt
- 大小:5.20 MB
- 文档页数:116
飞行操纵系统摘要:飞行操纵系统是保障民航飞机在天空安全可靠飞行的重要系统。
它是飞机上所有用来传递操纵指令,驱动舵面运动的所有部件和装置的总和,用于控制飞机的飞行姿态、气动外形和乘坐品质。
波音737NG作为典型的液压助力机械式主操作系统,对其研究具有重要意义。
因此,本文将结合波音737NG对飞机的主操纵系统和辅助操纵系统做主要介绍。
正文:飞行操纵系统分类很多,根据操纵信号的来源不同可分为人工飞行操纵系统和自动飞行操纵系统。
自动飞行操纵系统操纵信号由系统本身产生,而人工飞行操纵系统操纵信号由驾驶员产生。
在人工操纵系统中,通常又分为主操纵系统和辅助操纵系统。
主操纵系统指驱动副翼、升降舵和方向舵,使飞机产生绕纵轴、横轴、立轴转动的系统。
其他驱动扰流板、前缘装置、后缘襟翼和水平安定面配平等辅助操纵面的操纵系统均称为辅助操纵系统。
一、飞行主操作系统1、副翼飞机副翼通常铰接在机翼外侧后缘,在大型飞机的组合横向操纵系统中,通常有4块副翼----2块内副翼和2块外副翼。
低速飞行时,内外副翼可以共同进行横向操作;高速飞行时,仅有内副翼进行横向操作。
副翼系统操纵飞机绕纵轴进行滚转运动,运动期间,一侧机翼的副翼上偏,另一侧机翼的副翼下偏,两侧机翼产生升力差,飞机完成滚转。
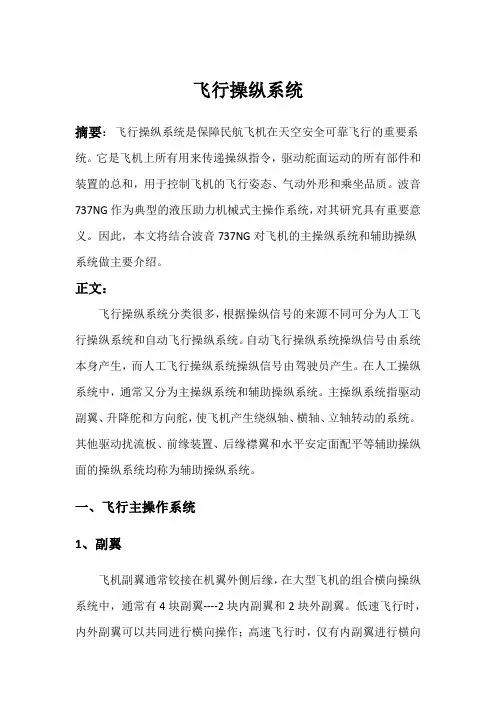
图一典型副翼操纵系统原理如图所示为737NG飞机的副翼操纵系统,采用并列驾驶盘式操纵机构,两驾驶盘通过互联鼓轮柔性相连。
当转动任意驾驶盘产生操纵信号都可以按如下路径向后传递:驾驶盘、左侧副翼鼓轮、钢索、副翼输入扇形轮、副翼输入扭力管、输入摇臂和输入杆、液压助力器、输出摇臂和输出扭力管、输出鼓轮、钢索、扇形轮、传动杆、副翼。
其中关键部件为驾驶盘柔性互联机构、液压助力器与副翼感觉定中机构。
驾驶盘柔性互联机构用于防止驾驶盘卡阻。
正常情况下,操纵一侧驾驶盘,另一侧随动。
当右侧驾驶盘卡阻,左侧机长可以操纵左驾驶盘通过左钢索系统操纵副翼;当左驾驶盘卡阻时,副驾驶可以使用右驾驶盘操纵扰流板进行应急横滚操作。
第三章 直升机的增稳与控制增稳系统直升机作为控制对象与固定翼飞机相比有更复杂的动力学。
除了应考虑机体的六自由度运动以外,还必需考虑旋翼及尾桨相对于机身的旋转,以及桨叶相对于挥舞铰的运动。
这些决定了直升机具有较差的稳定性与操纵性。
早期的直升机由于执行任务比较简单,性能要求也比较低,直升机的不稳定运动模态发散周期比较长,驾驶员可以对这种不稳定的发散模态进行不断的人工修正。
随着直升机性能不断提高,以及执行的任务越来越复杂,特别是武装直升机不仅要执行反潜,对地攻击,对空射击,而且要完成超低空贴地飞行,进行地形跟随与地形回避机动,还需要抵御阵风扰动等,再加上直升机固有的不稳定性,仅依靠人工操纵已十分困难,所以与固定翼飞机相比,更需采用增稳系统(SAS )、控制增稳系统(CSAS )或自动飞行控制系统(AFCS ),并不断引入主动控制技术,向着电传操纵(FBW )及光传操纵方向发展。
本章将论述在人工操纵状态下的各工作通道的增稳及控制增稳系统基本工作原理、典型结构及设计方法。
为便于论述工作原理、便于设计和仿真,本章首先构建了以结构图形式给出的直升机四通道线性动力学模型。
3.1 直升机结构图形式的数学模型为了便于分析增稳系统基本工作原理,需理解直升机动力学方程各气动导数物理含义,列出不计纵侧向之间气动耦合的如下纵向和侧向线性化增量运动动力学方程,其中纵向运动可由式(2-56),(2-57)导出u u u u u ue c u w q e c uX u X w X X q X X θδδθδδ∆=∆+∆+∆-∆+∆+∆ (3-1) w w w w w we c u w q e c w Z u Z w Z Z q Z Z θδδθδδ∆=∆+∆+∆-∆+∆+∆ (3-2) q q q q q q e c u w q e c q M u M w M M q M M θδδθδδ∆=∆+∆+∆-∆+∆+∆ (3-3)由式(2-58),(2-59),(2-60)可导出侧向运动方程v v v v v v v a r v p r a r vY v Y Y Y p Y r Y Y φψδδφψδδ∆=∆+∆+∆-∆-∆+∆+∆ (3-4) p p p p p p p a r v p r a r p L v L L L p L r L L φψδδφψδδ∆=∆+∆+∆-∆-∆+∆+∆ (3-5) r r r r r r r a r v p r a r r N v N N N p N r N N φψδδφψδδ∆=∆+∆+∆-∆-∆+∆+∆ (3-6)上述6个方程的物理含义十分清楚,方程(3-1)、(3-2)、(3-4)是力的方程。