计算机控制系统 _课后答案全解讲诉
- 格式:doc
- 大小:11.31 MB
- 文档页数:107

1-1 什么是计算机控制系统?画出一个实际计算机控制系统原理结构图,并说明一个计算机控制系统由哪些部分组成及各部分的作用。
利用计算机参与控制的系统称为计算机控制系统。
1-2 简述计算机控制系统的控制过程。
实时数据采样实时计算控制量实时控制实时管理1-3 实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:生产过程和计算机系统直接连接,并接受计算机直接控制的方式称为在线或联机方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制的方式叫做“脱机”方式或“离线”方式。
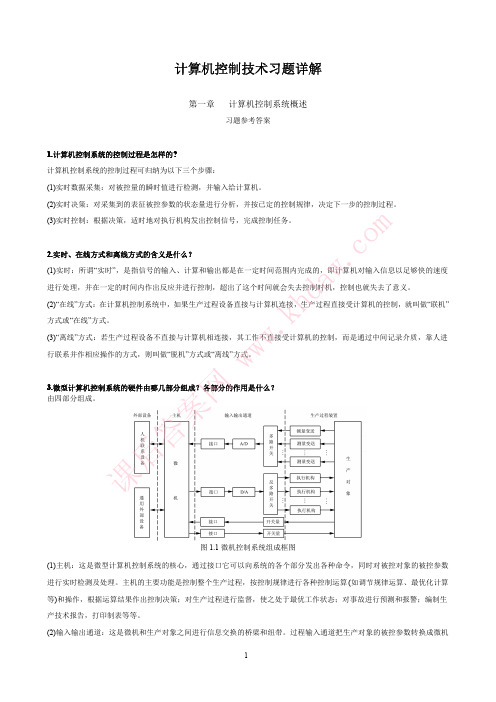
1-4 计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
(4)生产过程装置a.测量变送单元:为了测量各种参数而采用的相应检测元件及变送器。
b.执行机构:要控制生产过程,必须有执行机构。
1.5 计算机控制系统的软件由哪几部分组成?各部分的作用是什么?就功能来分,软件可分为系统软件、应用软件及数据库。
系统软件:它是由计算机设计者提供的专门用来使用和管理计算机的程序。
系统软件包括:a.操作系统:即为管理程序、磁盘操作系统程序、监控程序等;b.诊断系统:指的是调节程序及故障诊断程序;c.开发系统:包括各种程序设计语言、语言处理程序(编译程序)、服务程序(装配程序和编辑程序)、模拟主系统(系统模拟、仿真、移植软件)、数据管理系统等;d.信息处理:指文字翻译、企业管理等。

计算机控制系统课后答案1. 介绍本文是针对计算机控制系统课后作业的答案汇总。
在课程中涉及到的问题和概念将会一一解答和说明,帮助读者更好地理解和掌握计算机控制系统。
2. 问题解答2.1 列举计算机控制系统的应用领域。
计算机控制系统广泛应用于以下领域:- 工业自动化控制:用于控制工业生产线上的各种设备和工艺过程。
- 交通运输系统:包括地铁、公交、航空、航天等领域的运输工具的控制。
- 农业自动化:应用于农业机械和设备的控制,提高农业生产效率。
- 医疗设备控制:用于医疗设备的自动控制和监测。
- 建筑智能化:用于建筑内部的照明、供暖、空调等控制系统。
- 安防、监控系统:包括视频监控、入侵报警等各种安全系统的控制。
2.2 计算机控制系统的组成结构是什么?计算机控制系统的基本组成结构包括: - 传感器:用于将被控制对象的状态转换为电信号,并输入到控制系统中。
- 执行器:根据控制系统的指令,执行相应的动作,控制被控制对象。
- 控制器:对传感器采集到的数据进行处理和分析,并产生相应的控制指令。
- 通信网络:用于传输控制指令和传感器数据的通信网络。
- 计算机:负责控制器的运行和算法的执行,对控制系统进行监控和管理。
2.3 什么是开环控制系统和闭环控制系统?它们的区别是什么?开环控制系统是指控制器只根据预先设置的控制指令,对被控制对象进行控制,而不对被控制对象的输出进行测量和反馈。
因此,开环控制系统的控制效果受到外界扰动和被控制对象本身性能变化的影响。
闭环控制系统是指控制器在对被控制对象进行控制的同时,通过测量被控制对象的输出信号,并与设定值进行比较,产生反馈信号进行控制调节。
闭环控制系统能够根据被控制对象实际输出的变化来调整控制指令,使控制效果更加稳定和准确。
区别: - 开环控制系统没有反馈环路,只根据预先设置的控制指令对被控制对象进行控制;闭环控制系统设有反馈环路,通过测量被控制对象的输出进行调节。

第一章1、计算机控制系统是由哪几部分组成的?画出方框图并说明各部分的作用。
答:计算机控制系统由工业控制机、过程输入输出设备和生产过程三部分组成;框图P3。
1)工业控制机主要用于工业过程测量、控制、数据采集、DCS操作员站等方面。
2)PIO设备是计算机与生产过程之间的信息传递通道,在两者之间起到纽带和桥梁的作用。
3)生产过程就是整个系统工作的各种对象和各个环节之间的工作连接。
2、计算机控制系统中的实时性、在线方式与离线方式的含义是什么?为什么在计算机控制系统中要考虑实时性?(1)实时性是指工业控制计算机系统应该具有的能够在限定时间内对外来事件做出反应的特性;在线方式是生产过程和计算机直接相连,并受计算机控制的方式;离线方式是生产过程不和计算机相连,并不受计算机控制,而是靠人进行联系并作相应操作的方式。
(2)实时性一般要求计算机具有多任务处理能力,以便将测控任务分解成若干并行执行的多个任务,加快程序执行速度;在一定的周期时间对所有事件进行巡查扫描的同时,可以随时响应事件的中断请求。
3.计算机控制系统有哪几种典型形式?各有什么主要特点?(1)操作指导控制系统(OIS)优点:结构简单、控制灵活和安全。
缺点:由人工控制,速度受到限制,不能控制对象。
(2)直接数字控制系统(DDC) (属于计算机闭环控制系统)优点:实时性好、可靠性高和适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最有工况。
(4)集散控制系统优点:分散控制、集中操作、分级管理、分而自治和综合协调。
(5)现场总线控制系统优点:与DOS相比降低了成本,提高了可靠性。
(6)PLC+上位系统优点:通过预先编制控制程序实现顺序控制,用PLC代替电器逻辑,提高了控制是现代灵活性、功能及可靠性。
附加:计算机控制系统的发展趋势是什么?大规模及超大规模集成电路的发展,提高了计算机的可靠性和性能价格比,从而使计算机控制系统的应用也越来越广泛。
为更好地适应生产力的发展,扩大生产规模,以满足对计算机控制系统提出的越来越高的要求,目前计算机控制系统的发展趋势有以下几个方面。

计算机控制系统课后答案问题1:什么是计算机控制系统?计算机控制系统是指利用计算机技术对物理过程或机械设备进行监控、控制和管理的系统。
它由计算机硬件、软件和工程配套设备等多个组成部分构成。
计算机控制系统具有实时性好、反应速度快、准确性高等特点,广泛应用于各种工业自动化领域。
问题2:计算机控制系统的组成部分有哪些?计算机控制系统由以下几个部分组成:1.传感器和执行器:传感器用于感知物理过程的状态和参数,并将其转换为电信号,以便计算机能够处理。
执行器根据计算机的指令来执行控制动作,控制物理过程或机械设备的运行。
2.计算机硬件:包括中央处理器(CPU)、内存、输入输出接口等。
计算机硬件负责接收传感器采集的数据,并根据预设的算法进行处理和判断,进而控制执行器的动作。
3.计算机软件:包括控制算法、界面程序等。
控制算法根据输入的传感器数据进行计算和判断,生成相应的控制指令。
界面程序提供控制系统的人机交互界面,使操作员能够对系统进行监控和控制。
4.工程配套设备:包括可编程逻辑控制器(PLC)、仪表仪器等。
这些设备与计算机系统相连,作为中间装置,用于完成不同领域的控制任务。
问题3:计算机控制系统的工作原理是什么?计算机控制系统的工作原理是通过传感器采集物理过程的状态和参数,将其转换为电信号输入到计算机系统中。
计算机根据预设的控制算法,对输入的数据进行处理和判断,生成相应的控制指令。
这些控制指令通过输出接口发送给执行器,执行器根据指令来执行相应的控制动作,从而实现对物理过程或机械设备的控制。
计算机的工作过程可以理解为以下几个步骤:1.信号采集:传感器采集物理过程的状态和参数,并将其转换为电信号。
2.信号处理:计算机系统接收传感器的电信号,对其进行滤波、放大、数字量化等处理,以获取准确的数据。
3.控制计算:根据输入的数据,计算机系统进行控制算法的计算和判断,生成相应的控制指令。
4.控制输出:控制指令通过输出接口发送给执行器,执行器根据指令来执行相应的控制动作。

习题一1,微型计算机控制系统的硬件由哪几局部组成?各局部的作用是什么?答:CPU,接口电路与外部设备组成。
CPU,这是微型计算机控制系统的核心,通过接口它可以向系统的各个局部发出各种命令,同时对被控对象的被控参数进展实时检测与处理。
接口电路,微机和生产对象之间进展信息交换的桥梁和纽带。
外部设备:这是实现微机和外界进展信息交换的设备2,微型计算机控制系统软件有什么作用?说出各局部软件的作用。
答:软件是指能够完成各种功能的计算机程序的总和。
整个计算机系统的动作,都是在软件的指挥下协调进展的,因此说软件是微机系统的中枢神经。
就功能来分,软件可分为系统软件、应用软件1)系统软件:它是由计算机设计者提供的专门用来使用和管理计算机的程序。
对用户来说,系统软件只是作为开发应用软件的工具,是不需要自己设计的。
2)应用软件:它是面向用户本身的程序,即指由用户根据要解决的实际问题而编写的各种程序。
3,常用工业控制机有几种?它们各有什么用途?4,操作指导、DDC和SCC系统工作原理如何?它们之间有何区别和联系?答:(1)操作指导控制系统:在操作指导控制系统中,计算机的输出不直接作用于生产对象,属于开环控制结构。
计算机根据数学模型、控制算法对检测到的生产过程参数进展处理,计算出各控制量应有的较适宜或最优的数值,供操作员参考,这时计算机就起到了操作指导的作用。
(2)直接数字控制系统(DDC系统):DDC(Direct Digital Control)系统就是通过检测元件对一个或多个被控参数进展巡回检测,经输入通道送给微机,微机将检测结果与设定值进展比拟,再进展控制运算,然后通过输出通道控制执行机构,使系统的被控参数达到预定的要求。
DDC系统是闭环系统,是微机在工业生产过程中最普遍的一种应用形式。
(3)计算机监视控制系统(SCC系统):SCC(Supervisory puter Control)系统比DDC系统更接近生产变化的实际情况,因为在DDC系统中计算机只是代替模拟调节器进展控制,系统不能运行在最优状态,而SCC系统不仅可以进展给定值控制,并且还可以进展顺序控制、最优控制以与自适应控制等SCC是操作指导控制系统和DDC系统的综合与开展。
第1章习题B 习题B1-1 举例说明2-3个你熟悉的计算机控制系统,并说明与常规连续模拟控制系统相比的优点。
B1-2 利用计算机及接口技术的知识,提出一个用同一台计算机控制多个被控参量的分时巡回控制方案。
B1-3 题图B1-3是一典型模拟式火炮位置控制系统的原理结构图。
由雷达测出目标的高低角、方位角和斜距,信号经滤波后,由模拟式计算机计算出伺服系统高低角和方位角的控制指令,分别加到炮身的高低角和方位角伺服系统,使炮身跟踪指令信号。
为了改善系统的动态和稳态特性,高低角和方位角伺服系统各自采用了有源串联校正网络和测速反馈校正,同时利用逻辑电路实现系统工作状态的控制(如偏差过大时可断开主反馈,实现最大速度控制,当偏差小于一定值后实现精确位置控制)。
试将其改造为计算机控制系统,画出系统原理结构图。
题图B1-3典型模拟式火炮位置控制系统的原理结构图B1-4水位高度控制系统如题图B.1-4所示。
水箱水位高度指令由W1 电位计指令电压u r确定,水位实际高度h由浮子测量,并转换为电位计W2 的输出电压u h。
用水量Q1 为系统干扰。
当指令高度给定后,系统保持给定水位,如打开放水管路后,水位下降,系统将控制电机,打开进水阀门,向水箱供水,最终保持水箱水位为指令水位。
试把该系统改造为计算机控制系统。
画出原理示意图及系统结构图。
题图B1-4 水箱水位控制系统原理示意图B1-5 题图B1-5为一机械手控制系统示意图。
将其控制器改造为计算机实现,试画出系统示意图及控制系统结构图。
题图B1-5机械手控制系统示意图B1-6题图B1-6为仓库大门自动控制系统示意图。
试将其改造为计算机控制系统,画出系统示意图。
题图B1-6 仓库大门自动控制系统示意图B1-7车床进给伺服系统示意图如题图B1-7所示。
电动机通过齿轮减速机构带动丝杠转动,进而使工作台面实现直线运动。
该系统为了改善系统性能,利用测速电机实现测速反馈。
试将该系统改造为计算机控制系统,画出系统示意图。
第一章1.1 计算机控制系统是怎么样分类的?按功能和控制规律可各分几类?答:计算机控制系统可按功能分类,按控制规律分类和按控制方式分类。
按功能计算机控制系统的分类:(1)数据处理系统。
(2)直接数字控制(简记为DDC)。
(3)监督控制(简记为SCC)。
(4)分级控制。
(5)集散控制。
(6)计算机控制网络。
按照控制规律计算机控制系统的分类:(1)程序和顺序控制。
(2)比例积分微分控制(简称PID控制)。
(3)有限拍控制。
(4)复杂规律控制。
(5)智能控制。
1.2 计算机控制系统由哪些部分组成?并画出方框图。
答:计算机控制系统由控制对象、执行器、测量环节、数字调节器及输入输出通道等组成。
方框图:P115 图1.21 输出反馈计算机控制系统1.9 简述采样定理及其含义。
答:采样定理:如果采样角频率=2/T大于2,即≥2,则采样的离散信号(t)能够不失真地恢复原来的连续信号y(t)。
式中是连续信号y(t)的频谱特性中的最高角频率。
含义:要使采样信号(t)能够不失真地恢复原来的连续信号y(t),必须正确选择采样角频率,使≥1.10 多路巡回检测时,采样时间,采样周期T和通道数N之间的关系。
答:采样时间是足够短的时间,y(kT)y(kT+),0<<。
应满足 T≥N。
1.12 设有模拟信号(0~5)V和(2.5~5)V,分别用8位、10位和12位A/D转换器,试计算并列出各自的量化单位和量化误差。
答:量化单位q=,量化误差量化误差(2.5)V量化误差1.14 试述数模转换器的作用?如何选择转换器的位数?答:数模转换器把数字量u(kT)转换成离散的模拟量(t)。
转换的精度取决模-数转换器的位数n,当位数足够多时,转换可以达到足够高的精度。
1.19 计算机控制系统有哪些主要的性能指标?如何衡量?答:计算机控制系统主要有动态指标,稳态指标和综合指标1.20 如何衡量系统的稳定性?答:用相角裕量和幅值裕量来衡量计算机控制系统的稳定程度。
《计算机控制技术》习题解答第一章1.1什么是计算机控制系统?计算机控制系统由哪几部分组成?答:计算机控制系统就是利用计算机(通常称为工业控制计算机,简称工业控制机)来实现生产过程自动控制的系统。
计算机控制系统的组成:计算机控制系统由计算机(工业控制机)和生产过程两大部分组成。
1.2、微型计算机控制系统的特点是什么?微机控制系统与常规的自动控制系统相比,具有如下特点:a.控制规律灵活多样,改动方便b.控制精度高,抑制扰动能力强,能实现最优控制c.能够实现数据统计和工况显示,控制效率高d.控制与管理一体化,进一步提高自动化程度1.3 计算机控制系统结构有哪些分类?指出这些分类的结构特点和主要应用场合。
答:(1)操作指导控制系统优点:结构简单,控制灵活,安全。
缺点:由人工操作,速度受到限制,不能控制多个对象。
(2)直接数字控制系统(DDS)优点:实时性好,可靠性高,适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最优工况。
(4)分散控制系统(DCS)优点:分散控制、集中操作、分级管理、分而自治和综合协调。
(5)现场总线控制系统(FCS)优点:与DCS相比,降低了成本,提高了可靠性。
国际标准统一后,可实现真正的开放式互联系统结构。
1.4.计算机控制系统的控制过程是怎样的?计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
1.5.实时、在线方式和离线方式的含义是什么?答:所谓实时,是指信号的输入、计算和输出都要在一定的时间范围内完成,亦即计算机对输入信息,以足够快的速度进行控制,超出了这个时间,就失去了控制的时机,控制也就失去了意义。
在计算机控制系统中,生产过程和计算机直接连接,并受计算机控制的方式称为在线方式或联机方式;生产过程不和计算机相连,且不受计算机控制,而是靠人进行联系并做相应操作的方式称为离线方式或脱机方式。
第1章习题B 习题B1-1 举例说明2-3个你熟悉的计算机控制系统,并说明与常规连续模拟控制系统相比的优点。
B1-2 利用计算机及接口技术的知识,提出一个用同一台计算机控制多个被控参量的分时巡回控制方案。
B1-3 题图B1-3是一典型模拟式火炮位置控制系统的原理结构图。
由雷达测出目标的高低角、方位角和斜距,信号经滤波后,由模拟式计算机计算出伺服系统高低角和方位角的控制指令,分别加到炮身的高低角和方位角伺服系统,使炮身跟踪指令信号。
为了改善系统的动态和稳态特性,高低角和方位角伺服系统各自采用了有源串联校正网络和测速反馈校正,同时利用逻辑电路实现系统工作状态的控制(如偏差过大时可断开主反馈,实现最大速度控制,当偏差小于一定值后实现精确位置控制)。
试将其改造为计算机控制系统,画出系统原理结构图。
题图B1-3典型模拟式火炮位置控制系统的原理结构图B1-4水位高度控制系统如题图B.1-4所示。
水箱水位高度指令由W1 电位计指令电压u r确定,水位实际高度h由浮子测量,并转换为电位计W2 的输出电压u h。
用水量Q1 为系统干扰。
当指令高度给定后,系统保持给定水位,如打开放水管路后,水位下降,系统将控制电机,打开进水阀门,向水箱供水,最终保持水箱水位为指令水位。
试把该系统改造为计算机控制系统。
画出原理示意图及系统结构图。
题图B1-4 水箱水位控制系统原理示意图B1-5 题图B1-5为一机械手控制系统示意图。
将其控制器改造为计算机实现,试画出系统示意图及控制系统结构图。
题图B1-5机械手控制系统示意图B1-6题图B1-6为仓库大门自动控制系统示意图。
试将其改造为计算机控制系统,画出系统示意图。
题图B1-6 仓库大门自动控制系统示意图B1-7车床进给伺服系统示意图如题图B1-7所示。
电动机通过齿轮减速机构带动丝杠转动,进而使工作台面实现直线运动。
该系统为了改善系统性能,利用测速电机实现测速反馈。
试将该系统改造为计算机控制系统,画出系统示意图。
题图B1-7车床进给伺服系统示意图B1-8 现代飞机普遍采用数字式自动驾驶仪稳定飞机的俯仰角、滚转角和航向角。
连续模拟式控制系统结构示意图如题图B1-8所示。
图中所有传感器、舵机及指令信号均为连续模拟信号。
试把该系统改造为计算机控制系统,画出系统结构图。
副翼舵机滚转角控制器滚转角指令升降舵机俯仰角控制器俯仰角传感器滚转角传感器航向角控制器方向舵机航向角传感器俯仰角指令航向角指令题图B1-8 飞机连续模拟式姿态角控制系统结构示意图第2章 习 题A 习题(具有题解)A 2-1 下述信号被理想采样开关采样,采样周期为T ,试写出采样信号的表达式。
1)()1()f t t = 2)()e at f t t -= 3)()e sin()at f t t ω-=解:1) *0()1()()k f t kT t kT δ∞==-∑;2) *()()()akT k f t kT e t kT δ∞-==-∑;3) *()sin()()akT k f t e kT t kT ωδ∞-==-∑A 2-2 已知f (t ) 的拉氏变换式F (s ) ,试求采样信号的拉氏变换式F * (s )(写成闭合形式) 。
11)()(1)F s s s =+ 12)()(1)(2)F s s s =++解:1) 首先进行拉氏反变换,得()1e t f t -=-;*(1)00()()e(1e)eee kTskTkTskTskT s k k k k F s f kT ∞∞∞∞-----+======-=-∑∑∑∑因为201e 1e e 1ekTs Ts Ts Tsk ∞----==+++⋅⋅⋅⋅⋅=-∑, 1Ts e -<,(依等比级数公式) 类似,(1)(1)01e 1ek s T s Tk ∞-+-+==-∑,(1)e 1T s -+<,所以有*(1)11()1e 1eTs T s F s --+=--- A 2-3 试分别画出10()5e t f t -=及其采样信号*()f t 的幅频曲线(设采样周期T =0.1s)。
解:连续函数10()5e t f t -=的频率特性函数为:5(j )10j F ωω=+。
连续幅频曲线可以用如下MATLAB 程序绘图: step=0.1; Wmax=100; w2=-Wmax;y2=5*abs(1/(10+w2*i)); W=[w2]; Y=[y2]; for w=-Wmax:step:Wmax y=5*abs(1/(10+w*i)); W=[W,w]; Y=[Y ,y]; endplot(W,Y); axis([-Wmax Wmax 0 0.6]) grid结果如题图A 2-3-1所示。
题图A 2-3-1该函数的采样信号幅频谱数学表达式为*s 1(j )(j j )n F F n T ωωω∞=-∞=+∑*s s 1(j )(j j )n F F n T ωωω∞=-∞≈+∑1(j j )Ns n NF n T ωω=-≈+∑显然,采用的项数N 越大,则计算得到的值越逼近于实际值。
这里采用9N =来进行计算。
采样幅频曲线可以用如下MATLAB 程序绘图:T=0.1; %采样周期ws=2*pi/T; %采样频率num=50; %每个采样周期的计算点数step=ws/num; %计算步长Wmax=150; %画图显示的频率范围GW=4*Wmax; %计算的频率范围g0=(1/T)*5*abs(1/(1+10*GW*i)); G00=[g0];g0=(1/T)*5*abs(1/(10+(GW+ws)*i)); G11=[g0];g0=(1/T)*5*abs(1/(10+(GW-ws)*i)); G12=[g0];g0=(1/T)*5*abs(1/(10+(GW+2*ws)*i)); G21=[g0]; g0=(1/T)*5*abs(1/(10+(GW-2*ws)*i)); G22=[g0]; g0=(1/T)*5*abs(1/(10+(GW+3*ws)*i)); G31=[g0]; g0=(1/T)*5*abs(1/(10+(GW-3*ws)*i)); G32=[g0]; g0=(1/T)*5*abs(1/(10+(GW+4*ws)*i)); G41=[g0]; g0=(1/T)*5*abs(1/(10+(GW-4*ws)*i)); G42=[g0]; g0=(1/T)*5*abs(1/(10+(GW+5*ws)*i)); G51=[g0]; g0=(1/T)*5*abs(1/(10+(GW-5*ws)*i)); G52=[g0]; g0=(1/T)*5*abs(1/(10+(GW+6*ws)*i)); G61=[g0]; g0=(1/T)*5*abs(1/(10+(GW-6*ws)*i)); G62=[g0]; g0=(1/T)*5*abs(1/(10+(GW+7*ws)*i)); G71=[g0]; g0=(1/T)*5*abs(1/(10+(GW-7*ws)*i)); G72=[g0]; g0=(1/T)*5*abs(1/(10+(GW+8*ws)*i)); G81=[g0]; g0=(1/T)*5*abs(1/(10+(GW-8*ws)*i)); G82=[g0]; g0=(1/T)*5*abs(1/(10+(GW+9*ws)*i)); G91=[g0]; g0=(1/T)*5*abs(1/(10+(GW-9*ws)*i)); G92=[g0]; 其余类似,最后可得,结果如题图A 2-3-2所示。
题图A 2-3-2A 2-4若数字计算机的输入信号为10()5t f t e -=,试根据采样定理选择合理的采样周期T 。
设信号中的最高频率为m ω定义为m ()0.1(0)F j F ω=。
解: 5()10F s s =+;5(j )j 10F ωω=+;所以有0.150.1(0)0.0510F ⨯=== 222max 0.05(10)25ω+=由此可得 max 99.5ω= 依采样定理得:max 2199s ωω>=rad/sA 2-5 已知信号x =1cos()A t ω,试画出该信号的频谱曲线以及它通过采样器和理想滤波器以后的信号频谱。
设采样器的采样频率分别为4ω1,1.5ω1,和ω1 3种情况。
解释本题结果。
解:1cos()t ω的频谱为脉冲,如题图A 2-5-1所示。
当采样频率s 14ωω=时,采样频谱如题图A 2-5-1所示。
由于满足采样定理,通过理想滤波器后,可以不失真恢复原连续信号。
(见题图A 2-5-2)当采样频率s 11.5ωω=时,采样频谱如题图A 2-5-1所示。
由于不满足采样定理,采样频率发生折叠,当通过理想滤波器后,只保留了折叠后的低频信号,其频率为1111.50.5ωωω-=。
(见题图A 2-5-2)当采样频率s 1ωω=时,采样频谱如题图A 2-5-1所示。
由于不满足采样定理,采样频率发生折叠,折叠后的低频信号位于0ω=处,当通过理想滤波器后,只保留了折叠后的低频信号,其频率为0ω=,即直流信号。
(见题图A 2-5-2)题图A 2-5-1题图A 2-5-2A 2-6 已知信号x =1cos()A t ω,通过采样频率s 13ωω=的采样器以后。
又由零阶保持器恢复成连续信号,试画出恢复以后信号的频域和时域曲线;当s 110ωω=时,情况又如何?比较结果。
解:见题图A 2-6。
s 13ωω=题图A 2-6结果表明,当采样频率较低时,零阶保持器输出阶梯较大,高频分量较大。
A 2-7 已知信号s sin()sin(4),1,3,4,x t y t ω===和若试求各采样信号的x (kT )及y(kT),并说明由此结果所得结论。
解: ()sin()sin(2π/)s x kT kT k ω==;s ()sin(4)sin(8π/)y kT kT k ω==s s 1,()sin(2π/)sin(2π)0x kT k k ωω====;()sin(8π)0y kT k ==s 3,()sin(2π/)sin(2π/3)s x kT k k ωω===;s ()sin(4)sin(8π/)sin(8π/3)sin(2π2π/3)sin(2π/3)y kT kT k k k k k ω====+=。
s s 4,()sin(2π/)sin(2π/4)sin(π/2)x kT k k k ωω====;s ()sin(4)sin(8π/)sin(8π/4)sin(2π)y kT kT k k k ω====结果表明,不满足采样定理,高频信号将变为低频信号。
A 2-8 试证明ZOH 传递函数h 1e ()sTG s s--=中的s =0不是G h (s )的极点,而21e ()sTY s s --=中,只有一个单极点s =0。