风力发电系统建模与仿真
- 格式:doc
- 大小:820.50 KB
- 文档页数:21

基于Matlab_Simulink的永磁直驱风⼒发电机组建模和仿真研究-2发电机参数:极对数42;d 轴电抗1.704mL ;q轴电抗1.216mL ;转⼦磁通4.7442Wb ;转动惯量11258J 。
PI 参数:⽹侧电流内环d 轴(1.5、1),q 轴(0.5、37);⽹侧功率外环(0.0002、0.05);直流侧电压(2、120);机侧电流内环d 轴(-3、-24),q 轴(-3、-80);机侧功率外环(-3、-60)。
本仿真中风速由6m/s 变化到9m/s ,最后变化到12m/s 。
在最⼤风能捕获控制情况下,随着风速的变化,转⼦转速不断调整,以保持最佳叶尖速⽐,从⽽达到最⼤风能利⽤,图8为风速、转⼦转速、机械和电磁转矩变化曲线。
机侧电压电流变化如图9所⽰,在最⼤风能捕获模式下,电压和电流频率随着风速的增⼤⽽增⼤,电压幅值从260V 变化到400V 、540V ,电流幅值变化为380A 、850A 、1500A 。
电⽹侧及直流侧电压电流变化如图10所⽰,电⽹电压保持恒定,电流幅值随着风速的增⼤⽽增⼤变化范围为:168A 、580A 、1290A 。
直流侧电压在风速突变时有⼀个充电过程,电压升⾼,最⾼达到1320V ,经过⼤约0.1s的暂态过程后恢复到额定值1200V 。
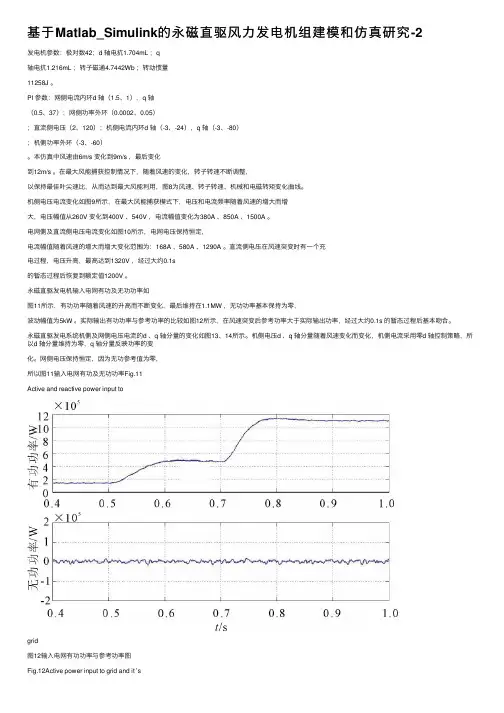
永磁直驱发电机输⼊电⽹有功及⽆功功率如图11所⽰,有功功率随着风速的升⾼⽽不断变化,最后维持在1.1MW ,⽆功功率基本保持为零,波动幅值为5kW 。
实际输出有功功率与参考功率的⽐较如图12所⽰,在风速突变后参考功率⼤于实际输出功率,经过⼤约0.1s 的暂态过程后基本吻合。
永磁直驱发电系统机侧及⽹侧电压电流的d 、q 轴分量的变化如图13、14所⽰。
机侧电压d 、q 轴分量随着风速变化⽽变化,机侧电流采⽤零d 轴控制策略,所以d 轴分量维持为零,q 轴分量反映功率的变化。
⽹侧电压保持恒定,因为⽆功参考值为零,所以图11输⼊电⽹有功及⽆功功率Fig.11Active and reactive power input togrid图12输⼊电⽹有功功率与参考功率图Fig.12Active power input to grid and it ’sreference第27卷第9期电⽹与清洁能源图10电⽹侧及直流侧电压电流变化Fig.10Variation of voltage and current of grid and DC side 图9机侧电压电流变化Fig.9Variation of generator-side voltage andcurrent图8风速、转⼦转速、转矩变化Fig.8Variation of wind speed,rotor speed andtorqueClean Energy97电流q 轴分量为零。
风力发电机组的动力学建模与控制系统设计一、引言风力发电作为清洁能源之一,受到了越来越多的关注和应用。
而风力发电机组的动力学建模与控制系统设计是风力发电技术的核心,对于提高风力发电机组的稳定性和效率至关重要。
本文将针对风力发电机组的动力学建模与控制系统设计展开讨论。
二、风力发电机组的动力学建模1. 风力发电机组的结构与工作原理风力发电机组是由风轮、风机塔、传动系统和发电机组成。
风轮通过风的作用产生转动力矩,经过传动系统传递给发电机,发电机将机械能转化为电能输出。
2. 动力学建模方法动力学建模是分析风力发电机组运动规律和响应特性的基础。
常用的动力学建模方法有质点模型、小扰动模型和时域模型等。
3. 动力学参数估计风力发电机组的动力学参数估计是建立准确模型的关键。
参数估计可以通过实验测试和模型辨识方法获得。
三、风力发电机组的控制系统设计1. 控制系统的基本要求风力发电机组的控制系统需要满足稳定性、响应性、效率和可靠性等基本要求。
在设计过程中,需要充分考虑机械部分和电气部分的特性,并结合实际的风力情况进行优化。
2. 控制策略选择常见的控制策略有PID控制、最优控制和自适应控制等。
选择合适的控制策略需要根据风力发电机组的特性和任务需求进行调整。
3. 控制器设计控制器是实现风力发电机组控制的核心部分。
控制器的设计需要考虑系统的稳定性和响应速度,并采用合适的控制算法和参数。
四、实验与仿真验证为了验证风力发电机组的动力学建模和控制系统设计的有效性,可以进行实验和仿真验证。
实验可以通过搭建实际的风力发电机组进行测试,而仿真可以借助计算机软件进行模拟和分析。
五、总结风力发电机组的动力学建模与控制系统设计是实现风力发电技术的关键步骤。
合理的动力学建模和控制系统设计可以提高风力发电机组的稳定性和效率,并最大程度地利用风能资源。
未来,在风力发电技术的不断进步和优化下,风力发电机组的动力学建模与控制系统设计将能够更好地满足人们对清洁能源的需求。
风力发电实验报告,实验一,-,副本风力发电实验报告实验一实验课题:风力机系统的建模与仿真专业:班级::姓名::学号::指导老师:成绩:1一、实验目的1.掌握Matlab的m语言编程以及仿真模型的构建方法;2.掌握利用Matlab软件构建风速模型,风轮模型以及传动系统模型的方法。
二、实验要求1.了解Matlab中Simulink如何构建子系统以及m语言编程的技巧;2.通过查阅资料,搞清楚风速模型,风轮模型以及传动系统模型的实现方法三、实验内容熟悉并掌握Matlab的m语言编程以及Simulink库相关模块应用,构建风速模型,风轮模型以及传动系统模型(包括一质量块模型、二质量块模型以及三质量块模型)并进行仿真实验验证。
四、实验步骤1.启动Matlab,调用Simulink工具箱中的模块或利用m语言编程,构建风速模型,风轮模型以及传动系统模型。
2.观察各子系统输出波形,并分析结果。
五、实验结果及分析1.风速模型的建立(1)基本风wBV基本风可以由风电场测量所得的威布尔分布参数近似确定)/11(KAvwB(3-1)式中AK 表示威布尔分布尺度参数和形状参数;)(伽马函数。
在实际与仿真时我们近似认为wBV是一个不随时间变化的分量,也就是取wBV 为一个常数。
(2)阵行风wGV2wGV用于表述风速的突然变化,在三个时间段内有不同的风速,阵性风变化过程如图3-2所示。
○11G0tT风速wGV0○2)(11GGGTTtT风速wGcosVV cosV表示在该时间段内风速变化具有余弦特性,其表达式为)(2cos121maxcosGGGTTtvv(3-2)式中maxGV阵行风最大的风速(m/s);t时间(s);1GT出现阵性风的时间(起动时间s);GT 阵性风的持续时间。
○31G+TGtT风速wGV0所以当Gt=T时cos0V当1GG/2t=(T+T)时cosmaxVV 当1GGt=(T+T)时cos0V图3-2阵行风随时间变化曲线图在分析风电系统对电压波动的影响时,通常用阵性风来考核较大的风速变化时的电压波动的特性。
风力发电系统建模与仿真 摘要:风力发电作为一种清洁的可再生能源利用方式,近年来在世界范围内获得
了飞速的发展。本文基于风力机发电建立模型,主要完成了以下工作: (1)基于风资源特点,建立了以风频、风速模型为基础的风力发电理论基础; (2)运用叶素理论,建立了变桨距风力机机理模型; (3)分析了变速恒频风力发电机的运行区域与变桨距控制的原理与方法,并给出了机组的仿真模型,为风力发电软件仿真奠定了基础; (4)搭建了一套基于PSCAD/EMTDC仿真软件的风力发电系统控制模型以及完整的风力发电样例系统模型,并且已初步实现风力机特性模拟功能。 关键词:风力发电;风频;风速;风力机;变桨距;建模与仿真 1 风资源及风力发电的基本原理
1.1 风资源概述 (1)风能的基本情况[1] 风的形成乃是空气流动的结果。风向和风速是两个描述风的重要参数。风向是指风吹来的方向,如果风是从东方吹来就称为东风。风速是表示风移动的速度即单位时间内空气流动所经过的距离。 风速是指某一高度连续10min所测得各瞬时风速的平均值。一般以草地上空10m高处的10min内风速的平均值为参考。风玫瑰图是一个给定地点一段时间内的风向分布图。通过它可以得知当地的主导风向。 风能的特点主要有:能量密度低、不稳定性、分布不均匀、可再生、须在有风地带、无污染、分布广泛、可分散利用、另外不须能源运输、可和其它能源相互转换等。 (2)风能资源的估算 风能的大小实际就是气流流过的动能,因此可以推导出气流在单位时间内垂直流过单位截面积的风能,即风能密度,表示如下: 35.0v (1-1)
式中, ——风能密度(2/mW),是描述一个地方风能潜力的最方便最有价值的量;
——空气密度(3/mkg); v——风速(sm/)。 由于风速是一个随机性很大的量,必须通过一段时间的观测来了解它的平均状况,一个地方风能潜力的多少要视该地常年平均风能密度的大小。因此需要求出在一段时间内的平均风能密度,这个值可以将风能密度公式对时间积分后平均来求得。有效风能密度还可根据下式求得 21)(5.03vvdvvPv
(1-2)
式中, 1v——启动风速(sm/); 2v——停机风速(sm/); )(vP——有效风速范围内的条件概率分布密度函数]2[。 平均风能密度则可用下式求得: dtvPvT)(5.0
13 (1-3)
1.2 风力发电的基本原理 风能具有一定的动能,通过风轮机将风能转化为机械能,拖动发电机发电。风力发电的原理是利用风带动风车叶片旋转,再通过增速器将旋转的速度提高来促使发电机发电的。依据目前的风车技术,大约3m/s的微风速度便可以开始发电。风力发电的原理说起来非常简单,最简单的风力发电机可由叶片和发电机两部分构成如图1-1所示。空气流动的动能作用在叶轮上,将动能转换成机械能,从而推动片叶旋转,如果将叶轮的转轴与发电机的转轴相连就会带动发电机发出电来。 1.3 风力发电的特点 风力发电具有以下特点: ① 可再生的洁净能源; ② 建设周期短,装机规模灵活,可根据资金情况决定一次装机规模,有一台资金就可以安装一台投产一台; ③ 可靠性高,把现代高科技应用于风力发电机组使其发电可靠性大大提高,中、大型风力发电机组可靠性从80年代的50%提高到了98%,高于火力发电且机组寿命可达20年; ④ 造价低,运行维护简单,实际占地面积小; ⑤ 发电方式多样化,既可并网运行,也可以和其他能源如柴油发电、太阳能发电、水利发电机组形成互补系统,还可以独立运行; ⑥ 单机容量小 2 风能及风力机系统模型的建立
2.2 风频模型 风速具有明显的随机性和间歇性。为了较精确地描述风速及其变化特性,引入风频分布的概念。风频分布就是风速的统计概率分布,是衡量风能资源分布特性的重要指标,它反映了风电场某个时段每一风速出现的概率,可以通过分析风电场实际测风的原始资料得到。 根据风电场实际测风的结果,假设风速是以小时平均,按每小时正点前十分钟测取,那么在一年之内就有N个测点,这样可得风电场实际的风频分布为:
yviiN
NF (2-1) 式中 iF——风速wiv的实际分布频率;
viN——一年内风速wiv出现的次数;
yN——一年内总的测风点数,一般有8760yN。 风电场风速符合威布尔分布: KAVKeAVAKvf1
(2-2) 式中,v为风速(sm/),•f为威布尔分布函数,A、K为威布尔尺度系数(sm/)和形状系数。 利用风电场测风的结果,对实际所得的风速数据进行统计,得出年平均风速
PV和风速频率分布iF,并采用最小逼近法,
min12yNiiiFf (2-3)
算出威布尔分布参数A、K的近似值。从而得到风速风频特性的数学模型,进而得到风电场风能资源分布和评估、风力发电机组选型和发电量的预测以及风电场并网对系统的影响分析。
2.2 风速模型
通常用四种成分的风速来模拟实际风速:基本风wbv、阵风wgv、渐变风和随机风。 (1) 基本风wbv 基本风反映了风场平均风速的变化,风力发电机向电网输送功率的大小主要由基本风决定,它的测得由风电场测风所得的威布尔分布参数近似确定。一般认为基本风在一段时间内不随时间变化,可取常数。
KAvwb11 (2-4) 图2-1 基本风随时间变化曲线图 (2) 阵风wgv 阵风为描述风速突然变化的特性,可假设在该段时间内风速具有余弦特性。
其他时间02cos12111maxGGGGGwgTTtTT
TtG
v (2-5)
式中, maxG——阵风幅值(sm/);
GT——阵风周期(s);
GT1——阵风开始时刻(s)。
图2-2 阵风随时间变化曲线图 (3) 渐变风wrv 渐变风用以描述风场稳态能量随时间缓慢变化的过程,以风速由小变大为例,渐进风可用下式模型:
RRRRRRRRRRRwrTTtTRTtTRTTTtTTtTtv
22max21max
12
1
210或 (2-6)
wbv t 式中,
maxR——渐变风的最大值;
RT1——渐变风开始时刻;RT2——渐变风结束时刻;
RT——渐变风保持时间。
图2-3 渐变风随时间变化曲线图 (4) 随机风 随机风表示风速变化的随机特性:随机噪声风速。
niiiiVwntwwwSv12
1
)cos(2
342
2
2
12iiNiVFwwFKwS
wiwi)5.0( (2-7)
式中,
iw——第i个分量的角频率;
w——随机分量的离散间距; i——在0~2间服从均匀概率密度的随机变量;
NK——地表粗糙系数,一般取0.004;
F——扰动范围(2m); ——相对高度的平均风速(sm/);
)(iVwS——风速随机分量分布谱密度(sm/2),通过对其积分便可得短期
风速数据。 (5) 合成风速 模拟实际作用在风力机上的风速为:
wnwrwgwbwvvvvv (2-8)
(6)综合风速模型
VwESWind SourceGustMean
RampNoiseVw
图2-4 综合风速模型 输入参数如下:
① 基本风:smvwb/9。
② 阵风:smv/2max,sTIG3,sTG1,数量为1。 ③ 渐变风:smv/2max,sTIR4,sTR1,数量为1.5. ④ 随机风:004.0NK,22000mF,50n。 仿真结果如下:
图2-5 综合风速模型仿真结果 在前面我们已经讨论过,风是近似的服从威布尔分布,也就是说,近似的服从正态分布。如图2-5所示,在没有外力风速的情况下,由于受随机噪声风的影响,风速的曲线波动很大,在3s和4s时分别又受到阵行风与渐变风的影响,波形也出现了相应的波动,其综合风速的最大值可达到15.96m/s。所示说,用以上的四个风的分量在一定的程度上是可以大体的描述风的波形,但在一些细节上还需要进一步修正,所以它的使用范围是有限的,只是可以用在一些要求的精确程度不高的模型的仿真。
2.3 风力机建模与分析 2.3.1 风力机能量转换过程
风力机能量转换模型的功率及转矩计算公式是根据流体力学中气流的动能计算公式,并结合贝兹理论得到的,详见资料[4]。风力机简化模型如下: