浅谈新三角高程测量法
- 格式:doc
- 大小:38.00 KB
- 文档页数:5

三角高程测量方法三角高程测量方法三角高程测量是一种常用的高程测量方法,其通过三角函数计算出两点之间的高差,从而得到目标点的高程。
三角高程测量方法具有精度高、操作简便、适用范围广等特点,广泛应用于工程测量、地形测量、城市规划等领域。
一、直接测量法直接测量法是一种简单而实用的高程测量方法。
其基本原理是利用水准仪和水准尺直接测量两点之间的高差。
在已知高程的基准点上设置水准仪,将水准尺放置在待测点上,读取水准尺上的读数,然后通过水准仪的水平视线读取水准尺上的高程。
直接测量法的优点是操作简便、精度高,适用于小范围的高程测量。
二、间接测量法间接测量法是一种通过测量角度和距离来计算高程的方法。
其基本原理是利用全站仪或测距仪测量两点之间的距离和角度,然后根据三角函数计算出两点之间的高差。
间接测量法的优点是不需要设置水准点,适用于大范围的高程测量。
但是,由于需要考虑地球曲率和大气折光等因素,间接测量法的精度相对较低。
三、水准测量法水准测量法是一种经典的几何高程测量方法。
其基本原理是利用水准仪和水准尺测量两点之间的高差。
水准仪由望远镜、水准器和基座组成,水准尺通常由玻璃钢或铝合金制成。
通过水准仪的望远镜和水准器,可以精确地读取水准尺上的读数和高程。
水准测量法的优点是精度高、操作简便,适用于各种地形的高程测量。
但是,由于需要设置多个水准点,水准测量法的劳动强度较大。
四、GPS测量法GPS测量法是一种利用全球定位系统进行高程测量的方法。
其基本原理是利用GPS接收机接收卫星信号,通过求解卫星至目标点之间的几何距离和卫星钟差等参数,计算出目标点的高程。
GPS测量法的优点是不需要设置水准点,适用于大范围的高程测量。
同时,GPS测量法的精度也较高,能够满足大多数工程测量的要求。
但是,由于信号受到建筑物、树木等遮挡物的影响,GPS测量法在城市地区的使用受到一定的限制。
综上所述,三角高程测量方法具有多种类型,每种方法都有其特点和应用范围。

三角高程测量法的基本原理与实施步骤高程测量是地理测量中的一个重要组成部分,它是确定地点在垂直方向上的高度差,从而推导出地形的起伏和变化情况。
三角高程测量法是一种常用且较为精确的高程测量方法之一,本文将介绍三角高程测量法的基本原理与实施步骤。
一、三角高程测量法的基本原理三角高程测量法基于三角形的相似性原理,它通过一个已知高度的基准点和两个相邻点之间的水平距离来计算出相邻点的高度差。
其基本原理如下:1. 角度测量:首先,我们需要测量出两个相邻点相对于基准点的水平方向的角度。
这可以通过定向测量仪等测量设备来完成。
测量精度要求高时,可以使用全站仪等高精度仪器。
2. 距离测量:在角度测量完成后,我们需要通过测距仪、测距杆等工具测量出基准点和相邻点之间的水平距离。
测距精度将直接影响测量结果的准确性。
3. 高度差计算:测量完成后,我们可以利用三角形的相似性原理,根据已知的角度和距离计算出两个相邻点的高度差。
具体计算方式是利用三角函数中的正切函数来求解高度差。
二、三角高程测量法的实施步骤实际进行三角高程测量时,我们需要按照一定的步骤来进行,以确保测量结果的准确性和可靠性。
下面是三角高程测量法的实施步骤:1. 确定基准点:首先,我们需要选择一个已知高度的基准点。
这个基准点可以是大地水准点、气象台、水坝等高程已知的地物。
在选择基准点时,需要考虑地理位置的便利性和高程的稳定性。
2. 设置测量站:在确定基准点后,我们需要设置测量站点,并在测量站点上安装测量设备,如全站仪等。
测量站点的选择应考虑到地势的平坦性和视线的通畅性,以确保能够准确测量角度和距离。
3. 开展测量:在测量站点设置完毕后,我们可以开始进行角度和距离的测量工作。
首先,利用测量设备测量出基准点和相邻点之间的水平角度;然后,利用测距仪等设备测量出基准点和相邻点之间的水平距离。
4. 计算高度差:在完成测量后,我们可以根据已知的角度、距离和基准点的高度,利用三角函数的运算来计算出相邻点的高度差。

三角高程测量新方法摘要:本文主要介绍了利用全站仪进行三角高程测量的一些新方法。
关键词:全站仪三角高程测量在传统的施工测量中,全站仪主要用于平面测量而高程主要靠水准仪几何水准测量,近年来随着全站仪精度的提高,三角高程已经可以取代三、四等水准测量,工程实践和文献介绍表明,三角高程甚至有取代二等水准测量的趋势。
这证明施工中完全可以用全站仪代替水准仪进行高程测量。
全站仪三角高程测量可以不受地形限制,在山区、高架桥、深基础施工高程放样中全站仪三角高程测量具有水准测量无法比拟的优越性。
可以用于路、桥、涵、墩、台、深基础的施工高程测量,提高了精度、效率。
1 三角高程控制测量施工单位在工程的施工过程中,常常涉及到高程测量。
传统的方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用,但精度较低,且每次测量都得量取仪器高、棱镜高,麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
而在道路施工中完全可以用全站仪来进行三角高程导线测量。
1.1 全站仪安置在测站的三角高程测量一般来说为了选线、测带状地形图及施工测量方便,导线边长在1~200m 属正常,但是设计、施工之间有一定时间间隔,控制点难免有损坏,而且有些线路设计单位本身布网点间距就较大,当导线边较长、倾角较大,应将斜长化为平距并将水平长度归化到投影水准面上。
设斜长为l,斜长l投影在水准面上的长度s,地球曲率影响的角度γ为s 所对应地球圆心角,天顶距а,折光角γ1。
仪器高i,棱镜高v。
考虑到cos(γ/2)≈1, cos(γ/2-γ1)≈1,h=lcosа+lsinаsin(γ/2-γ1)+i-v,设近似高差h′=lcos а,近似高差的改正值δh=lsinаsin(γ/2-γ1)h=h′+δh+i-v 往返测量高差的差值:dh=h?ab+h?ba+2lsinаsin(γ/2-γ1)+(ia+ib)-(va+vb)取往返测量的高差平均值进行平差得到最终高程。

三角高程测量原理讲解学习三角高程测量的原理基于三角形的几何性质和三角函数的运用。
三角高程测量中,我们通常选择一个具有高程已知的点作为起始点,再选择一个观测点作为目标点,然后使用测量仪器测量起始点和目标点之间的距离差和水平角差,从而推算目标点的高程。
1.设置基线:首先需要选择一个距离目标点较近的、地势相对较平坦的观测站点作为起始点,同时在观测站点上安装测量仪器,将其与目标点连线称为基线。
2.观测距离:在起始点测量仪器上安装测距仪,通过观测距离仪器测量起始点到目标点的水平距离。
测量时需要注意排除大气折射和大地曲率的影响,采用纠正方法对测量结果进行修正。
3.观测角度:在起始点测量仪器上安装测角仪,通过观测角度仪器测量起始点到目标点的水平角度差。
测角仪器可以测量水平方向的角度差,也可以测量垂直方向的角度差,根据具体情况选择合适的仪器。
4.计算高程差:根据观测距离和角度,可以使用三角函数计算出目标点的高程差。
其中,观测距离和角度差可以通过观测仪器直接读取,高程差的计算可以使用正弦定理、余弦定理等方法进行计算。
需要注意的是,在三角高程测量中,观测站点和目标点之间的距离差通常比较小,所以需要选用高精度的测距和测角仪器,同时在实际操作中也需要注意测量时的环境因素,如大气状态、地球引力等对测量结果的影响。
此外,三角高程测量还可以通过建立高程网,将多个观测点连接起来,依次进行三角高程测量,从而形成一个相对完整的高程测量网,对于大范围的地理位置高程测量具有较高的精度和可靠性。
总结起来,三角高程测量原理是一种通过测量观测站点与目标点之间的距离差和水平角差,然后利用三角函数的运算,来计算目标点的高程差的方法。
它是一种常用且有效的测量方法,可以用于山区、河流等地形复杂的区域,具有较高的精度和可靠性。
在实际操作中,需要选用高精度的测距和测角仪器,并注意环境因素对测量结果的影响。
通过建立高程网,可以拓展三角高程测量的应用范围,获得更全面的高程信息。
第33卷第6期2010年12月测绘与空间地理信息G E O M A TI C S&S PA T I A L l N FO R M A T I O N T E C H N O L O G YV01.33.N O.6D ec.,2010浅谈三角高程测量方法及精度分析崔克忠(吉林省地理信息工程院。
吉林长春130051)摘要:分析了一般的三角高程测量方法的局限性,在实践中总结了一种便捷的三角高程测量的新方法。
同时还论证了用三角高程测量代替三、四等水准测量的理论依据,并采用全站仪任意置站的方法,测量时不必量取仪器高、棱镜高,既减少了三角高程的误差来源,又加快了施测速度。
关键词:三角高程;精度;操作方法;论证中图分类号:P224.2文献标识码:B文章编号:1672—5867(2010)06—0215—02N ew M et hod of T r i gonom et r i c L evel i ng and A ccur acy A nal ys i sC U I K e—z hong(Ji l i n I n st i t ut e of G eom at i cs E ngi neer i ng,C han gchun130051,C hi na)A b s t ra c t:Thi s pape r ana l yz es t he ge ne r al l i m i t at i on s of t r i gon om e t r i c l eve l i ng m et h od,s um m ed up i n pr act i ce a new conveni ent m et h—od of t r i gon om e t r i c l ev el i ng.I t al s o de m ons t r a t e s t he t heor et i ca l basi s of usi ng t r i gonom et r i c l eve l i ng i ns t ead of l evel m ea s u r e m e n t.U-s i ng t he m et h od of any on e s et po i nt by t o t al s ta t ion,i t i s not ne ce ssa r y t o m e as ur e t he hei g ht of i n st r u m en t and pr i sm,w hi c h not oll l y r educ es t he t r i gon om e t r i c l eve l i ng er r or sou r ces,but al s o acc el er at es t he sur veyi ng s peed.K e y w o r ds:t r i gon om e t r i c l ev el i ng;acc ur acy;oper at i on m e t ho d;di s cus si o n0引言1三角高程测量原理及精度城市规划是城市建设和发展的龙头,城市测绘是规划编制和管理的基础。
随着社会的进步,使用跟踪杆配合全站仪测量高程的方法越来越普及,而传统的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
工程的施工过程中,经常涉及到高程丈量。
保守的丈量方法是水准丈量、三角高程丈量。
两种方法虽然各有特色,但都存在着不足。
水准丈量是一种直接测高法,测定高差的精度是较高的但水准丈量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程丈量是一种间接测高法,不受地形起伏的限制,且施测速度较快。
大比例地形图测绘、线型工程、管网工程等工程丈量中广泛应用。
但精度较低,且每次丈量都得量取仪器高,棱镜高。
比较麻烦并且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用保守的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
一、三角高程丈量的激进方法如图一所示,设AB为地面上高度不同的两点。
已知A点高程HA 只要知道A点对B点的高差HA B即可由HB=HA +HA B得到B点的高程HBD为AB两点间的水平距离;α为在A点观测B点时的垂直角;i为测站点的仪器高,t为棱镜高;HA 为A点高程,HB为B点高程;V为全站仪望远镜和棱镜之间的高差(V=Dtanα)首先我假设AB两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hA B可在A点架设全站仪,B点竖立跟踪杆,观测垂直角α,并直接量取仪器高i和棱镜高t若AB两点间的水平距离为D则hA B=V+i-t故 HB=HA +Dtanα+i-t1这就是三角高程丈量的基本公式,但它以水平面为基准面和视线成直线为前提的因此,只有当AB两点间的距离很短时,才比较准确。
三角高程测量原理
1.建立控制点:首先在测量区域内选择一些控制点,确定其具体位置和地面高程,以提供测量基准。
2.三角网的建立:根据实际情况,选择控制点,用直角坐标法或者经纬度法建立地面控制网,包括水平控制网和垂直控制网。
3.角度测量:在三角形内测量各个角的大小,可使用全站仪、经纬度仪等精密测量仪器,或者使用经典的光学仪器,如经纬仪、准直仪等。
4.边长测量:在三角形的两边上测量距离,并转化为实际长度,通常使用测距仪、全站仪等测量仪器。
5.计算高程差:根据正弦定理和余弦定理,利用角度、边长的测量结果,计算出各个点之间的高程差。
6.绘制地形图:根据计算结果,绘制出测量区域的地形图,以直观地表示各个点的高程差。
可以通过数字化方式输入到计算机中,借助地理信息系统(GIS)进行处理和分析。
在实际应用中,三角高程测量常用于测量道路、河流、山地等大范围地形。
同时也可以结合其它测量方法,如水准测量、GPS测量等,以提高测量结果的精度和可靠性。
总之,三角高程测量原理是一种测量地表高程差的有效方法,通过测量三角形的角度和边长,计算出各个点之间的高程差,从而绘制出准确的地形图。
在土地测量、地理测量等领域有广泛应用。
浅谈新三角高程测量法
摘要:在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。
但精度较低,且每次测量都得量取仪器高,棱镜高。
麻烦而且增加了误差来源。
关键词:新三角高程测量法测量
在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。
但精度较低,且每次测量都得量取仪器高,棱镜高。
麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
经过长期摸索,总结出一种新的方法进行三角高程测量。
这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法
如图一所示,设A,B为地面上高度不同的两点。
已知A点高程H
A,
只要知道A点对B点的高差H
A B 即可由H
B
=H
A
+H
A B
得到B点的高
程H
B。
图一
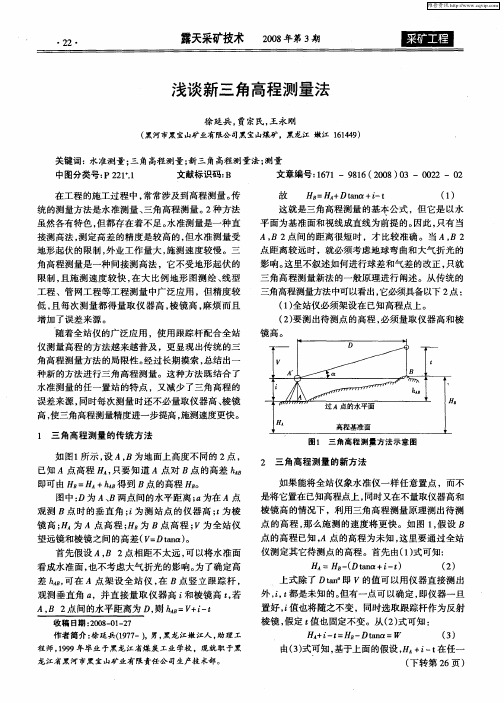
图中:D为A、B两点间的水平距离
а为在A点观测B点时的垂直角
i为测站点的仪器高,t为棱镜高
H A为A点高程,H B为B点高程。
V为全站仪望远镜和棱镜之间的高差(V=D tan а)
首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差h
A B
,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,
则h
A B
=V+i-t
故H
B =H
A
+D tanа+i-t (1)
这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距
离很短时,才比较准确。
当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:
1、全站仪必须架设在已知高程点上
2、要测出待测点的高程,必须量取仪器高和棱
镜高。
二、三角高程测量的新方法
如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。
如图一,假设B 点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。
首先由(1)式可知:
H
A =H
B
-(D tanа+i-t)(2)
上式除了D tanа即V的值可以用仪器直接测出外,i, t都是未知的。
但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t 值也固定不变。
从(2)可知:
H
A +i-t=H
B
-D tanа=W(3)
由(3)可知,基于上面的假设,H
A
+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。
这一新方法的操作过程如下:
1、仪器任一置点,但所选点位要求能和已知高程
点通视。
2、用仪器照准已知高程点,测出V的值,并算出
W的值。
(此时与仪器高程测定有关的常数如测站点高
程,仪器高,棱镜高均为任一值。
施测前不必设定。
)
3、将仪器测站点高程重新设定为W,仪器高和棱
镜高设为0即可。
4、照准待测点测出其高程。
下面从理论上分析一下这种方法是否正确。
结合(1),(3)
H
B
′=W+D′tanа′(4)
H
B
′为待测点的高程
W为测站中设定的测站点高程
D′为测站点到待测点的水平距离
а′为测站点到待测点的观测垂直角从(4)可知,不同待测点的高程随着测站点到其的水平距离或观测垂直角的变化而改变。
将(3)代入(4)可知:
H
B ′=H
A
+i-t+D′tanа′(5)
按三角高程测量原理可知
H
B
′=W+D′tanа′+i′-t′(6)
将(3)代入(6)可知:
H
B ′=H
A
+i-t+D′tanа′+i′-t′(7)
这里i′,t′为0,所以:
H
B ′=H
A
+i-t+D′tanа′(8)
由(5),(8)可知,两种方法测出的待测点高程在理论上是一
致的。
也就是说我们采取这种方法进行三角高程测量是正确的。
综上所述:将全站仪任一置点,同时不量取仪器高,棱镜高。
仍然可以测出待测点的高程。
测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。
整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。
同时需要指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值t增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。