全站仪三角高程测量不同方法的比较和分析
- 格式:pdf
- 大小:308.11 KB
- 文档页数:5

三角高程测量方法三角高程测量方法三角高程测量是一种常用的高程测量方法,其通过三角函数计算出两点之间的高差,从而得到目标点的高程。
三角高程测量方法具有精度高、操作简便、适用范围广等特点,广泛应用于工程测量、地形测量、城市规划等领域。
一、直接测量法直接测量法是一种简单而实用的高程测量方法。
其基本原理是利用水准仪和水准尺直接测量两点之间的高差。
在已知高程的基准点上设置水准仪,将水准尺放置在待测点上,读取水准尺上的读数,然后通过水准仪的水平视线读取水准尺上的高程。
直接测量法的优点是操作简便、精度高,适用于小范围的高程测量。
二、间接测量法间接测量法是一种通过测量角度和距离来计算高程的方法。
其基本原理是利用全站仪或测距仪测量两点之间的距离和角度,然后根据三角函数计算出两点之间的高差。
间接测量法的优点是不需要设置水准点,适用于大范围的高程测量。
但是,由于需要考虑地球曲率和大气折光等因素,间接测量法的精度相对较低。
三、水准测量法水准测量法是一种经典的几何高程测量方法。
其基本原理是利用水准仪和水准尺测量两点之间的高差。
水准仪由望远镜、水准器和基座组成,水准尺通常由玻璃钢或铝合金制成。
通过水准仪的望远镜和水准器,可以精确地读取水准尺上的读数和高程。
水准测量法的优点是精度高、操作简便,适用于各种地形的高程测量。
但是,由于需要设置多个水准点,水准测量法的劳动强度较大。
四、GPS测量法GPS测量法是一种利用全球定位系统进行高程测量的方法。
其基本原理是利用GPS接收机接收卫星信号,通过求解卫星至目标点之间的几何距离和卫星钟差等参数,计算出目标点的高程。
GPS测量法的优点是不需要设置水准点,适用于大范围的高程测量。
同时,GPS测量法的精度也较高,能够满足大多数工程测量的要求。
但是,由于信号受到建筑物、树木等遮挡物的影响,GPS测量法在城市地区的使用受到一定的限制。
综上所述,三角高程测量方法具有多种类型,每种方法都有其特点和应用范围。

全站仪三角高程测量方法及精度分析摘要:通过结合全站仪和跟踪杆,我们可以大大提升测量高程的准确性,并且随着应用频率的增加,这种方法也会受到越来越多的重视。
相比于传统的三角测量方法,新型的三角测量技术不仅可以克服其局限性,还能够大大降低误差,提升测量精度。
通过采用无需重复测量仪器和棱镜高度的方式,可以大大减轻外部作业的负担,并且提高测量的效率,这种方法在实际应用中表现出色。
关键词:全站仪;三角高程测量;测量方法;精度分析引言通过使用全站仪测量三角高程,我们可以建立一个三维坐标控制网。
这种方法包括对向观测法和中间观测法。
在进行对向观测时,我们通常会将大气折射系数视为一个常数,但是如果我们忽略了不同方向折射系数的差异性,那么我们就无法准确地评估整个系统的精度。
通过中间观测法,我们可以将折光系数作为一个方向变量来考虑大气折射误差对三角高程测量的影响。
因此,本文将详细介绍三角高程测量方法,并对它们的准确性进行比较分析。
1研究背景和现状高程测量是测量工作的重要组成部分,现代高程测量技术包括水准测量、三角测量和GPS高程测量。
然而,GPS 高程测量技术存在测量精度较低的问题,无法满足日常测量的需求。
此外,传统的三角测量技术,如全站仪测量,也存在一定的局限性,无法满足高程测量的需求。
通过使用全站仪进行三角测量,可以获得两点之间的垂直高度差,这种方法比传统的水平测量更加精确,而且由于没有受到地形的影响,可以更加迅速、准确地完成测量任务。
2全站仪的基本测量原理测量是一项重要的技术,它的主要目的是测量物体的位置、倾斜角、高差。
与传统的测量方式不同,全站仪可以快速、准确地完成测量,大大提高了测量效率,并有效地减少了测量结果的偏差。
全站仪望远镜具有独特的优势,它的核心技术就是其精准的视准轴、高精度的测距光波发射与接收光轴的同轴化,以及可靠的双轴自动倾斜补偿,使得它可以一次性完成所有的测量要素,并确保测量结果的准确性。
3全站仪三角高程测量方法特征分析以及研究进程3.1单向观测法使用全站仪三角高程测量单向观测法可以获得较高的水准测量精度,但是在进行测量之前,必须充分考虑地球曲率和大气折射带来的可能影响,这将会对测量结果产生重大影响。



全站仪三角高程测量的方法与误差分析摘要:本文介绍了三角高程测量原理以及全站仪三角高程测量的不同方法,对于每种方法所能达到的精度进行分析。
关键词:三角高程测量;单向观测;对向观测;中间自由设站;精度分析1.前言全站仪三角高程测量可以少受地形限制,在山区、高架桥、深基础施工高程放样中全站仪三角高程测量具有水准测量无法比拟的优越性。
可以用于路、桥、涵、墩、台、深基础的施工高程测量,提高了精度、效率。
对各种施工条件下的三角高程测量方法:高程放样测量、后方交会三角高程测量、悬高测量等进行了介绍和探讨,实践表明,全站仪三角高程测量完全可以取代三、四等水准测量,并有取代二等水准仪的趋势。
2.仪器和基本原理2.1全站仪的介绍与使用全站仪的工作特点:1、能同时测角、测距并自动记录测量数据;2、设有各种野外应用程序,能在测量现场得到归算结果;3、能实现数据流;全站仪几种测量模式介绍:1、角度测量模式;2、距离测量模式;3、坐标测量模式2.2三角高程测量的基本原理式中:S往、S返、a 往和a返分别为往返观测的斜距和竖直角,i 往、i返、v 往和v返分别为往返观测的仪器高和棱镜高,K 往和K 返分别为往返观测时的大气折光系数。
在全站仪进行往返测量时,如果观测是在相同气象条件下进行的,特别是在同一时间进行,则可假定大气折光系数对于反向观测基本相同,因此可得对向观测计算高差的基本公式为:(3-2-4)4.2.2 全站仪对向三角高程测量的中误差根据误差传播定律4.2.3 全站仪中点法高程测量的中误差根据误差传播定律,对式(3-3-4)进行微分,并转变为中误差关系式,则式(3-3-4)可变化为:为了对全站仪高程测量的 3 种方法进行验证,分析各种方法的精度,本研究选取 m=±2 &精度的全站仪为例,其测距精度为由表 2 可知,3 种测量方法中对向观测的误差最低,精度最好,中点法测量次之,单向高程测量精度最差。
全站仪三角高程测量的方法与误差分析本科毕业论文全站仪通过发射一束可见光束,测量激光束从仪器到目标反射点的时间,并通过时间差计算出仪器与目标点之间的距离。
三角高程测量是利用全站仪的水平角和垂直角的测量结果,结合已知的基线长度,通过三角形计算出目标点的高程。
1.设置仪器:将全站仪放置在测站点上,确保仪器的水平和垂直准星位于同一平面上。
2.瞄准目标点:通过望远镜瞄准需要测量高程的目标点。
3.测量水平角:通过全站仪记录目标点与两个已知点的水平角。
4.测量垂直角:通过全站仪记录目标点与水平面的垂直角。
5.计算高程:根据测量的水平角和垂直角以及已知基线长度,通过三角形计算出目标点的高程。
6.数据处理:根据多次测量的结果,进行数据平差处理,获得更准确的测量结果。
在全站仪三角高程测量中,需要考虑的误差主要包括仪器误差、自然因素和操作误差。
仪器误差包括仪器刻度误差、指向误差和折射误差等,可以通过定期校准仪器和使用精确的仪器控制误差。
自然因素包括大气折射、大地水准曲率和大地水准面偏差等,可以通过校正和补偿来减小误差。
操作误差主要包括读数误差、瞄准误差和放样误差等,可以通过培训和规范操作来减小误差。
为了进一步分析误差,可以采用误差理论进行误差分析。
误差理论可以通过误差传播法则计算最终测量结果的误差范围。
同时,可以通过实验和模拟等方法验证误差分析的有效性,并提出改进测量方法和减小误差的措施。
综上所述,全站仪三角高程测量是一种常用的测量方法,能够提供准确的高程数据。
在实际测量中,需要注意仪器的校准和控制、自然因素的校正和补偿,以及规范的操作。
通过误差分析,可以评估测量结果的准确性,并提出改进测量方法和减小误差的建议,从而提高测量的可靠性和准确性。
随着全站仪在工程测量中的普及,使用既可任意置站,又可减少误差来源,同时还无需每次量取仪器高及棱镜高度的棱镜跟踪杆配合全站仪测量高程方法,已愈发受到广大测量人员青睐。
通过已有工程实例证明,无量高全站仪三角高程测量法可使测量精度进一步提高、施测速度更快,特别适合于复杂环境下工程的应用。
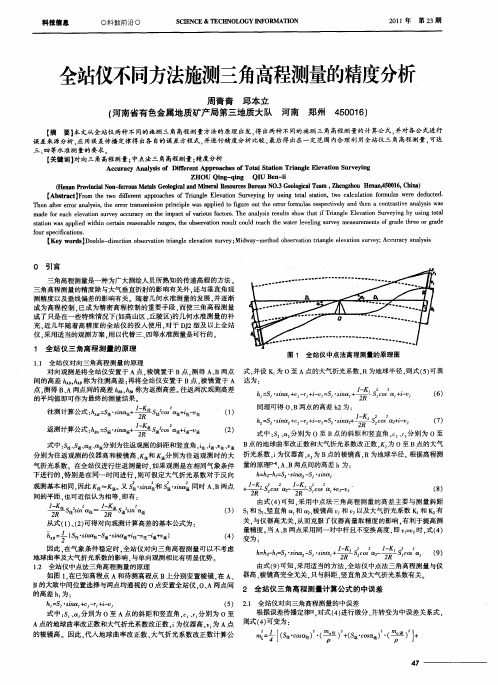
1 无量高全站仪三角高程测量法1.1 测点高程H测高法(1)公式推导图1为传统三角高程测量示意。
设HB为B点高程,已知;H A为A点高程,未知;现通过全站仪测定其他待测点的标高图1中,D为A、B两点间的水平距离,即高斯投影平面上两点的距离;i为测站点的仪器高。
图1 传统三角高程测量示意H A=H B-D tanα-i+t式中:D tanα即V值可用仪器直接测出,i、t均未知,但因仪器置好后,i 值将随之不变,同时选取棱镜跟踪杆作为反射棱镜,棱镜高度值t也将不变。
故待测点的高程为:HA+i-t=H B-D tanα=H0。
H A+i-t在任意测站上固定不变,且可以计算出其测站点高程H0。
故有H求= H0+D'tanα'+i-t。
式中:H求为待测点高程;D'为测站点到待测点的水平距离;α'为测站点到待测点的观测垂直角。
当i=0、t=0时,H求= H0+D'tanα'。
(2)操作过程1)选择与已知高程点通视的位置将仪器任意置点。
2)测出V值,计算出H0。
3)重新设定仪器测站点高程为H0,且设置仪器高及棱镜高为0。
4)照准待测点,测出其高程。
1.2 借高三维Z坐标测高法(1)公式推导借高三维Z坐标值测高法测量如图2所示,B=BM为后视点B的高程代号。
假设B点的高程H;已知,C点的高程HC未知,A点为任意置站点,通过全站仪测定C点的高程HC。
图2 借高三维Z坐标值测高法测量示意由Z坐标测量原理可知:Z B=Z A+D tanα+i-t式中:D tanα即V值可以用仪器直接测出,测出V值后将仪器中仪高值i改设为(t-D tanα)值、将测站点ZA坐标设置为基准点高点H B。
工程测量中三角高程测量的误差分析及解决方法戚忠中国水利水电第四工程局有限公司测绘中心,青海西宁,邮编810007一引言一直以来,为保证精度,高等级高程测量都采用几何水准的方法。
而在某些特定环境下,几何水准往往会耗费大量的人力、物力,且受地形等条件因素影响较大!鉴于几何水准在某些特定情形下无法进行的问题,探讨如何提高三角高程测量的精度,以保证其测量成果的可行性和可靠性,使得三角高程测量成果足以替代几何水准。
随着高精度全站仪的问世,结合合理的方式、方法,运用三角高程替代几何水准测量是切实可行的。
三角高程代替几何水准可以解决跨河水准及高边坡、危险地段无法进行精密几何水准测量的难题,保障危险地段测量人员和仪器设备的安全,提高了工作效率,降低了测量成本。
二三角高程测量误差分析常见的三角高程测量有单向观测法、中间法和对象观测法,对向观测法可以消除部分误差,故在三角高程测量中采用较为广泛。
对向观测法三角高程测量的高差公式为:(1)式中:D为两点问的距离;a为垂直角;为往返测大气垂直折光系数差;i为仪器高;v为目标高; R为地球曲率半径(6370 km);为垂线偏差非线性变化量;令。
对式(1)微分,则由误差传播定律可得高差中误差:(2) 由式(2)可知影响三角高程测量精度主要有:1.竖直角(或天顶距)、2.距离、3.仪器高、4.目标高、5.球气差。
第1、2项可以通过试验观测数据分析选择精度合适的仪器及其配套的反光棱镜、温度计、气压表等,我们选择的是徕卡TCA2003及其配套的单棱镜、国产机械通风干湿温度计、盒式气压计;第3、4项,一般要求建立稳定的观测墩和强制对中装置,采用游标卡尺在基座3个方向量取,使3个方向量取的校差小于0.2 mm,并在测前、测后进行2次量测;第5项球气差也就是大气折光差,也是本课题的研究重点。
三减弱大气折光差的方法和措施大气折光差:是电磁波经过大气层时,由于传播路径产生弯曲及传播速度发生变化而引起观测方向或距离的误差。