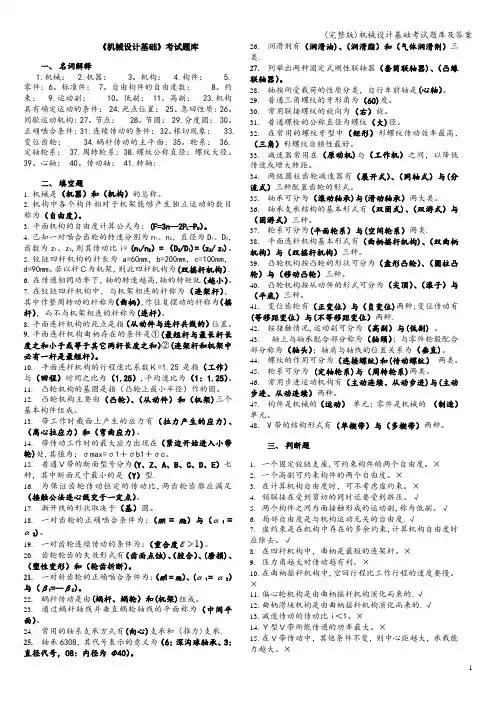
转动导杆机构
- 格式:ppt
- 大小:373.50 KB
- 文档页数:12
机械设计习题第十三单元习题1、构件是机构的_____________单元,零件是是机构的_____________单元。
2、机构是由_______组合而成;构件是机构的_____________单元,零件是是机构的_____________单元。
3、机构是由_________组合而成,它们之间具有____________________________。
4、运动副可分为_______和________两种;它们分别是______和_______不同接触形式。
5、复合铰链是_______个以上构件铰链在一起构成的转动副;计算自由度时处理的方法是____________________________________。
6、机构具有确定相对运动的条件是机构的______________并与机构___________相等。
7、构件是机构中()的单元;从动件行程速比系数为()时,机构具有急回特性。
A、联接B、制造C、运动D、K>0E、K≥1F、K>18、机构运动简图是(),机构示意图是()。
A、用构件和运动副的代表符号,表示出机构运动特征的图形。
B、按一定的比例,用构件和运动副的代表符号,表示出机构运动特征的图形。
9、计算机构的自由度,并判断机构是否具有确定的相对运动?2、计算机构的自由度。
第十四单元习题1、铰链四杆机构可演化成为______________、______________、______________、____________四种基本类型。
2、在铰链四杆机构中,存在一个曲柄的条件是__________________________________、____________________________。
3、在曲柄摇杆机构中,以曲柄为原动件机构可能存在_______特性;以摇杆为原动件机构可能存在_______位置。
4、雷达天线为______________机构、火车车轮的联动机构为______________机构;空气压缩机采用的是_____________机构。
% 转动导杆机构运动分析% 已知条件n=200;omega_1=pi*n/30; % 主动件导杆转速和角速度(rad/s)lambda=0.5; % 机构尺度系数alpha_p=45; % 机构许用压力角du=180/pi;hd=pi/180; % 角度与弧度转换系数disp ' ******** 已知条件********'fprintf (' 导杆转速n = %3.4f r/min \n',n)fprintf (' 导杆角速度omega_1 = %3.4f rad/s \n',omega_1)fprintf (' 机构尺度系数lambda = %3.4f \n',lambda)fprintf ('机构许用压力角alpha_p = %3.4f °\n',alpha_p)% 1-计算机构运动参数for phi_1=1:360phi_3(phi_1)=phi_1-asin(lambda*sin(phi_1*hd))*du; % 从动件曲柄角位移omega_3_z=lambda*cos(phi_1*hd);omega_3_m=sqrt(1-lambda^2*sin(phi_1*hd)^2);omega_3(phi_1)=omega_1*(1-omega_3_z/omega_3_m); % 从动件曲柄角速度i_31(phi_1)=omega_3(phi_1)/omega_1; % 机构传动比alpha(phi_1)=asin(lambda*sin(phi_1*hd))*du; % 机构压力角enddisp ' 'disp ' *** 转动导杆机构的运动参数***'disp ' 导杆转角曲柄角位移曲柄角速度'disp ' (°) (°) (rad/s) 'for phi_1=10:10:360ydcs=[phi_1 phi_3(phi_1) omega_3(phi_1)];disp(ydcs)end% 2-绘制机构的运动线图figure(1);subplot(2,1,1) % 曲柄角位移线图phi_1=1:360;plot(phi_1,phi_3);xlabel ('导杆转角\it \phi_1 / \rm( °)')ylabel ('\it \phi_3 / \rm(°)')title('从动件曲柄角位移线图');subplot(2,1,2) % 曲柄角速度线图phi_1=1:360;plot(phi_1,omega_3);xlabel ('导杆转角\it \phi_1 / \rm( °)')ylabel ('\it \omega_3 / \rm(rad/s)')title('从动件曲柄角速度线图');% 3-绘制机构的压力角线图figure(2);phi_1=1:360;plot(phi_1,alpha);xlabel ('导杆转角\it \phi_1 / \rm( °)');ylabel ('\it \alpha / \rm(°)');line([0,360],[alpha_p,alpha_p]);text(365,45,'\alpha_{max}=45°');line([0,360],[0,0]); % 横坐标line([0,360],[-alpha_p,-alpha_p]);text(365,-45,'\alpha_{min}=-45°');title('机构压力角线图');text(230,30,'可行域');% 4-绘制机构的传动比线图和传动比与尺度系数关系线图figure(3);subplot(1,2,1) % 机构传动比线图phi_1=1:360;plot(phi_1,i_31);xlabel ('导杆转角\it \phi_1 / \rm( °)')ylabel ('\it i_{31}')title('机构传动比线图(尺度系数是定值)');subplot(1,2,2) % 机构传动比与尺度系数关系线图line([0,sin(alpha_p*hd)],[1,1+sin(alpha_p*hd)]);line([0,sin(alpha_p*hd)],[1,1-sin(alpha_p*hd)]);line([sin(alpha_p*hd),sin(alpha_p*hd)],[1+sin(alpha_p*hd),1-sin(alpha_p*hd)]); xlabel ('尺度系数\it \lambda = e / l_3 ')ylabel ('\it i_{31}')title('传动比与尺度系数关系线图');text(0.25,1.4,'\it i_{31max}')text(0.32,1.0,'可行域')text(0.25,0.6,'\it i_{31min}')******** 已知条件********导杆转速n = 200.0000 r/min导杆角速度omega_1 = 20.9440 rad/s机构尺度系数lambda = 0.5000机构许用压力角alpha_p = 45.0000 °*** 转动导杆机构的运动参数***导杆转角曲柄角位移曲柄角速度(°) (°) (rad/s)10.0000 5.0191 10.592020.0000 10.1534 10.956430.0000 15.5225 11.577540.0000 21.2528 12.472550.0000 27.4790 13.657060.0000 34.3411 15.135170.0000 41.9757 16.886680.0000 50.5013 18.854790.0000 60.0000 20.9440100.0000 70.5013 23.0332 110.0000 81.9757 25.0013 120.0000 94.3411 26.7528 130.0000 107.4790 28.2309 140.0000 121.2528 29.4154 150.0000 135.5225 30.3104 160.0000 150.1534 30.9315 170.0000 165.0191 31.2959 180.0000 180.0000 31.4159 190.0000 194.9809 31.2959 200.0000 209.8466 30.9315 210.0000 224.4775 30.3104 220.0000 238.7472 29.4154 230.0000 252.5210 28.2309 240.0000 265.6589 26.7528 250.0000 278.0243 25.0013 260.0000 289.4987 23.0332 270.0000 300.0000 20.9440 280.0000 309.4987 18.8547 290.0000 318.0243 16.8866 300.0000 325.6589 15.1351 310.0000 332.5210 13.6570 320.0000 338.7472 12.4725 330.0000 344.4775 11.5775 340.0000 349.8466 10.9564 350.0000 354.9809 10.5920 360.0000 360.0000 10.4720。
机械基础第四版课后答案机械设计基础第四版课后答案【篇一:机械设计基础练习题_比较全面_有答案哦】p 1. 机构具有确定运动的条件是:___________________ 。
2. 一平面铰链四杆机构的各杆长度分别为a=350,b=600,c=200,d=700;(1) 当取c 杆为机架时,它为何种具体类型?___________;(2) 当取d 杆为机架时,则为___________ 。
3. 曲柄摇杆机构中,摇杆为主动件时,___________ 死点位置。
(a)不存在(b)曲柄与连杆共线时为(c)摇杆与连杆共线时为4. 为保证四杆机构良好的机械性能,___________ 不应小于最小许用值。
(a)压力角(b)传动角(c)极位夹角5. 平面四杆机构无急回特性时_______ ,行程速比系数_______(d)k>1(e)k<1(f)k=16. 在双曲柄机构中,已知三杆长度为a=80mm,b=150mm,c=120mm, 则d 杆长度为_______ 。
(a) <110mm (b)110mm≤d≤190mm(c)≥190mm7. 曲柄摇杆机构中,曲柄为主动件时,_______ 死点位置;(a)曲柄与连杆共线时为(b)摇杆与连杆共线时(c)不存在8. 在曲柄摇杆机构中,如果将_________ 杆作为机架,则与机架相连的两杆都可以作________运动,即得到双曲柄机构。
9. 曲柄摇杆机构产生“死点”位置的条件是,摇杆为_______ 件,曲柄为_______ 件。
10. 平面四杆机构中,若各杆长度分别为a=30 ,b=50 ,c=80 ,d=90 ,当以a 为机架,则该四杆机构为________________ 。
12. 在_______ 机构中,如果将_______ 杆对面的杆作为机架时,则与此相连的两杆均为摇杆,即是双摇杆机构。
13. 平面连杆机构当行程速比k________ 时,机构就具有急回特性。

《机械设计基础》考试题库一、 名词解释 1.机械: 2.机器: 3。
机构: 4.构件: 5.零件: 6。
标准件: 7。
自由构件的自由度数: 8。
约束: 9.运动副: 10。
低副: 11。
高副: 23.机构具有确定运动的条件: 24.死点位置: 25。
急回性质: 26。
间歇运动机构: 27。
节点: 28。
节圆: 29.分度圆: 30。
正确啮合条件: 31.连续传动的条件: 32。
根切现象: 33.变位齿轮: 34.蜗杆传动的主平面: 35。
轮系: 36.定轴轮系: 37.周转轮系: 38.螺纹公称直径:螺纹大径。
39。
心轴: 40。
传动轴: 41.转轴: 二、 填空题1. 机械是(机器)和(机构)的总称。
2. 机构中各个构件相对于机架能够产生独立运动的数目称为(自由度)。
3. 平面机构的自由度计算公式为:(F=3n —2P L -P H )。
4. 已知一对啮合齿轮的转速分别为n 1、n 2,直径为D 1、D 2,齿数为z 1、z 2,则其传动比i= (n 1/n 2)= (D 2/D 1)= (z 2/ z 1)。
5. 铰链四杆机构的杆长为a=60mm ,b=200mm ,c=100mm ,d=90mm 。
若以杆C为机架,则此四杆机构为(双摇杆机构).6. 在传递相同功率下,轴的转速越高,轴的转矩就(越小)。
7. 在铰链四杆机构中,与机架相连的杆称为(连架杆),其中作整周转动的杆称为(曲柄),作往复摆动的杆称为(摇杆),而不与机架相连的杆称为(连杆)。
8. 平面连杆机构的死点是指(从动件与连杆共线的)位置。
9. 平面连杆机构曲柄存在的条件是①(最短杆与最长杆长度之和小于或等于其它两杆长度之和)②(连架杆和机架中必有一杆是最短杆)。
10. 平面连杆机构的行程速比系数K=1.25是指(工作)与(回程)时间之比为(1.25),平均速比为(1:1.25)。
11. 凸轮机构的基圆是指(凸轮上最小半径)作的圆。
偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角鉳in能出现在曲柄与滑块的导路相平行的位置。
的答案是“错”。
摆动导杆机构不存在急回特性。
的答案是“错”。
在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。
的答案是“错”。
在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;而取导杆为原动件时,则机构有两个死点位置。
的答案是“对”。
在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。
的答案是“对”。
图示铰链四杆机构ABCD中,可变长度的a杆在某种合适的长度下,它能获得曲柄摇杆机构。
的答案是“错”。
曲柄摇杆机构只能将回转运动转换为往复摆动。
的答案是“错”。
在单缸内燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。
的答案是“错”。
增大构件的惯性,是机构通过死点位置的唯一办法。
的答案是“错”。
平面四杆机构有无急回特性取决于极位夹角是否大于零。
的答案是“对”。
任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。
的答案是“错”。
凡曲柄摇杆机构,极位夹角璞夭坏扔?0,故它总具有急回特征。
的答案是“错”。
平面四杆机构的传动角在机构运动过程中是时刻变化的,为保证机构的动力性能,应限制其最小值鉳in不小于某一许用值[鉣。
的答案是“对”。
在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。
的答案是“错”。
任何平面四杆机构出现死点时,都是不利的,因此应设法避免。
的答案是“错”。
平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角。
的答案是“错”。
转动导杆机构中不论取曲柄或导杆为原动件,机构均无死点位置。
的答案是“对”。
铰链四杆机构是由平面低副组成的四杆机构。
的答案是“对”。
在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角鉳in可能出现在曲柄与机架两个共线位置之一处。
的答案是“对”。
当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。
机械基础题题库及答案主编石岚朱中仕
广东机电职业技术学院
目录
目录 (II)
前言 (1)
常用机构和机械传动 (1)
第一章平面机构概述 (1)
一、填空题 (1)
二、判断题 (2)
三、选择题 (2)
四、综合题 (3)
第二章平面连杆机构 (4)
一、填空题 (4)
二、判断题 (5)
三、选择题 (5)
四、综合题 (6)
第三章凸轮机构 (7)
一、填空题 (7)
二、判断题 (7)
三、选择题 (8)
四、综合题 (8)
第四章带传动 (10)
一、填空题 (10)
二、判断题 (10)
三、选择题 (10)
四、综合题 (11)
第五章齿轮机构 (12)
一、填空题 (12)
二、判断题 (12)
三、选择题 (13)
第六章轮系 (17)
一、选择填空题 (17)
二、综合题 (17)
第七章联接 (19)
一、填空题 (19)
二、判断题 (19)
三、选择题 (19)
四、综合题 (20)
II。
机械原理题库三一、判断下列各结论的对错。
对的画“√”,错的画“×”号。
1Ⅳ级机构的自由度一定大于2。
( × )2在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。
( × )3转动导杆机构中一定有曲柄。
( √ )4曲柄摇杆机构中,若摇杆为原动件则机构无死点位置。
( × )5加工标准齿轮时若发生根切,则分度圆齿厚将变小。
( × )6等效转动惯量的值一定大于零。
( √ )7机构中原动件数应等于机构的自由度数。
( √ )8滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。
( √ )9在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。
( √ )10任何机构的从动件系统的自由度都等于零。
( √ )11经过动平衡的回转件一定不需要再做静平衡了。
( √ )12斜齿轮的端面摸数大于法面摸数。
( √ )13蜗杆传动中的蜗杆与蜗轮的螺旋旋向一定相同。
( √ )14当摩擦力大于驱动力时,机构处于自锁状态。
( × )15一对直齿轮啮合传动,模数越大,重合度也越大。
( × )二、单选题。
以下各小题给出的4个答案中,只有一个是正确的。
试确定正确答案的标号。
1、在对心曲柄滑块机构中,若曲柄长度增加,则滑块行程将会( C )5cm A 不变 B 增大 C 增大 D 减小5cm 10cm 10cm2、某尖顶直动对心盘状凸轮机构中,若凸轮转速增大1倍则从动件的最大位移将会( A )A 不变 B 增大1倍 C 增大2倍 D 增大4倍3、双自由度机构中只有2个( B )A 闭式运动链B 原动件C 从动件D 机架4、一对直齿圆柱齿轮组成的传动机构中,现将其中心距加大,则相应变化的是( C )A 齿顶圆 B 分度圆 C 节圆 D 基圆5.正变位齿轮的齿距p (A )A B C D m π=m π>m π<mπ≤6.在周期性速度波动中,一个周期内等效驱动力做功与等效阻力做功的量值关系是(D )A B C D d r W W >d r W W <d r W W ≠d rW W =7.凸轮转速的大小将会影响(D )A 从动杆的升距B 从动杆处的压力角C 从动杆的位移规律D 从动杆的速度8.对于杆长不等的铰链四杆机构,下列叙述中哪一条是正确的?(B )A 凡是以最短杆为机架的,均为双曲柄机构;B 凡是以最短杆为连杆的,均为双摇杆机构;C 凡是以最短杆想邻的杆为机架的,均为双曲柄机构;D 凡是以最长杆为机架的,均为双摇杆机构;9.斜齿轮圆柱齿数的标准模数和标准压力角在(D )上A 端面 B 轴面 C 主平面 D 法面10.平面四杆机构中存在死点取决于(B )是否与连杆共线。
机械原理思考题参考答案机械原理思考题0-51.何谓机器?何谓机构?何谓机械?何谓构件?何谓零件?机器是执行机械运动的装置,用来变换或传递能量、物料、信息。
机器有三个特征:⑴是人为的实物的组合;⑵各部分之间具有确定的相对运动;⑶用来变换或传递能量、物料、信息。
用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统称为机构。
机构有两个特征:⑴是人为的实物的组合;⑵各部分之间具有确定的相对运动。
机械是机器和机构的总称。
构件是运动的单元。
一个构件可以包括一个或若干个零件。
零件是制造的单元。
2.何谓通用零件?何谓专用零件?在各种机械中经常用到的零件称为通用零件。
只在某些机械中用到的零件称为专用零件。
3.何谓平面机构?何谓空间机构?所有构件都在相互平行的平面内运动的机构称为平面机构,否则称为空间机构。
4.何谓自由度?一个作平面运动的自由构件有几个自由度?构件相对于参考系的独立运动称为自由度。
一个作平面运动的自由构件有3个自由度。
5.何谓运动副?何谓低副?何谓高副?两构件直接接触并能产生一定相对运动的连接称为运动副。
两构件通过面接触组成的运动副称为低副。
两构件通过点或线接触组成的运动副称为高副。
6.何谓机架?何谓原动件?何谓从动件?7.机架是机构中相对不动的构件。
原动件是运动规律已知的活动构件。
在机构运动简图中,通常要用箭头标明原动件的运动方向。
从动件是机构中随着原动件的运动而运动的其余活动构件。
8.转动副、移动副、高副各约束几个自由度?保留几个自由度?转动副约束2个自由度,保留1个自由度。
移动副约束2个自由度,保留1个自由度。
高副约束1个自由度,保留2个自由度。
9.机构具有确定运动的条件是什么?若此条件不满足,将会产生什么结果?机构具有确定运动的条件是F>0,且F等于原动件数。
F>0时,如原动件数目少于自由度数,则运动不能确定;如原动件数目多于自由度数,则机构不能满足所有原动件的给定运动。