圆柱凸轮参数化建模
- 格式:doc
- 大小:820.00 KB
- 文档页数:16

基于UG的圆柱凸轮模型全参数化设计
韩玉林
【期刊名称】《制造技术与机床》
【年(卷),期】2007(000)011
【摘要】在UG设计环境下,以从动件运动规律的数学分析为基础,建立正确的UG 表达式,使设计实现了参数化,加工实现了数字化.
【总页数】2页(P44-45)
【作者】韩玉林
【作者单位】宝鸡职业技术学院,陕西,宝鸡,721004
【正文语种】中文
【中图分类】TG5
【相关文献】
1.基于UG渐开线圆柱齿轮三维模型参数化设计 [J], 胡云龙;陈艳丽
2.基于UG的渐开线齿轮全参数化设计 [J], 孙广奇
3.基于UGNX的圆柱凸轮轮廓曲线的参数化设计 [J], 侯卫平;钟苏丽
4.基于UGNX的圆柱凸轮轮廓曲线的参数化设计 [J], 马建国
5.基于UG的圆锥凸轮模型全参数化设计 [J], 韩玉林
因版权原因,仅展示原文概要,查看原文内容请购买。
摘要机械产品正沿着两个方向发展:一是大型化、自动化、精密化、高速化和成套化,二是小型化、多功能、结构简单、使用可靠和成本低廉。
在此发展进程中,各种各样的自动机械占有令人瞩目的重要地位。
以凸轮机构为核心,已发展出成千上万种高效、小型、简易、精密、价廉的自动机械,遍布各行各业。
本文针对圆柱凸轮的特点,并结合五轴高速铣削加工技术,对圆柱凸轮的造型,加工工艺,CAM编程以及后置处理均进行了探讨研究,来提高圆柱凸轮加工质量。
关键词:圆柱凸轮;五轴数控加工;高速铣削加工技术AbstractMechanical products along two directions: one is the large-scale, precision, automation, high speed and complete, two is miniaturization, multifunction, simple structure, reliable use and low cost. In the course of development, the important position of various automatic machinery occupies a great. In cam mechanism as the core, has developed the automatic mechanical thousands of high efficiency, small, simple, precise and cheap, in all walks of life.Based on the characteristics of globoid indexing cam, and the combination of processing technology of five axis high-speed milling, the cam shape, processing technology, CAM programming and post processing were conducted a study, to improve the processing quality of the globoidal cam.Keywords: globoidal cam; five axis NC machining; high-speed milling technology目录摘要 (1)ABSTRACT (2)目录 (1)图表目录............................................................................................................................ 错误!未定义书签。

4.1 参数化设计原理采用Pro/ENGINEER 进行参数化设计,所谓参数化设计就是用数学运算方式建立模型各尺寸参数间的关系式,使之成为可任意调整的参数。
当改变某个尺寸参数值时,将自动改变所有与它相关的尺寸,实现了通过调整参数来修改和控制零件几何形状的功能。
采用参数化造型的优点在于它彻底克服了自由建模的无约束状态,几何形状均以尺寸参数的形式被有效的控制,再需要修改零件形状的时候,只需要修改与该形状相关的尺寸参数值,零件的形状会根据尺寸的变化自动进行相应的改变【17】。
参数化设计不同于传统的设计,它储存了设计的整个过程,能设计出一族而非单一的形状和功能上具有相似性的产品模型。
参数化为产品模型的可变性、可重用性、并行设计等提供了手段,使用户可以利用以前的模型方便地重建模型,并可以在遵循原设计意图的情况下方便地改动模型,生成系列产品【18】。
4.2 建立滚轮中心轨迹曲线方程 圆柱凸轮最小外径为:min2m D r B =⨯+ (37)由式(37)、(7)、(31)得:41m in 414100095.161080003224tan cos 100095.1610800032tan cos 200095.1610380002tan cos m h Ft h D r B h Ft h h Ft h D Dρααραααα---⎛⎫⨯⨯+ ⎪⎝⎭=⨯+=⨯+⎛⎫⨯⨯+ ⎪⎝⎭=+⎛⎫⨯⨯+ ⎪⎝⎭=+(38)圆柱周长L4200095.1610380002tan cos h Ft hD D L D ππαα-⎛⎫⎛⎫⨯⨯+ ⎪ ⎪⎝⎭ ⎪==+⎪⎪⎝⎭(39) 单个滚轮中心轨迹按周长展开,如图10所示:图10 单个滚轮中心轨迹按周长展开凸轮高度H1003H D D h=+⨯+ (40)以左下角做为作标原点,创建单个滚轮中心轨迹曲线方程。
推程位移轨迹线对应方程。
()()()()412/3200095.1610380002tan()cos /31cos 120/1/20s hphi pi h F t h D DD a x D pi ty s pi t phi z α-==*⎛⎫⨯**+ ⎪⎝⎭=+=**=*-**= (41)远休止轨迹线对应方程。

2021年第2期(总第145期)济南职业学院学报.r.«:Apr.2021No.2(Siri:l No.145)基于Creo2.0参数化设计的凸轮机构教学研究----以圆柱凸轮为例孙悦史建国刘晴(济南职业学院,山东济南250103)摘要:目前,在讲解凸轮机构时,均采用图解法进行教学,但对于圆柱凸轮,其从动件的导路与凸轮的运动平面垂直,属于空间凸轮机构,用图解法表达空间曲面比较困难。
通过圆柱凸轮作为实例,利用Creo2.0的参数化设计功能,分别绘制出推程角轮廓线、远休角轮廓线、回程角轮廓线、近休角轮廓线与凸轮外圆线,利用Creo2.0扫描功能,生成凸轮实体,并利用变参功能获得不同的圆柱凸轮轮廓,克服了图解法的缺点。
关键词:Creo2.0;设计;凸轮机构中图分类号:G712文献标志码:A文章编号:1673-4270(2021)02-0048-04一、弓言凸轮机构是机械中的一种常用机构,是凸轮作为主动件连续等速运动,而从动件能按任意要求的预期运动规律运行。
常用的从动件运动规律一般采用等速运动、等加速等减速运动、简谐运动等,任何一种运动规律都是一个连续的轨迹[1]。
在我们的教学中,对凸轮轮廓的设计目前都采用图解法进行教学,图解法就是做出从动件运动规律的位移线图,从中截取适当点,然后在基圆上绘制凸轮轮廓。
但是对于圆柱凸轮,其从动件的导路与凸轮的运动平面垂直,属于空间凸轮机构,用图解法表达空间曲面比较困难,因此在教学过程中,圆柱凸轮机构的教学往往是一大难点。
随着计算机软件的应用,将Creo2.0的功能与机械工程相结合,解决了原来教学中的棘手问题。
Creo2.0是美国PTC公司推出的一套博大精深的机械三维CAD/CAM/CAE参数化软件系统,能运用到工业造型设计、三维模型设计、分析计算、动态模拟与仿真、工程图输出和生产加工成产品的全过程。
在航天、汽车、机械等领域被广泛应用。
本文从这一角度出发,选择凸轮机构中难度较大的圆柱凸轮作为实例,利用Creo2.0的参数化功能,实现其设计,克服了图解法的缺点。

基于Creo的凸轮机构三维参数化设计及运动仿真刘鹏冯立艳李静卢家宣蔡保杰冷腾飞苗伟晨(华北理工大学以升创新基地河北·唐山063210)摘要本文主要介绍用Creo对凸轮机构进行参数化设计并以圆柱槽状凸轮机构为例进行运动仿真,再通过C#软件完成人机交互,即操作人只需在程序界面输入槽状凸轮相应参数即可完成凸轮的三维建模,从而绘制出相应的位移、速度、加速度曲线进入仿真和分析环节。
这样即缩短了凸轮的设计周期提高了设计质量,并且解决了凸轮教学课程存在的设备成本高、设备数量少、实验时间和空间受限等难题。
关键词凸轮Creo参数化仿真中图分类号:TP391.9文献标识码:A1基于Creo软件下的凸轮三维建模1.1Creo环境下槽状凸轮机构三维参数化造型基本思路(1)参数化过程需准备可变参数包括行程、推程角、远休角、回程角、近休角、外径、壁厚、基底高度、凸轮高度、槽深、槽宽,以上变量成为参数组。
(2)通过根据凸轮不同运动规律编写推程、远休止、回程、近休止段凸轮轮廓线方程,本例应用的凸轮推程回程为正弦加速度运动规律。
(3)分段绘制出理论轮廓曲线,将各段曲线首尾相连封闭,即为完整的凸轮理论廓线。
(4)生成凸轮实体;加入参变量,实现参数化。
1.2三维建模具体步骤Creo是如今今应用最广的三维绘图软件之一,主要用于参数化实体设计,它所提供的功能包括实体设计、曲面设计、零件装配、建立工程图、模具设计、、电路设计、装配管件设计、加工制造和逆向工程等。
其系统特性主要包含单一数据库、全参数化、全相关、基于特征的实体建模等,不仅能实现零件的参数化设计,也可以方便地建立各零部件的通用件库和标准件库,从而提高设计的效率和质量。
1.2.1槽状凸轮机构的三位参数化建模自行设定初步参数组,注意推程角、远休角、回程角、近休角之和为360,(2)运行creo软件,新建零件,进入界面。
(3)选择【工具:程序】,出现菜单管理器,选择编辑设计,出现记事本,在IN PUT和END PUT语句中间输入语句,然后存盘,确认将所做的修改体现到模型中,最后在菜单管理器中输入设定的初步参数值。

目录摘要 (2)1 前言 (2)1.1国内外研究现状及应用 (2)1.2研究的目的意义 (3)1.3本文研究的主要内容 (4)2 原始数据、凸轮曲线的选择和相关计算 (4)2.1原始数据 (5)2.2选择凸轮曲线 (5)2.3滚子从动件运动规律 (5)2.4圆柱凸轮最小有效半径的计算 (5)2.4.1计算原理 (5)2.4.2推回程圆柱凸轮最小有效半径的计算 (5)3 强度设计与计算 (7)3.1材料选择 (7)3.2计算理论 (7)3.3具体计算 (8)3.4轴颈剪切应力计算 (11)3.5双联圆柱凸轮参数的确定 (12)4 参数化设计与实体建模 (13)4.1参数化设计原理 (13)4.2建立滚轮中心轨迹曲线 (13)4.3运用Pro/E进行参数化设计步骤 (16)4.3.1创建新文件 (16)4.3.2创建用户参数 (16)4.3.3创建曲线方程 (17)4.3.4保存文件副本 (18)4.3.5创建凸轮实体 (18)4.3.6创建凸轮凹槽特征 (19)4.3.7创建环形弯折特征 (21)4.3.8应用编程的方法进行参数输入控制,已达到快速设计新产品的目的 (22)4.3.9验证程序设计效果 (23)4.3.10 保存零件模型文件 (24)4.4其它零件的参数化设计 (24)5 运动仿真与动态分析 (26)5.1仿真的准备特征 (26)5.2元件的装配步骤 (27)5.3运动仿真 (29)5.4动态分析 (30)6 总结与展望 (32)6.1小结 (32)6.2展望 (32)致谢 (33)参考文献 (33)双联圆柱凸轮的参数化设计与实体建模摘要:本文介绍了双联圆柱凸轮的研究现状和研究的目的意义以及应用前景,根据双联圆柱凸轮的特殊结构特点和特殊运动要求,选择了凸轮曲线,以最大许用压力角、导程、滚子直径和最大推力为参数,进行了强度的设计与计算,根据计算的结果,使用Pro/E软件进行参数化设计与实体建模,有助于缩短产品开发周期,运用Pro/E软件进行运动仿真与动态分析,在虚拟的环境中实现机构运动目的,对提高设计效率降低生产成本有很大的作用,并对加工制造形成产业化规模有着重要的意义。

圆柱凸轮的三维参数化设计及数控加工编程摘要:作为拥有良好运动性能的圆柱凸轮,会受到动件运动规律因素影响,生成复杂空间曲面,导致在设计、加工等方面面临较大困难。
本文对于圆柱凸轮的三维参数化设计及数控加工编程进行详细分析,通过Pro/E系统进行三维参数化设计,使用Master CAM软件进行数控加工编程。
旨在为我国众多制造企业提供技术帮助,推动国民经济有序发展。
关键词:圆柱凸轮;三维参数化设计;数控加工编程相较于平面凸轮机构,圆柱凸轮这种空间凸轮机构具有良好刚性,控制从动件运动稳定,可以满足机械高速运行的需求。
空间凸轮拥有这些特性,主要是因为其具有凸轮轮廓曲面。
考虑到圆柱凸轮设计、加工较为困难,过去常使用矩形平面取代圆柱面,并以平面凸轮计算轮廓坐标。
仍存在加工精度偏低的问题,无法满足制造业生产需求,需要寻找更加便利方法进行凸轮设计、加工。
1三维参数化设计对于圆柱凸轮三维参数化设计作业,需要将轮廓曲面设计作为重点内容严格对待。
以自变参数原始数据作为设计基础,建设三维模型,从而分析和三维模型相对应的参数化模型。
对于尖顶推杆圆柱凸轮,可以从正弦加速度、余弦减速度两个方面入手,利用这种运动规律,优化圆柱凸轮三维参数化设计工作。
1.1设计自变设计参数在设计圆柱凸轮的轮廓曲面时,其结构参数与从动件运动规律已经提前获得。
所以,在设计圆柱凸轮数据模型时,选择Pro/E系统的应用工具,设置圆柱凸轮自变参数后,赋予参数初值即可。
这里需要注意一点,对于推程角、远休角、回程角、近休角几个参数,需要保证初值之和为360°,即各段曲线是以封闭状态构成凸轮曲线[1]。
1.2利用方程曲线分段模式,描述轮廓曲面扫描轨迹控制线根据圆柱凸轮轮廓曲线数学模型和从动件运动规律,使用方程曲线对轮廓曲面扫描轨迹控制线进行描述。
主要选择推程角、远休角、回程角、近休角,利用这几个角度相对的轮廓曲面,描述圆柱凸轮的平面坐标。
1.3通过扫描变截面,获得凸轮实体选择Pro/E系统中的Fron模块,利用圆周描述凸轮轮廓扫描轨迹原始控制线。

作者: 冯建国
作者机构: 吉林航空维修有限责任公司
出版物刊名: 科技传播
页码: 106-106页
年卷期: 2011年 第4期
主题词: UGNX 圆柱凸轮 轮廓曲线 参数化设计
摘要:凸轮机构是一种广泛应用于各种机械和控制装置中的高副机构,只要能正确设计出凸轮的轮廓曲线,就可以通过凸轮机构实现各种复杂的预定的运动规律。
针对传统凸轮轮廓曲线设计方法的缺陷和不足,本文介绍了集CAD/CAE/CAM于一体的三维参数化软件UGNX在设计复杂圆柱凸轮轮廓曲线中的应用,为优化凸轮轮廓曲线设计方法提供了一定的参考依据。

第19卷第2期2008年4月中原工学院学报JOURNALoFZHoNGYUANUNIVERSITYoFTECHNOLoGYV01.19No.2Apr.,2008文章编号:1671—6906(2008)02--0065--04基于SolidWorks圆柱凸轮建模的优化设计郜海超,袁守华(中原工学院,郑州450007)摘要:首先推导出圆柱凸轮机构中圆柱凸轮的实际廓线方程,基于Solidworks平台分别采用参数解析法和圆柱凸轮反求法2种方式建模.然后通过实例验证表明,参数解析法不但能够根据廓线方程实现圆柱凸轮的精确建模,而且能够缩短凸轮研发周期,降低凸轮研发成本,提高凸轮设计与加工的效率,在凸轮设计、加工、制造方面具有较的高实用价值.关键词:SolidWorks;圆柱凸轮,三维造型;优化设计中图分类号:THl23文献标识码:A空间凸轮机构是1种典型的常用机构,由于它能以简单的机构实现任意复杂的预期运动及其具有良好的刚性和传动、导向、控制等功能,长期以来广泛应用于各种自动机中.随着纺织机械用于车锭脚螺纹的专用车丝机向高效率、高精度和高自动化的发展,作为专用车丝机核心部件的分度凸轮机构必须具有特征优良的凸轮曲线和高速、高精度性能.凸轮曲线特性优良与否直接影响凸轮机构的精度、效率和寿命;多年来,凸轮专家创造了数十种特性优异的凸轮曲线,如三角函数通用凸轮曲线,代数式通用凸轮曲线等.如何利用凸轮曲线进行凸轮轮廓三维设计,是CAD/CAM领域实现凸轮精确造型值得探讨的问题.关于凸轮机构类型确定情况下几何参数的优化设计已有成熟的理论和方法,基于一定的寻优策略和算法,即可获得最优解.凸轮机构的参数很多,如凸轮基圆半径、直动从动件偏距、滚子半径、摆动从动件长度及中心距等,其中有部分参数相互之间存在确定的函数关系.选择其中相互独立的参数作为设计变量,用通式表示为xEx。
,z。
,z。
]丁.以一定的评价指标作为凸轮机构优化设计的目标函数.由于最优解是针对某一个或某几个评价指标而言的,所以凸轮机构的优化设计具有相对性,且目标函数的选取非常重要,应充分反映设计要求,做到凸轮机构工作空间的极小化.因此,在圆柱凸轮机构的设计中,如何减小凸轮重量、减小凸轮收稿日期:2008--03--08作者简介:郜海超(1982一),男,河南驻马店人,硕士生.机构的体积、节省材料和减小惯性,以及如何选择合理的凸轮设计方法,是实现凸轮精确造型中值得探讨的问题.12种建模方法1.1参数解析法1.1.1圆柱凸轮轮廓线的数学模型对直动从动件圆柱凸轮建立如图1所示的固定坐标系,以z轴为圆柱凸轮的回转轴线,z轴与从动件处于最低位置时的轴线重合,原点为该轴线与凸轮轴线的交点,Y轴分别垂直于z和z轴.图I圆柱滚子直动从动件凸轮机构轮廓图图1中的几何参数有:凸轮圆柱半径R(忌≤R≤中原工学院学报2008年第19卷R。

凸轮参数化设计推导了直动从动件圆柱凸轮机构实际廓线的方程。
基于solidworks平台用vba开发了圆柱凸轮辅助建模软件,根据廓线方程可自动实现圆柱凸轮的精确建模,并为下一步运动仿真和数控加工奠定良好的基础。
空间凸轮机构在自动机械中得到了广泛的应用。
与平面凸轮机构相比,空间凸轮机构具有体积小、结构紧凑、刚性好、转动扭矩大等优点。
直动从动件圆柱凸轮机构是一种典型的空间凸轮机构。
当凸轮转速较低、精度要求不高时,可以把圆柱凸轮看成是由移动凸轮转化而来的,按基圆半径或外圆直径展开成平面矩形,作为平面直动凸轮进行近似计算。
但是随着凸轮机构日益向高速方向发展,传统的圆柱凸轮机构的设计方法因误差较大,不得不进行修正,因为,这种展开法不能达到简化计算、提高精度的目的,不能满足企业的实际需要。
考虑到圆柱凸轮属于空间凸轮,其理论廓面、实际廓面均为空间曲面,因此,如何构造这些曲面是一个关键问题,国内开展了一些相关研究。
随着计算机辅助设计进一步发展,特别是基于特征和参数化技术的三维设计软件的出现,为空间曲面的构造提供了支撑平台。
本文来用精确的数学模型建立圆柱凸轮的实际廓线方程,基于solidwoks平台,通过二次开发的手段精确构造实际轮廓曲面,完成了圆柱凸轮的建模,通过实践证明了这种方法的可行性。
1圆柱凸轮轮廓线的数学模型对直动从动件圆柱凸轮建立如图1所示的固定坐标系,以z轴为圆柱凸轮的回转轴线,x轴与从动件处于最低位置时的轴线重合,原点为该轴线与凸轮轴线的交点,y轴分别垂直于x和z轴。
图1中的几何参数有:凸轮圆柱半径为r(rb≤r≤rbb,rb为圆柱凸轮的基圆柱半径,b为滚子厚度),滚子半径为rγ,从动件的运动规律为s(φ),其中φ为凸轮的转角。
图1圆柱凸轮的理论和实际轮廓如图1所示。
对于圆柱滚子直动从动件凸轮机构,圆柱半径为r,曲线B为圆柱凸轮的理论轮廓。
C是实际轮廓,D代表理论轮廓上的滚子圆。
根据图中所示的固定坐标系,圆柱凸轮的理论廓线方程建立如下:考虑从动件是滚子的情况,实际轮廓线是圆心位于理论廓线上滚子圆的包络线,其方程为:对于方程式(2)中的两个方程式,滚子圆的方程式为:式(3)中x,y,z为理论廓线上的坐标;xa,ya,za为滚子圆和实际廓线上的公共点坐标,也是滚子圆和实际廓线的切点坐标。

圆柱凸轮机构设计结构计算一、圆柱凸轮的几何关系计算在设计圆柱凸轮机构时,首先需要计算凸轮的几何关系。
圆柱凸轮的主要几何参数有凸轮高度、凸轮外径和跟随者的运动轨迹等。
1.凸轮高度计算:凸轮高度是指凸轮的周向高度,其取决于从动件的运动特性和受力情况。
一般情况下,凸轮高度应保证从动件在整个运动过程中不脱离凸轮。
2.凸轮外径计算:凸轮外径是指凸轮的圆周长度。
凸轮外径与凸轮半径和凸轮的周向高度有关。
凸轮外径的计算需要根据从动件的运动轨迹来确定,可以通过绘制凸轮的运动曲线图来确定凸轮外径。
3.跟随者的运动轨迹计算:跟随者的运动轨迹是指从动件在凸轮作用下所运动的路径。
跟随者的运动轨迹是由凸轮外径和凸轮的几何形状决定的。
可以通过绘制凸轮的运动曲线图来确定跟随者的运动轨迹。
二、从动件的运动特性计算在设计圆柱凸轮机构时,还需要计算从动件的运动特性,包括从动件的角速度、角加速度和运动轨迹等。
1.从动件的角速度计算:从动件的角速度是指从动件单位时间内绕凸轮中心旋转的角度。
从动件的角速度可以通过凸轮的转动速度和凸轮上的点的位置关系来计算。
2.从动件的角加速度计算:从动件的角加速度是指从动件单位时间内角速度的变化率。
从动件的角加速度可以通过凸轮的转动加速度和凸轮上点的位置关系来计算。
3.从动件的运动轨迹计算:从动件的运动轨迹是指从动件在凸轮作用下所运动的路径。
从动件的运动轨迹可以通过凸轮的几何形状和转动角度来计算。
三、受力计算在设计圆柱凸轮机构时,需要考虑凸轮和从动件的受力情况,以确保机构的安全稳定运行。
1.凸轮的受力计算:凸轮在工作过程中受到从动件的压力和惯性力的作用。
凸轮的受力计算需要考虑凸轮的材料强度和从动件的受力情况。
2.从动件的受力计算:从动件在与凸轮接触的过程中受到凸轮的压力和惯性力的作用。
从动件的受力计算需要考虑从动件的材料强度和凸轮的几何形状。
以上是圆柱凸轮机构设计结构计算的基本内容。
在实际应用中,还需要考虑其他因素,如凸轮的润滑和冷却等。

圆柱凸轮参数化建模方法研究侯青林①(中冶集团北京冶金设备研究设计总院 北京100029)摘要 Solid Works 软件具有强大的曲面、实体建模能力,利用其成熟的三维技术,结合圆柱凸轮的机构特点,分别采用三种方法实现了一种圆柱凸轮的参数化建模,并验证了此三维模型。
通过对建模方法的比较,找出了一种最简洁,灵活,实用的全参数化方法,对建立其他形式复杂圆柱凸轮参数化模型具有一定的参考价值。
关键词 Solid Works 圆柱凸轮 参数化模型Research on Param etr i c M odeli n g of Cyli n dr i ca l CamHou Q inglin(Beijing Central Research &Design I nstitute f orMetallurgical Equi pment ofMCC Gr oup,Beijing 100029)ABSTRACT Solid Works is a very powerful design s oft w are for modeling surface and s olid .By making use of its advanced three 2di m ensi onal technical,this paper adop ts three methods t o realize the para metric modeling of a cy 2lindrical ca m according its structure characteristics,and this 3D model is verified subsequently .Thr ough comparis ons of build modeling,the method of para metric modeling is very concise,flexible and p ractical,which p r ovides a refer 2ence on the para metric modeling of the other comp licated cylindrical ca m.KE YWO R D S S olid Works Cylindrical ca m Para metric model1 引言圆柱凸轮机构在机械工程领域中得到了广泛的应用,与平面凸轮机构相比,具有体积小、结构紧凑、刚性好、分度数大和传动扭矩大等优点[1]。

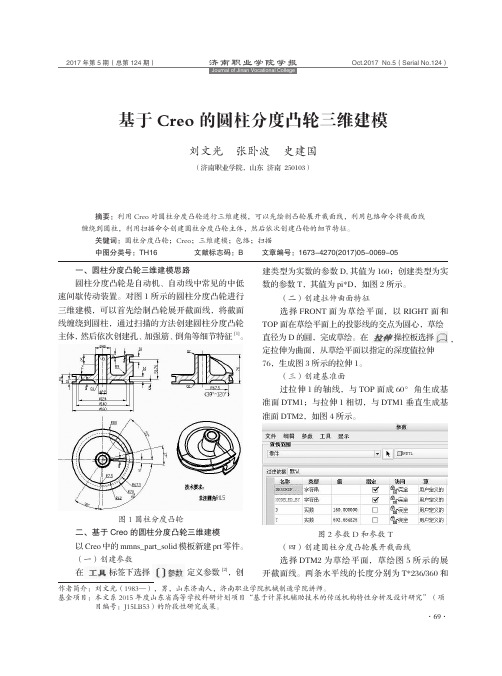
·69·基于Creo 的圆柱分度凸轮三维建模刘文光 张卧波 史建国(济南职业学院,山东 济南 250103)摘要:利用Creo 对圆柱分度凸轮进行三维建模,可以先绘制凸轮展开截面线,利用包络命令将截面线缠绕到圆柱,利用扫描命令创建圆柱分度凸轮主体,然后依次创建凸轮的细节特征。
关键词:圆柱分度凸轮;Creo;三维建模;包络;扫描中图分类号:TH16 文献标志码:B 文章编号:1673-4270(2017)05-0069-05一、圆柱分度凸轮三维建模思路圆柱分度凸轮是自动机、自动线中常见的中低速间歇传动装置。
对图1所示的圆柱分度凸轮进行三维建模,可以首先绘制凸轮展开截面线,将截面线缠绕到圆柱,通过扫描的方法创建圆柱分度凸轮主体,然后依次创建孔、加强筋、倒角等细节特征[1]。
图1 圆柱分度凸轮二、基于Creo 的圆柱分度凸轮三维建模以Creo 中的mmns_part_solid 模板新建prt 零件。
(一)创建参数在 标签下选择 定义参数[2],创建类型为实数的参数D,其值为160;创建类型为实数的参数T,其值为pi*D,如图2所示。
(二)创建拉伸曲面特征选择FRONT 面为草绘平面,以RIGHT 面和TOP 面在草绘平面上的投影线的交点为圆心,草绘直径为D 的圆,完成草绘。
在 操控板选择 设定拉伸为曲面,从草绘平面以指定的深度值拉伸76,生成图3所示的拉伸1。
(三)创建基准面过拉伸1的轴线,与TOP 面成60°角生成基准面DTM1;与拉伸1相切,与DTM1垂直生成基准面DTM2,如图4所示。
图2 参数D 和参数T(四)创建圆柱分度凸轮展开截面线选择DTM2为草绘平面,草绘图5所示的展开截面线。
两条水平线的长度分别为T*236/360和作者简介:刘文光(1983—),男,山东济南人,济南职业学院机械制造学院讲师。
基金项目:本文系2015年度山东省高等学校科研计划项目“基于计算机辅助技术的传送机构特性分析及设计研究”(项 目编号:J15LB53)的阶段性研究成果。

圆柱凸轮分度机构的设计计算及运动仿真摘要:圆柱凸轮分度机构主要用于两垂直轴间的运动。
当主动轴连续旋转运动时,从动件是装有多个滚子的转盘,可按设计要求作间歇步进分度转位运动,从而把连续旋转地输入运动形式转化为具有停歇区的分度运动输出形式。
本文主要介绍了圆柱凸轮分度机构方案的选择,理论廓线和工作廓线的计算方法。
利用c语言程序编写圆柱凸轮轨道的计算程序及利用matlab绘出凸轮轮廓曲线,同时利用三维造型软件完成主要零部件建模及利用Pro/E完成零部件装配及运动仿真。
本文还介绍了凸轮分度机构常用运动规律的主要特性比较及其使用场合,以及在设计过程中遇到的一些问题及解决方法。
关键词:圆柱凸轮分度机构,设计计算,实体建模,运动仿真1 总述1.1前言凸轮机构是使从动件作预期规律运动的高副机构。
其主要优缺点如下。
优点:○1从动件的运动规律可以任意拟定,凸轮机构可用于对从动件要求严格的地方,也可以用于要求从动件作间歇运动的地方,其运动时间与停歇时间比例以及次数都可以任意拟定。
可以高速启动,动作准确可靠。
○2只要设计相应的凸轮轮廓,就可以使从动件按拟定的规律运动。
一般中、低速凸轮的运动设计比较简单。
○3由于数控机床及计算机的广泛应用,特别是近些年来可以实现计算机辅助设计与制造使凸轮轮廓的加工并不十分困难。
缺点:○1在高副接触处难以保证良好的润滑,又因其压力较大,故容易磨损,为了保持必要的寿命,传递动力不能过大。
○2高速凸轮机构中,其高副接触处的动力学特性比较复杂,精确分析与设计都比较困难。
而在许多机械设备中,特别是自动化半自动化机械设计中,由于生产工艺的要求,往往需要机构来实现周期性的转位,分度动作以及带有瞬间停顿或停歇区的断续性运动。
这种输出曲线呈现周期性的机构称为间歇运动机构。
间歇运动机构广泛应用于机床、化工、轻工、印刷、电子、包装、食品机械、计量器具等行业。
机械运动机构种类繁多,随着科学技术的发展,加工效率的提高,高速、精密的间歇运动机构越来越多的得到使用。


利用UG进行圆柱凸轮造型设计利用UG进行圆柱凸轮造型设计 , 在常见机构中,经常会应用圆柱凸轮来实现某种工艺动作,圆柱凸轮的轮廓分布在圆柱的表面上,沿圆柱面展开后的理论轮廓曲线,实际就是推杆的位移曲线。
因此,如果已知推杆的位移曲线,就很容易画出圆柱凸轮的轮廓。
有了圆柱凸轮的轮廓,即可利用UG的某些命令来完成圆柱凸轮的建模,为后续的圆柱凸轮的数控加工提供可靠的依据。
在常见机构中,经常会应用圆柱凸轮来实现某种工艺动作,圆柱凸轮的轮廓分布在圆柱的表面上,沿圆柱面展开后的理论轮廓曲线,实际就是推杆的位移曲线。
因此,如果已知推杆的位移曲线,就很容易画出圆柱凸轮的轮廓。
有了圆柱凸轮的轮廓,即可利用UG的某些命令来完成圆柱凸轮的建模,为后续的圆柱凸轮的数控加工提供可靠的依据。
1 设计要求已知某工艺动作要求摆杆的运动规律为:当圆柱凸轮转过96。
时,摆杆等加速等减速上升72mm;圆柱凸轮继续转过1100时,摆杆停止不动;圆柱凸轮再继续转过96。
时,摆杆等加速等减速下降72mm;最后,圆柱凸轮转过剩余的58。
时,摆杆又停止不动。
圆柱凸轮的基圆半径73mm;摆杆滚子的半径为13mm;圆柱凸轮的中心孔径为30mm;圆柱凸轮的高度为140mm。
2 设计过程启动UG软件,建立一新文件名为YZtuLun的部件文件,选择【起始】/【建模】命令进入建模模块。
首先创建三基准平面。
随后调用圆柱体基本体素,建立圆柱体;其直径为158mm,高为140mm。
选择XZ坐标面,偏移79mm,与柱面相切;在此平面上完成摆杆的位移曲线的草图绘制,并将1100对应的长度152mm,左、右约束到中心,该位移曲线草图的上、下约束到圆柱高度140ram的一半(70mm)处,如图l所示。
选择【缠绕】命令将摆杆的位移曲线的草图缠绕于圆柱体的表面并桥接其首尾部的未连接部分。
在【曲线】工具条中选择【直线】命令,沿缠绕于圆柱体表面的位移曲线转折处作平行于Z轴的直线,共完成四条直线,长度只要超过圆柱高度即可。
L圆柱凸轮的建模——PROE4.0
PROESKILL
圆柱凸轮建模与盘形凸轮略有区别。
但是前面的步骤是相同的。
下面用一个实例来说明。
任务:
生成一个圆柱凸轮,外径D=200,长度L=240,滚子半径Rr=30.从动件运动规律:凸轮转角0——120度时,从动件以余弦运动规律向一端移动160;从120——150度时,从动件静止(远休止);从150——300度时,从动件以余弦运动规律向另一端移动160,回来;300——360度时,从动件又不动。
一、新建文件
大家都很熟悉,所以就不多说了。
二、生成位移曲线
操作相同,但是位移曲线就必须注意了。
1.单击(插入基准曲线),选择“从方程”,“完成”。
2.弹出如下对话框。
选择坐标系PRT_CSYS_DEF,在新弹出的【菜单管理器】中,选择【设置坐标类型/笛卡儿】。
3.输入方程。
注意:在盘形凸轮建模中,一般以转角为X轴,范围0——360,从动件位移为Y轴。
但是在此,我们将圆柱凸轮展开,可以看成一个长方体,这样凸轮的沟槽就自动呈现在我们眼前,这沟槽就是我们要的位移曲线。
因此,位移曲线是这样的:X轴范围为0——PI*D,也就是底面圆的周长。
Y轴仍然是从动件位移。
STEP1
现在我们来输入推程段(转角0——120)的方程:
说明:X的方程中,100是半径,是转角。
由于底面圆展开成横轴X,因此X
即为弧长(为半径乘以转角),即为。
STEP2
点击记事本的【文件/保存】,然后退出。
点击【曲线:从方程】中的【确定】。
产生如图的曲线。
同理可以输入另外三段曲线方程,这里不重复说明,例如远休止段(120——150)为:
150——300段:
300——360段:
最终生成结果如图:
4.保存为IGES格式。
确定,弹出下面的对话框,做出如图的选择,确定,完成IGES副本的保存。
三、生成凸轮凹槽
1.拉伸出基体
大家都很熟悉,故不详述了。
(1)
(2)绘制一个矩形。
(3)工具——关系
确定,此时尺寸将发生变化。
如下图所示。
确定退出草绘。
(4)设置拉伸深度。
由于圆柱半径为100,因此拉深深度100。
结果如下。
2.扫描切除出沟槽
大家也很熟悉,故简略。
(1)插入——扫描——切口——选取轨迹
(2)
选择位移曲线作为轨迹。
如下图。
依次选择:完成——正向——自由端点——完成,绘制扫描截面。
(3)
绘制截面如图,图形对称,矩形尺寸30X40。
然后退出草绘。
(4)选择”正向“——确定。
扫描结果如下:
四、环形折弯
1.属性设置:
插入——高级——环形折弯360——曲线折弯收缩——完成
2.定义折弯对象
选择拉伸的实体和上表面作为折弯对象(实体可以在模型树选)。
如下图所示。
3.
选择表面A为草绘面,单击”正向“,其余默认,选择”缺省“,进入草绘。
A
以上红字部分我觉得应该有误。
以该必须选取下图所示范的平面为顶部。
另外,在PRE4.0里面,会多出以下几个步骤,我搞了半天才搞出了,发上来,省得跟我一样的童鞋又重走一遍弯路
草绘——参照,选择参照如图1。
单击草绘器工具栏的创建参照坐标系。
绘制一条直线作为弯曲轨迹。
坐标系位置和直线情况如图1。
草绘环境
参照和坐标系
直线
单击退出草绘。
体统弹出一下对话框:
左下角提示:
选取下图所示平面
双击鼠标中键,弹出一下对话框
点“添加”,又跳出下面这个对话框
这时选下图所示平面。
然后点中键确认。
结果如图。
祝大家愉快!。