MG995945995舵机的参考资料剖析
- 格式:docx
- 大小:399.57 KB
- 文档页数:12
mg995舵机控制Chapter 1: IntroductionThe MG995 servo is a widely used motor in robotic systems due to its high torque, accuracy, and reliability. This chapter provides an overview of the significance and objectives of this paper, along with an introduction to the MG995 servo.1.1 Significance of the StudyThe MG995 servo has gained popularity in various robotic applications, including robotics arm, autonomous vehicles, and aerial drones. Its precise control and robust construction make it suitable for a wide range of tasks. Understanding the principles of controlling the MG995 servo is crucial for designing efficient and reliable robotic systems.1.2 ObjectivesThe objective of this paper is to explore the control methods and principles of the MG995 servo. By delving into the technical aspects and capabilities of this servo, we can gain insights into its potential applications and improve the overall performance of robot systems.Chapter 2: MG995 Servo MechanicsIn this chapter, we focus on the internal mechanics of the MG995 servo. Understanding its structure and principles of operation helps in comprehending its unique control requirements.2.1 Internal StructureThe MG995 servo consists of a DC motor, gears, a potentiometer, and a control circuit. The gear reduction system enhances torquewhile preserving accuracy. The potentiometer provides feedback to the control circuit, allowing for precise position control.2.2 Principles of OperationWhen a control signal is supplied to the MG995 servo, the control circuit adjusts the current flowing through the DC motor. This current, combined with the gear reduction system, generates the desired output torque. The potentiometer provides feedback on the servo's position, allowing for closed-loop control.Chapter 3: Control Methods for MG995 ServoThis chapter focuses on various control methods and techniques used to operate the MG995 servo effectively. We explore both open-loop and closed-loop control approaches.3.1 Open-Loop ControlOpen-loop control involves sending a specific control signal to move the servo to a predetermined position. However, due to external factors such as friction and load variations, open-loop control may result in positional errors. Nevertheless, it is suitable for simple applications where precise positioning is not critical. 3.2 Closed-Loop ControlClosed-loop control incorporates feedback from the potentiometer to continuously adjust the control signal until the desired position is achieved. Proportional-Integral-Derivative (PID) control is a commonly used technique in closed-loop control for MG995 servos. It allows for accurate and stable position control, compensating for external disturbances.Chapter 4: Applications and Future DirectionsThis final chapter discusses the practical applications of MG995 servos in various fields and identifies potential areas for future research and development.4.1 ApplicationsThe MG995 servo finds applications in robotics arms, walking robots, humanoid robots, autonomous vehicles, and aerial drones. It offers precise actuation, enabling these systems to perform complex tasks with high accuracy and reliability.4.2 Future DirectionsFuture research can focus on improving the MG995 servo's performance by exploring advanced control techniques, reducing positional errors, enhancing communication interfaces, and minimizing power consumption. Additionally, exploring the integration of MG995 servos with advanced artificial intelligence algorithms can enable more sophisticated and intelligent robotic systems.In conclusion, the MG995 servo is a versatile and high-performance motor widely used in robotics. This paper provides an overview of its mechanics, control methods, and potential applications. Understanding the control principles of the MG995 servo is crucial for designing efficient and reliable robotic systems. With further advancements, the MG995 servo holds immense potential to revolutionize the field of robotics.Chapter 1: Introduction1.1 Significance of the StudyThe MG995 servo is a crucial component in various fields of robotics, including industrial robotics, humanoid robots, and autonomous vehicles. Understanding the control methods and principles of the MG995 servo is significant as it allows researchers and engineers to optimize its performance, improve the accuracy of robotic systems, and enable them to perform complex tasks efficiently.1.2 ObjectivesThe objective of this paper is to delve into the technical aspects and capabilities of the MG995 servo. By exploring its internal mechanics and control methods, we can gain insights into its potential applications and provide guidelines for efficient and reliable integration of the servo into robotic systems. This paper aims to provide a comprehensive understanding of the MG995 servo, its control principles, and its role in the advancement of robotics.Chapter 2: MG995 Servo Mechanics2.1 Internal StructureThe internal structure of the MG995 servo consists of several key components. These include a DC motor, gear system, potentiometer, and control circuit. The DC motor is responsible for generating the necessary torque to drive the servo's movement. The gear system provides torque amplification and precise motion transmission. The potentiometer serves as a feedback device, constantly measuring the position of the servo, allowing for accurate control. The control circuit processes the control signal and adjusts the electrical current to the motor accordingly.2.2 Principles of OperationThe MG995 servo operates based on the principles of electrical and mechanical systems. When a control signal is applied to the servo, the control circuit adjusts the electrical current flowing through the motor coils. This current generates a magnetic field that interacts with the permanent magnet inside the motor, resulting in rotational motion. The gear system amplifies the torque generated by the motor, allowing for precise movement control. The potentiometer provides position feedback to the control circuit, enabling closed-loop control.Chapter 3: Control Methods for MG995 Servo3.1 Open-Loop ControlOpen-loop control is a basic control method where a control signal is sent to the servo without considering feedback from the potentiometer. While open-loop control is simple to implement, it may result in positional errors due to external factors such as friction and load variations. This control method is suitable for applications where precise positioning is not critical, such as controlling the opening and closing of a robot gripper or adjusting the orientation of a camera.3.2 Closed-Loop ControlClosed-loop control incorporates feedback from the potentiometer, allowing for more accurate position control. Proportional-Integral-Derivative (PID) control is a commonly used technique in closed-loop control for MG995 servos. It continuously adjusts the control signal based on the difference between the desired position and theactual position measured by the potentiometer. By taking into account the history of error and the rate of change, PID control ensures stability and improves the servo's response to external disturbances.Chapter 4: Applications and Future Directions4.1 ApplicationsThe MG995 servo has countless applications in the field of robotics. Its high torque and accurate control make it suitable for tasks that require precise movement and manipulation. In industrial robotics, the MG995 servo can be used to control robotic arms for assembly, handling, and welding operations. In the field of humanoid robotics, it can be employed to control the joints of humanoid robots, enabling them to mimic human movements. Furthermore, in autonomous vehicles and aerial drones, theMG995 servo can be used to control steering mechanisms, camera gimbals, and flight control surfaces.4.2 Future DirectionsFuture research and development of the MG995 servo can focus on several areas. Firstly, advanced control techniques can be explored to improve its performance, such as adaptive control algorithms and nonlinear control methods. Secondly, efforts can be made to reduce positional errors by enhancing the mechanical design and minimizing backlash in the gear system. Additionally, improving communication interfaces and integrating the MG995 servo with advanced artificial intelligence algorithms can enhance its capabilities and enable more sophisticated and intelligent robotic systems. Moreover, research can be conducted to optimize powerconsumption and develop energy-efficient control strategies for the servo.In conclusion, the MG995 servo is a versatile and high-performance motor widely used in robotics. This paper has provided an overview of its internal mechanics, control methods, and potential applications. By understanding the principles of controlling the MG995 servo, researchers and engineers can optimize its performance, improve the accuracy of robotic systems, and enable more efficient and reliable task execution. With further advancements and developments, the MG995 servo holds immense potential to contribute to the advancement of robotics in various fields.。
mg995舵机中文资料(参数_尺寸_控制程序)
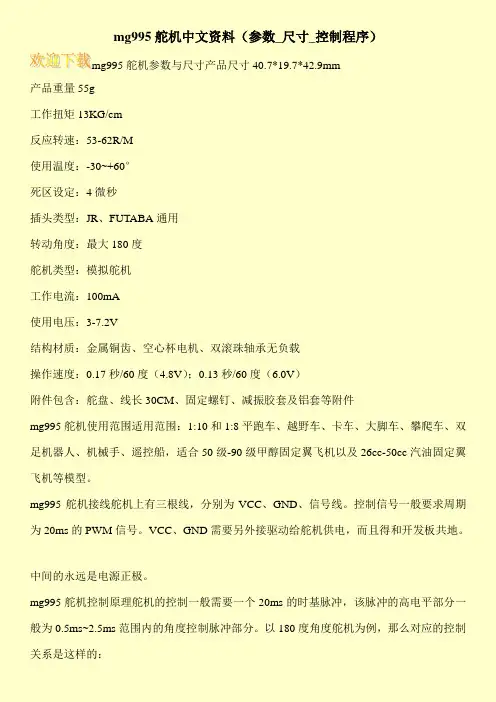
mg995舵机参数与尺寸产品尺寸40.7*19.7*42.9mm
产品重量55g
工作扭矩13KG/cm
反应转速:53-62R/M
使用温度:-30~+60°
死区设定:4微秒
插头类型:JR、FUTABA通用
转动角度:最大180度
舵机类型:模拟舵机
工作电流:100mA
使用电压:3-7.2V
结构材质:金属铜齿、空心杯电机、双滚珠轴承无负载
操作速度:0.17秒/60度(4.8V);0.13秒/60度(6.0V)
附件包含:舵盘、线长30CM、固定螺钉、减振胶套及铝套等附件
mg995舵机使用范围适用范围:1:10和1:8平跑车、越野车、卡车、大脚车、攀爬车、双足机器人、机械手、遥控船,适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型。
mg995舵机接线舵机上有三根线,分别为VCC、GND、信号线。
控制信号一般要求周期为20ms的PWM信号。
VCC、GND需要另外接驱动给舵机供电,而且得和开发板共地。
中间的永远是电源正极。
mg995舵机控制原理舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:。
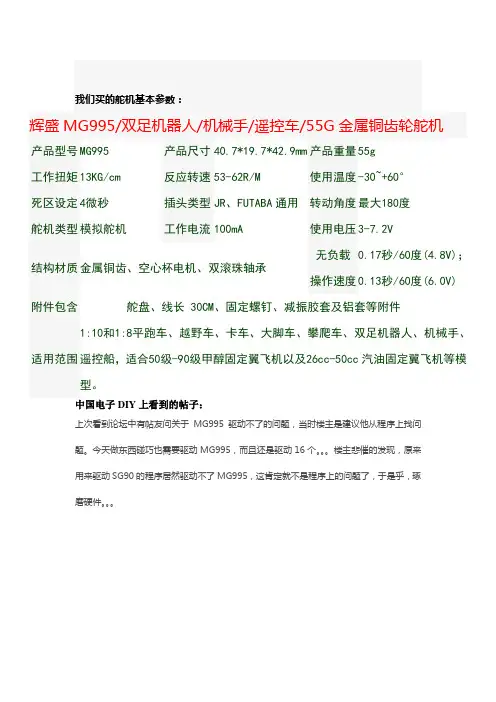
我们买的舵机基本参数:辉盛MG995/双足机器人/机械手/遥控车/55G金属铜齿轮舵机产品型号MG995产品尺寸40.7*19.7*42.9mm产品重量55g工作扭矩13KG/cm反应转速53-62R/M使用温度-30~+60°死区设定4微秒插头类型JR、FUTABA通用转动角度最大180度舵机类型模拟舵机工作电流100mA使用电压3-7.2V结构材质金属铜齿、空心杯电机、双滚珠轴承无负载操作速度0.17秒/60度(4.8V);0.13秒/60度(6.0V)附件包含舵盘、线长 30CM、固定螺钉、减振胶套及铝套等附件适用范围1:10和1:8平跑车、越野车、卡车、大脚车、攀爬车、双足机器人、机械手、遥控船,适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型。
中国电子DIY上看到的帖子:上次看到论坛中有帖友问关于MG995驱动不了的问题,当时楼主是建议他从程序上找问题。
今天做东西碰巧也需要驱动MG995,而且还是驱动16个。
楼主悲催的发现,原来用来驱动SG90的程序居然驱动不了MG995,这肯定就不是程序上的问题了,于是乎,琢磨硬件。
mg995经过一番资料查找,最后确定问题是出在单片机的驱动信号上,众所周知,单片机本身驱动能力是很差的,因此,当遇到MG995这种功率较大的舵机,其输出的控制信号就有点不给力了。
原本想着单片机输出的信号只要符合PWM要求即可,没想到还涉及一个“能力”问题。
解决方法也很简单,信号端加上拉电阻即可!楼主用的是7.4V锂聚合物电池供电,如下图所示(略)由于从网上了解的资料不尽相同,不确定MG995的电压范围,因而采用了3种供电方案:1.用7805稳压供电由于7805输出电流有限,而MG995又对电流要求较高,经过实测,一个7805驱动3个MG995时就会明显发热,驱动4个时,你摸下试试。
反正把我烫了一下。
唉,谁叫我没加散热片呢2.加一个1N5819,利用其导通压降来进行降压3.直接用7.4V。
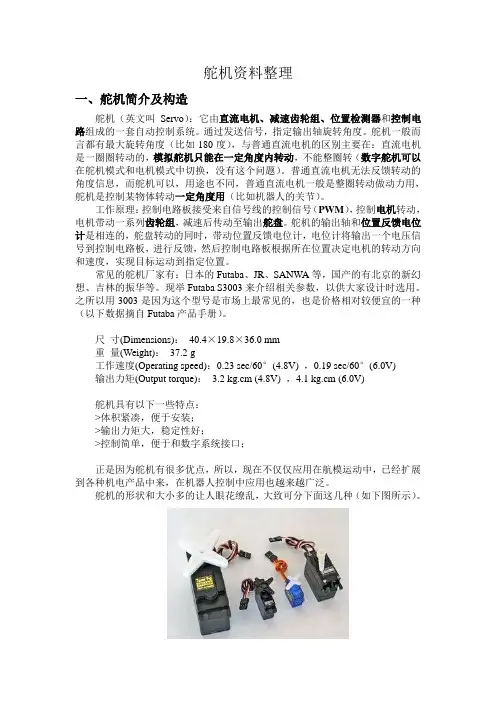
舵机资料整理一、舵机简介及构造舵机(英文叫Servo):它由直流电机、减速齿轮组、位置检测器和控制电路组成的一套自动控制系统。
通过发送信号,指定输出轴旋转角度。
舵机一般而言都有最大旋转角度(比如180度),与普通直流电机的区别主要在:直流电机是一圈圈转动的,模拟舵机只能在一定角度内转动,不能整圈转(数字舵机可以在舵机模式和电机模式中切换,没有这个问题)。
普通直流电机无法反馈转动的角度信息,而舵机可以,用途也不同,普通直流电机一般是整圈转动做动力用,舵机是控制某物体转动一定角度用(比如机器人的关节)。
工作原理:控制电路板接受来自信号线的控制信号(PWM),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,实现目标运动到指定位置。
常见的舵机厂家有:日本的Futaba、JR、SANWA等,国产的有北京的新幻想、吉林的振华等。
现举Futaba S3003来介绍相关参数,以供大家设计时选用。
之所以用3003是因为这个型号是市场上最常见的,也是价格相对较便宜的一种(以下数据摘自Futaba产品手册)。
尺寸(Dimensions):40.4×19.8×36.0 mm重量(Weight):37.2 g工作速度(Operating speed):0.23 sec/60°(4.8V) ,0.19 sec/60°(6.0V)输出力矩(Output torque):3.2 kg.cm (4.8V) ,4.1 kg.cm (6.0V)舵机具有以下一些特点:>体积紧凑,便于安装;>输出力矩大,稳定性好;>控制简单,便于和数字系统接口;正是因为舵机有很多优点,所以,现在不仅仅应用在航模运动中,已经扩展到各种机电产品中来,在机器人控制中应用也越来越广泛。
舵机的工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为 1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
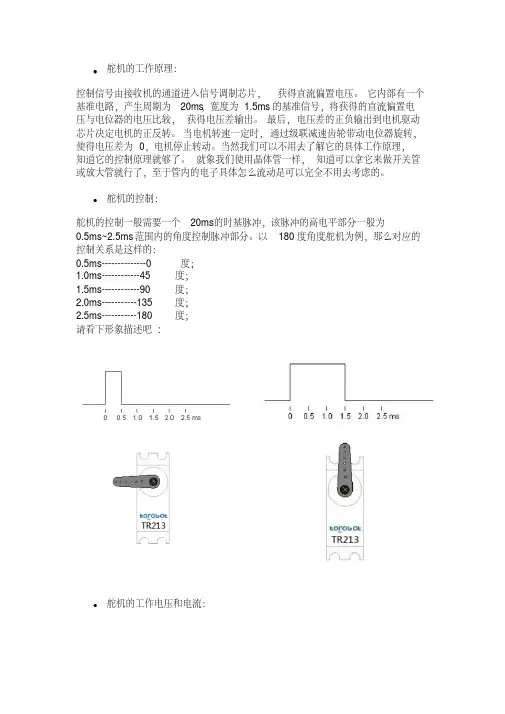
舵机的控制:舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;请看下形象描述吧:舵机的工作电压和电流:每一款舵机都有自己的参数,如TR213舵机的工作电压是 4.8-7.2V,TR205舵机的工作电压是 4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。
六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
舵机三根线的区分:信号线接单片机I/O口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O口直接控制;电源正极,接输入电源的正极;地线,接输入电源的负极;备注:如果控制部分和电源部分是分开的,两者一定要共地。

TowerPro 辉盛舵机详细资料SERVO Series Rcommend for modelSG50,SG90 for Helicopter,3D-flyer,F3A;MG995,MG945,SG5010 for Gasoline engine plane, train-flyer ;9805BB forSG50 重量- 6.3g尺寸21.5x11.7x25.1mm力矩0.6kg/cm速度0.3sec/60degree(4.8v)工作电压 4.2-6V温度范围0℃_ 55℃带宽10usSG90 重量- 10g尺寸23x12.2x29mm力矩 1.5kg/cm速度0.3sec/60degree(4.8v)工作电压 4.2-6V温度范围0℃_ 55℃带宽10usMG945 重量- 55.0g尺寸40.7*19.7*42.9mm力矩12kg/cm速度0.25sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usMG995 重量- 55.0g尺寸40.7*19.7*42.9mm力矩10kg/cm速度0.20sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usSG5010 重量- 38g尺寸40.2x20.2x43.2mm力矩 3.1kg/cm(4.8V); 4.5kg/cm(6V);速度0.17sec/60degree(4.8v); 0.4sec/60degree(6v)工作电压4.8-6V温度范围0℃_ 55℃带宽20us9805BB 重量- 160g尺寸66x30.2x64.4mm力矩20kg/cm(6V)速度0.20sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usFUT ABA舵机参数大全S9150 Digital servo■尺寸:47.5X27X25.3mm■重量:53g■速度:0.18sec/60"(4.8V)■扭力:5.8kg:cm(4.8V)——————————————————————————S9151 Digital servo■尺寸:40X20X36.6mm■重量:50g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V)——————————————————————————S9206■尺寸:40.5X20X37.5mm■重量:53g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V) ——————————————————————————S9601■尺寸:31X16X30.2mm■重量:31g■速度:0.15sec/60"(4.8V)■扭力:2.4g:cm(4.8V) ——————————————————————————S9250 Digital servo■尺寸:40.5X20X37.5mm■重量:54g■速度:0.11sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S9253 Digital servo■尺寸:40X20X36.6mm■重量:49g■速度:0.08sec/60"(4.8V)■扭力:2.0kg:cm(4.8V) ——————————————————————————S3103■尺寸:21.8X11X19.8mm■重量:9.5g■速度:0.11sec/60"(4.8V)■扭力:1.2kg:cm(4.8V) ——————————————————————————S3102■尺寸:28X13X29.7mm■重量:21g■速度:0.25sec/60"(4.8V)■扭力:3.7kg:cm(4.8V) ——————————————————————————S9450 Digital servo■尺寸:40.5X20X37.5mm■重量:55g■速度:0.10sec/60"(4.8V)■扭力:8.0kg:cm(4.8V) ——————————————————————————S9251 Digital servo■尺寸:40X20X36.6mm■重量:57g■速度:0.07sec/60"(4.8V)■扭力:3.7kg:cm(4.8V) ——————————————————————————S3101■尺寸:28X13X29.3mm■重量:17g■速度:0.18sec/60"(4.8V)■扭力:2.5kg:cm(4.8V) ——————————————————————————S3002■尺寸:31X16X30.2mm■重量:35g■速度:0.20sec/60"(4.8V)■扭力:3.3g:cm(4.8V) ——————————————————————————S9252 Digital servo■尺寸:40.5X20X36.6mm■重量:50g■速度:0.14sec/60"(4.8V)■扭力:6.6kg:cm(4.8V) ——————————————————————————S9101■尺寸:38.5X19.5X34.5mm■重量:45g■速度:0.16sec/60"(4.8V)■扭力:3.1kg:cm(4.8V) ——————————————————————————S135■尺寸:31X16X29.7mm■重量:29.5g■速度:0.15sec/60"(4.8V)■扭力:1.9g:cm(4.8V) ——————————————————————————S9102■尺寸:44.7X22.6X26mm■重量:46g■速度:0.13sec/60"(4.8V)■扭力:3.6kg:cm(4.8V) ——————————————————————————S9202■尺寸:40X20X35.5mm■重量:50g■速度:0.22sec/60"(4.8V)■扭力:5.0kg:cm(4.8V) ——————————————————————————S9001■尺寸:40.4X19.8X36mm■重量:48g■速度:0.18sec/60"(6V)■扭力:5.2kg:cm(6V) ——————————————————————————S3802■尺寸:44X23X43mm■重量:72g■速度:0.56sec/60"■扭力:11.0kg:cm ——————————————————————————S9602■尺寸:36X15X30.7mm■重量:31g■速度:0.09sec/60"(4.8V)■扭力:2.7g:cm(4.8V) ——————————————————————————S9203■尺寸:40.5X20X37.5mm■重量:53g■速度:0.11sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S136G 收轮专用■尺寸:45.2X22.7X25.4mm■重量:42g■速度:0.50sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S3801■尺寸:59.2X28.8X49.8mm■重量:107g■速度:0.26sec/60"■扭力:14.0kg:cm ——————————————————————————S9404■尺寸:39X20X37.4mm■重量:55g■速度:0.11sec/60"■扭力:5.7kg:cm ——————————————————————————S9204■尺寸:40.5X20X37.5mm■重量:53g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V) ——————————————————————————S135C■尺寸:31X16X30.2mm■重量:29g■速度:0.15sec/60"(4.8V)■扭力:1.9g:cm(4.8V) ——————————————————————————S5301■尺寸:59.2X28.8X49.8mm■重量:125g■速度:0.23sec/60"■扭力:21.0kg:cm ——————————————————————————S9402■尺寸:40.5X20X37.4mm■重量:55g■速度:0.10sec/60"■扭力:8.0kg:cm ——————————————————————————S3003■尺寸:40.4X19.8X36mm■重量:37.2g■速度:0.19sec/60"(6V)■扭力:4.1kg:cm(6V) ——————————————————————————S5801■尺寸:46X25X44mm■重量:83g■速度:0.5sec/60"(7.2V)■扭力:9.8kg:cm(7.2V) ——————————————————————————S3302■尺寸:59.2X28.8X49.8mm■重量:103g■速度:0.19sec/60"■扭力:8.0kg:cmHitec舵机模拟舵机HS-45HB■重量:8g■尺寸:23.6×9.8×22.4mm■拉力:[4.8V] 1.0Kg.cm■转速:[4.8V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-50■重量:6.4g■尺寸:20.9×11.4×22mm■拉力:[4.8V] 0.6Kg.cm■转速:[4.8V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升HS-55■重量:8g■尺寸:22.8×11.6×24mm■拉力:[4.8V] 1.1Kg.cm■拉力:[6.0V] 1.3Kg.cm■转速:[4.8V] 0.17sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-56HB■重量:10.7g■尺寸:22.6×11.6×24mm■拉力:[4.8V] 1.0Kg.cm■拉力:[6.0V] 1.2Kg.cm■转速:[4.8V] 0.12sec/60°■转速:[6.0V] 0.10sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-65HB■重量:11.9g■尺寸:23.6×11.6×24mm■拉力:[4.8V] 1.8Kg.cm■拉力:[6.0V] 2.2Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-65MG■重量:11.9g■尺寸:23.6×11.6×24mm■拉力:[4.8V] 1.8Kg.cm■拉力:[6.0V] 2.2Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车小型模拟舵机HS-77BB■重量:35g■尺寸:44×23×25mm■拉力:[4.8V] 6.6Kg.cm■拉力:[6.0V] 8.2Kg.cm■转速:[4.8V] 0.45c/60°■转速:[6.0V] 0.34sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模HS-81■重量:16.6g■尺寸:29.8×12×29.6mm■拉力:[4.8V] 2.6Kg.cm■拉力:[6.0V] 3Kg.cm■转速:[4.8V] 0.11sec/60°■转速:[6.0V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-82MG■重量:19g■尺寸:29.8×12×29.6mm■拉力:[4.8V] 2.6Kg.cm■拉力:[6.0V] 3Kg.cm■转速:[4.8V] 0.11sec/60°■转速:[6.0V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-85BB+■重量:19.2g■尺寸:29×13×30mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.16sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型船HS-85MG+■重量:21.9g■尺寸:29×13×30mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.16sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-225BB■重量:27g■尺寸:32.4×16.8×31mm■拉力:[4.8V] 3.9Kg.cm■拉力:[6.0V] 4.8Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-225MG■重量:31g■尺寸:32.4×16.8×31mm■拉力:[4.8V] 3.9Kg.cm■拉力:[6.0V] 4.8Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船标准模拟舵机HS-311■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-322HD■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-325HB■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 3.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-475HB■重量:40g■尺寸:38.8×19.8×36mm■拉力:[4.8V] 4.4Kg.cm■拉力:[6.0V] 5.5Kg.cm■转速:[4.8V] 0.23sec/60°■转速:[6.0V] 0.18sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-422■重量:45.5g■尺寸:40.6×19.8×36.6mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 4.1Kg.cm■转速:[4.8V] 0.21sec/60°■转速:[6.0V] 0.16sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-425BB■重量:45.5g■尺寸:40.6×19.8×36.6mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 4.1Kg.cm■转速:[4.8V] 0.21sec/60°■转速:[6.0V] 0.16sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船标准高性能模拟舵机HS-625MG■重量:55.2g■尺寸:40.6×19.8×37.8mm■拉力:[4.8V] 5.5Kg.cm■拉力:[6.0V] 6.8Kg.cm■转速:[4.8V] 0.18sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车HS-635HB■重量:50g■尺寸:40.6×19.8×38.8mm■拉力:[4.8V] 5Kg.cm■拉力:[6.0V] 6Kg.cm■转速:[4.8V] 0.18sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模HS-645MG■重量:55.2g■尺寸:40.6×19.8×37.3mm■拉力:[4.8V] 7.7Kg.cm■拉力:[6.0V] 9.6Kg.cm■转速:[4.8V] 0.24sec/60°■转速:[6.0V] 0.20sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车、小型船HS-965MG■重量:62g■尺寸:40×20×37mm■拉力:[4.8V] 7.4Kg.cm■拉力:[6.0V] 9.5Kg.cm■转速:[4.8V] 0.13sec/60°■转速:[6.0V] 0.10sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型越野车、小型船HS-985MG■重量:62g■尺寸:40×20×37mm■拉力:[4.8V] 9.6Kg.cm■拉力:[6.0V] 12.4Kg.cm■转速:[4.8V] 0.16sec/60■转速:[6.0V] 0.13sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型越野车、小型船专业模拟舵机HS-125MG■重量:24g■尺寸:30×10×34mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.17sec/60°■转速:[6.0V] 0.13sec/60°■推荐用途:竞赛滑翔机、轻量飞机(机翼)HS-755MG■重量:117g■尺寸:59×29×50mm■拉力:[4.8V] 12Kg.cm■拉力:[6.0V] 14.4Kg.cm■转速:[4.8V] 0.28sec/60°■转速:[6.0V] 0.23sec/60°■推荐用途:竞赛滑翔机、小型车模、小型越野车、小型船HS-755HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 0.28sec/60°■转速:[6.0V] 0.23sec/60°■推荐用途:竞赛滑翔机、小型船HS-75BB■重量:35g■尺寸:44×23×25mm■拉力:[4.8V] 6.6Kg.cm■拉力:[6.0V] 8.2Kg.cm■转速:[4.8V] 0.45sec/60°■转速:[6.0V] 0.34sec/60°■推荐用途:竞赛滑翔机、轻量飞机HS-765HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 1.68sec/60°■转速:[6.0V] 1.38sec/60°■推荐用途:帆船■回转角度:140°-210°HS-785HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 1.68sec/60°■转速:[6.0V] 1.38sec/60°■推荐用途:帆船收索机■最大回转角底1890°(5 1/4回转)HS-805BB+■重量:152g■尺寸:66×30×57.6mm■拉力:[4.8V] 19.8Kg.cm■拉力:[6.0V] 24.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、小型车模、小型越野车、小型船HS-815BB■重量:152g■尺寸:66×30×57.6mm■拉力:[4.8V] 19.8Kg.cm■拉力:[6.0V] 24.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:小型帆船■回转角度:140°-210°舵机选择方案。
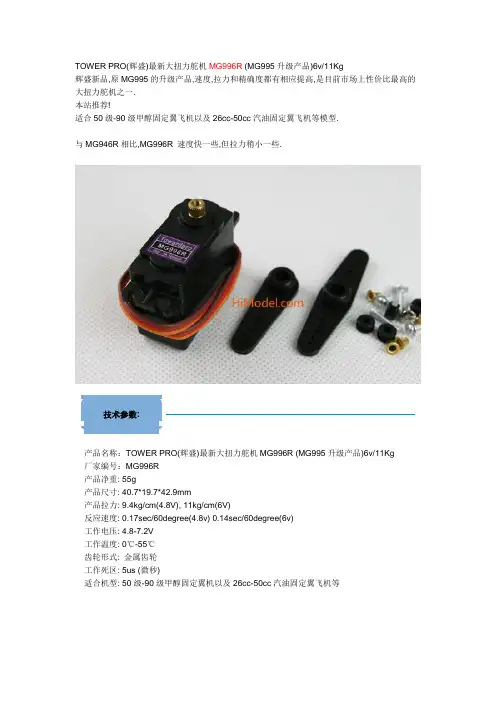
TOWER PRO(辉盛)最新大扭力舵机MG996R (MG995升级产品)6v/11Kg辉盛新品,原MG995的升级产品,速度,拉力和精确度都有相应提高,是目前市场上性价比最高的大扭力舵机之一.本站推荐!适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型.与MG946R相比,MG996R 速度快一些,但拉力稍小一些.技术参数:产品名称:TOWER PRO(辉盛)最新大扭力舵机MG996R (MG995升级产品)6v/11Kg 厂家编号:MG996R产品净重: 55g产品尺寸: 40.7*19.7*42.9mm产品拉力: 9.4kg/cm(4.8V), 11kg/cm(6V)反应速度: 0.17sec/60degree(4.8v) 0.14sec/60degree(6v)工作电压: 4.8-7.2V工作温度: 0℃-55℃齿轮形式: 金属齿轮工作死区: 5us (微秒)适合机型: 50级-90级甲醇固定翼机以及26cc-50cc汽油固定翼飞机等TOWER PRO(辉盛)最新大扭力标准金属齿舵机MG946R (MG945升级产品)6v/13Kg辉盛新品,原MG945的升级产品,速度,拉力和精确度都有相应提高,是目前市场上性价比最高的大扭力舵机之一.本站推荐!适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型.技术参数:产品名称:TOWER PRO(辉盛)最新大扭力舵机MG946R (MG945升级产品)6v/13Kg 厂家编号:MG946R产品净重: 55g产品尺寸: 40.7*19.7*42.9mm产品拉力: 10.5kg/cm(4.8V),13kg/cm(6V)反应速度: 0.20sec/60degree(4.8v)0.17sec/60degree(6.0v)工作电压: 4.8-7.2V工作温度: 0℃-55℃齿轮形式: 金属齿轮工作死区: 5us (微秒)适合机型: 50级-90级甲醇固定翼机以及26cc-50cc汽油固定翼飞机等[902-0003-001] DYNAMIXEL AX-12A■注意** 为了强化内部结构,外部形态部分变更(AX-12A Gear Set/SKU No. 902-0087-001),和AX-12+(SKU No. 903-0087-000)不能互换。
舵机技术参数范文1.尺寸和重量:舵机的尺寸和重量直接影响到其在机械装置中的安装和运行条件。
舵机的尺寸通常以毫米(mm)为单位给出,重量以克(g)为单位给出。
2.工作范围(旋转角度):舵机的工作范围是指舵机可以旋转的最大角度。
通常,舵机的工作范围为从0度到180度,也有部分舵机可以旋转更大范围或者更小范围。
3.转速:舵机的转速是指舵机转动到指定位置所需的时间。
它通常以毫秒(ms)为单位给出,数值越小表示转速越快。
4.扭力:舵机的扭力是指舵机能够输出的最大力矩或转矩。
扭矩通常以千克厘米(kg·cm)为单位给出。
5.精度:舵机的精度是指舵机在控制下转动到指定位置的准确度。
一般来说,精度越高,舵机的转动位置越准确。
6.电流:舵机的工作电流是指舵机在正常运行时所需的电流。
通常以毫安(mA)为单位给出。
根据具体舵机的不同,工作电流可能会有不同的取值范围。
7.电压:舵机的工作电压是指舵机正常运行所需的电压。
一般来说,舵机的工作电压为直流电压,通常是在4.8伏特(V)到6伏特(V)之间。
8.控制方式:舵机的控制方式有多种,常见的包括PWM(脉冲宽度调制)控制、串口控制、模拟控制等。
不同的控制方式适用于不同的应用场景。
9.噪声:舵机在工作时会产生一定的噪声,噪声大小取决于舵机的结构和质量。
一般来说,噪声越小,舵机的工作环境越安静。
10.信号线数量:舵机一般有三根信号线,分别是电源线、地线和控制信号线。
其中,电源线和地线用于提供电源给舵机,控制信号线用于接收控制信号。
舵机测试报告经过这段时间对舵机的测试,我现在将测试舵机的一些成果和心得记录下来。
以下未必是舵机可能出现的所有问题,但已经可以对实验室现有的舵机进行充分利用。
一、舵机的原理控制信号由接受通道进入调制芯片,获得直流偏置电压。
它内部含有一个基准电路,产生周期为20ms,宽度为1.5ms的基准电压,将获得的直流偏置电压与电位器的电压比较,获得电压输出。
最后电压差的正负输出到电机驱动芯片,决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压为0,电机停止转动。
以180°角度舵机为例,舵机的控制需要制作20ms周期的时基脉冲,用以和舵机内部基准电压作比较,该脉冲的高电平部分一般为0.5ms到2.5ms范围内的角度控制脉冲部分。
以1.5ms为0°标定,即0.5ms为-90°,1.0ms为-45°,1.5ms为0°,2ms为45°,2.5ms 为90°。
但实际舵机大部分并非180°范围,这里使用180°范围是为了方便举例,建议实际使用时角度控制为0°范围正负60°内,即120°范围内使用舵机。
很多舵机的位置等级有1024个,如果舵机的有效角度范围为180°,其控制的角度精度可以达到180°/1024约为0.18°,即要求的脉宽控制精度为2000/1024us约2us。
由于单片机采用定时器中断模拟PWM信号输出,单片机无法达到2us的控制精度,本报告采用两种单片机,控制角度精度为别达到9°和0.9°,稍后会有介绍二、舵机控制PWM脉宽调制值的设定设所选单片机的晶振频率为fosc,AT89S52单片机机的T=12/fosc,定时器中断采用方式2,8位自动重装定时器,定位100us 中断一次,初值等于100/T。
在定时器中断服务程序中使用两个全局变量,一个变量控制高电平时间,一个变量控制低电平时间,两个变量的和为20*1000/100=200,控制PWM脉宽即控制这两个变量的值。
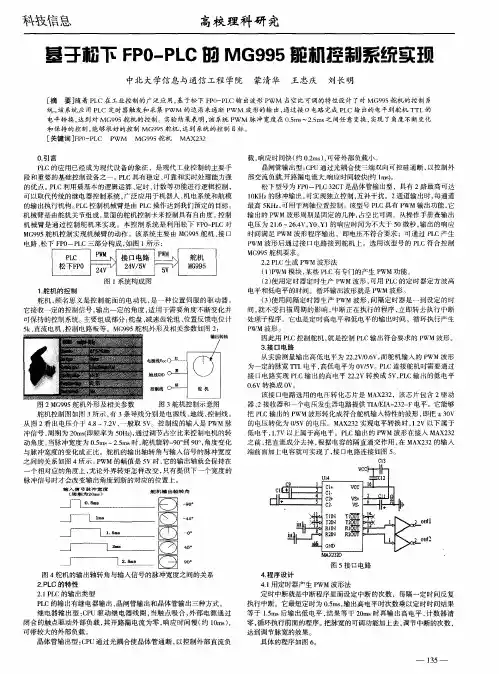
基于STM32的机械臂驱动系统设计摘要由于机械臂在各行各业中得到了愈来愈广泛的应用,机械臂控制的多样化、复杂化的需要也随之日趋增多。
作为当今科技领域研究的一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有着十分重要的意义。
本课题主要对四自由度机械臂控制系统进行了研究与设计。
作为运动控制系统的一种,该控制系统主要面向底层,力争开发出一套稳定性高,可靠性强并且定位准确的工业机械臂系统。
首先根据机械臂系统的控制要求,整体上设计出单CPU 的系统控制方案,即通过控制主控制器输出的PWM 波的占空比实现对舵机转动的控制,进而实现各个关节的位置控制。
在硬件方面,主要论述了如何以ARM 微处理器STM32F103ZET6、MG995舵机、MG945舵机、超声波传感器和电源模块为主要器件,通过搭建硬件平台和设计软件控制程序构建关节运动控制系统。
然后按照结构化设计的思想,依次对以上各部分的原理和设计方法进行了分析和探讨,给出了实际的原理图和电路图。
在软件设计方面,按照模块化的设计思想将控制程序分为初始化模块和运行模块,并分别对各个模块的程序进行设计。
实验表明,该机械臂控制系统不仅具有很好的控制精度,还具有很好的稳定性、准确性,而且在很大程度上改善了定位精度。
关键词:四自由度机械臂,STM32,Cortex-M3,脉冲宽度调制the Design of Manipulator Drive System Based on STM32AbstractIn recent years, robot arm is widely used in industry control, special robot, medical device and home service robots. Research of robot arm control system is a focus in robot area. It is meaningful to increase the performance in accuracy, stability and feasibility.This paper is the research and design about a control system based on a four degrees freedom’s design. And, we strive to develop a high stability, reliability and accurate control system.Firstly, according to the control requirements of the robotic system, the overall design of the system control program is based on a single CPU. Turn the steering control to achieve the control of the duty cycle of the PWM wave output by the main controller, so as to realize the position control of each joint. In terms of hardware, the paper mainly discusses how to use the ARM microprocessor STM32F103ZET6, MG995 Servo, MG945 servos, ultrasonic sensors and power supply module as the main components, build a joint motion control system by building hardware platforms and software control program. Then follow the structured design ideas, principles and design methods sequentially over each part is analyzed and discussed, and then give the actual schematic or circuit diagram. In software design, the control program is divided into the run modules and the initialization module and design program of each module separately.Control system experiments show that the system can significantly improve the precision of control, and improve system stability, accuracy, so that the positioning accuracy of the robot arm has been greatly improved and enhanced.Key Words: Four Degrees Freedom Robot, STM32, Cortex-M3, Pulse Width Modulation目录1绪论 (1)1.1机械臂概述 (1)1.1.1机械臂研究的意义 (1)1.1.2国内外机械臂的研究现状及发展趋势 (1)1.1.3机械臂的分类 (2)1.2机械臂控制的研究内容 (4)1.2.1机械臂的驱动方式 (4)1.2.2机械臂的机械结构 (4)1.2.3机械臂的控制器 (5)1.2.4机械臂的控制算法 (5)1.3嵌入式系统简介 (5)1.4本文的主要工作 (6)2机械臂控制系统的总体方案设计 (7)2.1机械臂的机械结构设计 (7)2.1.1臂部结构设计原则 (7)2.1.2机械臂自由度的确定 (7)2.2工作对象简介 (7)2.3机械臂关节控制的总体方案 (8)2.3.1机械臂控制器类型的确定 (8)2.3.2机械臂控制系统结构 (9)2.3.3关节控制系统的控制策略 (9)2.4本章小结 (9)3机械臂控制系统硬件设计 (11)3.1机械臂控制系统概述 (11)3.2微处理器选型 (11)3.3主控制模块设计 (13)3.3.1电源电路 (13)3.3.2复位电路 (14)3.3.3时钟电路 (15)3.3.4 JTAG调试电路 (15)3.4驱动模块设计 (16)3.5电源模块设计 (17)3.6传感器模块设计 (19)3.7本章小结 (19)4机械臂控制系统软件设计 (20)4.1初始化模块设计 (20)4.1.1系统时钟控制 (20)4.1.2 SysTick定时器 (22)4.1.3 TIM定时器 (23)4.1.4通用输入输出接口GPIO (24)4.1.5超声波传感器模块 (24)4.2运行模块设计 (25)4.3本章小结 (26)5 系统的整机调试 (27)5.1硬件调试 (27)5.2软件调试 (28)5.3故障原因及解决方法 (31)5.4本章小结 (32)结论 (33)致谢 (34)参考文献 (35)附录 (37)附录A (37)附录B (46)附录C (47)1绪论1.1机械臂概述1.1.1机械臂研究的意义早在几千年前,人类就开始了机器人的制造,以解决人类繁重的劳动。
∙舵机的工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
∙舵机的控制:舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;请看下形象描述吧:∙舵机的工作电压和电流:每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V,TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。
六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
舵机三根线的区分:信号线接单片机I/O口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O口直接控制;电源正极,接输入电源的正极;地线,接输入电源的负极;备注:如果控制部分和电源部分是分开的,两者一定要共地。
舵机的原理,以及数码舵机VS模拟舵机一、舵机的原理标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。
以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。
3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。
该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。
该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。
当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。
有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。
原理是这样的:收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。
当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。
因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。
超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。
这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近)一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。
注意,给舵机供电电源应能提供足够的功率。
控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。
当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。
某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
二、数码舵机VS模拟舵机数码舵机比传统的模拟舵机,在工作方式上有一些优点,但是这些优点也同时带来了一些缺点。
数码舵机常见问题原理分析及解决:一、数码舵机与模拟舵机的区别传统模拟舵机和数字比例舵机(或称之为标准舵机)的电子电路中无MCU微控制器,一般都称之为模拟舵机。
老式模拟舵机由功率运算放大器等接成惠斯登电桥,根据接收到模拟电压控制指令和机械连动位臵传感器(电位器)反馈电压之间比较产生的差分电压,驱动有刷直流电机伺服电机正/反运转到指定位臵。
数字比例舵机是模拟舵机最好的类型,由直流伺服电机、直流伺服电机控制器集成电路(IC),减速齿轮组和反馈电位器组成,它由直流伺服电机控制芯片直接接收PWM(脉冲方波,一般周期为20ms,脉宽1~2 ms,脉宽1 ms为上限位臵,1.5ms为中位,2ms为下限位臵)形式的控制驱动信号,迅速驱动电机执行位臵输出,直至直流伺服电机控制芯片检测到位臵输出连动电位器送来的反馈电压与PWM控制驱动信号的平均有效电压相等,停止电机,完成位臵输出。
数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强等优势已逐渐取代模拟舵机在机器人、航模中得到广泛应用。
数码舵机设计方案一般有两种:一种是MCU+直流伺服电机+直流伺服电机控制器集成电路(IC)+减速齿轮组+反馈电位器的方案,以下称为方案1,另一种是MCU+直流伺服电机+减速齿轮组+反馈电位器的方案,以下称为方案2。
市面上加装数码驱动板把模拟舵机改数码舵机属方案1。
二、舵机电机调速原理及如何加快电机速度常见舵机电机一般都为永磁直流电动机,如直流有刷空心杯电机。
直流电动机有线形的转速-转矩特性和转矩-电流特性,可控性好,驱动和控制电路简单,驱动控制有电流控制模式和电压控制两种模式。
舵机电机控制实行的是电压控制模式,即转速与所施加电压成正比,驱动是由四个功率开关组成H桥电路的双极性驱动方式,运用脉冲宽度调制(PWM)技术调节供给直流电动机的电压大小和极性,实现对电动机的速度和旋转方向(正/反转)的控制。
∙舵机的工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
∙舵机的控制:舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;请看下形象描述吧:∙舵机的工作电压和电流:每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V,TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。
六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
舵机三根线的区分:信号线接单片机I/O口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O口直接控制;电源正极,接输入电源的正极;地线,接输入电源的负极;备注:如果控制部分和电源部分是分开的,两者一定要共地。
995舵机控制995舵机控制第一章简介1.1 研究背景舵机是一种能够精确控制角度的电机,广泛应用于机器人、航模、智能家居等领域。
995舵机是一款高性能的舵机,具有精准的角度控制、大扭矩输出和高速响应等特点,因此在工业控制和自动化领域中得到广泛应用。
1.2 研究目的本论文旨在探究995舵机的控制方法和技术,为舵机的应用提供可行的控制方案,进一步推动舵机的发展和应用。
1.3 论文结构本论文分为四个章节。
第一章是引言,介绍舵机的背景、研究目的和论文结构。
第二章是995舵机的原理和参数分析。
第三章是995舵机的控制方法和技术。
第四章是结论,总结研究结果并提出下一步的研究方向。
第二章 995舵机的原理和参数分析2.1 995舵机的原理995舵机通过PWM信号控制电机的转动角度,其电机通过减速装置驱动输出轴的角度转动。
PWM信号的占空比与输出轴的具体角度成正比,因此可以通过改变PWM信号的占空比来实现舵机输出轴的精准控制。
2.2 995舵机的参数分析995舵机的重要参数包括扭矩、速度、转向角度和工作电压等。
扭矩是衡量舵机输出能力的重要参数,速度则决定了舵机的响应速度。
转向角度决定了舵机可以转动的角度范围,工作电压决定了舵机正常运行的电压范围。
第三章 995舵机的控制方法和技术3.1 PWM信号控制方法995舵机通过改变PWM信号的占空比来控制输出轴的转动角度。
具体可以通过单片机或者控制器产生PWM信号,然后通过舵机对应的控制输出线连接舵机,最后改变PWM信号的占空比即可实现舵机的角度控制。
3.2 位置反馈控制技术通过给舵机添加位置反馈装置,可以实现精确的角度控制和位置闭环控制。
可以使用光电编码器等位置传感器获取输出轴的实际位置,然后与目标角度进行比较,通过控制器对PWM信号进行调整,实现舵机转动角度的闭环控制。
第四章结论本论文主要研究了995舵机的控制方法和技术。
通过对995舵机的原理和参数进行分析,可以了解舵机的工作原理和性能特点。
•舵机的工作原理:控制信号由接收机的通道进入信号调制芯片, 获得直流偏置电压。
它内部有一个 基准电路,产生周期为20ms 宽度为1.5ms 的基准信号,将获得的直流偏置电 压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动 芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转, 使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理, 知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管 或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
•舵机的控制: 舵机的控制一般需要一个20ms 的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms 范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的 控制关系是这样的: 0.5ms --------- 0 度;1.0ms ---——45 度; 1.5ms --- ——90 度; 2.0ms --- •——135 度; 2.5ms --- —180度;请看下形象描述吧•舵机的工作电压和电流:0 015 1.0 1 5 2 0 2.5 mstorobotTR213每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V , TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。
六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
•舵机三根线的区分:地线电源正极信号线信号线接单片机I/O 口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O 口直接控制;电源正极,接输入电源的正极;地线,接输入电源的负极;备注:如果控制部分和电源部分是分开的,两者一定要共地。
舵机最近几年国内机器人开始起步发展,很多高校、中小学都开始进行机器人技术教学。
小型的机器人、模块化的机器人、组件式的机器人是教学机器人的首选。
在这些机器人产品中,舵机是最关键,使用最多的部件。
根据控制方式,舵机应该称为微型伺服马达。
早期在模型上使用最多,主要用于控制模型的舵面,所以俗称舵机。
舵机接受一个简单的控制指令就可以自动转动到一个比较精确的角度,所以非常适合在关节型机器人产品使用。
仿人型机器人就是舵机运用的最高境界。
一、舵机的结构舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。
能够利用简单的输入信号比较精确的转动给定角度的电机系统。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文Servo。
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路。
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵盘舵机的外壳一般是塑料的,特殊的舵机可能会有金属铝合金外壳。
金属外壳能够提供更好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。
金属外壳也可以提供更牢固的固定位置。
齿轮箱有塑料齿轮、混合齿轮、金属齿轮的差别。
塑料齿轮成本底,噪音小,但强度较低;金属齿轮强度高,但成本高,在装配精度一般的情况下会有很大的噪音。
小扭矩舵机、微舵、扭矩大但功率密度小的舵机一般都用塑料齿轮,如Futaba 3003,辉盛的9g微舵。
金属齿轮一般用于功率密度较高的舵机上,比如辉盛的995舵机,在和3003一样体积的情况下却能提供13KG勺扭矩。
Hitec甚至用钛合金作为齿轮材料,其高强度能保证3003大小的舵机能提供20几公斤的扭矩。
混合齿轮在金属齿轮和塑料齿轮间做了折中,在电机输出齿轮上扭矩一般不大,用塑料齿轮。
】、舵机的规格和选型当今使用的舵机有模拟舵机和数字舵机之分(具体差别见第节),不过数字舵机还是相对较少。
下面的技术规格同时适用与两种舵机。
舵机的规格主要有几个方面:转速、转矩、电压、尺寸、重量、材料等。
我们在做舵机的选型时要对以上几个方面进行综合考虑。
•转速转速由舵机无负载的情况下转过60。
角所需时间来衡量,常见舵机的速度一般在0.11/60 0~0.21S/60。
之间。
舵机扭矩的单位是KG- CM 这是一个扭矩单位。
可以理解为在舵盘上距舵机轴 中心水平距离1CM 处,舵机能够带动的物体重量。
*电压 厂商提供的速度、转矩数据和测试电压有关,在4.8V 和6V 两种测试电压下这两 个参数有比较大的差别。
如 Futaba S-9001在4.8V 时扭力为3.9kg、速度为舵机扭矩=n Kgxm0.22秒,在6.0V时扭力为5.2kg、速度为0.18秒。
若无特别注明,JR的舵机都是以4.8V为测试电压,Futaba则是以6.0V作为测试电压。
舵机的工作电压对性能有重大的影响,舵机推荐的电压一般都是 4.8V或6V。
当然,有的舵机可以在7V以上工作,比如12V的舵机也不少。
较高的电压可以提高电机的速度和扭矩。
选择舵机还需要看我们的控制卡所能提供的电压。
«尺寸、重量和材质舵机的功率(速度x转矩)和舵机的尺寸比值可以理解为该舵机的功率密度,一般同样品牌的舵机,功率密度大的价格高。
塑料齿轮的舵机在超出极限负荷的条件下使用可能会崩齿,金属齿轮的舵机则可能会电机过热损毁或外壳变形。
所以材质的选择并没有绝对的倾向,关键是将舵机使用在设计规格之内。
用户一般都对金属制的物品比较信赖,齿轮箱期望选择全金属的,舵盘期望选择金属舵盘。
但需要注意的是,金属齿轮箱在长时间过载下也不会损毁,最后确是电机过热损坏或外壳变形,而这样的损坏是致命的,不可修复的。
塑料出轴的舵机如果使用金属舵盘是很危险的,舵盘和舵机轴在相互扭转过程中,金属舵盘不会磨损,舵机轴会在一段时间后变得光秃,导致舵机完全不能使用。
综上,选择舵机需要在计算自己所需扭矩和速度,并确定使用电压的条件下,选择有150流右甚至更大扭矩富余的舵机。
三、模拟舵机及其控制原理舵机是一个微型的伺服控制系统,具体的控制原理可以用下图表示:比例电位器工作原理是控制电路接收信号源的控制脉冲,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
模拟舵机需要一个外部控制器(遥控器的接收机)产生脉宽调制信号来告诉舵机转动角度,脉冲宽度是舵机控制器所需的编码信息。
舵机的控制脉冲周期20ms脉宽从0.5ms-2.5ms,分别对应-90度到+90度的位置。
如下图所示:需要解释的是舵机原来主要用在飞机、汽车、船只模型上,作为方向舵的调节和控制装置。
所以,一般的转动范围是45°、60°或者90°,这时候脉冲宽度一般只有1ms-2ms之间。
而后舵机开始在机器人上得到大幅度的运用,转动的角度也在根据机器人关节的需要增加到-90度至90度之间,脉冲宽度也随之有了变化。
对于控制脉冲有的书上讲的是PPM脉位调制信号),有的定义为PW M脉宽调制信号)。
准确的讲应该叫什么笔者也没有确定的答案,请恕我才疏学浅。
对与模型遥控器,发射机到接收机之间的信号编码方式是PPM(也有PCM方式,当然,这个信号的编码传输过程不是接收机到舵机之间,切不可混淆。
对于PPM PCM在调制信号上面的区别可以看《现代无线通讯》。
对与机器人控制而言,我们一般通过单片机产生PWI信号控制舵机,所以下面对于舵机的控制脉冲都称为PWMI号(一家直言,如若觉得不准确可以来信讨论)<如果你是爱好者,只是想了解舵机,对于它的控制原理了解到这就可,下面我们将对模拟舵机的具体电路进行分析,需要读者具有初步的模电、数电常识。
我们在网上可以很容易找到Futaba 3003的电路图,如图4.3所示。
PWM由接收通道进入信号解调电路BA6688的12脚,这是周期20ms脉宽0.5ms-2.5ms之间的PWM信号。
该PWM信号和内部以5K电位器实际电压为基准的脉冲进行比较,得到的脉冲进行展宽后给H桥,H桥根据展宽后的脉冲信号驱动电机。
解调后的直流偏置电压和通过电位器得到反馈电压进行比较得到电压差,BA66898根据该电压差通过3脚输送的PWM信号给电机驱动电路BAL6686驱动电机正反转,同时电机转动带动电位器转动,导致比较后的电压差变化,直到电压差为0,电机停止。
查下H-Bridge的驱动信号是脉冲还是什么。
测一下,这个脉冲和电机转动的关系。
65RGND7A3A朴BA6688L B 1R— NOP Futaba 之外的其它厂家使用的不是 BA6688这款IC , 一般选择 M51660 AA5188 YT5166这些芯片一般没有 EMF B 制。
叠加在5K 的电位器反馈电压之上的还有一个 Motor Back EMF ,意思是电机反向 电动势。
根据电磁感应定律,无论作为电动机还是作为发电机运行, 电枢都会产 生感应电动势。
发电机中的感应产生的电动势就称为感应电动势, 电动机的感应 电动势一般称为反电动势。
电动机的感应电动势会和转速成比例变化。
通过搭建 桥式伺服电路,可以或许电动机的反电动势,通过和给定的基准电压进行比较, 可以实现简单的速度换控制。
3003用这样的方式来进行速度伺服控制,保证舵 机的最高速度稳定。
而电位器只是进行点位控制,做简单的位置闭环。
控制电路驱动电机的也是利用PW脉冲,不过此脉冲非彼脉冲,此脉冲占空比是0-100%,周期20ms控制电路通过占空比进行调速,通过正反脉冲进行调向。
具体可以看直流电动机控制方面的书籍。
四、数字舵机及其控制原理数字舵机从根本上颠覆了舵机的控制系统设计。
数字和模拟舵机相比在两个方面有明显的优点。
1、防抖。
2、响应速度快。
模拟舵机由于使用模拟器件搭建的控制电路,电路的反馈和位置伺服是基于电位器的比例调节方式。
电位器由于线性度的影响,精度的影响,个体差异性的问题,会导致控制匹配不了比例电压,比如我期望得到2.5V 的电压位置,但第一次得到的是2.3V,经过1个调节周期后,电位器转过的位置已经是2.6V 了,这样控制电路就会给电机一个方向脉冲调节,电机往回转,又转过头,然后有向前调节,以至于出现不停的震荡,这就是我们所看到的抖舵现象。