MPU-60X0寄存器总结
- 格式:xls
- 大小:173.00 KB
- 文档页数:3
MPU-60X0是全球首例9轴运动处理传感器。
它集成了3轴MEMS 陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP (DigitalMotionProcessor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。
扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。
MPU-60X0也可以通过其I2C 接口连接非惯性的数字传感器,比如压力传感器。
MPU-60X0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。
为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。
一个片上1024字节的FIFO,有助于降低系统功耗。
和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz的SPI接口(SPI仅MPU-6000可用)。
对于需要高速传输的应用,对寄存器的读取和中断可用20MHz的SPI。
另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。
芯片尺寸4×4×0.9mm,采用QFN封装(无引线方形封装),可承受最大10000g的冲击,并有可编程的低通滤波器。
关于电源,MPU-60X0可支持VDD范围2.5V±5%,3.0V±5%,或3.3V±5%。
另外MPU-6050还有一个VLOGIC引脚,用来为I2C输出提供逻辑电平。
VLOGIC电压可取1.8±5%或者VDD5.特征以数字输出6轴或9轴的旋转矩阵、四元数(quaternion)、欧拉角格式(EulerAngleforma)的融合演算数据。
具有131LSBs/°/sec敏感度与全格感测范围为±250、±500、±1000与±2000°/sec的3轴角速度感测器(陀螺仪)。
CONTENTS目录Document Number: RM-MPU-6000A-00Revision: 4.0Release Date: 03/09/2012Translation:Tan说明:能力有限,个别地方采用原文没进行翻译,翻译有很过错误与不通顺,建议查看英语原文对于翻译错误或者有好的修改意见欢迎发送电子邮件到****************,持续更新中。
在这里我要感谢我亲爱的老猪猪!1 2 3 REVISION HISTORY修订历史PURPOSE AND SCOPE REGISTER MAP寄存器列表4 REGISTER DESCRIPTIONS 寄存器描述4.1 REGISTERS 13 TO 16–SELF TEST REGISTERS 自检寄存器4.2 REGISTER 25–SAMPLE RATE DIVIDER 采样频率分频器4.3 REGISTER 26–CONFIGURATION 配置4.4 REGISTER 27–GYROSCOPE CONFIGURATION 陀螺仪配置4.5 REGISTER 28–ACCELEROMETER CONFIGURATION 加速度计配置4.6 REGISTER 31–MOTION DETECTION THRESHOLD运动检测阀值4.7 4.8 4.9 REGISTER 35–FIFO ENABLEREGISTER 36–I2C MASTER CONTROLREGISTERS 37 TO 39–I2C SLAVE 0 CONTROLFIFO使能I2C主机控制I2C从机0控制4.10 REGISTERS 40 TO 42–I2C SLAVE 1 CONTROL 4.11 REGISTERS 43 TO 45–I2C SLAVE 2 CONTROL 4.12 REGISTERS 46 TO 48–I2C SLAVE 3 CONTROL 4.13 REGISTERS 49 TO 53–I2C SLAVE 4 CONTROL 4.14 REGISTER 54–I2C MASTER STATUS I2C从机1控制I2C从机2控制I2C从机3控制I2C从机4控制I2C主机状态4.15 REGISTER 55–INT PIN / BYPASS ENABLE CONFIGURATIONINT引脚/旁路有效使能配置4.16 REGISTER 56–INTERRUPT ENABLE 4.17 REGISTER 58–INTERRUPT STATUS 中断使能中断状态4.18 REGISTERS 59 TO 64–ACCELEROMETER MEASUREMENTS加速度计测量值4.19 4.20 REGISTERS 65 AND 66–TEMPERATURE MEASUREMENT温度测量值REGISTERS 67 TO 72–GYROSCOPE MEASUREMENTS陀螺仪测量值4.21 REGISTERS 73 TO 96–EXTERNAL SENSOR DATA 外部传感器数据4.22 4.23 4.24 4.25 REGISTER 99–I2C SLAVE 0 DATA OUTREGISTER 100–I2C SLAVE 1 DATA OUTREGISTER 101–I2C SLAVE 2 DATA OUTREGISTER 102–I2C SLAVE 3 DATA OUTI2C从机0数据输出I2C从机1数据输出I2C从机2数据输出I2C从机3数据输出4.26 REGISTER 103–I2C MASTER DELAY CONTROL I2C主机延时管理4.27 REGISTER 104–SIGNAL PATH RESET 信号通道复位4.28 REGISTER 105–MOTION DETECTION CONTROL 运动检测控制4.29 REGISTER 106–USER CONTROL 用户配置4.30 4.31 REGISTER 107–POWER MANAGEMENT 1REGISTER 108–POWER MANAGEMENT 2电源管理 1电源管理 24.32 REGISTER 114 AND 115–FIFO COUNT REGISTERS FIFO计数寄存器4.33 REGISTER 116–FIFO READ WRITE FIFO读写4.34 REGISTER 117–WHO AM I 我是谁1 2 3 REVISION HISTORY修订历史请参阅原文PURPOSE AND SCOPE请参阅原文REGISTER MAP寄存器列表请参阅原文4 REGISTER DESCRIPTIONS 寄存器描述本节介绍MPU-60X0的每个寄存器的功能和内容。

MPU6050寄存器操作MPU6050的寄存器地址由一个7位的二进制数字表示,最高位为0表示读操作,为1表示写操作。
在进行寄存器操作之前,需要先向MPU6050的I2C地址发送START信号,然后发送要读写的寄存器地址,再发送ACK信号。
下面是一些常用的MPU6050寄存器及其功能说明:1.SMPLRT_DIV寄存器(采样频率分频器):用于配置采样频率,通过设置寄存器的值,可以调整采样频率的分频比。
2. Gyro Config寄存器(陀螺仪配置):用于配置陀螺仪的量程和滤波器。
通过设置寄存器的值,可以选择陀螺仪的量程范围和滤波器带宽。
3. Accelerometer Config寄存器(加速度计配置):用于配置加速度计的量程和滤波器。
通过设置寄存器的值,可以选择加速度计的量程范围和滤波器带宽。
4.PWR_MGMT_1寄存器(电源管理):用于控制MPU6050的电源管理,包括选择时钟源、休眠模式等。
通过设置寄存器的值,可以控制MPU6050的电源状态。
5.FIFO寄存器(数据缓冲区):MPU6050内部有一个FIFO缓冲区,用于存储传感器的原始数据。
通过读写FIFO寄存器,可以实现对传感器数据的存取。
在进行MPU6050寄存器操作时1.寄存器操作需要使用I2C总线进行通信,需要先初始化I2C接口,并设置MPU6050的I2C地址。
2.在进行寄存器写操作时,需要先向MPU6050发送START信号,然后发送写操作的寄存器地址及要写入的数据,最后发送STOP信号。
3.在进行寄存器读操作时,需要先向MPU6050发送START信号,然后发送读操作的寄存器地址和MPU6050的I2C地址,再发送ACK信号。
接着读取MPU6050返回的数据,最后发送STOP信号。
4.在进行寄存器操作时,需要根据MPU6050的数据手册来确定寄存器地址和相关配置值的含义和取值范围。
使用MPU6050时,可以通过对寄存器的配置来满足不同的应用需求。
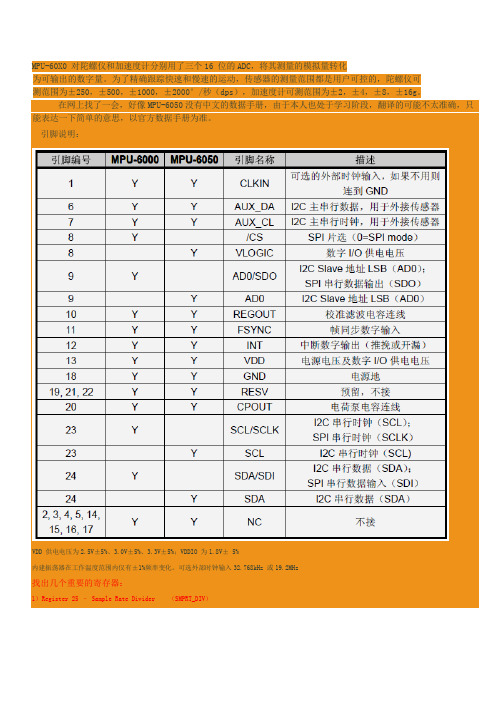
MPU-60X0 对陀螺仪和加速度计分别用了三个16 位的ADC,将其测量的模拟量转化为可输出的数字量。
为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。
在网上找了一会,好像MPU-6050没有中文的数据手册,由于本人也处于学习阶段,翻译的可能不太准确,只能表达一下简单的意思,以官方数据手册为准。
引脚说明:VDD 供电电压为2.5V±5%、3.0V±5%、3.3V±5%;VDDIO 为1.8V± 5%内建振荡器在工作温度范围内仅有±1%频率变化。
可选外部时钟输入32.768kHz 或19.2MHz找出几个重要的寄存器:1)Register 25 – Sample Rate Divider (SMPRT_DIV)1)SMPLRT_DIV 8位无符号值,通过该值将陀螺仪输出分频,得到采样频率该寄存器指定陀螺仪输出率的分频,用来产生MPU-60X0的采样率。
传感器寄存器的输出、FIFO输出、DMP采样和运动检测的都是基于该采样率。
采样率的计算公式采样率 = 陀螺仪的输出率 / (1 + SMPLRT_DIV) 当数字低通滤波器没有使能的时候,陀螺仪的输出平路等于8KHZ,反之等于1KHZ。
2)Register 26 – Configuration (CONFIG)1)EXT_SYNC_SET 3位无符号值,配置帧同步引脚的采样2)DLPF_CFG 3位无符号值,配置数字低通滤波器该寄存器为陀螺仪和加速度计配置外部帧同步(FSYNC)引脚采样和数字低通滤波器(DLPF)。
通过配置EXT_SYNC_SET,可以对连接到FSYNC引脚的一个外部信号进行采样。

当我们单独把加速度计和陀螺仪组合使用时,要将两种功能模块组合在一起并做到精确控制并不容易。
这是采用MPU 6050则可以很可靠和精确的来完成开发。
相对来MPU6050除了比其他传感器便宜,在功能上也表现得更好。
MPU6050指定用于产生MPU-60X0采样率的陀螺仪输出速率的分频器。
传感器寄存器输出,FIFO输出和DMP采样都基于采样率。
采样率是通过将陀螺仪输出速率除以 SMPLRT_DIV 产生的:采样率=陀螺仪输出速率/(1 + SMPLRT_DIV)当DLPF禁用(DLPF_CFG = 0或7)时,陀螺仪输出速率= 8kHz,当DLPF使能时(见寄存器26)为1kHz。
注意:加速度计输出速率是1kHz。
这意味着对于大于1kHz的采样率,同一个加速度计采样可能会不止一次输出到FIFO,DMP和传感器寄存器。
该寄存器为陀螺仪和加速度计配置外部帧同步(FSYNC)引脚采样和数字低通滤波器(DLPF)设置。
连接到FSYNC引脚的外部信号可以通过配置 EXT_SYNC_SET 进行采样。
FSYNC 引脚的信号变化被锁存,以便捕获短闪光灯。
锁存的FSYNC信号将按照寄存器 25 中定义的采样速率进行采样。
采样后,锁存器将复位为当前的 FSYNC 信号状态。
根据下表,取样值将被报告在由 EXT_SYNC_SET 的值确定的传感器数据寄存器中的最低有效位的位置。
MPU6050用于触发陀螺仪自检并配置陀螺仪的满量程范围。
陀螺仪自检允许用户测试机械和电气部分陀螺仪。
每个陀螺仪轴的自检可通过控制该寄存器的XG_ST,YG_ST 和ZG_ST位来激活。
每个轴的自检可以独立进行,也可以同时进行。
当自检被激活时,车载电子装置将启动适当的传感器。
这种驱动将使传感器的检测质量移动一段相当于预先确定的科里奥利力的距离。
这种检测质量位移导致传感器输出发生变化,这反映在输出信号中。
输出信号用于观察自检响应。
自检响应定义如下:自检响应=启用自检的传感器输出 - 未启用自检的传感器输出每个陀螺仪轴的自检限制在MPU-6000 / MPU-6050产品规格文件。

小四轴飞行器制作过程电子1201俞强吴文杰注:本文只讲我们做四轴遇到的实际的真正困扰我们的一些问题以及我们自身的经验,可以结合我们的报告来看,对于前人的经验以及我们觉得对我们有帮助的文章或帖子以及一些理论知识将在每一部分的讲解中给出,对于理论,本文尽量少讲甚至不讲,建议在看本文的每个部分的时候,写把给出的参考资料阅读一番。
一.飞行器大体结构1.飞行控制电路(飞控),稍后介绍,是飞行器设计的最关键部分。
2.电机+桨:720空心杯电机,注意不人为要阻止电机转动,很容易损坏。
720表示电机直径:7 MM;电机长度:20 MM。
根据飞行器的具体大小以及飞行测试的实际情况自行选择其他规格电机。
桨要注意有正桨和反桨的区别,见下图:注意:正桨逆时针转动,反桨逆时针转动。
如果不确定,可以在安装好电机后,开电源看看是不是四个桨风都是向下吹的。
对于相同的电机,桨的大小不同,飞行效果也不一样,小桨效率低,但抗风性能好。
大桨效率高(就是省电),但抗风性能差。
3.电池:400mah,3.7v,20c锂电池基本知识:1)1000mAh的意思是指充满电的情况下用1安培的电流放电, 可以放电一个小时. 400mAh的电池在在1安培电流充放电情况下, 充放电时间大约是25分钟. 如果采用4安培的电流放电, 放电时间大约在6分钟(25/4)左右.2)20c指放电倍率。
放电倍率指的是放电电流, 以电池容量的倍数计算. 上述电池的放电电流可根据下面的公式计算:400mAhX25C=10A。
4. X 型四轴和+ 型四轴电机安放的区别:其实是要注意传感器mpu6050和电机的放置,因为传感器是有轴向的,图中大框为整块飞控,小框为mpu6050,飞行方向为上下左右。
X二.飞控电路1.飞控电路主要器件:1)mcu的选择:对于小四轴mcu实际上选择很多,只要满足:最少4路PWM,尽量有最少一路AD转换,尽量有硬件spi和i2c接口,频率够快即可。
电气电子工程学院自主创新作品两轮平衡小车摘要两轮自平衡小车具有体积小、结构简单、运动灵活的特点,适用于狭小和危险的工作空间,在安防和军事上有广泛的应用前景。
两轮自平衡小车是一种两轮左右平衡布置的,像传统倒立摆一样,本身是一种自然不稳定体,其动力学方程具有多变量、非线性、强耦合、时变、参数不确定性等特性,需要施加强有力的控制手段才能使其保持平衡。
本作品采用STM32单片机作为主控制器,用一个陀螺仪传感器来检测车的状态,通过dvr8800控制小车两个电机,来使小车保持平衡状态,通过2.4G模块无线通讯进行遥控来控制小车运行状态。
关键词:智能小车;单片机;陀螺仪。
目录一.前言 (4)一.两轮平衡车的平衡原理 (4)2.1 平衡车的机械结构..........................................................................错误!未定义书签。
2.2 两轮车倾倒原因的受力分析 (4)2.3 平衡的方法 (5)三.系统方案分析与选择论证 (5)3.1 系统方案设计 (5)3.1.1 主控芯片方案 (5)3.1.2 姿态检测传感器方案 (6)3.1.3 电机选择方案 (6)3.2 系统最终方案 (7)四.主要芯片介绍和系统模块硬件设计 (7)4.1.STM32单片机简介(stm32rbt6) (7)4.2.陀螺仪传感器 (8)4.3.TB6612 (8)4.4.编码器 (9)4.5. 主控电路 (9)4.6 电机驱动电路 (10)五.系统软件设计 (11)5.1 PID概述 (11)5.2 数字PID算法 (12)5.3 PID控制器设计 (13)六.硬件电路 (14)七.制作困难 (15)八.结论 (16)九.参考文献 (16)一.前言应用意义。
自平衡车巧妙地利用地心引力使其自身保持平衡,并使得重力本身成为运动动能的提供者,载重越大,行驶动能也就越大,具有环保的特点(胡春亮等,2007)。
1.//技术文档未公布的寄存器主要用于官方DMP操作2.#define MPU6050_RA_XG_OFFS_TC 0x00 //[bit7] PWR_MODE, [6:1] XG_OFFS_TC, [bit 0]OTP_BNK_VLD3.#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD4.//bit7的定义,当设置为1,辅助I2C总线高电平是VDD。
当设置为0,辅助I2C总线高电平是VLOGIC5.6.#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD7.#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN8.#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN9.#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN10.11.#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS 两个寄存器合在一起12.#define MPU6050_RA_XA_OFFS_L_TC 0x0713.14.#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS 两个寄存器合在一起15.#define MPU6050_RA_YA_OFFS_L_TC 0x0916.17.#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS 两个寄存器合在一起18.#define MPU6050_RA_ZA_OFFS_L_TC 0x0B19.20.#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR 两个寄存器合在一起21.#define MPU6050_RA_XG_OFFS_USRL 0x1422.23.#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR 两个寄存器合在一起24.#define MPU6050_RA_YG_OFFS_USRL 0x1625.26.#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR 两个寄存器合在一起27.#define MPU6050_RA_ZG_OFFS_USRL 0x1828.29./*陀螺仪的采样频率*/30./*传感器的寄存器输出,FIFO输出,DMP采样、运动检测、31.*零运动检测和自由落体检测都是基于采样率。
MPU-6000 and MPU-6050Register Map and DescriptionsRevision 4.0Purpose and Scope目的和范围This document provides preliminary information regarding the register map and descriptions for the Motion Processing Units™ MPU-6000™ and MPU-6050™, collectively called the MPU-60X0™ or MPU™.本文档提供了初步的信息有关的寄存器映射和描述运动处理单元™微处理器- 6000™和微处理器- 6050™,统称为MPU-60X0™或微控制器™。
The MPU devices provide the world’s first integrated 6-axis motion processor solution that eliminates the package-level gyroscope and accelerometer cross-axis misalignment associated with discrete solutions. The devices combine a 3-axis gyroscope and a 3-axis accelerometer on the same silicon die together with an onboard Digital Motion Processor™ (DMP™) capable of processing complex 9-axis sensor fusion algorithms using the field-proven and proprietary MotionFusion™ engine.微机设备提供了世界上第一个集成六轴运动处理器解决方案,消除了包访问的陀螺仪和加速度计横轴失调与离散的解决方案。
电气电子工程学院自主创新作品两轮平衡小车摘要两轮自平衡小车具有体积小、结构简单、运动灵活的特点,适用于狭小和危险的工作空间,在安防和军事上有广泛的应用前景。
两轮自平衡小车是一种两轮左右平衡布置的,像传统倒立摆一样,本身是一种自然不稳定体,其动力学方程具有多变量、非线性、强耦合、时变、参数不确定性等特性,需要施加强有力的控制手段才能使其保持平衡。
本作品采用STM32单片机作为主控制器,用一个陀螺仪传感器来检测车的状态,通过dvr8800控制小车两个电机,来使小车保持平衡状态,通过2.4G模块无线通讯进行遥控来控制小车运行状态。
关键词:智能小车;单片机;陀螺仪。
目录一.前言 (4)一.两轮平衡车的平衡原理 (4)2.1 平衡车的机械结构..........................................................................错误!未定义书签。
2.2 两轮车倾倒原因的受力分析 (4)2.3 平衡的方法 (5)三.系统方案分析与选择论证 (5)3.1 系统方案设计 (5)3.1.1 主控芯片方案 (5)3.1.2 姿态检测传感器方案 (6)3.1.3 电机选择方案 (6)3.2 系统最终方案 (7)四.主要芯片介绍和系统模块硬件设计 (7)4.1.STM32单片机简介(stm32rbt6) (7)4.2.陀螺仪传感器 (8)4.3.TB6612 (8)4.4.编码器 (9)4.5. 主控电路 (9)4.6 电机驱动电路 (10)五.系统软件设计 (11)5.1 PID概述 (11)5.2 数字PID算法 (12)5.3 PID控制器设计 (13)六.硬件电路 (14)七.制作困难 (15)八.结论 (16)九.参考文献 (16)一.前言应用意义。
自平衡车巧妙地利用地心引力使其自身保持平衡,并使得重力本身成为运动动能的提供者,载重越大,行驶动能也就越大,具有环保的特点(胡春亮等,2007)。