第四章 静定结构的位移计算一25
- 格式:ppt
- 大小:1.02 MB
- 文档页数:25
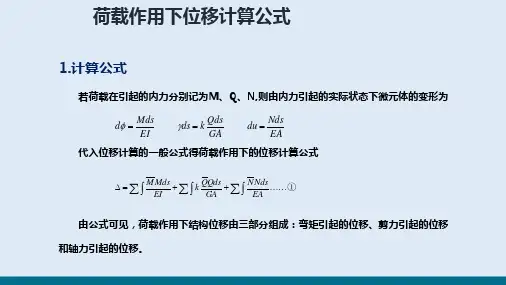
第4章静定结构的位移计算计算结构位移的目的结构在荷载作用下会产生内力,同时使其材料产生应变,以致结构发生变形。
由于变形,结构上各点的位置将会发生改变。
杆件结构中杆件的横截面除移动外,还将发生转动。
这些移动和转动称为结构的位移。
此外,结构在其他因素如温度改变、支座位移等的影响下,也都会发生位移。
b5E2RGbCAP例如图4—1a所示简支梁,在荷载作用下梁的形状由直变弯,如图4—1b所示。
这时,横截面的形心移动了一个距离,称为点的线位移。
同时截面还转动了一个角度,成为截面的角位移或转角。
p1EanqFDPw又如图4—2a所示结构,在内侧温度升高的影响下发生如图中虚线所示的变形。
此时,C点移至C点,即C点的线位移为C C。
若将C C沿水平和竖向分解<图4—2b),则分量C C和CC分别称为C点的水平位移和竖向位移。
同样,截面C还转动了一个角度,这就是截面C的角位移。
DXDiTa9E3d在结构设计中,除了要考虑结构的强度外,还要计算结构的位移以验算其刚度。
验算刚度的目的,是保证结构物在使用过程中不致发生过大的位移。
RTCrpUDGiT计算结构位移的另一重要目的,是为超静定结构的计算打下基础。
在计算超静定结构的反力和内力时,除利用静力平衡条件外,还必须考虑结构的位移条件。
这样,位移的计算就成为解算超静定结构时必然会遇到的问题。
5PCzVD7HxA此外,在结构的制作、架设等过程中,常须预先知道结构位移后的位置,以便采取一定的施工措施,因而也须计算其位移。
jLBHrnAILg本章所研究的是线性变形体系位移的计算。
所谓线性变形体系是位移与荷载成比例的结构体系,荷载对这种体系的影响可以叠加,而且当荷载全部撤除时,由何在引起的位移也完全消失。
这样的体系,变形应是微小的,且应力与应变的关系符合胡克定律。
由于变形是微小的,因此在计算结构的反力和内力时,可认为结构的几何形状和尺寸,以及荷载的位置和方向保持不变。
xHAQX74J0X功广义力和广义位移在力学中,功的定义是:一个不变的集中力所作的功等于该力的大小与其作用点沿力作用线方向所发生的分位移的乘积。

结构力学——静定结构位移计算在工程和建筑领域中,结构力学作为一门重要的学科,主要研究了结构的受力、变形、破坏机理等问题。
其中,静定结构位移计算是结构力学中的一个重要内容。
静定结构所谓静定结构,是指能够通过静力学方程求解出所有节点的受力、反力和变形的结构。
这种结构是不需要知道材料的物理性质和荷载的实际情况的。
在静定结构中,结构的支座固定方式和荷载情况是已知的,因此能够通过解决一组静力学方程,求解出结构中节点的受力和变形。
静定结构位移计算静定结构位移计算是静定结构的重要计算方法之一。
在结构分析中,位移是一种常见的形变量,它反映了物体在载荷作用下发生的形变情况。
在静定结构中,位移是结构的重要参数之一。
它可以通过求解一组线性方程组得到。
具体来说,就是通过应变—位移—节点力关系,将结构各节点位移用系数矩阵和加载节点力表示出来,再通过求解一个线性方程组,就可以得到各节点的位移值。
静定结构位移计算的步骤静定结构位移计算中的步骤包括:1.列出节点位移方程节点位移与内力之间有一定的关系,可以通过位移方程和内力方程来表示。
这些方程可以根据物理实际条件进行建立。
2.确定支座反力支座反力是从位移计算中得到的结果之一。
支座反力是指结构上所有支点所承受的力,在位移计算时是必须考虑的。
3.形成节点位移方程组形成节点位移方程组时,需要考虑杆件的个数、受力条件、材料特性、支座情况等因素。
4.解出节点位移通过解一个线性方程组,我们可以根据已知的节点力和位移方程,求出每个节点的位移值。
静定结构位移计算的应用静定结构位移计算在现代工程设计中具有广泛的应用。
它能够在保证结构稳定的前提下,可以对结构进行优化设计,提高结构的安全性、稳定性、经济性等方面的性能。
除此之外,静定结构位移计算还可以应用于建筑设计、桥梁设计、机械设计、工业生产等领域中。
它可以提供结构设计的数据支持,为结构工程的实施提供参考。
静定结构位移计算是结构力学中的一个重要方向,其计算方法基于静力学方程进行,其特点是简单、可靠和实用。
第四章静定结构的位移计算[结构的位移](1)结构在荷载作用下产生应力和应变,以致结构的形状发生变化,即产生变形,由于这种变形,使结构上各点的位置产生位移,截面发生转动,这种移动和转动统称为位移。
(2)位移有水平位移,竖向位移,即线位移;有角位移;又有相对位移和绝对位移;统称为广义位移。
(3)除了荷载作用将引起位移外,温度改变,支座位移,材料收缩,制造误差等因素,虽不一定都产生应力和应变,但都将使结构产生位移。
[计算位移的假设](1)材料线性假设:结构的材料服从虎克定律,应力与应变成线性关系;(2)几何线性假设:即小变形假设,结构的变形很小,应变与位移成线性关系;(3)弹性假设:结构在力的作用下发生变形,在力卸载之后,结构完全恢复原来的形状;(4)理想约束假设:结构的约束都为理想约束,不考虑摩擦的影响。
满足上述条件的变形体系,称之为线弹性变形体系。
它们的位移与荷载之间为线性关系,位移计算满足叠加原理。
[虚功的概念]作功的力与位移彼此独立无关,这种功称为虚功;在虚功中,力与位移分别属于同一体系的两种彼此独立无关的状态。
力所属的状态,称为力状态和第一状态;位移所属的状态,称为位移状态和第二状态。
力状态位移状态表示力状态的外力在位移状态相应位移上所作的虚功。
[静力可能的力状态和位移可能的力状态]静力可能的力状态——满足静力平衡条件和力的边界条件;位移可能的位移状态——满足变形协调条件和位移边界条件。
[虚功原理]如果变形体上的力状态为静力可能的力状态,位移状态为位移可能的位移状态,它们彼此独立无关,则外力虚功等于内力虚功。
[结构位移计算的一般公式]位移状态虚力状态结构在荷载、支座移动和温度变化等作用下而发生变形,为求某点的位移,在点沿所求位移方向加一单位力。
力状态为虚单位力状态,位移状态为实际位移状态。
由虚功原理,求得结构位移计算的一般公式为:其中,、和分别为实际位移状态的轴向应变、剪切角和曲率;、和分别为虚单位力状态的轴力、剪力和弯矩;为实际位移状态的支座位移,为对应支座位移虚力状态的反力。