偏置曲柄滑块机构有无急回运动的讨论(会做图)(课件中)
- 格式:ppt
- 大小:128.00 KB
- 文档页数:5

曲柄滑块机构华北电力大学设备状态监测与故障诊断结课论文院系能源动力与机械工程学院专业班级研动1023班学号1102202134学生姓名王向志指导教师顾煜炯二○一一年四月摘要本文简述平面连杆机构的组成,着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:平面四杆曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.Key words:planar linkage slider-crank mechanism dynamic and kinematic analysis vibration and balance stability目录摘要 (Ⅰ)ABSTRACT (Ⅱ)第1章平面连杆机构的简介 (1)1.1平面连杆机构的定义 (1)1.2平面连杆机构的优缺点 (1)1.2.1优点 (1)1.2.2缺点 (1)1.3平面四杆机构的分类 (1)第2章曲柄滑块机构简介 (2)2.1曲柄滑块机构定义 (2)2.2曲柄滑块机构的特性及应用 (3)2.3曲柄滑块机构的分类 (3)2.3.1偏心轮机构简介 (4)第3章曲柄滑块机构的动力学与运动学特性 (5)3.1曲柄滑块的动力学特性 (5)3.2曲柄滑块的运动学特性 (7)第4章曲柄滑块机构运行中的振动与平衡 (8)参考文献 (10)第1章平面连杆机构的简介1.1平面连杆机构的定义平面连杆机构是由若干构件用低副(转动副、移动副)连接组成的平面机构,又称平面低副机构。
偏置曲柄滑块的运动方程式1. 引言偏置曲柄滑块机构是一种常见的机械传动装置,广泛应用于各个领域,如工业生产线、汽车发动机等。
它由一个旋转的偏置曲柄和一个在偏置曲柄上滑动的滑块组成。
通过改变偏置曲柄的旋转角度,可以控制滑块的运动轨迹和速度。
本文将介绍偏置曲柄滑块机构的基本原理和运动方程式,并通过数学推导和图示进行详细阐述。
2. 偏置曲柄滑块机构的基本原理偏置曲柄滑块机构由三个主要部分组成:偏置曲柄、连杆和滑块。
其中,偏置曲柄是一个固定在轴上并绕轴旋转的零件,连杆连接着偏置曲柄和滑块。
当偏置曲柄绕轴旋转时,连杆上的一端固定在偏置曲柄上,另一端连接着滑块。
由于连杆长度不变且固定在两个点上,所以当偏置曲柄旋转时,滑块被迫在一定的轨迹上运动。
3. 偏置曲柄滑块的运动方程式为了推导偏置曲柄滑块的运动方程式,我们需要定义一些参数和符号:•偏置曲柄长度:a•连杆长度:b•偏置曲柄旋转角度:θ•滑块位置:(x,y)根据几何关系,可以得到以下方程:x = a * cos(θ) + b * cos(φ) (1) y = a * sin(θ) + b * sin(φ) (2)其中,φ是连杆与x轴的夹角。
为了求解φ,我们可以利用三角形余弦定理:cos(φ) = (a^2 + b^2 - x^2 - y^2) / (2ab)将cos(φ)代入方程(1)和(2)中,即可得到偏置曲柄滑块的运动方程式。
4. 运动轨迹和速度分析根据运动方程式(1)和(2),我们可以分析偏置曲柄滑块机构的运动轨迹和速度。
4.1 运动轨迹通过改变偏置曲柄旋转角度θ,可以控制滑块的运动轨迹。
当θ=0时,滑块位于初始位置(a, 0)。
随着θ的增大,滑块将沿着一个椭圆轨迹运动,直到θ=π/2时达到最高点。
4.2 速度分析根据运动方程式(1)和(2),我们可以求解滑块的速度。
对x和y关于时间t求导数,即可得到滑块在x和y方向上的速度:v_x = -a * sin(θ) * θ’ - b * sin(φ) * φ’ (3) v_y = a * cos(θ) * θ’ + b * cos(φ) * φ’ (4)其中,θ’和φ’分别表示偏置曲柄旋转角度和连杆夹角随时间变化的导数。
关于偏置式曲柄滑块机构的优化设计及运动分析论文关于偏置式曲柄滑块机构的优化设计及运动分析论文1引言曲柄滑块机构是机械设计中常用的一种机构。
按行程速比系数K 设计平面曲柄滑块机构的问题一般归纳为:已知滑块行程H、行程速比系数K,通常有辅助条件,如给定偏距e(或给定曲柄长度r2,或给定连杆长度r3),来设计曲柄滑块机构(即确定未知长度尺寸),最后校验最小传动角γmin。
对该问题的求解,传统采用简单、直观的图解法,但设计精度较低。
利用Matlab解析法可迅速精确地设计曲柄滑块机构。
机构运动分析是根据给定的原动件运动规律,求出机构中其它构件的运动。
通过分析可以确定某些构件运动所需的空间,校验其运动是否干涉;速度分析可以确定机构从动件的速度是否合乎要求;加速度分析为惯性力计算提供加速度数据。
运动分析是综合分析和力分析的基础。
使用Matlab中的Simulink,可对动态系统进行建模、分析和仿真。
从而在形成实际系统前,能进行适时的修正,以减少总体设计时间,实现高效开发的目的。
2优化设计2.1设计实例及方程例如:要求设计滑块的'行程H=100mm,K=1.25,γmin≥40°的曲柄滑块机构。
式中:r1为滑块位移;r2为曲柄长度;r3为连杆长度;r4为偏距。
根据图1建立矢量方程:r2+r3=r1+r4速度方程的矩阵形式:1r3sinθ30-r3cosθ3·r1ω3=-ω2r2sinθ2ω2r2cosθ2加速度方程的矩阵形式:1r3sinθ30-r3cosθ3¨r2α3=-α2r2sinθ2-r2ω22cosθ2-r3ω23cosθ3α2r2cosθ2-r2ω22sinθ2-r3ω23sinθ3根据行程,极位夹角,行程速比系数,最小传动角的定义可推出以下方程:θ=K-1K+1×180°θ=arcsinr4r3-r2-arcsinr4r3+r2H=(r2+r3)2-r24-(r3-r2)2-r24γmin=arcosr2+r4r3式中:K为行程速比系数;H为行程;θ为极位夹角;γmin为最小传动角。
机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆(********)陈柯宇(11071177)熊宇飞(11071174)张保开(11071183)班级:1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。

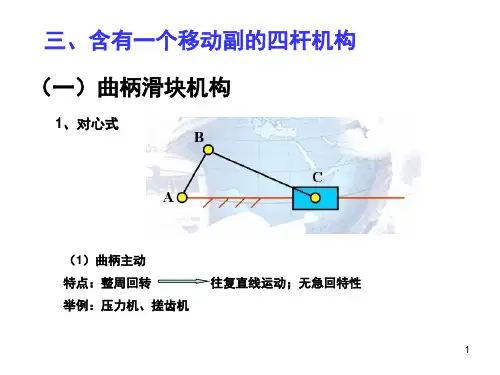
曲柄滑块机构的运动仿真赵晶群2150820041曲柄滑块机构有对心曲柄滑块、偏置曲柄滑块和偏心轮机构三种,如图: 图1对心曲柄滑块机构对心曲柄滑块:滑块上转动副中心的移动方位线通过曲柄旋转中心。
对心曲柄滑块,其极位角为0,形成速比系数为1,滑块在往返中平均速度相等。
图2 偏置曲柄滑块机构偏置曲柄滑块:滑块上转动副中心的移动方位线不通过曲柄旋转中心。
其极位角不为0,具有急回特征,常被用来节省空回行程的时间,以提高劳动生产率。
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中。
活塞式发动机以滑块为主动件,把往复移动转换为不整周或整周的回转运动;压缩机、冲床以曲柄为主动件,把整周转动转换为往复移动。
偏置曲柄滑块机构的滑块具有急回特性,锯床就是利用这一特性来达到锯条的慢进和空程急回的目的。
当曲柄长度很小时,通常把曲柄滑块做成偏心轮,这样不仅增大了轴颈的尺寸,提高偏心轮的强度和刚度,而且当轴颈位于中部时,还可以安装整体样式连杆,使得结构简化。
偏心轮机构可以实现非线性传动关系,且传动平稳,结构紧凑,动力平衡性好。
图3 偏心轮机构曲柄滑块的运动仿真分为以下四个步骤:(1)建立曲柄滑块机构所需构件:机架、曲柄、连杆、滑块(2)装配(3)运动仿真(4)运动分析一、建立曲柄滑块机构所需构件1、机架启动Pro/E,新建文件:选“零件”/“实体”,文件名jijia-1,以front 平面为草绘平面。
确定打钩,对称拉伸,拉伸距离为5.1、机架绘制一个直径为5mm的圆,拉伸长度为140mm拉出两个圆柱凸台:绘制一个直径为5mm的圆,拉伸距离为3mm和一个直径为3mm的同心圆,拉伸距离为3mm2、曲柄新建零件,名称为qubing-2,拉伸草绘,拉伸距离为33、连杆新建零件,名称liangan-3. 拉伸草绘,只在一边画圆拉伸孔,再在另一边拉伸凸台。
凸台与R2.5同心,高度3。
4、滑块新建零件,名称huakuai-4. 对称拉伸,拉伸长度为10绘制一个直径为3mm的圆,拉伸距离为10二、零件的装配(1)进入装配模式(2)装入基础元件单击工具栏中的【装配】按钮,弹出【打开】对话框,选择“jijia-1”,单击打开按钮,弹出【元件放置】操控面板。

平面四杆机构急回特性的讨论及应用程引正【摘要】Fast-returning character is an important feature of planar four-bar mechanism.Taking the crank rocker mechanism as an example, the fast-returning movement character of planar four-bar mechanism is mainly analyzed.It has vital signifi-cance to improve the production efficiency of industrial machinery by reasonably selecting travel speed coefficient K and ex-treme position angle θ.%急回特性是平面四杆机构的一个重要特性,主要以曲柄摇杆机构为例,分析了平面四杆机构急回运动特性。
合理选择行程速度变化系数K、极位夹角θ,对提高工业机械的生产效率具有重要的意义。
【期刊名称】《机械研究与应用》【年(卷),期】2013(000)006【总页数】3页(P154-155,158)【关键词】平面四杆机构;急回特性;行程速度变化系数K;应用【作者】程引正【作者单位】武威职业学院,甘肃武威 733000【正文语种】中文【中图分类】TH1221 引言急回特性是平面四杆机构基本特性之一,急回运动的程度一般用行程速度变化系数K来比较。
笔者主要从平面四杆机构的急回原理、表示方法、判断条件、以及急回特性在工程机械上应用等方面,结合具体事例加以初步研究和讨论,以便合理地进行机构设计和使用。
2 平面四杆机构急回特性的分析[1]图1所示为曲柄摇杆机构,当曲柄AB为原动件作等速回转时,摇杆CD为从动件作往复变速摆动,曲柄AB在回转一周的过程中有两次与连杆BC共线,此时摇杆CD分别处于C1 D和C2 D两个极限位置。