节点定位综合算法
- 格式:ppt
- 大小:3.12 MB
- 文档页数:35
无线定位算法综述一无线传感网络与节点定位1. 无线传感网络中的关键技术无线传感器网络作为当今信息领域新的究热点,涉与多学科交叉的研究领域,涉与到非常多的关键技,主要包括:拓扑控制;网络协议;网络安全;时间同步;定位技术;数据融合;嵌入式操作系统;无线通信技术;跨层设计和应用层设计。
2. 无线传感器网络节点定位机制无线传感器网络节点定位问题可表述为:依靠有限的位置己知节点即信标节点(锚节点),确定布设区中其它未知节点的位置,在传感器节点间建立起一定的空间关系的过程。
无线定位机制一般由以下三个步骤组成:第一步,对无线电信号的一个或几个电参量(振幅、频率、相位、传播时间)进行测量,根据电波的传播特性把测量的电参量转换为距离、距离差与到达角度等,用来表示位置关系;第二步,运用各种算法或技术来实现位置估计;第三步,对估计值进行优化。
3. 节点间距离或角度的测量在无线传感器网络中,节点间距离或角度的测量技术常用的有RSSI、TOA、TDOA和AOA等。
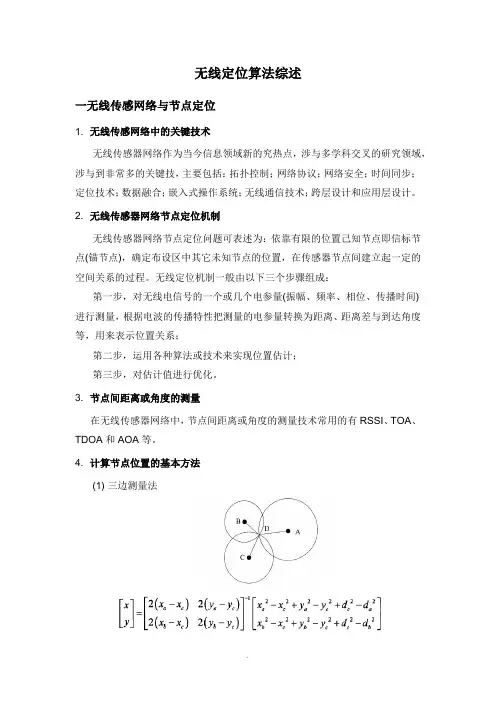
4. 计算节点位置的基本方法(1) 三边测量法(2) 三角测量法;(3) 极大似然估计法。
5. 无线传感器网络定位算法的性能评价几个常用的评价标准:定位精度;规模;锚节点密度;节点密度;覆盖率;容错性和自适应性;功耗;代价。
6. 无线传感器网络定位技术分类(1)物理定位与符号定位;(2)绝对定位与相对定位;(3)紧密耦合与松散耦合;(4)集中式计算与分布式计算;(5)基于测距技术的定位和无须测距技术的定位;(6)粗粒度与细粒度;(7)三角测量、场景分析和接近度定位。
二典型的自身定位系统与算法到目前为止,WSN 自身定位系统和算法的研究大致经过了两个阶段。
第1 阶段主要偏重于紧密耦合型和基于基础设施的定位系统。
对于松散耦合型和无须基础设施的定位技术的关注和研究可以认为是自身定位系统和算法研究的第2 阶段。
1. Cricket定位系统未知节点使用TDOA技术测量其与锚节点的距离,使用三边测量法提供物理定位。
无线传感器网络中基于RSSI的节点定位算法研究无线传感器网络中基于RSSI的节点定位算法研究摘要:随着无线传感器网络的发展,节点定位技术成为无线传感器网络研究领域中的重要问题之一。
本文基于RSSI (Received Signal Strength Indicator)的节点定位算法进行了研究。
一、引言无线传感器网络是由大量的分布式无线传感器节点组成的网络系统,广泛应用于环境监测、目标跟踪、智能交通等领域。
节点的定位是无线传感器网络中的关键问题之一,准确的节点定位可以提高网络性能和应用效果。
二、节点定位技术概述节点定位技术主要分为两类:基于GPS的定位和基于无线信号的定位。
基于GPS的定位技术需要节点具备GPS模块,但GPS模块存在成本高、功耗大等问题。
基于无线信号的定位技术可以通过节点之间的相对距离和信号强度来实现定位。
三、RSSI技术原理RSSI是指接收信号强度指示器,是无线传感器网络中常用的参数。
RSSI的测量可以通过接收到的信号强度来判断节点之间的距离和位置关系。
四、基于RSSI的节点定位算法基于RSSI的节点定位算法主要有三种:距离法、三角法和指纹法。
1. 距离法:根据RSSI和距离之间的关系,通过RSSI测量值来计算节点之间的距离。
然后通过多个节点之间的距离来计算目标节点的位置。
2. 三角法:利用三角定位原理,通过多个节点之间的RSSI值来计算目标节点的位置。
通常需要至少3个节点才能定位。
3. 指纹法:通过在节点部署区域进行事先测量和标记,得到不同位置的RSSI指纹图,并与目标节点接收到的RSSI进行匹配,从而确定目标节点的位置。
五、实验结果分析通过对比不同算法的节点定位精度,可以得出以下结论:距离法具有较高的精度,但依赖于传输的RSSI值准确性;三角法需要多个节点参与定位,效果相对较好;指纹法在实际应用中可以得到较高的定位精度。
六、节点定位误差分析节点定位误差的主要影响因素包括传感器的误差、信号传播过程中的噪声干扰等。
定位技术的方法根据具体的定位机制,可以将现有的定位方法分为两类:基于测距的(Range-based)方法和不基于测距的(Range-free)方法[6]。
基于测距的定位机制需要测量未知节点与锚节点之间的距离或者角度信息,然后使用三边测量法、三角测量法或最大似然估计法计算未知节点的位置。
而不基于测距的定位机制无需距离或角度信息,或者不用直接测量这些信息,仅根据网络的连通性等信息实现节点的定位。
常用的定位方法是基于测距定位方法,在这种定位机制中需要先得到两个节点之间的距离或者角度信息,通常采用以下方法。
(1)信号强度测距法(2)到达时间及时间差测距法(3)时间差定位法(4)到达角定位法信号强度测距法(RSSI)已知发射功率,在接收节点测量接收功率,计算传播损耗,使用理论或经验的信号传播模型将传播损耗转化为距离。
例如,在自由空间中,距发射机d 处的天线接收到的信号强度由下面的公式给出:Pr(d )=PtGtGrλ2/(4π)2d 2L其中,Pt为发射机功率;Pr(d )是在距离d 处的接收功率;Gt、Gr分别是发射天线和接收天线的增益;d 是距离,单位为米;L为与传播无关的系统损耗因子;λ是波长,单位为米。
由公式可知,在自由空间中,接收机功率随发射机与接收机距离的平方衰减。
这样,通过测量接收信号的强度,再利用式(1)就能计算出收发节点间的大概距离。
得到锚节点与未知节点之间的距离信息后,采用三边测量法或最大似然估计法可计算出未知节点的位置。
三边计算的理论依据是,在三维空间中,知道了一个未知节点到三个以上锚节点的距离,就可以确定该点的坐标。
三边测量法在二维平面上用几何图形表示出来的意义是:当得到未知节点到一个锚节点的距离时,就可以确定此未知节点在以此锚节点为圆心、以距离为半径的圆上;得到未知节点到3个锚节点的距离时,3个圆的交点就是未知节点的位置。
然而,公式只是电磁波在理想的自由空间中传播的数学模型,实际应用中的情况要复杂的多,尤其是在分布密集的无线传感器网络中。


基于人工智能的无线传感器网络节点定位算法研究在无线传感器网络(Wireless Sensor Networks, WSN)中,节点定位是一个重要的问题。
准确的节点定位可以提供重要的位置信息,从而帮助实现诸如环境监测、智能交通、物流管理和军事侦查等应用。
随着人工智能(Artificial Intelligence, AI)的发展,基于人工智能的无线传感器网络节点定位算法逐渐得到关注和研究。
在传统的节点定位方法中,常使用全局定位系统(Global Positioning System, GPS)等技术来获取节点的坐标信息。
然而,在某些环境中,GPS定位可能无法实现,例如在室内环境或者是建筑物内部。
此时,基于人工智能的无线传感器网络节点定位算法可以提供一种有效的替代方案。
基于人工智能的无线传感器网络节点定位算法主要分为两个步骤:距离估计和位置推断。
首先,距离估计是通过无线信号强度衰减模型来估计节点之间的距离。
传统的无线传感器网络节点定位算法通常使用固定的衰减模型来估计距离。
然而,基于人工智能的算法可以使用机器学习技术,通过建模和学习来自动选择最佳的衰减模型,并进行距离估计。
例如,可以使用神经网络、支持向量机或者深度学习算法来建立距离估计模型,并通过训练数据来优化模型参数。
其次,位置推断是根据节点之间的距离估计结果来推断节点的坐标位置。
传统的位置推断方法包括三角测量和多边形法。
然而,这些方法通常需要多个节点之间的协作、时间同步和复杂的计算,限制了其在实际应用中的可用性。
基于人工智能的算法可以利用机器学习技术,综合考虑距离估计结果、拓扑结构和节点属性等信息,来进行位置推断。
例如,可以使用粒子滤波、卡尔曼滤波或者贝叶斯网络等方法来实现节点位置的推断。
基于人工智能的无线传感器网络节点定位算法具有以下优势:首先,基于人工智能的算法可以适应不同的环境和场景。
传统的节点定位方法通常依赖于特定的硬件设备或者基础设施,并且对环境有较高的要求。
基于深度神经网络的传感器网络节点定位算法研究随着科技的不断发展和普及,传感器网络(Sensor Networks)在现代化生产和生活中得到了广泛应用。
传感器网络是由大量的节点组成,这些节点通过无线信道相互通信,实时采集和传输各种监测数据。
传感器节点的精确定位是传感器网络中一个重要的问题,定位的精度直接决定了传感器网络的实时性和可靠性。
传统的传感器网络节点定位算法通常采用基于距离或角度的方法,如广播定位(Bassetto定位)、最小二乘估计(Least Square Estimation)等。
这些算法的精度较低,受到环境变化和信号干扰的影响较大。
随着深度神经网络(Deep Neural Network)技术的发展,基于深度神经网络的传感器网络节点定位算法逐渐成为研究热点。
深度神经网络是一种模仿人脑神经元系统的机器学习模型,具有自动学习、强适应性、高鲁棒性等优势。
基于深度神经网络的传感器节点定位算法主要分为两个阶段:离线训练模型和在线解算位置。
离线训练模型阶段,首先需要确定传感器网络中节点的位置信息和信号强度信息,然后将这些信息作为训练集输入深度神经网络模型中进行学习和训练。
传统的节点定位算法往往只考虑节点之间的距离或角度,而基于深度神经网络的节点定位算法除了距离和角度之外,还考虑了节点之间的信号强度等其他信息,从而提高了位置估计精度。
在训练阶段中,需要注意不同环境下的不同特征和干扰因素,构建适合不同环境的神经网络模型。
在线解算位置阶段,传感器节点会不断收集周围节点的信号强度信息,利用事先训练好的深度神经网络模型进行解算,最终得到节点的位置信息。
在线解算的过程中,需要注意选择较为稳定的解算算法和有效的信息传输机制,保证算法的实时性和稳定性。
同时,在实际应用中,还需要考虑传感器节点的能耗和通信质量等因素,从而优化算法的性能。
基于深度神经网络的传感器节点定位算法具有精度高、适应性强、可靠性好等优点。
通过训练和优化神经网络模型,可以提高算法的准确度和实时性。
网络定位的原理
网络定位是一种利用计算机网络技术进行定位的方法。
其原理是利用网络中的网络节点之间的通信信息和数据包传输的延迟等特征,通过测量数据包在网络中的传输时间和经过的网络节点数等信息,结合已知的网络拓扑图和节点位置信息,推算出目标节点的位置。
具体来说,网络定位通常分为两个阶段:数据库构建和定位计算。
在数据库构建阶段,需要收集一定规模的网络测量数据,包括节点之间的网络延迟、丢包率等信息。
这些数据可以通过网络探测工具(如ping)或特殊的测量节点进行采集。
同时还需
要获取网络拓扑图和节点位置信息,可以通过网络文档、网络监控工具等方式获取。
在定位计算阶段,根据已有的网络测量数据和节点位置信息,通过数学建模和算法计算,得到目标节点的位置。
常用的算法有最小二乘法、贝叶斯推断、Kalman滤波等。
这些算法会综
合考虑节点之间的距离、网络延迟、拓扑图等因素,进行定位计算。
网络定位的准确性受多种因素影响,例如网络拓扑图的完整性、测量数据的准确性和可靠性、定位算法的优化程度等。
在实际应用中,通常会采用多种方法和技术相结合,提升网络定位的准确性和可靠性。