传感器第3章 电容式传感器.
- 格式:ppt
- 大小:517.00 KB
- 文档页数:31
《第一章传感器的一般特性》1转速(r/min)0 500 1000 1500 2000 2500 3000输出电压(V)0 9.1 15.0 23.3 29.9 39.0 47.51)该测速发电机的灵敏度。
2)该测速发电机的线性度。
2.已知一热电偶的时间常数τ=10s,若用它来测量一台炉子的温度,炉内温度在540οC和500οC 之间按近似正弦曲线波动,周期为80s,静态灵敏度k=1,试求该热电偶输出的最大值和最小值,以及输入与输出信号之间的相位差和滞后时间。
3.用一只时间常数为0.355s 的一阶传感器去测量周期分别为1s、2s和3s的正弦信号,问幅值误差为多少?4.若用一阶传感器作100Hz正弦信号的测试,如幅值误差要求限制在5%以内,则时间常数应取多少?若在该时间常数下,同一传感器作50Hz正弦信号的测试,这时的幅值误差和相角有多大?5.已知某二阶系统传感器的固有频率f0=10kHz,阻尼比ξ=0.1,若要求传感器的输出幅值误差小于3%,试确定该传感器的工作频率范围。
6.某压力传感器属于二阶系统,其固有频率为1000Hz,阻尼比为临界值的50%,当500Hz的简谐压力输入后,试求其幅值误差和相位滞后。
《第二章应变式传感器》1.假设某电阻应变计在输入应变为5000με时电阻变化为1%,试确定该应变计的灵敏系数。
又若在使用该应变计的过程中,采用的灵敏系数为 1.9,试确定由此而产生的测量误差的正负和大小。
2.如下图所示的系统中:①当F=0和热源移开时,R l=R2=R3=R4,及U0=0;②各应变片的灵敏系数皆为+2.0,且其电阻温度系数为正值;③梁的弹性模量随温度增加而减小;④应变片的热膨胀系数比梁的大;⑤假定应变片的温度和紧接在它下面的梁的温度一样。
在时间t=0时,在梁的自由端加上一向上的力,然后维持不变,在振荡消失之后,在一稍后的时间t1打开辐射源,然后就一直开着,试简要绘出U0和t的关系曲线的一般形状,并通过仔细推理说明你给出这种曲线形状的理由。
传感器技术习题解答第一章传感器的一般特性1-1:答:传感器在被测量的各个值处于稳定状态时,输出量和输入量之间的关系称为传感器的静态特性;其主要指标有线性度、灵敏度、精确度、最小检测量和分辨力、迟滞、重复性、零点漂移、温漂。
1-2:答:(1)动态特性是指传感器对随时间变化的输入量的响应特性;(2)描述动态特性的指标:对一阶传感器:时间常数对二阶传感器:固有频率、阻尼比。
1-3:答:传感器的精度等级是允许的最大绝对误差相对于其测量范围的百分数,即A=ΔA/Y FS*100%1-4;答:(1):传感器标定曲线与拟合直线的最大偏差与满量程输出值的百分比叫传感器的线性度;(2)拟合直线的常用求法有:端基法和最小二5乘法。
1-5:答:由一阶传感器频率传递函数w(jw)=K/(1+jωη),确定输出信号失真、测量结果在所要求精度的工作段,即由B/A=K/(1+(ωη)2)1/2,从而确定ω,进而求出f=ω/(2π).1-6:答:若某传感器的位移特性曲线方程为y1=a0+a1x+a2x2+a3x3+…….让另一传感器感受相反方向的位移,其特性曲线方程为y2=a0-a1x+a2x2-a3x3+……,则Δy=y1-y2=2(a1x+a3x3+ a5x5……),这种方法称为差动测量法。
其特点输出信号中没有偶次项,从而使线性范围增大,减小了非线性误差,灵敏度也提高了一倍,也消除了零点误差。
1-7:解:Y FS=200-0=200由A=ΔA/Y FS*100%有A=4/200*100%=2%。
精度特级为2.5级。
1-8:解:根据精度定义表达式:A=ΔA/Ay FS*100%,由题意可知:A=1.5%,Y FS=100所以ΔA=A Y FS=1.5因为 1.4<1.5所以合格。
1-9:解:Δhmax=103-98=5Y FS=250-0=250故δH=Δhmax/Y FS*100%=2%故此在该点的迟滞是2%。
1-10:解:因为传感器响应幅值差值在10%以内,且Wη≤0.5,W≤0.5/η,而w=2πf,所以 f=0.5/2πη≈8Hz即传感器输入信号的工作频率范围为0∽8Hz1-11解:(1)切线法如图所示,在x=0处所做的切线为拟合直线,其方程为:Y =a0+KX,当x=0时,Y=1,故a0=1,又因为dY/dx=1/(2(1+x)1/2)|x=0=1/2=K故拟合直线为:Y=1+x/2最大偏差ΔYmax在x=0.5处,故ΔYmax=1+0.5/2-(1+0.5)1/2=5/4-(3/2)1/2=0.025Y FS=(1+0.5/2)-1=0.25故线性度δL=ΔYmax/ Y FS*100%=0.025/0.25*100%=0.10*100%=10%(2)端基法:设Y的始点与终点的连线方程为Y=a0+KX因为x=0时,Y=1,x=0.5时,Y=1.225,所以a0=1,k=0.225/0.5=0.45而由 d(y-Y)/dx=d((1+x)1/2-(1+0.45x))/dx=-0.45+1/(2(1+x)1/2)=0有-0.9(1+x)1/2+1=0(1/0.9)2=1+xx=0.234ΔYmax=[(1+x)1/2-(1+0.45x)]|x=0.234=1.11-1.1053=0.0047Y FS=1+0.45*0.5-1=0.225δL端基=ΔYmax/ Y FS*100%=0.0047/0.225*100%=2.09%(3)最小二*法由公式()()xykninkniaxxyxxyxxxyxyxaiiiiiiiiiii*4695.00034.14695.005.1506.100365.1055.0*625.2751.1*65.1*691.60034.105.168.36265.255.0*625.255.0*691.65.1*751.1)**)22222((+==--=--==--=--=-∑∑-∑=-∑-∑=∑∑∑∑∑∑由d(y-Y)/dx=d((1+x)1/2-(1.0034+0.4695*x))/dx=-0.4695+1/(2(1+x)1/2)=0有x=1/(0.939)2-1=0.134ΔYmax=[(1+x)1/2-(1.0034+0.4695x)]|x=0.234=1.065-1.066=-0.001Y FS =1.0034+0.4695x-1.0034=0.235 δL 二*法=ΔYmax/ Y FS *100%=0.001/0.235*100%=0.0042*100%=0.42%1-12:解:此为一阶传感器,其微分方程为a 1dy/dx+a 0y=b 0x 所以 时间常数η=a 1/a 0=10sK=b 0/a 0=5*10-6V/Pa1- 13:解:由幅频特性有:()=+=⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-ωωξωωω04021/2221K A ()()3125.1arctan 36.016.0*7.0*2arctan 012arctan 947.07056.01*42120222264.010006007.010006001-=--=-⎪⎪⎭⎫⎝⎛-==+=+⎪⎪⎭⎫⎝⎛⎪⎭⎫ ⎝⎛⎪⎪⎭⎫⎝⎛⎪⎭⎫ ⎝⎛-ωωωωξωϕ1- 14:解:由题意知:()()()max minmax3%H j H j H j ωωω-<因为最小频率为W=0,由图1-14知,此时输出的幅频值为│H (jw )│/K=1,即│H (jw )│=K()maxmax 013%0.9719.3620.97KK kHz H j ωωω∴-<<<⎛<= ⎝1- 15解:由传感器灵敏度的定义有: K =m mv mmv x y μμ/51050==∆∆ 若采用两个相同的传感器组成差动测量系统时,输出仅含奇次项,且灵敏度提高了2倍,为20mv/μm.第二章 应变式传感器2-1:答:(1)金属材料在受到外力作用时,产生机械变形,导致其阻值发生变化的现象叫金属材料的应变效应。
思考与作业绪论.列出几项你身边传感测试技术的应用例子。
解:光电鼠标,电子台称,超声波测距,超声波探伤等。
第1章传感器的基本概念1. 什么叫做传感器的定义?最广义地来说,传感器是一种能把物理量、化学量以及生物量转变成便于利用的电信号的器件。
2.画出传感器系统的组成框图,说明各环节的作用。
答:1).敏感元件:直接感受被测量,并输出与被测量成确定关系的某一物理量的元件。
2).转换元件:以敏感元件的输出为输入,把输入转换成电路参数。
3).转换电路:上述电路参数接入转换电路,便可转换成电量输出。
3.传感器有哪几种分类?按被测量分类——物理量传感器——化学量传感器——生物量传感器按测量原理分类阻容力敏光电声波按输出型式分类数字传感器模拟传感器按电源型式分类无源传感器有源传感器4. 传感器的静态特性是什么?静态特性表示传感器在被测量各个值处于稳定状态时的输入输出关系。
也即当输入量为常量,或变化极慢时,这一关系就称为静态特性。
5. 传感器的动态特性是什么?动态特性是指传感器对随时间变化的输入量的响应特性,反映输出值真实再现变化着的输入量的能力。
6. 为什么要把传感器的特性分为静态特性和动态特性?传感器所测量的非电量一般有两种形式:一种是稳定的,即不随时间变化或变化极其缓慢,称为静态信号;另一种是随时间变化而变化,称为动态信号。
由于输入量的状态不同,传感器所呈现出来的输入—输出特性也不同,因此存在所谓的静态特性和动态特性。
第2章电阻式传感器1. 如何用电阻应变计构成应变式传感器?电阻应变计把机械应变信号转换成ΔR/R后,由于应变量及其应变电阻变化一般都很微小,既难以直接精确测量,又不便直接处理。
因此,必须采用转换电路或仪器,把应变计的ΔR/R变化转换成电压或电流变化(通常采用电桥电路实现这种转换。
根据电源的不同,电桥分直流电桥和交流电桥)。
2. 金属电阻应变片测量外力的原理是什么?金属电阻应变片的工作原理是基于金属导体的应变效应,即金属导体在外力作用下发生机械变形时,其电阻值随着它所受机械变形(伸长或缩短)的变化而发生变化的现象。
第三章 电容式传感器电容测量技术近几年来有了很大进展,它不但广泛用于位移、振动、角度、加速度等机械量的精密测量,而且,还逐步扩大应用于压力、差压、液面、料面、成分含量等方面的测量。
由于电容式传感器具有一系列突出的优点:如结构简单,体积小,分辨率高,可非接触测量等。
这些优点,随着电子技术的迅速发展,特别是集成电路的出现,将得到进一步的体现。
而它存在的分布电容、非线性等缺点又将不断地得到克服,因此电容式传感器在非电测量和自动检测中得到了广泛的应用。
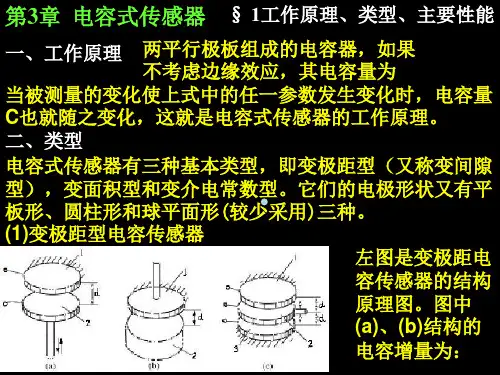
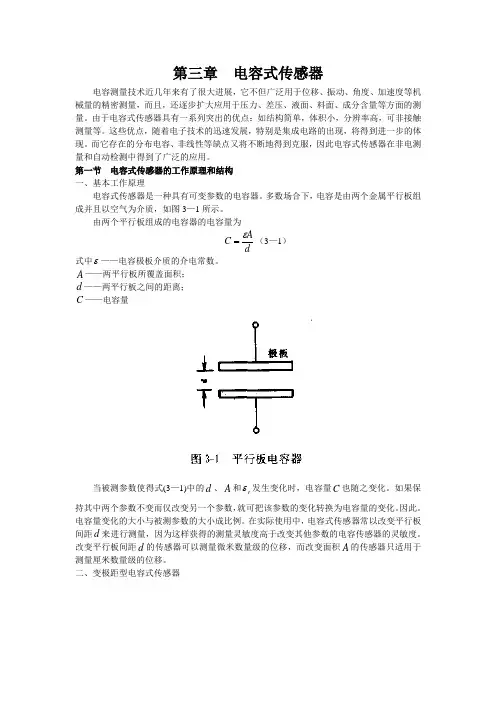
第一节 电容式传感器的工作原理和结构 一、基本工作原理电容式传感器是一种具有可变参数的电容器。
多数场合下,电容是由两个金属平行板组成并且以空气为介质,如图3—1所示。
由两个平行板组成的电容器的电容量为dAC ε=(3—1)式中ε——电容极板介质的介电常数。
A ——两平行板所覆盖面积; d ——两平行板之间的距离; C ——电容量当被测参数使得式(3—1)中的d 、A 和r ε发生变化时,电容量C 也随之变化。
如果保持其中两个参数不变而仅改变另一个参数,就可把该参数的变化转换为电容量的变化。
因此。
电容量变化的大小与被测参数的大小成比例。
在实际使用中,电容式传感器常以改变平行板间距d 来进行测量,因为这样获得的测量灵敏度高于改变其他参数的电容传感器的灵敏度。
改变平行板间距d 的传感器可以测量微米数量级的位移,而改变面积A 的传感器只适用于测量厘米数量级的位移。
二、变极距型电容式传感器由式(3—1)可知,电容量c 与极板距离d 不是线性关系,而是如图3—2所示的双曲线关系。
若电容器极板距离由初始值do 缩小d ∆,极板距离分别为do 和do-d ∆,其电容量分别为C0和C1,即0d AC ε=(3—2)⎪⎪⎭⎫⎝⎛∆-⎪⎪⎭⎫ ⎝⎛∆+=⎪⎪⎭⎫ ⎝⎛∆-=∆-=2020********d d d d d A d d d Add AC εεε(3—3)当Ad 《Ju 时,1…菩*1,则式(3—3)可以简化为 一W一一这时c1与AJ 近似呈线性关系,所以改变极板距离的电容式传感器注注是设计成Ad 在极小的范围内变化。