自动分拣项目方案案例智能生产线非标设计课件
- 格式:ppt
- 大小:2.39 MB
- 文档页数:14
智慧物流中的自动化分拣系统设计随着电商行业的蓬勃发展,物流行业也面临着越来越大的挑战。
为了提高物流效率和降低成本,智慧物流中的自动化分拣系统成为了解决方案之一、本文将从系统架构、功能模块和关键技术等方面对智慧物流中的自动化分拣系统进行详细设计。
一、系统架构1.输入模块:该模块主要用于接受分拣指令和传感器数据的输入。
分拣指令来自于物流管理系统,传感器数据则用于感知货物信息,如尺寸、重量和形状等。
2.控制模块:该模块用于分拣任务的调度和控制。
它通过与输入模块和执行模块的数据交互,实现分拣过程的自动化。
3.执行模块:该模块是整个自动化分拣系统的核心部分,它主要包括机械臂、传送带和仓库货架等设备。
机械臂用于将货物从传送带上取下,并根据分拣指令将其放入相应货架上。
4.输出模块:该模块用于输出已完成的分拣任务的信息,如分拣完成的货物数量、分拣准确率等。
二、功能模块1.分拣任务调度:根据物流管理系统的指令,将需要分拣的货物进行合理的调度,使得分拣过程高效、准确。
2.识别和分类:通过传感器和视觉系统,对货物进行识别和分类。
可以利用机器视觉技术进行图像处理,提取货物的特征,如尺寸、重量和形状等。
3.分拣执行:根据分拣指令和货物的特征,控制机械臂将货物从传送带上取下,并将其放入相应的货架上。
4.异常处理:处理分拣过程中可能发生的异常情况,如货物丢失、堵塞等问题,及时进行处理和修复。
5.数据统计和分析:对分拣过程中的数据进行统计和分析,如分拣准确率、效率等,为物流管理系统提供数据支持。
三、关键技术1.机器视觉技术:通过摄像头和图像处理算法,对货物的特征进行识别和提取,实现自动化分拣。
2.传感器技术:利用激光传感器、红外线传感器等设备,对货物的位置、尺寸、重量等信息进行感知。
3.控制算法:使用合适的控制算法,对机械臂进行精确的控制,使其能够准确地进行分拣操作。
4.通信技术:通过与物流管理系统的通信,实现分拣指令和数据的传输,确保系统的高效运行。


摘要机电一体化技术是将机械技术、电工电子技术、微电子技术、信息技术、传感器技术、接口技术信号变换技术等多种技术的有机地结合,并运用到实际当中去的技术。
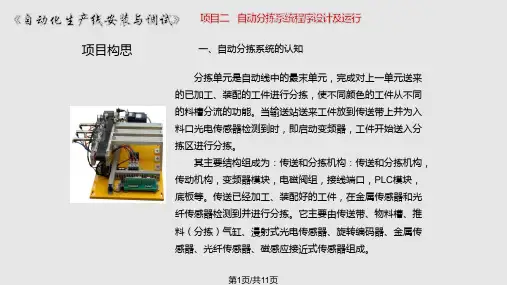
本次设计的是基于自动化生产线中的机械手及分拣单元模块,系统在生产线中完成的是工件的工位转移及按需分拣的过程。
整个系统采用PLC进行控制,机械手模块将工件搬运到分拣单元指定位置,有升降和左右横移两个自由度。
在分拣单元中,利用输送带输送工件,通过使用光电传感器和电感传感器完成对材质、颜色的检测,区分出金属工件以及黑色的非金属工件,在气缸的作用下,利用分拣器达到分拣目的。
关键词:自动化,PLC,气动系统设计,传感测试技术ABSTRACTThe integration of machinery technology is the mechanical skill,the electrician electronic technology,the microelectronic technology,the information technology, the sensor technology,the conection technology signal translation technology and many kinds of technologies organically unifies,and apply to the practice of techniques.What this design is based on automatic production line's in manipulator and the sort unit module,what the system completes in the production line is the work piece location shift and on demand sort process.The overall system uses PLC to carry on the control,the manipulator module transports the work piece to the sort unit assigns the position,has the fluctuation and about moves to two degrees-of-freedom horizontally.In the sort unit,transports the work piece using the conveyor belt, completes through the use photoelectric sensor and the inductive transceiver to the material quality,the color examination,differentiates the metal work piece as well as the black nonmetallic work piece,under air cylinder's function,serves the sort purpose using the time sorter.Key words:Automation,PLC,pneumatic system design,sensor testing technology目录1绪论 (1)1.1本论文的背景和意义 (1)1.2机械手国内外研究现状和趋势 (1)1.3分拣系统国内外发展现状和趋势 (2)1.4设计原则 (4)2自动化生产线机械手及分拣单元的方案设计 (5)2.1总体规格与相关参数 (5)2.2驱动方式的分析与选择 (5)2.3自动化生产线机械手及分拣系统的组成 (6)2.4总体建模效果 (8)3机械手方案设计 (9)3.1机械手坐标形式的选择 (9)3.2手部的选择 (9)3.3气缸等关键部分的设计 (12)4分拣单元结构设计 (22)4.1分拣单元的主要组成部分及各自功能 (22)4.2输送部分的设计与计算 (22)4.3传感检测部分 (25)4.4导向部分 (29)4.5滑槽部分 (34)5控制系统的设计 (35)5.1方案简述 (35)5.2机械手气动控制系统的设计 (36)5.3分拣系统控制系统的设计 (43)6总结 (48)7参考文献 (50)致谢 (51)1绪论1.1本论文的背景和意义自动生产线的最大特点是它的综合性和系统性,综合性主要涉及机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等多种技术有机地结合,并综合应用到生产设备中;而系统性指的是生产线的传感检测、传输与处理、控制、执行与驱动等机构在微处理单元的控制下协调有序地工作,有机地融合在一起。