2016年武汉大学遥感学院复试内容
- 格式:doc
- 大小:29.50 KB
- 文档页数:2
2016遥感院复试
注:遥感院复试包括笔试、英语面试、综合面试、机试。
1.笔试题(占10%,比较拉分)
注:以下论述题为8选5,任选5道作答。
(1,2,3为摄影测量题目,4,5,6为GIS题目,7,8为遥感题目)
1.以相关系数法影像匹配为例,说明目前影像匹配的问题有哪些方面?怎么解决?
2.解释多基线摄影测量,举例说明其应用?
3.记不清了
4.大数据的特点及其在GIS中的应用?
5.网络GIS的结构特点,并比较说明网络GIS不同计算模式的特点?
6.简介现有的网络存储技术,及其在GIS中的应用?
7.说明光谱特征曲线与光谱响应曲线的含义、联系与区别?
8.说明监督分类与非监督分类的优缺点,怎样处理能使分类效果更好?
2.上机题(最拉分的部分,所占比重最大13%)
将15张相片(宽1280列)合成一幅合成影像(宽30000),合成影像的灰度值可由双三次卷积插值法获得,合成影像某一灰度值由原相片第j张的i,i+1之间灰度值获得,文档image.txt中存储了i-2,i-1,i,i+1,i+2,i+3列的灰度值。
任选一种编程工具(VC,VB,VS)实现:
(1)求出合成影像13640处的灰度值
(2)输出i,j,13640处的灰度值到result.txt中
3.综合面试(9%)
随机发问与专业相关的问题,没有套路可言。
比较关注学生的编程能力,有没有做过项目。
4.英语面试(8%)
自我介绍,为什么考研,为什么考武汉大学,家乡,爱好等问题。
英语拉不开分,分数基本都一样。
武汉大学遥感信息工程学院本科学生素质综合测评实施办法(2010年5月修订)第一章总则第一条为了全面贯彻党的教育方针,鼓励学生争取优秀、发展特长、开拓创新,引导学生在知识、能力、素质诸方面协调发展,培养适应社会主义现代化建设要求的高素质创新人才,根据高等学校培养目标和我校实际,特制定本办法。
第二条学生素质综合测评是对学生在校期间各方面表现的测定和评价。
设定的测评指标既是评价学生的基本依据,又是学生发展的导向目标。
第三条学生素质综合测评应坚持公平、公正、公开的原则,采取定量测评与定性评价相结合、过程测评与结果评价相结合、记实测评与民主评议相结合的方法,尽可能科学合理地反映学生的实际素质状况。
第四条学生素质综合测评的内容主要包括基本素质、课程学习成绩、实践与创新能力三部分,三部分所占比例分别为10%、75%、15%。
学生素质综合测评成绩按百分制计分。
第五条凡在本校注册并参加全日制学习活动的普通本科生、第二学士学位学生,均应依据本办法以班级(或同年级同专业,下同)为单位进行测评。
第六条学生素质综合测评按学年度进行计算。
基本素质的测评由测评小组(由班导师、学生干部、学生代表组成。
下同)评议计分,报学院(或直属系,下同)审核;课程学习成绩和实践与创新能力两部分测评先由学生本人进行自评,经测评小组评议核查后报学院审核。
学生素质综合测评结果作为评奖评优的基本依据。
第七条各学院在本办法的框架内,结合本单位实际情况可在弹性区间内确定课程学习成绩和实践与创新能力测评所占的比例,调整有关测评指标,制定出本单位的学生素质综合测评实施细则,报学生工作部审核备案后在本单位实施。
学生工作部对学院学生素质综合测评工作实施监督。
第二章基本素质测评第八条基本素质是指学生在思想政治表现、个人品德修养、学习态度状况、组织纪律观念、身心健康素质等方面应当具有的符合时代特征的基本品质,是学生世界观、人生观、价值观、道德观及其行为表现等方面的综合体现。
2003-2010:名词解释:2003年1、 光谱反射率:物体的反射辐射通量与入射辐射通量之比: E E ρλλλρ= 物体的反射波谱限于紫外、可见光和近红外,尤其是后两个波段。
一个物体的反射波谱的特征主要取决于该物体与入射辐射相互作用的波长选择 .影响地物光谱反射率变化的因素有太阳位置、传感器位置、地理位置、地形、季节、气候变化、地面湿度变化、地物本身的变异、大气状况等。
2、 辐射温度:如果实际物体的总辐射出射度(包括全部波长)与某一温度绝对黑体的总辐射出射度相等,则黑体的温度称为该物体的辐射温度。
根据斯忒藩 - 玻尔兹曼定律,绝对黑体的辐射出射度与热力学温度的 4 次方成正比,由此可确定物体的辐射温度。
由于一般物体都不是黑体,其发射率总是小于 1的正数,故物体的辐射温度总是小于物体的实际温度,物体的发射率越小,其实际温度与辐射温度的偏离就越大。
3、 大气窗口:通过大气后衰减较小,透过率较高,对遥感十分有利的电磁辐射 波段通常称为“大气窗口”.(1)0.30 ~ 1.15m μ大气窗口:是遥感技术应用最主要的窗口之一。
其中 0.3~0.4m μ近紫外窗口,透射率为70%0.4~0.7m μ可见光窗口,透射率约为95%0.7~1.10m μ近红外窗口,透射率约为80%(2)1.3~2.5大气窗口:属于近红外波段1.3~1.9m μ窗口,透射率为60%-95 %1.55~1.75m μ透射率高2.0~2.5m μ窗口,透射率为80%(3)3.5~5.0m μ大气窗口:属于中红外波段,透射率约为60~70%(4)8~14m μ热红外窗口,透射率为80%左右(5)1.0mm~1m 微波窗口,透射率为35%~100%4、 太阳同步轨道:卫星轨道与太阳同步,是指卫星轨道面与太阳地球连线之间在黄道面内的夹角,不随地球绕太阳公转而改变。
地球对太阳的进动一年为360°。
因此平均每天的进动角为0.9856°。
2010年题目描述:现有一幅128×128大小的图像,其对应的像元亮度值(从0到255)存储在文本文件input.txt中(其中第一行分别表示图像的行、列数,后面每一行128个数值表示该行图像的亮度值),请编程计算:1)图像亮度最大值、最小值、平均值、方差,将结果输出保存到hist.txt文件中;2)图像的中值滤波是通过对邻域内采样数据进行排序并取得中值来决定中心像素灰度的一种处理手段,可有效消除图像中少量离散的噪声。
中值滤波可以举例描述如下:图像中的某一行亮度值如下: A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 A12对该行按照1×5窗口进行中值滤波可以理解为以当前像元为中心取前后相邻的5个像元灰度值进行排序(前后没有像元视为其亮度值为0),取中值作为当前像元亮度值,则A3像元中值滤波的结果为A1 A2 A3 A4 A5排序后的中值。
请对本题图像按照1×5窗口进行中值滤波,将结果输出保存到midle.txt文件中。
注意:1)请将程序代码、执行程序和输出结果保存到同一个文件夹下; 2)文件夹名为考号+姓名。
2011年编程实现基于最邻近规则的试探法聚类算法。
一、算法说明:设有n个样本,X1,...,Xn,不妨令任一样本作为聚类中心Z1,并选取任一非负的阈值T,为方便起见,我们选X1=Z1,然后计算X2到Z1的距离D21,若D21>T,则建立一新的聚类中心Z2,且X2=Z2,若D21<T,则认为X2在以Z1为中心的域中,即X1,X2同属一类。
然后分别计算X3到Z1,Z2的距离,得到D31,D32,若D31>T,D32>T,则建立一新的聚类中心Z3,且X3=Z3,否则将X3划分到最近的聚类中心的域中,并重新计算该类的聚类中心(该类的样本均值)。
用类似的方法对所有样本计算距离,比较阈值,决定归属,直至所有样本分类结束。
二、编程实现1)从sample.txt中读取样本数据; 2)阈值输入4(分别为(3,3),(4,4),(6,6)); 3)距离计算; 4)聚类中心计算;5)实现基于最邻近规则的试探法聚类程序; 6)将聚类结果输出至result.txt文件中。
1. 遥感系统的组成为_____、_____、_____、_____和___。
2. 遥感技术发展的历史可分为_____、_____、_____和_____四个阶段,其中第四阶段是从_____年算起的。
3. NASA的全称是(中文)_____________,英文全称是_____。
它是美国联邦政府机构,成立于1958年。
负责美国所有各种_____、_____以及_____和_____的研究及装备建造工作。
4. ___年___日,中国第一颗人造地球卫星_____发射成功。
5. 遥感分类中按遥感平台可分为_____、_____和_____。
按传感器的探测波段可分为:_____、_____和_____。
按工作方式可分为:_____和_____。
按RS的应用领域可分为:_____、_____、_____、_____、_____、_____等。
6. 遥感技术的特点有:_____、_____、_____、_____和_____等。
7. 当前遥感技术发展的趋势为:_____、_____、_____、_____和_____。
8. 遥感机理是通过利用_____主动或被动地接受地面目标_____或_____的_____,通过_____所传递的信息来识别目标,从而达到_____的目的。
9. 电磁波是电磁振动的传播,当电磁振荡进入空间时,变化的_____激发了变化的_____,使电磁振荡在空间传播,形成电磁波,也称电磁辐射。
10. 电磁波是_____波,质点的震动方向与波的传播方向_____。
11. 电磁波遇到介质(气体、液体、固体)时,会发生_____、_____、_____、_____和_____现象。
12. 可见光的波长范围是_____到_____。
13. 黑体的性质是吸收率为___,反射率为___。
14. 按照维恩位移定律的描述,黑体辐射光谱中最强辐射的波长λmax与黑体绝对温度T成___。
15. 实际地物的发射分_____和_____情况16. 按发射率变化情况,将地物分为_____、_____、_____和_____四种类型。
2014年复试笔试真题1、分析遥感专题制图优势与关键技术(50)有两本书,叫遥感制图,专题地图制图(就是你参加的那个gis开发做的那类图),现在就是用遥感的方法来制作专题地图,你需要查一下这两本书所涉及的技术。
优势:遥感制图是指通过对遥感图像目视判断或利用图像处理系统对各种遥感信息进行增强与几何纠正并加以识别,分类和制图的过程,遥感图像有航空遥感图像和卫星遥感图像,制图方式有计算机制图和常规制图,目前最多及着重研究的是利用Landsat的MSS图像制图,由于多波段的卫星具有信息量丰富,现势性强,利用它编图周期短等优点,得到了广泛的应用。
传统制图过程中,主要通过调绘,权威部门发布的地理信息,从现有出版物中转绘,GPS跟踪等方法获取地理信息。
可以看出他周期长,无论从外业调绘或GPS跟踪,周期都很长,其次资金花费较大且时间滞后。
相比较制图,遥感制图具有以下特点:1.由于它以丰富的影像细节去表现区域的地理地貌,比单纯使用线划,符号的线划地图信息量丰富,而且生动形象富有表现力。
2.由于它是以简单的线划符号和标志表示形象,无法表示或计量的地物。
弥补了单纯用形象表现地图的不足。
3.遥感地图减少了传统制图的工作量,缩短了地理制图的周期财政性强。
4.遥感图像能快速获取大范围地理信息,成图范围大。
关键技术:1.数据准备(1)地形图地形图是进行遥感影像几何精纠正的坐标参照系,也是重要的基础数据, 包含多种层面的非遥感信息数据.目前常用的地形数据多为数字地图。
对于尚未有数据地图的工作区域,通常收集纸质地图,经过数据扫描,转换为数据地图。
扫描分辨率通常设置为200-400dpi。
扫描图通常存在变形,需要利用GIS软件进行几何校正,已达到制图精度要求。
对于早期或常规方法获得的成果图件,在建立数据库及系统分析前,通常也采用图形扫面方法,经系统处理,将纸质图形转换为数字图形.(2)遥感数据源的选择遥感数据源的选择是整个遥感制图工作中最基本和重要的工作。
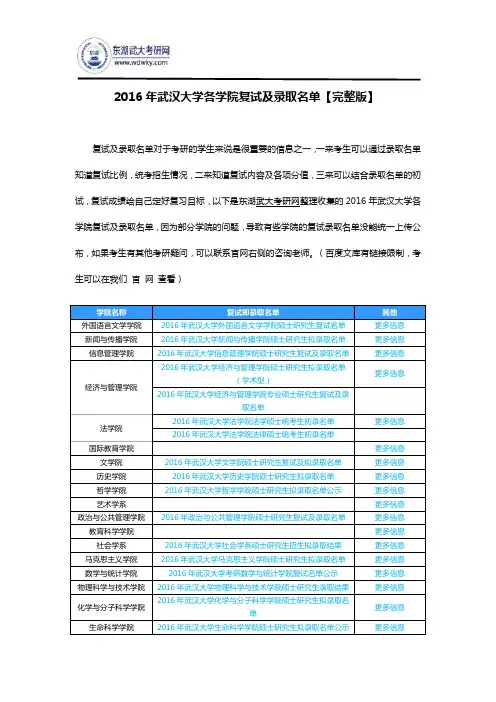
【汇总】2016年武汉大学各学院复试内容介绍武汉大学考研录取包含了初试,复试两个部分,不同的学院复试内容与安排都是不一样的,以下是东湖武大考研网整理收集的【汇总】2016年武汉大学各学院复试内容介绍,考生可以根据复试的内容,要求进行准备,如果有其他考研疑问,可以联系官网右侧的咨询老师。
学院名称复试内容简介外国语言文学学院A.学术学位硕士研究生1.专业课笔试:听力与写作笔试着重考查学生语言的综合运用能力和培养潜力。
2.综合面试面试考查学生的综合素质,着重考查学生对问题理解的深度与广度,对问题进行分析与逻辑推理的严密性以及对所学语言的表达能力。
B.专业学位硕士研究生1.专业课笔试:翻译硕士专业课笔试:听力与写作学科教育(英语)专业课笔试:写作笔试着重考查学生语言的综合运用能力和培养潜力。
2.综合面试翻译硕士:面试考查学生的综合素质,着重考查学生对问题理解的深度与广度,对问题进行分析与逻辑推理的严密性以及英汉语言互译的能力。
学科教育(英语):面试考查学生的综合素质,着重考查学生对问题理解的深度与广度,对问题进行分析与逻辑推理的严密性以及对所学专业的理解与表达能力。
新闻与传播学院复试内容和形式1.专业综合课笔试。
按2016年招生简章的要求进行专业课的笔试,考试时间为2小时,满分为100分。
2.对复试考生的外语听力口语水平测试。
每个听力口语测试小组须配备2名或2名以上主考教师。
主考教师须由精通外语的教师担任。
听力口语测试试题须事先命制若干套。
须按时更换试题。
考生以抽签方式确定听力口试题目。
听力口语测试满分为100分。
口语测试全过程进行录音。
3.专业综合素质面试。
我院按专业组成5个复试小组来组织专业综合素质面试,要有面试情况记录,并认真填写复试记录,面试成绩取平均值。
面试满分为100分,每名考生专业综合素质面试时间约20分钟。
面试全过程将进行录音录像。
综合素质面试是为了更全面了解考生情况,包括考察其综合分析、表达能力,了解其对专业课以外的其他知识的掌握,考察其科研能力和水平,了解其科研成果,如已发表的文章、论文等;还包括对考生思想政治状况的考察,对考生的特长、兴趣爱好等情况的了解。
武汉大学遥感学院介绍:摄影测量与遥感学科是教育部审定的首批全国重点学科。
本科和研究生出国都相对容易,且比例较高。
研究生包括专业硕士学制均为两年,就业方向大概为事业单位(国家部委、地方测绘局、勘测院等)、公司(从事软件开发,收入较高)。
如果想继续深造,摄影测量与遥感、地图制图学与地理信息系统方向还提供了1+4的硕博连读。
整体上来说,包括个人发展、包括就业,武大大学遥感学院是学GIS特别是遥感专业值得一试的学校。
遥感学院复试具体要求:复试和加试采用一票否决权(不合格者取消录取)。
复试成绩满分为500分。
初试成绩(初试总成绩/5*60%)+ 复试成绩(专业笔试*10% +能力测试*13% + 英语听说测试*8% + 综合面试*9%)= 每位考生最终成绩(满分100分)遥感学院复试流程1、笔试:地球空间信息技术基础(专业综合),把初试的参考书有时间再看下,无时间可以看下宁津生的《测绘学概论》。
2、英语(包括口语和听力):实际上是在一起考试的,具体为:几个考试一组或者单个考试,老师用英语说一个题目,然后让大家发表自己的opinion,过程中可能会有自我介绍。
一般也就一二十分钟。
3、面试:一般是五个老师在一起,一人负责记录,然后你进去。
武大的老师一般都不会刁难人,问的问题比较宽泛。
大体分为六个方向,你对专业的认识,该专业现在的热点和趋势,录取以后你的计划,怎样看待科研、大学做过什么、毕业论文是什么。
以09年学长的面试题目为例,1、请你谈谈GIS(或者是遥感、或者是摄影测量)的发展现状、发展趋势?2、请你谈谈你的研究兴趣,如果录取后的研究计划?3、谈谈你对科学研究的态度、你的科研方法?例如当导师给你安排一个任务以后,你如何开展研究工作,如何与人协作,如何解决所遇到的难题?所以大家只需要大大方方,把自己想法说出即可,但个人建议,千万不要不懂装懂,不要撒谎。
复试的各个环节都很重要,特别是面试,遥感院对面试具有一票否决权,希望学弟学妹们要好好准备,把老师可能提问的问题,自己先想个答案出来,而对于不知道怎样回答的问题,一则可以给老师把你所能知道的关于这个问题的想法说出来,二则就委婉的告诉他们你不会。
主点:主平面与主光轴的交点。
景深:物方能够清晰成像的一段距离框标:设置在摄影机焦平面上位置固定的光学或机械标志,用于在焦平面上建立像方坐标系。
航摄倾角:摄影主光轴与铅垂方向的夹角。
像片的重叠度:当相邻的两张像片拍摄景区有重叠 时,重叠部分占整张像片的比例。
航线弯曲度:航线两端像片主点间的直线距离L 与偏离该直线最远的像主点到直线的垂距δ之比。
(要求:<3%)。
航空摄影技术要求:1.航摄倾角<3°。
2.摄影比例尺:航高差|ΔH|≤5%H 。
3.像片的重叠度:(航向重叠度:Px>53% 60~65;旁向重叠度Py>15% 15~30)。
4. 航线弯曲度<3%。
5. 像片旋转角<6°。
投影中心:中心投影射线的汇聚点。
正射投影:投影射线相互平行且与投影平面正交的投影 。
正射影像图:按图幅的具有规定比例尺的(地面)物体的正射投影影像。
像主点:投影中心在投影面上的垂足(主光轴与像平面的交点)。
像底点:过投影中心的铅垂线与像平面的交点。
等角点:像片倾斜角∠osn 的角平分线与像平面的交点。
合点:地平面上无穷远点的中心投影。
像片主距:投影中心到像平面的垂距。
摄影测量常用坐标系:o-zy 像平面坐标系(原点:像主点o ;x 、y 轴:分别平行于p-xy 的坐标轴); S-xyz 像空间坐标系(原点:投影中心S ;x 、y 轴:分别平行于o-xy 的坐标轴;z 轴:主光轴方向(os 方向为正)); S-XYZ 像空间辅助坐标系(原点:投影中心S ;X 、Y 、Z 轴:分别平行于地面摄影坐标系的坐标轴); D-XYZ 地面摄影测量坐标系(原点:测区地面某点D ;X 轴:大致平行航线方向;Z 轴:铅垂向上); T-X t Y t Z t 地面测量坐标(大地坐标系,国家高程基准,左手系)。
内方位元素:确定投影中心相对于像平面位置关系的参数。
(包括:像主点在框标坐标系中坐标(x 0 , y 0),主距 f )。
武汉大学遥感信息工程学院复试机试2004:#include<iostream>#include<fstream>#include<vector>//sort所需头文件#include<algorithm>using namespace std;int main(){ifstream infile("test.txt");ofstream outfile("result.txt");if(!infile){cout<<"text.txt open failed"<<endl;return 1;}if(!outfile){cout<<"result.txt open failed"<<endl;}vector<int>m_vecInt;//读出数的个数int sum = 0;infile>>sum;int i = 0;while(i<sum){int number = 0;infile>>number;m_vecInt.push_back(number);i++;}//排序算法sort(m_vecInt.begin(), m_vecInt.end());outfile<<"the min number is:"<<m_vecInt[0]<<endl; outfile<<"the max number is:"<<m_vecInt[sum - 1]<<endl; int mid = (sum-1)/2;outfile<<"the middle number is:"<<m_vecInt[mid]<<endl; outfile.close();infile.close();return 0;}2005:#include<iostream>#include<fstream>#include<vector>using namespace std;typedef vector<vector<int> >VecInt; VecInt ConvolutionFun1(const vector<int>&vec, const int & m, const int& n);VecInt ConvolutionFun2(const vector<int>&vec, const int&r, const int&s);int main(){const int M =125;const int N =80;const int R =100;const int S =100;VecInt vecInt;int i,j;ifstream infile("SourceData.txt");if(!infile){cout<<"SourceData.txt open failed.\n";return 1;}vector<int>vec_int;int numeric(0);for(i=0;i<10000;i++){infile>>numeric;vec_int.push_back(numeric);}ofstream outfile("result.txt");if(!outfile){cout<<"result.txt open failed.\n";return 1;}outfile<<"卷积一次后的矩阵:\n";vecInt = ConvolutionFun1(vec_int, M, N); for(i=0; i<M; i++){for(j=0; j<N; j++){outfile<<vecInt[i][j]<<" ";}outfile<<'\n';}outfile<<'\n';vecInt = ConvolutionFun2(vec_int, R, S); outfile<<"第二次卷积后的矩阵:\n";for(i=0; i<R; i++){for(j=0; j<S; j++){outfile<<vecInt[i][j]<<" ";}outfile<<'\n';}outfile<<'\n';outfile.close();infile.close();return 0;}//卷积函数1VecInt ConvolutionFun1(const vector<int>&vec, const int&m, const int&n){VecInt vecInt(m, vector<int>(n));int num =0;for(int i=0; i<m; i++){for(int j=0; j<n; j++){vecInt[i][j] = vec[num];num++;}}int a[]={0,-1,0,-1,5,-1,0,-1,0};for(int i=1;i<m-1;i++){for(int j=1;j<n-1;j++){vecInt[i][j] = vecInt[i-1][j-1] * a[0] + vecInt[i-1][j] * a[1] +vecInt[i-1][j+1]* a[2]+ vecInt[i][j-1] * a[3] + vecInt[i][j] * a[4] + vecInt[i][j+1] * a[5] + vecInt[i+1][j-1] * a[6] + vecInt[i+1][j] * a[7] + vecInt[i+1][j+1]* a[8];}}return vecInt;}//卷积函数VecInt ConvolutionFun2(const vector<int>&vec, const int&r, constint&s){VecInt vecInt(r, vector<int>(s));int num =0;for(int i=0; i<r; i++){for(int j=0; j<s; j++){vecInt[i][j] = vec[num];num++;}}int b[]={0,0,-1,0,0,0,-1,-2,-1,0,-1,-2,16,-2,-1,0,-1,-2,-1,0,0,0,-1,0,0};for(int i=2;i<r-2;i++){for(int j=2;j<s-2;j++){vecInt[i][j] = vecInt[i-2][j-2] * b[0] + vecInt[i-2][j-1] * b[1] + vecInt[i-2][j] * b[2] +vecInt[i-2][j+1]* b[3]+ vecInt[i-2][j+2] * b[4]+ vecInt[i-1][j-2] * b[5] + vecInt[i-1][j-1] * b[6] + vecInt[i-1][j] * b[7] +vecInt[i-1][j+1]* b[8]+ vecInt[i-1][j+2] * b[9]+ vecInt[i][j-2] * b[10] + vecInt[i][j-1] * b[11] + vecInt[i][j] *b[12] +vecInt[i][j+1]* b[13]+ vecInt[i][j+2] * b[14]+ vecInt[i+1][j-2] * b[15] + vecInt[i+1][j-1] * b[16] +vecInt[i+1][j] * b[17]+ vecInt[i+1][j+1]* b[18]+ vecInt[i+1][j+2] * b[19]+ vecInt[i+2][j-2] * b[20] + vecInt[i+2][j-1] * b[21] +vecInt[i+2][j] * b[22]+ vecInt[i+2][j+1]* b[23]+ vecInt[i+2][j+2] * b[24] ; }}return vecInt;}20061#include<iostream>//ifstream ofstream头文件#include<fstream>//sqrt,log,cos所需头文件#include<cmath>#include<time.h>#include<vector>//accumulate所需头文件#include<numeric>using namespace std;const int N = 100;const double PI = 3.1415926;int main(){int i;//定义vector<double>对象,存储产生的随机数vector<double>vec_double;vector<double>vec_square_double;//定义输出流对象ofstream outfile("SourceData.txt");if(!outfile){cerr<<"SourceData.txt open failed.\n";return 1;}//随机数产生的开始点srand((unsigned)time(NULL));//产生个随机数for(i=0;i<N;i++){double num = rand()*1.0/RAND_MAX;vec_double.push_back(num);vec_square_double.push_back(num*num);outfile<<num<<" ";}outfile<<'\n';double sum_double = accumulate(vec_double.begin(), vec_double.end(), (double)0.0);double sum_square_double = accumulate(vec_square_double.begin(),vec_square_double.end(), (double)0.0);double average_double = sum_double/N;outfile<<"均值为:\n"<<average_double<<'\n';double variance = (sum_square_double/N)-(average_double*average_double);outfile<<"方差为:\n"<<variance<<'\n';outfile.close();//定义输入流对象ifstream infile("SourceData.txt");if(!infile){cerr<<"SourceData.txt open failed.\n";return 1;}//清空容器vec_double.clear();double num =0.0;vector<double>vec_normalDistibution;vector<double>vec_squre_NorDistibution;for(i=0;i<N;i++){infile>>num;vec_double.push_back(num);double num_normal_distrion = (sqrt((-2)*log(num))*cos(2*PI*num))*0.3 + 1;vec_normalDistibution.push_back(num_normal_distrion);vec_squre_NorDistibution.push_back(num_normal_distrion *num_normal_distrion);}//定义输出路对象outfile2ofstream outfile2("ResultData.txt");if(!outfile){cerr<<"ResultData.txt open failed.\n";return 1;}//输出正太分布数值copy(vec_normalDistibution.begin(), vec_normalDistibution.end(), ostream_iterator<double>(outfile2, " "));outfile2<<'\n';double sum_normalDistibution =accumulate(vec_normalDistibution.begin(),vec_normalDistibution.end(),0.0 );double average_normalDistibution = sum_normalDistibution/N;double sum_squre_NorDistibution =accumulate(vec_squre_NorDistibution.begin(),vec_squre_NorDistibution .end(),0.0);double variance_normalDistibution = sum_squre_NorDistibution/N - (average_normalDistibution *average_normalDistibution);outfile2<<"均值为:\n"<<average_normalDistibution<<'\n';outfile2<<"方差为:\n"<<variance_normalDistibution<<'\n';outfile2.close();infile.close();return 0;}20062:#include<iostream>#include<fstream>#include<vector>#include<numeric>#include<algorithm>using namespace std;typedef vector<vector<double> > VecDouble;double AverageVector(const vector<double> & vecDouble);VecDouble CovariationMatrix(const vector<vector<double> > & vecDouble,const vector<double> & vecAverageDouble,int nBand, int nPiexl);int main(){int nBand;int nPiexl;int i,j;ifstream infile("data.txt");if(!infile){cerr<<"data.txt open failed.\n";return 1;}ofstream outfile("result.txt");if(!outfile){cerr<<"result.txt open failed.\n";return 1;}infile>>nBand>>nPiexl;vector<vector<double> >vec_double(nBand, vector<double>(nPiexl)); for(i=0; i<nBand;i++){for(j =0; j<nPiexl; j++){infile>>vec_double[i][j];}}vector<double>vec_average_double(nBand);for(i=0; i<nBand;i++){vec_average_double[i] = AverageVector(vec_double[i]);}outfile<<"均值向量为:\n";copy(vec_average_double.begin(), vec_average_double.end(), ostream_iterator<double>(outfile, " "));outfile<<'\n';VecDouble vec_covariation_double(nBand, vector<double>(nPiexl));vec_covariation_double = CovariationMatrix(vec_double,vec_average_double, nBand, nPiexl);outfile<<"协方差矩阵:\n";for( i =0; i<nBand; i++){for(j =0; j<nBand; j++){outfile<<vec_covariation_double[i][j]<<" ";}outfile<<'\n';}return 0;}//均值向量函数double AverageVector(const vector<double> & vecDouble) {int size = vecDouble.size();double sum = accumulate(vecDouble.begin(), vecDouble.end(), 0);double average = sum/size;return average;}//协方差矩阵函数VecDouble CovariationMatrix(const vector<vector<double> > & vecDouble,const vector<double> & vecAverageDouble,int nBand, int nPiexl) {VecDouble vec_coveration_double(nBand, vector<double>(nBand));for(int i =0; i<nBand; i++){for(int j =0; j<nBand; j++){double sum =0.0;for(int k=0; k<nPiexl; k++){sum += (vecDouble[i][k] - vecAverageDouble[i])*(vecDouble[j][k] - vecAverageDouble[j]);}vec_coveration_double[i][j] = sum/nPiexl;}}return vec_coveration_double; }20071:#include<iostream>#include<fstream>#include<vector>using namespace std;struct POINT{//标记点号int point_num;//点的坐标double x;double y;POINT(){x = 0.0;y = 0.0;}};int main(){ifstream infile("test.dat");if(!infile){cerr<<"test.dat open failed.\n"; return 1;}int num;infile>>num;vector<POINT>vec_double;int i=0;while(i<num){double x;double y;infile>>x>>y;POINT point;point.x = x;point.y = y;vec_double.push_back(point); i++;}double xMin,yMin,xMax,yMax; xMin = vec_double[0].x;yMin = vec_double[0].y; xMax = vec_double[0].x; yMax = vec_double[0].y;for(i=1; i<num; i++){if(vec_double[i].x<xMin){xMin = vec_double[i].x;}if(vec_double[i].y<yMin){yMin = vec_double[i].y;}if(vec_double[i].x>xMax){xMax = vec_double[i].x;}if(vec_double[i].y>yMax){yMax = vec_double[i].y;}}ofstream outfile("result.txt");if(!outfile){cerr<<"result.txt open failed.\n"; return 1;}outfile<<"外包矩形的坐标为:\n"; outfile<<xMin<<"\t"<<yMin<<'\n';outfile<<xMin<<"\t"<<yMax<<'\n'; outfile<<xMax<<"\t"<<yMin<<'\n'; outfile<<xMax<<"\t"<<yMax<<'\n'; ifstream inpointfile("point.txt"); if(!inpointfile){cerr<<"point.txt open failed.\n"; return 1;}vector<POINT>vec_point;while(!inpointfile.eof()){int num;double x;double y;inpointfile>>num>>x>>y;POINT point;point.point_num = num;point.x = x;point.y = y;vec_point.push_back(point);}int size = vec_point.size();for(i=0; i<size; i++){if(vec_point[i].x>xMin && vec_point[i].x<xMax && vec_point[i].y>yMin && vec_point[i].y<yMax){outfile<<"坐标点"<<vec_point[i].point_num<<"落在矩形外包内部,坐标为:\n";outfile<<vec_point[i].x<<"\t"<<vec_point[i].y<<'\n';}}return 0;}20071:#include<iostream> #include<fstream> #include<vector> using namespace std; struct POINT{//标记点号int point_num;//点的坐标double x;double y;POINT(){x = 0.0;y = 0.0;}};int main(){ifstream infile("test.dat");if(!infile){cerr<<"test.dat open failed.\n"; return 1;}int num;infile>>num;vector<POINT>vec_double;int i=0;while(i<num){double x;double y;infile>>x>>y;POINT point;point.x = x;point.y = y;vec_double.push_back(point);i++;}double xMin,yMin,xMax,yMax; xMin = vec_double[0].x; yMin = vec_double[0].y; xMax = vec_double[0].x; yMax = vec_double[0].y;for(i=1; i<num; i++){if(vec_double[i].x<xMin) {xMin = vec_double[i].x;}if(vec_double[i].y<yMin) {yMin = vec_double[i].y;}if(vec_double[i].x>xMax) {xMax = vec_double[i].x;}if(vec_double[i].y>yMax) {yMax = vec_double[i].y;}}ofstream outfile("result.txt");if(!outfile){cerr<<"result.txt open failed.\n"; return 1;}outfile<<"外包矩形的坐标为:\n"; outfile<<xMin<<"\t"<<yMin<<'\n'; outfile<<xMin<<"\t"<<yMax<<'\n'; outfile<<xMax<<"\t"<<yMin<<'\n'; outfile<<xMax<<"\t"<<yMax<<'\n'; ifstream inpointfile("point.txt"); if(!inpointfile){cerr<<"point.txt open failed.\n"; return 1;}vector<POINT>vec_point;while(!inpointfile.eof()){int num;double x;double y;inpointfile>>num>>x>>y;POINT point;point.point_num = num;point.x = x;point.y = y;vec_point.push_back(point);}int size = vec_point.size();for(i=0; i<size; i++){if(vec_point[i].x>xMin && vec_point[i].x<xMax && vec_point[i].y>yMin && vec_point[i].y<yMax){outfile<<"坐标点"<<vec_point[i].point_num<<"落在矩形外包内部,坐标为:\n";outfile<<vec_point[i].x<<"\t"<<vec_point[i].y<<'\n';}}return 0;}20072:#include <iostream>#include <fstream>#include<vector>using namespace std;typedef vector<vector<int> >VecInt; const int R = 256; const int L = 256;struct Table{int x;double y;Table(){x = 0;y = 0.0;}};int main(){int i, j;double a,b;ifstream infile("r.raw", ios::in|ios::binary);if(!infile){cerr<<"r.raw open failed.\n";return 1;}//int **grey = new int*[R];VecInt vec_int(R, vector<int>(L));/*for(i=0;i<R;i++){grey[i] = new int[L];}*/for(i=0; i<R; i++){for(j=0; j<L; j++){unsigned char c;infile.read((char*)&c, sizeof(char)); int num = c;vec_int[i][j] = num;}}int min, max;min = vec_int[0][0];max = vec_int[0][0];for(i=0; i<R; i++){for(j=0; j<L; j++){if(vec_int[i][j]<min){min = vec_int[i][j];}if(vec_int[i][j]>max){max = vec_int[i][j];}}}a = (double)(255)/(double)(max-min);b = -(min * a);vector<Table>vecTable;for(i=0; i<255; i++){double y = a * i + b;Table tab;tab.x = i;tab.y = y;vecTable.push_back(tab);}ofstream outfile("result.raw", ios::out|ios::binary); if(!outfile){cerr<<"result.raw open failed.\n";return 1;}for(i=0; i<R; i++){for(j=0; j<L; j++){for(int k=0; k<255; k++){if(vec_int[i][j]==vecTable[k].x){unsigned char c;c = vecTable[k].y;outfile.write((char*)&c, sizeof(char)); outfile<<" ";}}outfile<<'\n';}}return 0;}2008:#include<iostream>#include<fstream>#include<vector>#include<algorithm>#include<numeric>using namespace std;int main(){ifstream infile("sourcefile.txt"); ofstream outfile("result.txt");if(!infile){cout<<"sourcefile.txt open failed"<<endl; }if(!outfile){cout<<"result.txt open failed"<<endl;}int total = 0;infile>>total;vector<double>vec_double;vector<double>vec_square;double numeric = 0.0;int i =0;while(i<total){infile>>numeric;vec_double.push_back(numeric);vec_square.push_back(numeric*numeric);i++;}sort(vec_double.begin(),vec_double.end());double average =accumulate(vec_double.begin(),vec_double.end(),0.0)/total;double sum_square = 0.0;for(i=0;i<total;i++){sum_square+=(vec_double[i]-average)*(vec_double[i]-average);}double variance = sum_square/total;outfile<<"the max score is:"<<vec_double[total-1]<<endl;outfile<<"the min score is:"<<vec_double[0]<<endl;outfile<<"the average score is: "<<average<<endl;outfile<<"the variance is:"<<variance<<endl;outfile.close();infile.close();return 0;}2009:#include<iostream>#include<fstream>#include<string>#include<algorithm>using namespace std;int main(){string s;ifstream infile("test.txt");ofstream outfile("result.txt");if(!infile){cout<<"test.txt open failed"<<endl;return 1;}if(!outfile){cout<<"result.txt open failed"<<endl;return 1;}//copy(istream_iterator<char>(infile), istream_iterator<char>(), back_insert_iterator<string>(s));while(!infile.eof()){char ch(0);infile>>ch;s.push_back(ch);}transform(s.begin(), s.end(), s.begin(), toupper);int result[26];int i = 0;for(char c='A';c<'Z';c++){if(s.find(c)!=s.npos){result[i] = count(s.begin(),s.end(),c);}else{result[i] = 0;}outfile<<c<<"\t";outfile<<result[i]<<'\n';//copy(&result[i],&result[i+1],ostream_iterator<int>(outfile,"\n")); i++;}outfile.close();infile.close();return 0;}2011:#include<iostream>#include<fstream>#include<vector>#include<cmath>#include<algorithm> #include<numeric>using namespace std;struct POINT{double x;double y;POINT(){x = 0;y = 0;}};typedef vector<vector<POINT> > VecPoint;//计算面积函数double polygonarea(const vector<POINT> &vec_point); //计算周长函数double polygongirth(const vector<POINT> &vec_point); int main(){ifstream infile("Input.txt");if(!infile){cerr<<"Input.txt open failed.\n"; return 1;}ofstream outfile("result.txt");if(!outfile){cerr<<"result.txt open failed.\n"; return 1;}outfile.precision(3);int num;infile>>num;int i;int j;VecPoint vecpoint(num);double numeric1(0);double numeric2(0);char c1(0);char c2(0);for(i=0; i<num; i++){for(j=0;;j++){infile>>numeric1>>c1>>numeric2;POINT point;point.x = numeric1;point.y = numeric2;vecpoint[i].push_back(point);if(j!=0 && vecpoint[i][j].x==vecpoint[i][0].x && vecpoint[i][j].y==vecpoint[i][0].y){break;}infile>>c2;}}vector<double>vec_area;vector<double>vec_grith;for(i=0; i<num; i++){double area = polygonarea(vecpoint[i]);vec_area.push_back(area);double grith = polygongirth(vecpoint[i]);vec_grith.push_back(grith);}double minArea = vec_area[0]; int minAreaID;double maxArea = vec_area[0]; int maxAreaID;double minGrith = vec_grith[0]; int minGrithID;double maxGrith = vec_grith[0]; int maxGrithID;for(i =0; i<num; i++){if(vec_area[i]<minArea){minArea = vec_area[i]; minAreaID = i;}if(vec_area[i]>maxArea){maxArea = vec_area[i]; maxAreaID = i;}if(vec_grith[i]<minGrith){minGrith = vec_grith[i]; minGrithID = i;}if(vec_grith[i]>maxGrith){maxGrith = vec_grith[i];maxGrithID = i;}}outfile<<"第"<<maxAreaID<<"多变形面积最大"<<fixed<<maxArea<<'\n'; outfile<<"第"<<minAreaID<<"多变形面积最小"<<fixed<<minArea<<'\n'; outfile<<"第"<<maxGrithID<<"多变形周长最长"<<fixed<<maxGrith<<'\n'; outfile<<"第"<<minGrithID<<"多变形周长最小"<<fixed<<minGrith<<'\n'; double sumArea = accumulate(vec_area.begin(), vec_area.end(), 0.0); double averageArea = sumArea/num;double sumDeviation = 0.0;double staDeviation;for(i=0;i<num;i++){sumDeviation += (vec_area[i]-averageArea)*(vec_area[i]-averageArea); }double sumStadardDevitation = sqrt(sumDeviation/num);int a=0;int b=0;int c=0;int d=0;for(i=0;i<num;i++){if(vec_area[i]>(averageArea + sumStadardDevitation)){a++;}if((vec_area[i]<(averageArea +sumStadardDevitation))&&(vec_area[i]>averageArea)) {b++;}if((vec_area[i]<averageArea)&&(vec_area[i]>(averageArea - sumStadardDevitation))){c++;}if(vec_area[i]<(averageArea - sumStadardDevitation)){d++;}}outfile<<"A类"<<a<<'\n';outfile<<"B类"<<b<<'\n';outfile<<"C类"<<c<<'\n';outfile<<"D类"<<d<<'\n';return 0;}//计算面积函数double polygonarea(const vector<POINT> &vec_point) {double polygon_area = 0.0;int size = vec_point.size();for(int i =0; i<size-1; i++){polygon_area+= ((vec_point[i+1].y -vec_point[i].y)*(vec_point[i+1].x + vec_point[i].x)/2);}return polygon_area;}//计算周长函数double polygongirth(const vector<POINT> &vec_point){double polygon_grith = 0.0;int size = vec_point.size();for(int i =0; i<size-1; i++){double grith = (vec_point[i+1].y - vec_point[i].y)*(vec_point[i+1].y - vec_point[i].y) +(vec_point[i+1].x - vec_point[i].x)*(vec_point[i+1].x - vec_point[i].x);polygon_grith += sqrt((double)grith);}return polygon_grith;}20112#include<iostream>#include<fstream>#include<vector>#include<math.h>using namespace std;struct POINT{int x;int y;POINT(){x = 0;y = 0;}};int main(){const double distance = 4;int num;num =0;double dis = 0.0;ifstream infile("sample.txt");if(!infile){cout<<"sample.txt open failed"<<endl;return 1;}infile>>num;vector<vector<struct POINT> >PtrVector(num); vector<POINT>p(num);for(int i = 0; i<num; i++){infile>>p[i].x>>p[i].y;}infile.close();PtrVector[0].push_back(p[0]);//计数器int n = 1;for(int i = 0; i<num; i++){double*d = new double[i];for(int j = 0;j<n;j++){d[j] = sqrt((double)(p[i].x -PtrVector[j].at(0).x)*(p[i].x -PtrVector[j].at(0).x)+(p[i].y-PtrVector[j].at(0).y)*(p[i].y -PtrVector[j].at(0).y));}double Min = d[0];int m = 0;for(int j = 0;j<n;j++){if(Min>d[j]){Min = d[j];m=j;}}if(Min>distance){PtrVector[n].push_back(p[i]);n++;}else{PtrVector[m].push_back(p[i]);struct POINT point;for(int i =0; i<PtrVector[m].size();i++){point.x += PtrVector[m].at(i).x;point.y += PtrVector[m].at(i).y;}point.x = point.x/PtrVector[m].size();point.y = point.y/PtrVector[m].size();PtrVector[m][0].x = point.x;PtrVector[m][0].y = point.y;}}ofstream outfile("result.txt");if(!outfile){cout<<"result.txt open failed"<<endl;}for(int i = 0; i<n; i++){outfile<<'('<<PtrVector[i].at(0).x<<','<<PtrVector[i].at(0).y<<")的坐标为:"<<endl;for(int j = 1; PtrVector[i].size();j++){outfile<<PtrVector[i].at(j).x<<','<<PtrVector[i].at(j).y<<' ';}outfile<<endl; }outfile.close(); return 0;}。
武⼤遥感院复试上机题(04-12年)04年⼀、问题1. 现有⼀数组,其元素值见⽂件test.txt ,要求通过编程的⽅法求出这组数中值最⼤的元素、值最⼩的元素和中值元素。
结果通过编程的⽅法写⼊⽂本⽂件中输出。
数据源⽂件的结构说明如下:a) ⽂件中的第⼀⾏为数组中元素总数(不包括⾃⾝所在⾏),第⼀⾏不参与运算。
b) 从第⼆⾏起为数组中的元素取值。
c) 中值,即数组中元素按照⼀定顺序排序后,位于中间的数即为该数组的中值。
如,数组{13,5,8,14,22,37,26,19,11}的中值为14。
⼆、要求1. 程序可以采⽤⾃⼰熟悉的语⾔(VC 、VB 或TC )编写。
2. ⽤180分钟的时间独⽴完成任务。
3. 考试结束需要提交以下材料①提交全部源码及相关⽂件(要求源码可以运⾏)②算法实现的核⼼代码及结果以独⽴⽂件(⽂本⽂件)上交。
③提交使⽤说明⽂档⼀份(要求在该说明的指导下可以得出对应的结果)。
说明:类同代码,每⼈各从其总得分钟扣除20分。
05年请⽤VC 、VB 或其他⾼级程序设计语⾔编写以下程序。
1. 编写卷积运算函数;2. 编写调试程序从磁盘的数据⽂件“SourceData.txt ”中读⼊10000个数据,先理解为125×80的矩阵,使⽤卷积矩阵1进⾏卷积,再理解为100×100的矩阵,使⽤卷积矩阵2进⾏卷积。
----010151010 ??------------001000121012162101210001003. 计算结果以⽂本⽂件格式存放到⾃⼰新建的结果⽂件中。
备注:卷积,⽤卷积模板B (l ×k )对A 矩阵(m ×n )进⾏卷积卷积矩阵1卷积矩阵2mn m m n n a a a a a a a a a 212222111211?lk l l k k b b b b b bb b b 212222111211 卷积结果为:jj ii l ii k jj jj kj ii l i ij b a c ,112,2?=∑∑==+-+- 例:由卷积模板B (3×3)对A 矩阵(5×6)进⾏卷积得到结果矩阵CBC 中的元素c 33为:33443243314223342233213213241223112233b a b a b a b a b a b a b a b a b a c ?+?+?+?+?+?+?+?+?=06年请⽤VC 或C 编写以下程序:正态分布随机数的产⽣。
2016遥感院复试
注:遥感院复试包括笔试、英语面试、综合面试、机试。
1.笔试题(占10%,比较拉分)
注:以下论述题为8选5,任选5道作答。
(1,2,3为摄影测量题目,4,5,6为GIS题目,7,8为遥感题目)
1.以相关系数法影像匹配为例,说明目前影像匹配的问题有哪些方面?怎么解决?
2.解释多基线摄影测量,举例说明其应用?
3.记不清了
4.大数据的特点及其在GIS中的应用?
5.网络GIS的结构特点,并比较说明网络GIS不同计算模式的特点?
6.简介现有的网络存储技术,及其在GIS中的应用?
7.说明光谱特征曲线与光谱响应曲线的含义、联系与区别?
8.说明监督分类与非监督分类的优缺点,怎样处理能使分类效果更好?
2.上机题(最拉分的部分,所占比重最大13%)
将15张相片(宽1280列)合成一幅合成影像(宽30000),合成影像的灰度值可由双三次卷积插值法获得,合成影像某一灰度值由原相片第j张的i,i+1之间灰度值获得,文档image.txt中存储了i-2,i-1,i,i+1,i+2,i+3列的灰度值。
任选一种编程工具(VC,VB,VS)实现:
(1)求出合成影像13640处的灰度值
(2)输出i,j,13640处的灰度值到result.txt中
3.综合面试(9%)
随机发问与专业相关的问题,没有套路可言。
比较关注学生的编程能力,有没有做过项目。
4.英语面试(8%)
自我介绍,为什么考研,为什么考武汉大学,家乡,爱好等问题。
英语拉不开分,分数基本都一样。