DDV伺服阀说明书
- 格式:pdf
- 大小:6.09 MB
- 文档页数:11
MOOGMOOG( 穆格 )DDV 伺服阀MOOG( 穆格 )D633 、 D634 系列伺服阀是 MOOG 公司最新研制成功的新型电液伺服阀,目前已由 MOOG GmbH( 德国 ) 公司进行批量生产。
它是一种直接驱动式伺服阀,简称DDV(Direct Drive Servo Valve 的缩写 ),油口与安装尺寸D633 按 NG6(Cetop 3),D634 按NG10(Cetop 5) ,用集成电路实现阀芯位置的闭环控制,阀芯的驱动装置是永磁直线力马达。
对中弹簧使阀芯保持在中位,直线力马达克服弹簧的对中力使阀芯在两个方向都可偏离中位,平衡在一个新的位置,这样就解决了比例电磁线圈只能在一个方向产生力的不足之处。
阀芯位置闭环控制电子线路与脉宽调制(PWM )驱动电子线路固化为一块集成块,用特殊的连接技术固定在伺服阀内,因此 D633、D634 系列伺服阀无需配套电子装置就能对其进行控制。
D633、 D634 系列伺服阀是MOOG 公司对其经久考验,盛名于世的双喷嘴力反馈两级伺服阀的发展与补充,和传统的MOOG30 、31、 32、 34、 35、E760 等系列伺服阀相比,其最大的区别在于D633、D634 系列伺服阀从结构上取消了喷嘴一挡板前置级、用大功率的直线力马达替代了小功率的力矩马达,用先进的集成块与微型位置传感器替代了工艺复杂的机械反馈装置—力反馈杆与弹簧管,从而简化了结构,提高了可靠性,大大地降低了制造成本,却保持了带喷挡前置级的两级伺服阀的基本性能与技术指标。
MOOG DDV 伺服阀的特点1.在位置、速度、压力以及力电液伺服系统中可用二位二通、三位三通或三位四通的方式进行工作。
2.安装形式与尺寸符合DIN24340 和 cetop3 与 6。
3.无液压前置级。
4.停电、电缆损坏、或者紧急停车情况下伺服阀均能自行回中,无需外力推动。
5.动态性能指标与供油压无关。
6.防水性为IP65(DIN40050) 级。

伺服阀的使用1、伺服阀的使用:设备选用的伺服阀均有自己的特点,在使用中需严格按照该种伺服阀的使用说明书要求进行操作。
一般来说,射流管式伺服阀要求用户不能拆卸伺服阀体,只能冲洗伺服阀的精密过滤器。
有些型号的伺服阀在用户处则可以进行整体拆洗,但拆卸的人员必须经过专业的技能培训才行。
伺服阀的装拆应在尽可能干净的环境中进行,拆装前对伺服液压系统停机,操作时应先取下连接到伺服阀上的电气信号插头,再卸掉伺服液压系统的剩余压力,然后拆下伺服阀。
在洁净的90、93、97号汽油中清洗所有的零件,对阀体一些清洁不到的地方,可以采用大号塑料外壳的医用注射器吸取汽油进行多次注射冲洗,零件清洗后可以晾干或用软气管以洁净、干燥的空气吹干。
(特别注意:不要采用玻璃管的注射器进行相关操作,因为玻璃管注射器在经过汽油的浸泡后容易碎裂,造成不安全的事故发生。
)清洗后的伺服阀,一定要放在洁净的环境中使其不要受到二次污染。
安装、拆卸冲洗板时也要与伺服阀一样,特别注意环境的洁净度,这样可以保障系统经过冲洗后的洁净度,才能保障伺服阀的耐用和控制的准确性。
伺服阀的精度等级较高,价格也较高,对其进行操作时需要特别小心细致,以防止在拆装过程中对其损坏。
伺服阀的过滤器、过滤芯可采用干净的90、93、97号汽油冲洗,对杂质和污染物多的过滤器滤芯也只能进行反复多次冲洗,不可对其采取火烧的办法来处理,假如采用火烧一些纤维状的物质碳化后会夹在过滤器中,容易使过滤器发生更进一步的堵塞,影响过滤器的使用,导致伺服阀的性能下降,严重时会导致伺服阀失效。
有一类过滤器是采用塑料材料制成的,假如采用火烧的办法,将使过滤器彻底报废。
⑶伺服阀使用的注意事项:①由于每种型号的伺服阀都有其额定的电压、液压等级;因此禁止伺服阀在超过额定电压、液压等级的条件下使用。
②禁止使用未经过滤的液压油,更不能使用其他不合格的液压油。
③禁止在伺服阀周围使用明火,同时也禁止其在高温状态下工作(使用环境要求见伺服阀说明书)。
一、项目提出的背景1.1 汽轮机'>300MW汽轮机电液控制系统洛阳首阳山电厂二期2x汽轮机'>300MW汽轮机为日立公司TCDF-33.5亚临界压力、中间再热、双缸双排汽、冲动、凝汽式汽轮机,于1995年12月和1996年3月投产。
汽轮机调节系统为数字电液调节(D—EHG),采用低压汽轮机油电液调节。
执行机构的设置为1个高压油动机带动4个高压调速汽门,2个中压油动机带动2个中压调速汽门。
每个油动机由一个电液伺服阀控制,1台汽轮机的3个油动机(CV、左右侧ICV)的电液伺服阀均为日本制造的Abex415型电液伺服阀。
控制油和润滑油均采用同一油源即主油箱内的N32号防锈汽轮机油,在控制油路上安装一精密滤网(精度为51μm)。
1.2 存在问题首阳LU电厂3、4号机组从1995年试运开始,机组启动冲转过程中经常出现油动机突然不动的现象,经检查控制系统正常,信号传输正常,均为伺服阀故障所致,伺服阀更换后调节系统恢复正常。
机组在带负荷稳定运行和中压调节门活动试验日寸,也出现油动机不动的情况及油动机全开或全关的现象,检查均为伺服阀故障。
伺服阀出现故障必须进行更换,而这种调节系统设计形式伺服阀无法隔离,只能被迫停机更换。
首阳山电厂3、4号机组由于伺服阀原因造成的停机:2000年分别为8次、5次,2001年分别为1次、2次;截止到2002年6月仅3号机组由于伺服阀原因造成的停机就达4次。
对拆下来的故障伺服阀进行检查,发现其内部滤芯堵塞、喷嘴堵塞、滑阀卡涩。
伺服阀内部滤芯堵塞引起伺服阀前置级控制压力过低,不能控制伺眼阀的第2级滑阀运动,致使油动机拒动(对控制信号不响应);喷嘴堵塞油动机关闭;伺服阀卡涩,使油动机保持在全开或全关位置。
油质污染是造成上述故障的主要原因,油质污染造成伺阀卡涩的故障占伺服阀故障的85%[1]。
1.3 油质状况及防止伺服阀卡涩的措施由于3、4号机组试运时就经常发生伺服阀卡涩,移交生产后首阳山电厂对油质就非常重视,1996年成立了滤油班加强滤油管理,提高油质清洁度。
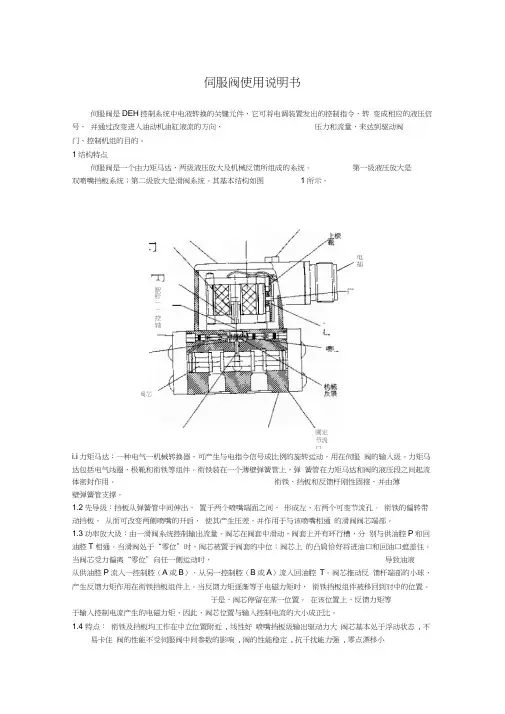
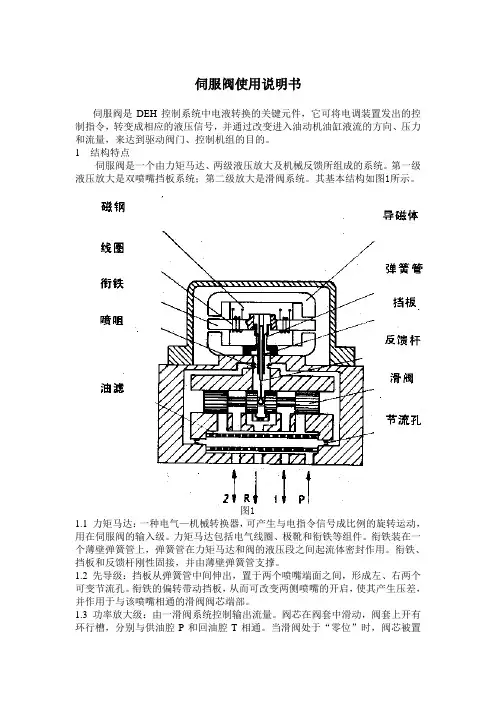
伺服阀使用说明书伺服阀是DEH 控制系统中电液转换的关键元件,它可将电调装置发出的控制指令,转 变成相应的液压信号, 并通过改变进入油动机油缸液流的方向、压力和流量,来达到驱动阀门、控制机组的目的。
1结构特点伺服阀是一个由力矩马达、两级液压放大及机械反馈所组成的系统。
第一级液压放大是 双喷嘴挡板系统;第二级放大是滑阀系统。
其基本结构如图 1所示。
i.i 力矩马达:一种电气一机械转换器,可产生与电指令信号成比例的旋转运动,用在伺服 阀的输入级。
力矩马达包括电气线圈、极靴和衔铁等组件。
衔铁装在一个薄壁弹簧管上,弹 簧管在力矩马达和阀的液压段之间起流体密封作用。
衔铁、挡板和反馈杆刚性固接,并由薄壁弹簧管支撑。
1.2先导级:挡板从弹簧管中间伸出, 置于两个喷嘴端面之间, 形成左、右两个可变节流孔。
衔铁的偏转带动挡板, 从而可改变两侧喷嘴的开启, 使其产生压差,并作用于与该喷嘴相通 的滑阀阀芯端部。
1.3功率放大级:由一滑阀系统控制输出流量。
阀芯在阀套中滑动,阀套上开有环行槽,分 别与供油腔P 和回油腔T 相通。
当滑阀处于“零位”时,阀芯被置于阀套的中位;阀芯上 的凸肩恰好将进油口和回油口遮盖住。
当阀芯受力偏离“零位”向任一侧运动时, 导致油液 从供油腔P 流入一控制腔(A 或B ),从另一控制腔(B 或A )流入回油腔 T 。
阀芯推动反 馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。
当反馈力矩逐渐等于电磁力矩时, 衔铁挡板组件被移回到对中的位置。
于是,阀芯停留在某一位置。
在该位置上,反馈力矩等 于输入控制电流产生的电磁力矩,因此,阀芯位置与输入控制电流的大小成正比。
1.4 特点: 衔铁及挡板均工作在中立位置附近 , 线性好 喷嘴挡板级输出驱动力大 阀芯基本处于浮动状态 , 不易卡住 阀的性能不受伺服阀中间参数的影响 , 阀的性能稳定 , 抗干扰能力强 , 零点漂移小 圃定节流口 F芯阀F駅肝—— 控轴畫的出逵电插2 工作原理:当力矩马达没有电信号输入时,衔铁位于极靴气隙中间,平衡永久磁铁的磁性力。

版本号:B东方汽轮机厂电液伺服阀控制器说明书编号:M902-007000BSM第全册2003年12月编号:M902-007000BSM编希H: _______________校对: -------------------审核: ___________________会签: ------------------- 审定: ---------------------批准: _____________________修改记录表骨口. 序号—Hr*章一节名称页数备注11、, 、.前言122硬件简介1 33功能简介2 44使用说明9 55故障指示2 66性能和参数1 77使用注意说明1DEA伺服卡是为全电调控制系统DEH配套而专门设计的。
该卡采用了16 位单片机80C196芯片和高性能的可编程逻辑阵列CPLD构成控制核心,同时采用了16位A/D和D/A芯片提高转换精度。
电源部分采用了先进的DC-DC隔隔离转换器,确保卡件的工作电源和供电电源的充分隔离,使卡件的电源回路工作有效可靠。
在实现带电插拔的技术上采用了飞利浦的i2c串行总线技术,在校验过程中将LVDT的全关值和全开值存入E2PROM中,从而实现带电插拔。
伺服卡的工作原理是通过采集LVDT勺测量值与控制系统发出的给定值构成比较环节,然后通过Pi 运算,最终输出调节电流控制调节阀门的运动,使阀门的开度到达给定期望到达的位置。
2 硬件简介伺服卡控制器的硬件主要包括伺服卡件和机箱组件:2.1 伺服卡件伺服卡采用的是四层印制板布线工艺,具有极高的EMC抗干扰能力。
板上主要元器件均采用进口优质元件。
2.1.1 CPU采用INTEL先进的16位单片机80C196,运算处理速度极快。
该单片机内置WATCH_DOG能,自恢复能力强。
2.1.2 采用Xilinx 公司的可编程逻辑阵列XC95108作为单片机的接口部件。
该芯片可以将众多的硬逻辑功能用软件实现,访问速度极快。
伺服系列使用说明书一、伺服马达控套装综述 (3)1.1 套件清单 (3)1.2、功能简介: (3)1.3套件的试用方法: (4)二、24路伺服马达控制板 (5)2.1伺服马达接插端口 (5)2.2、各接口参数 (6)2.2.1、电源接口(A) (6)2.2.2电源开关(B) (7)2.2.3运行按钮(C) (7)2.2.4复位按钮(F) (7)2.2.5标准通讯端口(E) (8)2.3伺服马达控制板通讯协议 (8)2.4运行方式 (8)三、伺服马达控制软件Mini Servo (9)3.1、软件界面说明 (9)3.2、拖动杆 (9)3.3、命令行按钮 (9)3.4、伺服马达运行速度控制 (10)3.5、函数的编写与调用 (10)3.6、在线仿真 (11)四、具体的调试步骤 (12)4.1硬件连接(步骤1) (12)4.2软件设置(步骤2) (13)4.3、编写动作表、在线仿真(步骤3) (14)4.4、下载、运行动作表(步骤4) (16)五、调试的常见问题 (17)5.1、如何把demo动作表用在新安装的机器人上 (17)5.2、如何接入各种传感器 (18)5.2.1、24路伺服板的通信协议 (18)5.2.2、通过RCU进行传感器的接入 (19)5.2.3、硬件的连接 (20)5.2.4、程序的编写 (20)5.3、影响伺服马达控制的因素(电源等) (21)5.3.1、伺服马达运行的速度: (21)5.3.2、伺服马达的抖动问题 (21)5.3.3、电源不稳定引起伺服马达板重启 (21)5.3.4、如何解决抖动问题 (21)5.3.5、电源电压选择建议 (22)六、使用时候注意事项: (22)一、伺服马达控套装综述1.1 套件清单JMC-CB-1303微型伺服马达套装是一套完整的伺服马达控制套件。
它包括如下几部分。
BE-5233 BE-9200 SW-0201 新24路伺服马达控制板电脑通讯电缆伺服系列软件光盘实物图如下:1.2、功能简介:JMP-CB-1303微型伺服马达套装是是一套完整的伺服马达控制套装。
伺服阀使用说明书伺服阀是DEH控制系统中电液转换的关键元件,它可将电调装置发出的控制指令,转变成相应的液压信号,并通过改变进入油动机油缸液流的方向、压力和流量,来达到驱动阀门、控制机组的目的。
1 结构特点伺服阀是一个由力矩马达、两级液压放大及机械反馈所组成的系统。
第一级液压放大是双喷嘴挡板系统;第二级放大是滑阀系统。
其基本结构如图1所示。
图11.1 力矩马达:一种电气—机械转换器,可产生与电指令信号成比例的旋转运动,用在伺服阀的输入级。
力矩马达包括电气线圈、极靴和衔铁等组件。
衔铁装在一个薄壁弹簧管上,弹簧管在力矩马达和阀的液压段之间起流体密封作用。
衔铁、挡板和反馈杆刚性固接,并由薄壁弹簧管支撑。
1.2 先导级:挡板从弹簧管中间伸出,置于两个喷嘴端面之间,形成左、右两个可变节流孔。
衔铁的偏转带动挡板,从而可改变两侧喷嘴的开启,使其产生压差,并作用于与该喷嘴相通的滑阀阀芯端部。
1.3 功率放大级:由一滑阀系统控制输出流量。
阀芯在阀套中滑动,阀套上开有环行槽,分别与供油腔P和回油腔T相通。
当滑阀处于“零位”时,阀芯被置于阀套的中位;阀芯上的凸肩恰好将进油口和回油口遮盖住。
当阀芯受力偏离“零位”向任一侧运动时,导致油液从供油腔P流入一控制腔(A或B),从另一控制腔(B或A)流入回油腔T。
阀芯推动反馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。
当反馈力矩逐渐等于电磁力矩时,衔铁挡板组件被移回到对中的位置。
于是,阀芯停留在某一位置。
在该位置上,反馈力矩等于输入控制电流产生的电磁力矩,因此,阀芯位置与输入控制电流的大小成正比。
1.4 特点:●衔铁及挡板均工作在中立位置附近,线性好●喷嘴挡板级输出驱动力大●阀芯基本处于浮动状态,不易卡住●阀的性能不受伺服阀中间参数的影响,阀的性能稳定,抗干扰能力强,零点漂移小2 工作原理:当力矩马达没有电信号输入时,衔铁位于极靴气隙中间,平衡永久磁铁的磁性力。
当有欲使调节阀动作的电气信号由伺服放大器输入时,力矩马达的线圈中有电流通过,产生一磁场,在磁场作用下,产生偏转力矩,使衔铁旋转,同时带动与之相连的挡板转动,此挡板伸到两个喷嘴中间。
伺服阀使用说明书伺服阀是DEH控制系统中电液转换的关键元件,它可将电调装置发出的控制指令,转变成相应的液压信号,并通过改变进入油动机油缸液流的方向、压力和流量,来达到驱动阀门、控制机组的目的。
1 结构特点伺服阀是一个由力矩马达、两级液压放大及机械反馈所组成的系统。
第一级液压放大是双喷嘴挡板系统;第二级放大是滑阀系统。
其基本结构如图1所示。
图11.1 力矩马达:一种电气—机械转换器,可产生与电指令信号成比例的旋转运动,用在伺服阀的输入级。
力矩马达包括电气线圈、极靴和衔铁等组件。
衔铁装在一个薄壁弹簧管上,弹簧管在力矩马达和阀的液压段之间起流体密封作用。
衔铁、挡板和反馈杆刚性固接,并由薄壁弹簧管支撑。
1.2 先导级:挡板从弹簧管中间伸出,置于两个喷嘴端面之间,形成左、右两个可变节流孔。
衔铁的偏转带动挡板,从而可改变两侧喷嘴的开启,使其产生压差,并作用于与该喷嘴相通的滑阀阀芯端部。
1.3 功率放大级:由一滑阀系统控制输出流量。
阀芯在阀套中滑动,阀套上开有环行槽,分别与供油腔P和回油腔T相通。
当滑阀处于“零位”时,阀芯被置于阀套的中位;阀芯上的凸肩恰好将进油口和回油口遮盖住。
当阀芯受力偏离“零位”向任一侧运动时,导致油液从供油腔P流入一控制腔(A或B),从另一控制腔(B或A)流入回油腔T。
阀芯推动反馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。
当反馈力矩逐渐等于电磁力矩时,衔铁挡板组件被移回到对中的位置。
于是,阀芯停留在某一位置。
在该位置上,反馈力矩等于输入控制电流产生的电磁力矩,因此,阀芯位置与输入控制电流的大小成正比。
1.4 特点:●衔铁及挡板均工作在中立位置附近,线性好●喷嘴挡板级输出驱动力大●阀芯基本处于浮动状态,不易卡住●阀的性能不受伺服阀中间参数的影响,阀的性能稳定,抗干扰能力强,零点漂移小2 工作原理:当力矩马达没有电信号输入时,衔铁位于极靴气隙中间,平衡永久磁铁的磁性力。
当有欲使调节阀动作的电气信号由伺服放大器输入时,力矩马达的线圈中有电流通过,产生一磁场,在磁场作用下,产生偏转力矩,使衔铁旋转,同时带动与之相连的挡板转动,此挡板伸到两个喷嘴中间。
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
MOOG(穆格)DDV伺服阀MOOG(穆格)D633、D634系列伺服阀是MOOG公司最新研制成功的新型电液伺服阀,目前已由MOOG GmbH(德国)公司进行批量生产。
它是一种直接驱动式伺服阀,简称DDV(Direct Drive Servo Valve的缩写),油口与安装尺寸D633按NG6(Cetop 3),D634按NG10(Cetop 5),用集成电路实现阀芯位置的闭环控制,阀芯的驱动装置是永磁直线力马达。
对中弹簧使阀芯保持在中位,直线力马达克服弹簧的对中力使阀芯在两个方向都可偏离中位,平衡在一个新的位置,这样就解决了比例电磁线圈只能在一个方向产生力的不足之处。
阀芯位置闭环控制电子线路与脉宽调制(PWM)驱动电子线路固化为一块集成块,用特殊的连接技术固定在伺服阀内,因此D633、D634系列伺服阀无需配套电子装置就能对其进行控制。
D633、D634系列伺服阀是MOOG公司对其经久考验,盛名于世的双喷嘴力反馈两级伺服阀的发展与补充,和传统的MOOG30、31、32、34、35、E760等系列伺服阀相比,其最大的区别在于D633、D634系列伺服阀从结构上取消了喷嘴一挡板前置级、用大功率的直线力马达替代了小功率的力矩马达,用先进的集成块与微型位置传感器替代了工艺复杂的机械反馈装置—力反馈杆与弹簧管,从而简化了结构,提高了可靠性,大大地降低了制造成本,却保持了带喷挡前置级的两级伺服阀的基本性能与技术指标。
MOOG DDV伺服阀的特点1.在位置、速度、压力以及力电液伺服系统中可用二位二通、三位三通或三位四通的方式进行工作。
2.安装形式与尺寸符合DIN24340和cetop3与6。
3.无液压前置级。
4.停电、电缆损坏、或者紧急停车情况下伺服阀均能自行回中,无需外力推动。
5.动态性能指标与供油压无关。
6.防水性为IP65(DIN40050)级。
7.低的滞环,高的分辨率。
8.具有极性接反保护功能与超压保护功能。