连杆机构大作业题目.
- 格式:doc
- 大小:544.00 KB
- 文档页数:15
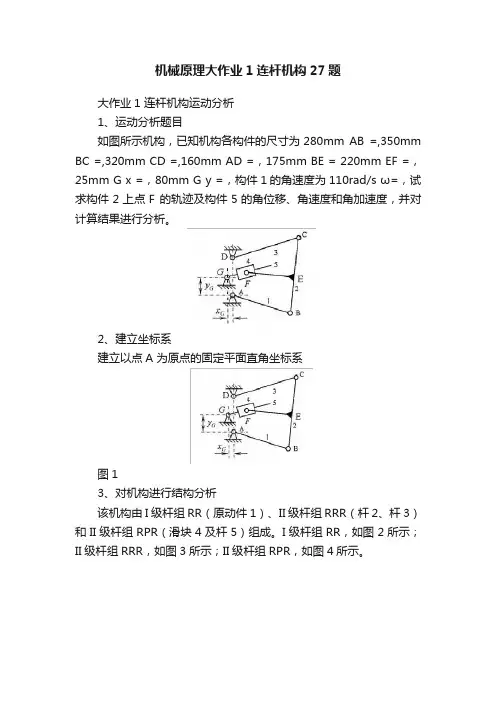
机械原理大作业1连杆机构27题大作业1 连杆机构运动分析1、运动分析题目如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
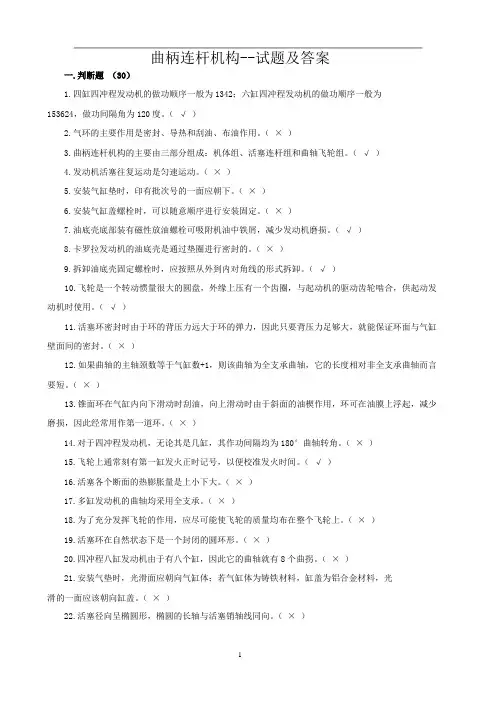
2、建立坐标系建立以点A 为原点的固定平面直角坐标系图13、对机构进行结构分析该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。
I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。
图2图 3图 44、各基本杆组运动分析的数学模型(1)同一构件上点的运动分析:图 5如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
=cos =280cos B i x l ??; =sin =280sin B i y l ??;==-sin =-BxB i B dx v l y dt ω?ω; ==cos =;B yB i B dyv l x dt ω?ω222B 2==-cos =-BxB i d x a l x dt ω?ω;2222==-sin =-ByB i B d y a l y dtω?ω。
(2)RRRII 级杆组的运动分析:图 6如图6所示是由三个回转副和两个构件组成的II 级组。
已知两杆的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。
曲柄连杆机构--试题及答案一.判断题(30)1.四缸四冲程发动机的做功顺序一般为1342;六缸四冲程发动机的做功顺序一般为153624,做功间隔角为120度。
(√ )2.气环的主要作用是密封、导热和刮油、布油作用。
(×)3.曲柄连杆机构的主要由三部分组成:机体组、活塞连杆组和曲轴飞轮组。
(√ )4.发动机活塞往复运动是匀速运动。
(× )5.安装气缸垫时,印有批次号的一面应朝下。
(× )6.安装气缸盖螺栓时,可以随意顺序进行安装固定。
(× )7.油底壳底部装有磁性放油螺栓可吸附机油中铁屑,减少发动机磨损。
(√ )8.卡罗拉发动机的油底壳是通过垫圈进行密封的。
(× )9.拆卸油底壳固定螺栓时,应按照从外到内对角线的形式拆卸。
(√ )10.飞轮是一个转动惯量很大的圆盘,外缘上压有一个齿圈,与起动机的驱动齿轮啮合,供起动发动机时使用。
(√ )11.活塞环密封时由于环的背压力远大于环的弹力,因此只要背压力足够大,就能保证环面与气缸壁面间的密封。
(× )12.如果曲轴的主轴颈数等于气缸数+1,则该曲轴为全支承曲轴,它的长度相对非全支承曲轴而言要短。
(× )13.锥面环在气缸内向下滑动时刮油,向上滑动时由于斜面的油楔作用,环可在油膜上浮起,减少磨损,因此经常用作第一道环。
(× )14.对于四冲程发动机,无论其是几缸,其作功间隔均为180°曲轴转角。
(× )15.飞轮上通常刻有第一缸发火正时记号,以便校准发火时间。
(√ )16.活塞各个断面的热膨胀量是上小下大。
(× )17.多缸发动机的曲轴均采用全支承。
(× )18.为了充分发挥飞轮的作用,应尽可能使飞轮的质量均布在整个飞轮上。
(× )19.活塞环在自然状态下是一个封闭的圆环形。
(× )20.四冲程八缸发动机由于有八个缸,因此它的曲轴就有8个曲拐。
平面连杆机构一、填空:1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。
2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。
3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。
4.铰链四杆机构有曲柄的条件〔1〕连架杆和机架中必有一杆是最短杆;〔2〕最短杆与最长杆长度之和小于或等于其它两杆长度之和。
(用文字说明)5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用式子说明它构成曲柄摇杆机构的条件:〔1〕__a+b≤c+d_____。
〔2〕以__b或d__为机架,则__a__为曲柄。
图1-16.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。
7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。
8. 当机构有极位夹角θ时,则机构有急回特性。
9.机构中传动角γ和压力角α之和等于90°。
10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题:1.在曲柄摇杆机构中,只有当为主动件时,才会出现“死点”位置。
D.曲柄2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构。
C. 有时有曲柄,有时没曲柄D. 以上答案均不对3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。
A. K<1B. K=1C. K>1D. K=04.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。
A.θ<0B.θ=0C. θ≦0D. θ﹥05.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。
C.不确定的D. 以上答案均不对6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。
机械原理大作业(一)作业名称:连杆机构运动分析设计题目:(34)题院系:船舶学院班级: 1213101设计者:学号:哈尔滨工业大学机械设计一、运动分析题目如图所示机构,已知机构各构件的尺寸为BF=200mm,EF=1.25BF,DE=1.13BF,EH=0.85BF,HF=0.65BF,CH=0.81BF,GC=1.56BF,BD=0.58BF,BG=1.85BF,GD=1.6BF,构件1的角速度为W1=10rad/s,试求构件2上点H的轨迹及构件5的角位移,角速度,角加速度,并对计算结果进行分析。
机构结构分析:二、机构的结构分析及基本杆组划分机构各构件都在同一平面内运动,活动构件数n=5,=7,=0则机构的自由度为:F=3×n-2×-1×=3×5-2×7-0=12.基本杆组划分(1)去除虚约束和局部自由度本机构中无虚约束或局部自由度。
(2)拆杆组。
从远离原动件(即杆1)进行拆分,就可以得到由杆4,5 组成的RRRⅡ级杆组GCH,2,3 组成的RRRⅡ级杆组EDF,最后剩下Ⅰ级机构杆1。
(3)确定机构的级别 由(2)知,机构为Ⅱ级机构三、各基本杆组的运动分析数学模型1)Ⅰ级杆组BF (原动件)在Ⅰ级杆组BF 中,即已知构件上B 点的运动参数,求同一构件上F 点(回转副)的运动参数。
调用Ⅰ级机构子程序即可求解 ①位置分析 由图可得F 点的矢量方程F B BF r r l =+x,y 轴上的投影坐标方程为cos sin F B BF BF F B BF BF x x l y y l ϕϕ=+⋅⎫⎬=+⋅⎭(1)②速度和加速度分析 将式(1)对时间t 求导即可得出速度方程:cos sin BF BF BF BF FF B BF FF B BF dx x x l dtdy y x l dt ϕϕϕϕ⋅⋅⋅⋅⋅⋅⎫⎪==-⎪⎬⎪==+⎪⎭ (2)2222cos sin sin cos BF BF BF BF BF BF BF FF B BF BF BF F F B BFBF d x x x l l dtd y y y l l dt ϕϕϕϕϕϕϕϕ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⎫⎪==--⎪⎬⎪==--⎪⎭(3)其中因为设B 为原点:B x =0;B y =0 ;B x ⋅=0 ;B y ⋅=0 ;B x ⋅⋅=0 ;B y ⋅⋅=0由上(1)(2)(3)方程可求出F 点的位移,速度,加速度2)RRR Ⅱ级杆组DEF 分析,求出F 点的角位移,角速度,角加速度上面1)中已求得F 点的位移,速度,加速度。
.6-1-1.平面连杆机构-习题+答案很全很好哦第一篇:.6-1-1.平面连杆机构-习题+答案很全很好哦平面连杆机构—周练一、判断题(每空3分,共计60分)1.平面连杆机构的基本形式,是铰链四杆机构。
()2.平面四杆机构都有曲柄。
()3.曲柄和连杆都是连架杆。
()4.在平面连杆机构中,只要以最短杆作固定机架,就能得到双曲柄机构。
()5.铰链四杆机构的曲柄存在条件是:连架杆或机架中必有一个是最短杆;量短杆与最长杆的长度之和小于或等于其余两杆的长度之和。
()6.利用选择不同构件作固定机架的方法,可以把曲柄摇杆机构改变成双摇杆机构。
()7.压力角就是主动件所受驱动力的方向线与该点速度的方向线之间的夹角。
()8.压力角越大,则机构传力性能越差。
()9.当机构的极位夹角θ=0时,机构无急回特性。
()10.在有曲柄的平面连杆机构中,曲柄的极位夹角θ,可以等于0,也可以大于0。
()11.机构是否存在死点位置与机构取那个构件为原动件无关。
()12.曲柄的极位夹角θ越大,机构的急回特性系数K也越大,机构的急回特性也越显著。
(A)13.曲柄滑块机构,滑块在作往复运动时,不会出现急回运动。
()14.对于曲柄摇杆机构,当取摇杆为主动件时,机构有死点位置。
()15.机构的极位夹角是衡量机构急回特性的重要指标。
极位夹角越大,则机构的急回特性越明显。
()16.在曲柄摇杆机构中,曲柄和连杆共线,就是“死点”位置。
()0017.在曲柄和连杆同时存在的平面连杆机构中,只要曲柄和连杆共线,这个位置就是曲柄的“死点”位置。
()18.“死点”位置在传动机构和锁紧机构中所起的作用相同,但带给机构的后果是不同的。
()19.传动机构出现“死点”位置和急回运动,对机构的工作都是不利的。
()20.铰链四杆机构由于积累误差较大,所以不能得到精确的预定规律。
()二、选择题(每空3分,共计51分)1.铰链四杆机构中,作整周回转运动的杆件是()A、摇杆B、曲柄C、连杆2.铰链四杆机构中的运动副属于()A、高副B、低副C、螺旋副3.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做()A、曲柄摇杆机构 B、双曲柄机构` C、双摇杆机构4.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆的长度之和,最短杆为机架,这个机构叫做()A、曲柄摇杆机构B、双曲柄机构` C、双摇杆机构5.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其他两杆的长度之和,最短杆是连架杆,这个机构叫做()A、曲柄摇杆机构 B、双曲柄机构` C、双摇杆机构6.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆长度之和,最短杆是连杆,这个机构叫做()A、曲柄摇杆机构 B、双曲柄机构` C、双摇杆机构7.能把转动运动转变成往复摆动运动的机构是()A、曲柄摇杆机构B、双曲柄机构`C、双摇杆机构D、曲柄滑块机构8.能把转动运动转换成往复直线运动,也可以把往复直线运动转换成转动运动的机构是()A、曲柄摇杆机构B、双曲柄机构C、双摇杆机构D、曲柄滑块机构9.能把等速转动运动转变成旋转方向相同的变速转动运动的机构是()A、曲柄摇杆机构B、不等长双曲柄机构`C、双摇杆机构D、曲柄滑块机构 10.曲柚摇杆机构的传动角是()a.连杆与从动摇杆之间所夹的余角; B、连杆与从动摇杆之间所夹的锐角; C、机构极位夹角的余角。
大作业(一)平面连杆机构的运动分析(题号:4-B)班级:机制096学号:***********名:***同组其他人员:________________________完成日期:________________________平面连杆机构的运动分析题目试用计算机完成下列平面连杆机构的运动分析。
1.图a 所示的为一平面六杆机构。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。
a )表1 平面六杆机构的尺寸参数(单位:mm )mm l 0.652=',mm x G 5.153=,mm y G 7.41=二、平面连杆机构的运动分析方程 1)位置分析 建立封闭矢量多边形 l 1+l 2=l 4+l 3;l 1+l 2 +l2’=AG +l 5 +l 6; (式1)将机构的封闭矢量方程式(1)写成在两坐标上的投影式,并改写成方程左边仅含未知量项的形式,即得(式2)由于牛顿迭代法不便于限制l5,l6的位置。
故在计算式采用复数矢量法直接求的。
求,;(1)(2)消去θ2得经整理后并可简化为式中:解之可得实际运动中0<θ3<180,故‘ +-’适当选择;求θ5,θ6 :先有则2)角速度分析E点速度;3)角加速度分析;E点加速度采用高斯消去法求角速度,角加速度;三、程序流程图源程序;#include<stdio.h>#include<stdlib.h>#include<math.h>#define PI 3.1415926#define N 4void Solutionangle(double [18],double ); /*矢量法求角位移*/ void Solutionspeed(double [N][N],double [N],double [18],double ); /*角速度求解*/void Solutionacceleration(double [N][N],double [N][N],double [N],double [18]);/*角加速度求解*/void GaussianE(double [N][N],double [N],double [N]);/*高斯消去*/void FoundmatrixA(double [18],double [N][N]); //创建系数矩阵Avoid FoundmatrixB(double [18],double ,double [N]);//创建系数矩阵Bvoid FoundmatrixDA(double [18],double [N][N]);//创建矩阵DAvoid FoundmatrixDB(double [18],double ,double [N]);//创建矩阵DB//定义全局变量double l1=26.5,l2=105.6,l3=67.5,l4=99.4,l5=37.4,l6=28.0;double l2g=65.0,xg=153.5,yg=41.7,inang=60*PI/180,as1=1.0;//主函数void main(){int i,j;FILE *fp;double shuju[36][18];double psvalue[18],a[N][N],da[N][N],b[N],db[N],ang1;//建立文件,并制表头if((fp=fopen("filel","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n The Kinematic Parameters of Point 5\n");fprintf(fp," ang2 ang3 ang5 ang6");fprintf(fp," as2 as3 as5 as6");fprintf(fp," aas2 aas3 aas5 aas6");fprintf(fp," xe ye vex vey aex aey\n");//计算数据并写入文件for(i=0;i<36;i++){ang1=i*PI/18;Solutionangle(psvalue,ang1);FoundmatrixB(psvalue,ang1,b);FoundmatrixA(psvalue,a);Solutionspeed(a,b,psvalue,ang1);FoundmatrixDA(psvalue,da);FoundmatrixDB(psvalue,ang1,db);Solutionacceleration(a,da,db,psvalue);for(j=0;j<4;j++){shuju[i][j]=psvalue[j]*180/PI;}for(j=4;j<18;j++){shuju[i][j]=psvalue[j];}fprintf(fp,"\n");for(j=0;j<18;j++)fprintf(fp,"%12.3f",shuju[i][j]);}fclose(fp);//输出数据for(i=0;i<36;i++){ang1=i*PI/18;printf("\n输出ang1=%d时的求解\n",i*10);printf("angle angspeed angacceleration :\n");for(j=0;j<4;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=4;j<8;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=8;j<12;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=12;j<18;j++)printf("%lf\t",shuju[i][j]);printf("\n");}}/*矢量法求角位移*/void Solutionangle(double value[18],double ang1){double xe,ye,A,B,C,phi,alpha,csn,ang5g,d2,d,ang2,ang3,ang5,ang6;A=2*l1*l3*sin(ang1);B=2*l3*(l1*cos(ang1)-l4);C=l2*l2-l1*l1-l3*l3-l4*l4+2*l1*l4*cos(ang1);ang3=2*atan((A+sqrt(A*A+B*B-C*C))/(B-C));if(ang3<0)//限定ang3大小{ang3=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));}ang2=asin((l3*sin(ang3)-l1*sin(ang1))/l2);xe=l4+l3*cos(ang3)+l2g*cos(ang2-inang);ye=l3*sin(ang3)+l2g*sin(ang2-inang);phi=atan2((yg-ye),(xg-xe));d2=(yg-ye)*(yg-ye)+(xg-xe)*(xg-xe);d=sqrt(d2);csn=(l5*l5+d2-l6*l6)/(2.0*l5*d);alpha=atan2(sqrt(1.0-csn*csn),csn);ang5g=phi-alpha;ang5=ang5g-PI;ang6=atan2(ye+l5*sin(ang5g)-yg,xe+l5*cos(ang5g)-xg);value[0]=ang2;value[1]=ang3;value[2]=ang5;value[3]=ang6;value[12]=xe;value[13]=ye;//限定角度大小for(int i=0;i<4;i++){while(value[i]>2*PI)value[i]-=2*PI;while(value[i]<0)value[i]+=2*PI;}}/*角速度求解*/void Solutionspeed(double a2[N][N],double b2[N],double value[18],double ang1){double ang2,ang3;ang2=value[0];ang3=value[1];double p2[N];GaussianE(a2,b2,p2);value[4]=p2[0];value[5]=p2[1];value[6]=p2[2];value[7]=p2[3];value[14]=-l3*value[5]*sin(ang3)-l2g*value[4]*sin(ang2-inang);value[15]=l3*value[5]*cos(ang3)+l2g*value[4]*cos(ang2-inang);}/*角加速度求解*/void Solutionacceleration(double a3[N][N],double da3[N][N],doubledb3[N],double value[18]){int i,j;double ang2,ang3;ang2=value[0];ang3=value[1];double bk[N]={0};double p3[N];for(i=0;i<N;i++){for(j=0;j<N;j++){bk[i]+=-da3[i][j]*value[4+j];}bk[i]+=db3[i]*as1;}GaussianE(a3,bk,p3);value[8]=p3[0];value[9]=p3[1];value[10]=p3[2];value[11]=p3[3];value[16]=-l3*value[9]*sin(ang3)-l3*value[5]*value[5]*cos(ang3)-l2g* value[8]*sin(ang2-inang)-l2g*value[4]*value[4]*cos(ang2-inang);value[17]=l3*value[9]*cos(ang3)-l3*value[5]*value[5]*sin(ang3)+l2g* value[8]*cos(ang2-inang)-l2g*value[4]*value[4]*sin(ang2-inang);}/*高斯消去法解矩阵方程*/void GaussianE(double a4[N][N],double b4[N],double p4[N]){int i,j,k;double a4g[N][N],b4g[N],t;for(i=0;i<N;i++)for(j=0;j<N;j++)a4g[i][j]=a4[i][j];for(i=0;i<N;i++)b4g[i]=b4[i];//施主对角线上的值竟可能大if(a4g[0][0]<a4g[1][0] && a4g[0][1]>a4g[1][1]){for(j=0;j<N;j++){t=a4g[0][j];a4g[0][j]=a4g[1][j];a4g[1][j]=t;}t=b4g[0];b4g[0]=b4g[1];b4g[1]=t;}if(a4g[2][2]<a4g[3][2] && a4g[2][3]>a4g[3][3]){for(j=0;j<N;j++){t=a4g[2][j];a4g[2][j]=a4g[3][j];a4g[3][j]=t;}t=b4g[2];b4g[2]=b4g[1];b4g[3]=t;}//初等行变换for(j=0;j<N;j++)for(i=0;i<N;i++){if(i!=j){for(k=0;k<N;k++)if(k!=j){a4g[i][k]-=a4g[i][j]/a4g[j][j]*a4g[j][k];}b4g[i]-=b4g[j]*a4g[i][j]/a4g[j][j];a4g[i][j]=0;}}for(i=0;i<N;i++)b4g[i]/=a4g[i][i];p4[0]=b4g[0];p4[1]=b4g[1];p4[2]=b4g[2];p4[3]=b4g[3];}//创建系数矩阵Avoid FoundmatrixA(double value5[18],double a5[N][N]){double ang2,ang3,ang5,ang6;ang2=value5[0];ang3=value5[1];ang5=value5[2];ang6=value5[3];a5[0][0]=-l2*sin(ang2);a5[0][1]=l3*sin(ang3);a5[1][0]=l2*cos(ang2);a5[1][1]=-l3*cos(ang3);a5[2][0]=-l2*sin(ang2)-l2g*sin(ang2-inang);a5[2][2]=l5*sin(ang5);a5[2][3]=l6*sin(ang6);a5[3][0]=l2*cos(ang2)+l2g*cos(ang2-inang);a5[3][2]=-l5*cos(ang5);a5[3][3]=-l6*cos(ang6);a5[0][2]=a5[0][3]=a5[1][2]=a5[1][3]=a5[2][1]=a5[3][1]=0;}//创建系数矩阵Bvoid FoundmatrixB(double value6[18],double ang1,double b6[N]){b6[0]=b6[2]=l1*sin(ang1)*as1;b6[1]=b6[3]=-l1*cos(ang1)*as1;}//创建矩阵DAvoid FoundmatrixDA(double value7[18],double da7[N][N]){double ang2,ang3,ang5,ang6,as2,as3,as5,as6;ang2=value7[0];ang3=value7[1];ang5=value7[2];ang6=value7[3];as2=value7[4];as3=value7[5];as5=value7[6];as6=value7[7];da7[0][0]=-l2*as2*cos(ang2);da7[0][1]=l3*as3*cos(ang3);da7[1][0]=-l2*as2*sin(ang2);da7[1][1]=l3*as3*sin(ang3);da7[2][0]=as2*(-l2*cos(ang2)-l2g*cos(ang2-inang));da7[2][2]=as5*l5*cos(ang5);da7[2][3]=as6*l6*cos(ang6);da7[3][0]=as2*(-l2*sin(ang2)-l2g*sin(ang2-inang));da7[3][2]=as5*l5*sin(ang5);da7[3][3]=as6*l6*sin(ang6);da7[0][2]=da7[0][3]=da7[1][2]=da7[1][3]=da7[2][1]=da7[3][1]=0; }//创建矩阵DBvoid FoundmatrixDB(double value8[18],double ang1,double db8[N]){db8[0]=db8[2]=l1*as1*cos(ang1);db8[1]=db8[3]=l1*as1*sin(ang1);}得出数据;jiao ang2 ang3 ang5 ang6 as2 as3 as5 as6 aas2 aas3 aas5 aas6 vex vey0 39.329 82.523 325.598 123.267 -0.364 -0.364 -2.106 -2.584 0.065 0.605 4.42 4.582 15.987 -25.3 -48.191 3.45810 35.791 79.453 308.065 101.37 -0.34 -0.247 -3.233 -3.736 0.192 0.71 -1.774 -6.069 7.346 -23.234 -49.638 19.20220 32.581 77.609 295.879 86.4 -0.3 -0.121 -2.877 -3.429 0.266 0.725 0.725 -3.084 -0.997 -19.033 -45.237 27.60230 29.828 77.021 286.688 76.547 -0.25 0.002 -2.704 -3.254 0.291 0.669 2.1 -1.259 -8.281 -14.038 -37.988 28.54640 27.579 77.594 278.84 70.118 -0.2 0.11 -2.713 -3.267 0.283 0.572 3.101 0.033 -14.228 -9.365 -30.199 24.40150 25.822 79.164 271.136 65.475 -0.152 0.2 -2.898 -3.514 0.258 0.462 4.358 1.42 -18.855 -5.654 -22.943 17.94460 24.514 81.54 262.355 60.628 -0.11 0.272 -3.264 -4.045 0.23 0.356 6.796 3.96 -22.282 -3.115 -16.445 11.22570 23.609 84.538 250.648 52.508 -0.072 0.325 -3.717 -4.794 0.203 0.26 12.436 10.302 -24.633 -1.682 -10.596 5.41180 23.059 87.993 233.633 36.895 -0.039 0.363 -3.706 -5.092 0.182 0.177 21.373 22.181 -26.009 -1.142 -5.241 1.02890 22.827 91.758 212.277 13.352 -0.008 0.388 -2.652 -4.097 0.166 0.105 19.269 23.261 -26.486 -1.23 -0.291 -1.772100 22.886 95.709 192.907 348.876 0.02 0.401 -1.39 -2.688 0.155 0.043 8.187 11.83 -26.134 -1.671 4.258 -3.03110 23.215 99.735 179.35 328.766 0.046 0.403 -0.633 -1.742 0.148 -0.013 2.177 4.612 -25.026 -2.207 8.349 -2.894120 23.803 103.74 171.086 313.49 0.071 0.396 -0.618 -1.321 0.144 -0.063 2.053 2.131 -23.252 -2.612 11.883 -1.569130 24.641 107.636 166.438 301.951 0.096 0.381 -0.335 -1.004 0.141 -0.108 1.238 1.535 -20.917 -2.7 14.749 0.688140 25.726 111.343 163.988 293.121 0.121 0.359 -0.172 -0.774 0.139 -0.149 0.668 1.136 -18.148 -2.335 16.845 3.578150 27.053 114.792 162.729 286.295 0.145 0.33 -0.092 -0.599 0.136 -0.185 0.272 0.88 -15.086 -1.434 18.104 6.765160 28.619 117.918 161.961 281.015 0.168 0.295 -0.07 -0.462 0.131 -0.216 -0.009 0.705 -11.878 0.023 18.515 9.895170 30.413 120.667 161.189 276.972 0.19 0.255 -0.09 -0.351 0.122 -0.242 -0.208 0.567 -8.668 1.997 18.144 12.626180 32.419 122.995 160.062 273.919 0.21 0.21 -0.139 -0.263 0.108 -0.262 -0.345 0.436 -5.582 4.39 17.137 14.66190 34.613 124.867 158.341 271.626 0.228 0.164 -0.208 -0.199 0.088 -0.276 -0.432 0.296 -2.711 7.061 15.715 15.783200 36.96 126.259 155.87 269.847 0.241 0.115 -0.288 -0.161 0.063 -0.285 -0.481 0.141 -0.105 9.839 14.15 15.88210 39.415 127.153 152.563 268.314 0.249 0.064 -0.374 -0.15 0.031 -0.291 -0.503 -0.021 2.237 12.543 12.732 14.933220 41.924 127.541 148.38 266.744 0.251 0.013 -0.462 -0.168 -0.006 -0.294 -0.506 -0.18 4.364 14.994 11.731 12.997230 44.421 127.416 143.317 264.862 0.247 -0.038 -0.55 -0.212 -0.049 -0.298 -0.496 -0.319 6.369 17.027 11.37 10.16240 46.833 126.77 137.39 262.43 0.234 -0.091 -0.635 -0.277 -0.096 -0.303 -0.474 -0.417 8.379 18.493 11.797 6.506250 49.076 125.596 130.639 259.278 0.213 -0.144 -0.715 -0.354 -0.149 -0.309 -0.441 -0.456 10.536 19.253 13.061 2.079260 51.059 123.882 123.118 255.341 0.182 -0.199 -0.788 -0.432 -0.206 -0.318 -0.403 -0.428 12.982 19.173 15.078 -3.129270 52.683 121.614 114.892 250.666 0.141 -0.255 -0.856 -0.5 -0.266-0.326 -0.376 -0.342 15.828 18.113 17.578 -9.172280 53.843 118.776 106.005 245.397 0.089 -0.313 -0.922 -0.55 -0.328 -0.332 -0.383 -0.237 19.116 15.92 20.031 -16.099290 54.431 115.361 96.438 239.706 0.027 -0.37 -0.994 -0.586 -0.386 -0.329 -0.46 -0.188 22.767 12.446 21.555 -23.818300 54.348 111.373 86.051 233.663 -0.045 -0.426 -1.089 -0.626 -0.433 -0.307 -0.658 -0.316 26.513 7.586 20.875 -31.863310 53.512 106.854 74.482 227.008 -0.123 -0.476 -1.237 -0.72 -0.457 -0.253 -1.097 -0.862 29.836 1.371 16.468 -15.719320 51.885 101.9 60.917 218.711 -0.202 -0.512 -1.505 -0.983 -0.442 -0.153 -2.11 -2.388 31.97 -5.876 7.096 -15.719330 49.493 96.686 43.514 205.974 -0.274 -0.526 -2.034 -1.659 -0.376 0.002 -4.052 -5.6 32.023 -13.395 -7.196 -15.719340 46.454 91.482 19.363 183.783 -0.33 -0.509 -2.78 -2.796 -0.255 0.204 -3.32 -5.95 29.302 -19.97 -24.083 -15.719350 42.975 86.637 350.437 152.646 -0.361 -0.454 -2.818 -3.205 -0.096 0.422 2.827 1.495 -15.719 -15.719 -15.719 -15.719。
汽车曲柄连杆机构试题一.填空题1.曲柄连杆机构由————、————和————等三部分组成。
2.发动机各个部分机构和系统的装配基体是————。
3.活塞连杆组由`————、————、————和————等组成。
4.活塞包括————和————两种。
5.在安装气环时,各个气环的切口应该————。
6.油环分为————和组油环两种,组油环一般由————和————组成。
7.在安装扭曲环时,还应注意将其内圈切槽向————,外圈切槽向————,不能反装。
8.活塞销通常做成————圆柱体.9.活塞销与活塞销座孔及连杆小头衬套孔的配合,一般都采用————。
10.连杆由————、————和————三部分组成。
连杆————与活塞销相连。
11.曲轴飞轮组主要由————和————以及其他不同作用的的零件和附件组成。
12.曲轴的曲拐数取决于发动机的————和————。
13.曲轴按支承型式的不同分为————和————;按节构型式的不同分为————和————曲轴;按加工方法的不同分为————和————。
14.曲轴前端装有驱动配气凸轮轴的————,驱动风扇和水泵的————制止推片等,有些中小型发动机的曲轴前端还装有————,以便必要时用人力转动曲轴.15.飞轮边缘一侧有指示气缸活塞位于上止点的标志,用以作为调整和检查————正时和————正时的依据.16.V8发动机的气缸数为————缸。
17.V8发动机全支承式曲轴的曲轴径数为————。
二.选择题(有一项或多项正确)1.曲柄连杆机构工作条件的特点时()A.高温B.高压C.高速D.化学腐蚀2.曲柄连杆机构在运动过程中受()作用A.气体作用力B.摩擦力C.运动质量惯性力D.外界阻力3.在做功行程时,面对发动机,气缸的()磨损严重.A.左侧B.右侧C.前部D.后部4.在压缩行程时,面对发动机,气缸的( )磨损严重。
A.左侧 B.右侧 C.前部 D.后部5.在将气缸盖用螺栓固定在气缸体上,拧紧螺栓时,应采取下列方法( )。
平面连杆机构1一、单项选择题1、具有急回特性的四杆机构,其行程速度变化系数K的值(C )。
A. 1≤B. 1<C. 1>D. 1=2、在曲柄摇杆机构中,当摇杆为从动件时,最小传动角出现在(B)共线的位置。
A. 曲柄与连杆B. 曲柄与机架C. 摇杆与机架D. 摇杆与连杆3、铰链四杆机构有整转副的条件是:最短杆与最长杆长度之和(C)其余两杆长度之和。
A. <B. =C. ≤D. ≥4、四杆机构的急回特性是针对主动件作(A)而言的。
A. 等速转动B. 等速移动C. 变速转动D. 变速移动5、对心曲柄滑块机构以滑块为从动件时,其最小传动角 min出现在曲柄(A)的位置。
A. 垂直于滑块导路B. 垂直于连杆C. 与连杆共线D. 与机架共线6、如果铰链四杆机构中的最短杆与最长杆长度之和(A)其余两杆长度之和,则该机构中不存在整转副。
A. >B. ≥C. <D. ≤7、四杆机构的急回特性是针对从动件作(D)而言的。
A. 等速转动B. 等速移动C. 变速转动D.往复运动8、对心曲柄滑块机构以滑块为从动件时,其最大传动角g max为(C)。
A. ︒<9090 D. ︒45 C. ︒30 B. ︒9、对于双摇杆机构,最短构件与最长构件长度之和(B)大于其它两构件长度之和。
A. 一定B. 不一定C. 一定不D. 在最短构件为机架10、对于曲柄滑块机构,当曲柄作等速转动时,从动件滑块(B)具有急回特性。
A. 一定B. 不一定C. 一定不D. 在极限位置11、当连杆机构位置一定时,取不同构件为原动件,机构压力角的数值(B)。
A. 相同B. 不同C. 与原动件转向有关D. 与原动件转速大小有关12、铰链四杆机构中若最短杆与最长杆长度之和大于其他两杆长度之和,则机构中(C)。
A. 一定有曲柄存在B. 是否有曲柄存在取决于机架是否为最短构件C. 一定无曲柄存在D. 是否有曲柄存在取决于机架是否为最长构件二、填空题1、平面连杆机构是若干构件用低副连接组成的平面机构。
曲柄连杆机构一、填空题1·曲柄连杆机构由_______、________和_______等三部分构成。
2·发动机各个机构和系统的装配基体是________。
3·活塞连杆组由_______、______ 、________、和________等组成。
4·活塞环包括______和_______两种。
5·在安装气环时,各个气环的切口应该________。
6·油环分为______和组合油环两种,组合油环一般由________和________ 组成。
7·在安装扭曲环时,还应注意将其内圈切槽向________,外圈切槽向_______ ,不能装反。
8·活塞销通常做成_______圆柱体。
9·活塞销与活塞销座孔及连杆小头衬套孔的配合,一般都采用________。
10·连杆由______、_______和_______三部分组成。
连杆_______与活塞销相连。
11·曲轴飞轮组主要由_______和_______以及其他不同作用的零件和附件组成。
12·曲轴的曲拐数取决于发动机的________和________。
13·曲轴按支承型式的不同分为_______和______;按结构型式的不同分为_______和_______曲轴;按加工方法的不同分为________和_______。
14·曲轴前端装有驱动配气凸轮轴的_______,驱动风扇和水泵的_________止推片等,有些中小型发动机的曲轴前端还装有______,以便必要时用人力转动曲轴。
15·飞轮边缘一侧有指示气缸活塞位于上止点的标志,用以作为调整和检查_______正时和________正时的依据。
16·V8发动机的气缸数为 ________缸。
17·V8发动机全支承式曲轴的主轴颈数为________。
曲柄连杆机构一、填空题1.活塞与气缸壁之间应保持一定的配合间隙,间隙过大将会产生 ________ 、______ 和 _______ ; 间隙过小又会产生__________ 、 _______ 。
2.活塞受_______ 、_______ 和 _______ 三个力,为了保证其正常工作,活塞的形状是比较特殊的,轴线方向呈 __________________ 形;径向方向呈 ______ 形。
3.四缸四冲程发动机的作功顺序一般是 ______________ 或________ ;六缸四冲程发动机作功顺序一般是 ________ 或__________ 。
4.曲柄连杆机构的主要零件可分为________________ 、 ___________ 和 _____________ 三个组。
5.机体组包括 ________ 、_______ 、 _______ 、 _______ 等;活塞连杆组包括 ______ 、________ 、 ______ _______ 等;曲轴飞轮组包括 ____________ 、_______ 等。
6.活塞销与销座及连杆小头的配合有 ______________ 及 _________ 二种形式。
7.油环的结构形式有 ________ 和 _______ 二种。
8.气环的截面形状主要有____________ 、 _______ 、 __________ 、_________ 、______ 几种。
9.气缸套有 _____ 和_____ 两种。
10.曲柄连杆机构的作用是将燃料燃烧后作用在活塞顶上的___________ 转变为推动曲轴旋转的 ________ 。
11.多缸发动机,通常按气缸布置形式的不同分为 ________________ 、 ________ 、和 ________ 三种形式。
12.活塞的基本结构可分为______________ 、__________ 、和 _________ 三部分。
机械原理作业设计说明书课程名称:机械原理设计题目:连杆机构运动分析院系:班级:设计者:学号:设计时间:连杆机构运动分析题目:如图1-1所示机构,已知机构各构件的尺寸为AB=100mm ,BC=2.73AB ,CD=1.36AB ,CG=2.32AB ,BG=4.9AB ,AF=2.36AB ,AD=2.87AB ,DF=2AB ,GE=1.45AB ,EF=2.82AB ,GM=1.36AB ,MK=1.91AB ,KD=0.54AB ,KF=2.18AB ,HF=3.1AB ,DH=3.63AB ,o 135=β,构件1的角速度为s /rad 101=ω。
试求构件2上G 点的轨迹及构件4、构件6和构件8的角位移、角速度和角加速度,并对计算结果进行分析。
HGMECFKDBAXY图1 解:1、建立坐标系建立以点H 为原点的固定平面直角坐标系D-x ,y ,如图1所示。
1.对机构进行结构分析该机构由I级杆组RR(原动件AB)、II级杆组RRR(杆2、9)、II级杆组RRR(杆5、6)、II级杆组RRR(杆7、8)和II级杆组RPR (杆4、滑块3)组成。
I级杆组RR(原动件AB)如图2所示,II 级杆组RRR(杆2、9)如图3所示,II级杆组RRR(杆5、6)如图5所示,II级杆组RRR(杆7、8)如图6所示,II级杆组RPR(杆4、滑块3)如图7所示。
图2 I级杆组RR 图3 II级杆组RRR图5 II级杆组RRR 图6 II级杆组RRR图7 II 级杆组RPR2.各基本杆组运动分析1. I 级杆组RR (原动件AB )如图2所示,已知原动件杆1的转角 ︒︒=360-0ϕ pi =δ角速度 s rad /101==ωϕ角加速度 0==εϕ运动副A 的位置坐标为 mm y mm x A A 5.41,3.542==速度为 0,0==A A y x加速度为 0,0==A A y x原动件杆1的长度 mm l AB 100=所以,运动副B 的位置、速度和加速度分子如下: 1 位置分析)cos(δϕ++=i AB A B l x x )sin(δϕ++=i AB A B l y y2 速度分析)sin(δϕ+⨯⨯-=i AB xA xB l w v v )sin(δϕ+⨯⨯+=i AB yA yB l w v v 3 加速度分析)sin()cos(2δϕδϕ+-+-=i AB i AB xA xB el l w a a )()sin(2δϕδϕ+++-=i AB i AB yA yB coa el l w a a 求出运动副B 的yB xB yB xB B B a a v v y x ,,,,,各个运动参数。
1.运动分析题目如图所示机构,已知机构各构件的尺寸为AB=108mm,EF=320mm,BC=CE=CD=200mm,FG=162mm,AD=258mm,AG=514mm,DG=384mm,β=80º,构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2.机构的结构分析,组成机构的基本杆组划分3.各基本杆组的运动分析数学模型(1)RR基本杆组:delt=0xB = xA + AB * Cos(f + delt)yB = yA + AB* Sin(f + delt)vxB = vxA - w * AB * Sin(f + delt)vyB = vyA + w * AB* Cos(f + delt)axB = axA - w ^ 2 * AB * Cos(f + delt):ayB = ayA - w ^ 2 * AB* Sin(f + delt)(2)RRR基本杆组Ci = lbc * Cos(fbc)Si = lbc * Sin(fbc)Cj = lcd * Cos(fcd)Sj = lcd * Sin(fcd)G1 = Ci * Sj - Cj * Siwbc = (Cj * (vxD - vxB) + Sj * (vyD - vyB)) / G1wcd = (Ci * (vxD - vxB) + Si * (vyD - vyB)) / G1vxC = vxB - wbc * lbc * Sin(fbc)vyC = vyB + wbc * lbc * Cos(fbc)G2 = axD - axB + wbc ^ 2 * Ci - wcd ^ 2 * CjG3 = ayD - ayB + wbc ^ 2 * Si - wcd ^ 2 * Sjebc = (G2 * Cj + G3 * Sj) / G1ecd = (G2 * Ci + G3 * Si) / G1axC = axB - ebc * lbc * Sin(fbc) - wbc ^ 2 * lbc * Cos(fbc)ayC = ayB + ebc * lbc * Cos(fbc) - wbc ^ 2 * lbc * Sin(fbc)EB = 2 * BC * Cos(febc)xE = xB + EB* Cos(fbc + febc)yE = yB + EB * Sin(fbc + febc)vxE = vxB – wbc * EB* Sin(fbc + febc)vyE = vyB + wbc * EB* Cos(fbc + febc)axE = axB - wbc ^ 2 * EB * Cos(fbc + delt) - ebc * EB * Sin(fbc + febc)ayE = ayB - wbc ^ 2 * leb * Sin(fbc + delt) + ebc * leb * Sin(fbc + febc) Ci = lef * Cos(fef)Si = lef * Sin(fef)Cj = lfg * Cos(ffg)Sj = lfg * Sin(ffg)G1 = Ci * Sj - Cj * Siwef = (Cj * (vxG - vxE) + Sj * (vyG - vyE)) / G1wfg = (Ci * (vxG - vxE) + Si * (vyG - vyE)) / G1vxF = vxE - wef * lef * Sin(fef)vyF = vyE + wef * lef * Cos(fef)G2 = axG - axE + wef ^ 2 * Ci - wfg ^ 2 * CjG3 = ayG - ayE + wef ^ 2 * Si - wfg ^ 2 * Sjeef = (G2 * Cj + G3 * Sj) / G1efg = (G2 * Ci + G3 * Si) / G1axF = axE - eef * lef * Sin(fef) - wef ^ 2 * lef * Cos(fef)ayF = ayE + eef * lef * Cos(fef) - wef ^ 2 * lef * Sin(fef)4.计算编程Dim xA As DoubleDim yA As DoubleDim vxA As DoubleDim vyA As DoubleDim axA As Double 'A '点加速度x轴分量Dim ayA As Double 'A '点加速度y轴分量Dim xB As Double 'B'点'x轴坐标Dim yB As Double 'B点y轴坐标Dim vxB As Double 'B点速度x轴分量Dim vyB As Double 'B点速度y轴分量Dim axB As Double 'B点加速度x轴分量Dim ayB As Double 'B点加速度y轴分量Dim xC As Double 'C点x轴坐标Dim yC As Double C'点y轴坐标Dim vxC As Double 'C点速度x轴分量Dim vyC As Double 'C点速度y轴分量Dim axC As Double 'C点加速度x轴分量Dim ayC As Double 'C点加速度y轴分量Dim xD As Double 'D点x轴坐标Dim yD As Double 'D点y轴坐标Dim vxD As Double 'D点速度x轴分量Dim vyD As Double 'D点速度y轴分量Dim axD As Double 'D点加速度x轴分量Dim ayD As Double 'D点加速度y轴分量Dim xE As Double 'E点x轴坐标Dim yE As Double 'E点y轴坐标Dim vxE As Double 'E点速度x轴分量Dim vyE As Double 'E点速度y轴分量Dim axE As Double 'E点加速度x轴分量Dim ayE As Double 'E点加速度y轴分量Dim xF As Double 'F点x轴坐标Dim yF As Double 'F点y轴坐标Dim vxF As Double 'F点速度x轴分量Dim vyF As Double 'F点速度y轴分量Dim axF As Double 'F点加速度x轴分量Dim ayF As Double 'F点加速度y轴分量Dim xG As Double 'G点x轴坐标Dim yG As Double 'G点y轴坐标Dim vxG As Double 'G点速度x轴分量Dim vyG As Double 'G点速度y轴分量Dim axG As Double 'G点加速度x轴分量Dim ayG As Double 'G点加速度y轴分量Dim delt As Double ' AB杆初始转角Dim lab As Double 'AB杆长Dim lbc As Double 'BC杆长Dim lcd As Double ' CD杆长Dim lce As Double 'CE杆长Dim lef As Double 'EF杆长Dim lfg As Double 'FG杆长Dim leb As Double 'ED杆长Dim f As Double 'AB杆转角Dim fbc As Double 'BC杆转角Dim fcd As Double 'CD杆转角Dim fce As Double 'CE杆转角Dim fef As Double 'EF杆转角Dim ffg As Double 'FG杆转角Dim fge As Double 'ge杆转角Dim w As Double 'AB杆角速度Dim wbc As Double ' BC角速度Dim wcd As Double 'CD角速度Dim wce As Double 'CE角速度Dim wef As Double 'EF角速度Dim wfg As Double 'FG角速度Dim e As Double 'AB杆角加速度Dim ebc As Double ' BC杆角加速度Dim ecd As Double 'CD杆角加速度Dim ece As Double 'CE杆角加速度Dim eef As Double 'EF杆角加速度Dim efg As Double 'FG杆角加速度Dim LBD As Double 'BD距离Dim leg As Double 'EG距离Dim JCBD As Double '角CBDDim jfeg As Double '角FEGDim fBD As Double 'BD转角Dim feg As Double 'EG转角Dim Ci As DoubleDim Cj As DoubleDim Si As DoubleDim Sj As DoubleDim G1 As DoubleDim G2 As DoubleDim G3 As DoubleDim val As DoubleDim pi As DoubleDim pa As DoubleDim febc As Double '角EBCDim i As DoubleDim fj1 As DoublePrivate Sub Command1_Click() '求点E的轨迹Picture1.Scale (-300, 400)-(10, -15)Picture1.Line (-300, 0)-(10, 0) 'XPicture1.Line (0, 400)-(0, -15) 'YFor i = -300 To 0 Step 50 'X轴坐标Picture1.DrawStyle = 2Picture1.Line (i, 400)-(i, 0)Picture1.CurrentX = i - 10: Picture1.CurrentY = 0 Picture1.Print iNext iFor i = 0 To 350 Step 50 'Y轴坐标Picture1.DrawStyle = 2Picture1.Line (0, i)-(-400, i)Picture1.CurrentX = -20: Picture1.CurrentY = i + 7 Picture1.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Picture1.PSet (xE, yE)Next fj1End SubPrivate Sub Command2_Click() '求构件5的角位移Picture2.Scale (-20, 5)-(380, -0.5)Picture2.Line (-20, 0)-(380, 0) 'XPicture2.Line (0, 3)-(0, -0.5) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture2.DrawStyle = 2Picture2.Line (i, 3)-(i, 0)Picture2.CurrentX = i - 10: Picture2.CurrentY = 0 Picture2.Print iNext iFor i = -0.5 To 3 Step 0.5 'Y轴坐标Picture2.Line (0, i)-(380, i)Picture2.CurrentX = -25: Picture2.CurrentY = i Picture2.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture2.PSet (fj1, ffg)Next fj1End SubPrivate Sub Command3_Click() '求构件5的角速度Picture3.Scale (-20, 10)-(380, -10)Picture3.Line (-20, 0)-(380, 0) 'XPicture3.Line (0, 10)-(0, -10) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture3.DrawStyle = 2Picture3.Line (i, 10)-(i, -10)Picture3.CurrentX = i - 10: Picture3.CurrentY = 0 Picture3.Print iNext iFor i = -8 To 8 Step 2 'Y轴坐标Picture3.Line (0, i)-(380, i)Picture3.CurrentX = -20: Picture3.CurrentY = i Picture3.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture3.PSet (fj1, wfg)Next fj1End SubPrivate Sub Command4_Click() '求构件5的角加速度Picture4.Scale (-20, 300)-(380, -200)Picture4.Line (-20, 0)-(380, 0) 'XPicture4.Line (0, 300)-(0, -200) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture4.DrawStyle = 2Picture4.Line (i, 300)-(i, -200)Picture4.CurrentX = i - 10: Picture4.CurrentY = 0 Picture4.Print iNext iFor i = -200 To 300 Step 50 'Y轴坐标Picture4.Line (0, i)-(380, i)Picture4.CurrentX = -25: Picture4.CurrentY = i + 5 Picture4.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture4.PSet (fj1, efgNext fj1End SubPrivate Sub Form_Load() '赋初值lab = 108lce = 200lbc = 200lcd = 200lef = 320lfg = 162w = 10e = 0delt = 0xA = 0yA = 0vyA = 0axA = 0ayA = 0xD = -178.311284yD = 186.464704vxD = 0vyD = 0axD = 0ayD = 0xG = -514yG = 0vxG = 0vyG = 0axG = 0ayG = 0pi = 3.1415926pa = pi / 180febc = pa * 50End SubPrivate Sub RR1() 'RR基本杆组xB = xA + lab * Cos(f + delt)yB = yA + lab * Sin(f + delt)vxB = vxA - w * lab * Sin(f + delt)vyB = vyA + w * lab * Cos(f + delt)axB = axA - w ^ 2 * lab * Cos(f + delt) - e * lab * Sin(f + delt)ayB = ayA - w ^ 2 * lab * Sin(f + delt) + e * lab * Sin(f + delt)End SubPrivate Sub RR2() 'RR基本杆组leb = 2 * lbc * Cos(febc)xE = xB + leb * Cos(fbc + febc)yE = yB + leb * Sin(fbc + febc)vxE = vxB - wbc * leb * Sin(fbc + febc)vyE = vyB + wbc * leb * Cos(fbc + febc)axE = axB - wbc ^ 2 * leb * Cos(fbc + delt) - ebc * leb * Sin(fbc + febc) ayE = ayB - wbc ^ 2 * leb * Sin(fbc + delt) + ebc * leb * Sin(fbc + febc) End SubPrivate Sub RRR1() 'RRR基本杆组LBD = Sqr((xD - xB) ^ 2 + (yD - yB) ^ 2)If LBD > lbc + lcd And LBD < Abs(lbc - lcd) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndEnd IfElseEnd IfIf LBD < lbc + lcd And LBD > Abs(lbc - lcd) Then val = (lbc ^ 2 + LBD ^ 2 - lcd ^ 2) / (2 * lbc * LBD) JCBD = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1) ElseEnd IfIf LBD = lbc + lcd ThenJCBD = 0ElseEnd IfIf LBD = Abs(lbc - lcd) ThenIf lbc > lcd ThenJCBD = 0ElseEnd IfIf lbc < lcd ThenJCBD = piElseEnd IfElseEnd IfIf xD > xB And yD >= yB Then '第一象限fBD = Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD > yB ThenfBD = pi / 2ElseEnd IfIf xD < xB And yD >= yB Then '第二象限fBD = pi + Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD < xB And yD < yB Then '第三象限fBD = pi + Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD < yB ThenfBD = 3 * pi / 2ElseEnd IfIf xD > xB And yD <= yB Then '第四象限fBD = 2 * pi + Atn((yD - yB) / (xD - xB))ElseEnd Iffbc = fBD - JCBDxC = xB + lbc * Cos(fbc)yC = yB + lbc * Sin(fbc)If xC > xD And yC >= yD Then '第一象限fcd = Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC >= yD Thenfcd = pi / 2ElseEnd IfIf xC < xD And yC >= yD Then '第二象限fcd = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC < xD And yC < yD Then '第三象限fcd = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC < yD Thenfcd = 3 * pi / 2ElseEnd IfIf xC > xD And yC <= yD Then '第四象限fcd = 2 * pi + Atn((yC - yD) / (xC - xD))ElseEnd IfCi = lbc * Cos(fbc)Si = lbc * Sin(fbc)Cj = lcd * Cos(fcd)Sj = lcd * Sin(fcd)G1 = Ci * Sj - Cj * Siwbc = (Cj * (vxD - vxB) + Sj * (vyD - vyB)) / G1 wcd = (Ci * (vxD - vxB) + Si * (vyD - vyB)) / G1 vxC = vxB - wbc * lbc * Sin(fbc)vyC = vyB + wbc * lbc * Cos(fbc)G2 = axD - axB + wbc ^ 2 * Ci - wcd ^ 2 * CjG3 = ayD - ayB + wbc ^ 2 * Si - wcd ^ 2 * Sj ebc = (G2 * Cj + G3 * Sj) / G1ecd = (G2 * Ci + G3 * Si) / G1axC = axB - ebc * lbc * Sin(fbc) - wbc ^ 2 * lbc * Cos(fbc)ayC = ayB + ebc * lbc * Cos(fbc) - wbc ^ 2 * lbc * Sin(fbc)End SubPrivate Sub RRR2() 'RRR基本杆组leg = Sqr((xG - xE) ^ 2 + (yG - yE) ^ 2)If leg > lef + lfg And leg < Abs(lef - lfg) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndElseEnd IfElseEnd IfIf leg < lef + lfg And leg > Abs(lef - lfg) Thenval = (lef ^ 2 + leg ^ 2 - lfg ^ 2) / (2 * lef * leg)jfeg = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1)ElseEnd IfIf leg = lef + lfg Thenjfeg = 0ElseEnd IfIf leg = Abs(lef - lfg) ThenIf lef > lfg Thenjfeg = 0ElseEnd IfIf lef < lfg Thenjfeg = piElseEnd IfElseEnd IfIf xG > xE And yG >= yE Then '第一象限feg = Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG = xE And yG > yE Thenfeg = pi / 2ElseEnd IfIf xG < xE And yG >= yE Then '第二象限feg = pi + Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG < xE And yG < yE Then '第三象限feg = pi + Atn((yG - yE) / (xG - xE)) ElseEnd IfIf xG = xE And yG < yE Thenfeg = 3 * pi / 2ElseEnd IfIf xG > xE And yG <= yE Then '第四象限feg = 2 * pi + Atn((yG - yE) / (xG - xE)) ElseEnd Iffef = feg - jfegxF = xE + lef * Cos(fef)yF = yE + lef * Sin(fef)If xF > xG And yF >= yG Then '第一象限ffg = Atn((yF - yG) / (xF - xG))ElseEnd IfIf xF = xG And yF >= yG Thenffg = pi / 2ElseEnd IfIf xF < xG And yF >= yG Then '第二象限ffg = pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfIf xF < xG And yF < yG Then '第三象限ffg = pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfIf xF = xG And yF < yG Thenffg = 3 * pi / 2ElseEnd IfIf xF > xG And yF <= yG Then '第四象限ffg = 2 * pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfCi = lef * Cos(fef)Si = lef * Sin(fef)Cj = lfg * Cos(ffg)Sj = lfg * Sin(ffg)G1 = Ci * Sj - Cj * Siwef = (Cj * (vxG - vxE) + Sj * (vyG - vyE)) / G1wfg = (Ci * (vxG - vxE) + Si * (vyG - vyE)) / G1vxF = vxE - wef * lef * Sin(fef)vyF = vyE + wef * lef * Cos(fef)G2 = axG - axE + wef ^ 2 * Ci - wfg ^ 2 * CjG3 = ayG - ayE + wef ^ 2 * Si - wfg ^ 2 * Sjeef = (G2 * Cj + G3 * Sj) / G1efg = (G2 * Ci + G3 * Si) / G1axF = axE - eef * lef * Sin(fef) - wef ^ 2 * lef * Cos(fef)ayF = ayE + eef * lef * Cos(fef) - wef ^ 2 * lef * Sin(fef)End Sub5.结果及分析图1 E点的运动轨迹(1)由图1所示,E点的运动轨迹呈稍倾斜“8字形”。
平面连杆机构【1 】一.填空:1.由一些刚性构件用迁移转变副和移动副互相衔接而构成的在统一平面或互相平行平面内活动的机构称为平面连杆机构.2.搭钮四杆机构按两连架杆的活动情势,分为曲柄摇杆机构.双曲柄机构和双摇杆机构三种根本类型.3. 在搭钮四杆机构中,与机架用迁移转变副相连,且能绕该迁移转变副轴线整圈扭转的构件称为曲柄;与机架用迁移转变副相连,但只能绕该迁移转变副轴线摆动的构件摇杆;直接与连架杆相联接,传递活动和动力的构件称为连杆.4.搭钮四杆机构有曲柄的前提(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和.(用文字解释)5. 图1-1为搭钮四杆机构,设杆a最短,杆b最长.试用式子标明它构成曲柄摇杆机构的前提:(1)__a+b≤c+d_____.(2)以__b或d__为机架,则__a__为曲柄.图1-16.在搭钮四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构.7.假如将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构.8. 当机构有极位夹角θ时,则机构有急回特征.9.机构中传动角γ和压力角α之和等于90°.10.平日压力角α是指力F与C点的绝对速度v c之间间所夹锐角.二.选择题:1.在曲柄摇杆机构中,只有当为自动件时,才会消失“逝世点”地位.D.曲柄2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构.B.不消失曲柄C. 有时有曲柄,有时没曲柄D. 以上答案均不合错误3.当急回特征系数为 C. K>1 时,曲柄摇杆机构才有急回活动.A. K<1B. K=1C. K>1D. K=04.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回活动.A.θ<0B.θ=0C. θ≦0D. θ﹥05.当曲柄摇杆机构的摇杆带动曲柄活动对,曲柄在“逝世点”地位的瞬时活动偏向是 C.不肯定的.A.按原活动偏向B.反偏向C.不肯定的D. 以上答案均不合错误6.曲柄滑决机构是由 A. 曲柄摇杆机构演变而来的.A. 曲柄摇杆机构 D. 以上答案均不合错误7.平面四杆机构中,假如最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做.D. 以上答案均不合错误8.平面四杆机构中,假如最短杆与最长杆的长度之和大于其余两杆的长度之和,最短杆为连杆,这个机构叫做.D. 以上答案均不合错误9.D.曲柄滑决机构能把迁移转变活动转换成来去直线活动,也可以把来去直线活动转换成迁移转变活动.D.曲柄滑决机构10.搭钮四杆机构中若最短杆和最长杆长度之和大于其他两杆长度之和时,则机构中B.必定无曲柄消失.A.必定有曲柄消失B.必定无曲柄消失C.是否有曲柄消失还要看机架是哪一个构件.11.为使机构具有急回活动,请求行程速比系数B.K>1.A.K=1B.K>1C.K<112.搭钮四杆机构中有两个构件长度相等且最短,其余构件长度不合,若取一个最短构件作机架,则得到B.双曲柄机构.A.曲柄摇杆B.双曲柄C.双摇杆三.判别图示搭钮四杆机构属哪种根本情势?四.断定题1.曲柄和连杆都是连架杆.(×)2.平面四杆机构都有曲柄.(×)3.搭钮四杆机构的曲柄消失前提是:连架杆或机架中必有一个是最短杆;最短杆与最长杆的长度之和小于或等于其余两杆的长度之和.(√)4.在平面连杆机构中,只要以最短杆作固定机架,就能得到双曲柄机构.(×)5.应用选择不合构件作固定机架的办法,可以把曲柄摇杆机构改变成双摇杆机构.(√)6.应用转变构件之间相对长度的办法,可以把曲柄摇杆机构改变成双摇杆机构.(√)7.搭钮四杆机构依据各杆的长度,即可断定其类型.(×)8.曲柄滑块机构,能把自动件的等速扭转活动,转变成从动件的直线来去活动.(√)9.极位角就是从动件在两个极限地位的夹角.(×)10.极位角越大,机构的急回特征越显著.(√)11.当机构的极位夹角θ=00时,机构无急回特征.(√)12.机构是否消失逝世点地位与机构取谁人构件为原动件无关.(×)13.机构的急回特征系数K的值,是依据极位夹角θ的大小,经由过程公式求得的.14.对曲柄摇杆机构,当取摇杆为自动件时,机构有逝世点地位.(√)15.在曲柄和连杆同时消失的平面连杆机构中,只要曲柄和连杆共线,这个地位就曲直柄的“逝世点”地位.(×)16.曲柄在“逝世点”地位的活动偏向与本来的活动偏向雷同.(×)17.在现实临盆中,机构的“逝世点”地位对工作都是晦气的,处处都要斟酌战胜.(×)18.搭钮四杆机构中,传动角越小,机构的传力机能越好.(×)19.压力角就是自动件所受驱动力的偏向线与该点速度的偏向线之间的夹角.(×)20.压力角是权衡机构传力机能的主要指标.(√)21.压力角越大,则机构传力机能越差.(×)五.简答题1.什么曲直柄?什么是摇杆?搭钮四杆机构曲柄消失前提是什么?2.四杆机构的急回特征是何寄义?什么前提下机构才具有急回特征?3.什么是四杆机构的逝世点?试举出几个应用和战胜逝世点的实例.4.试述压力角的概念,并剖析它对机构的工作机能有什么影响?六.盘算题1.搭钮四杆机构的根本情势有哪几种?如图1-2,已知搭钮四杆机构各构件的长度分离为 a=240mm,b=600mm,c=400mm,d=500mm.试问当分离取为机架时,将各得到何种机构?图1-2。
曲柄连杆机构一、填空题1.曲柄连杆机构主要由机体组、活塞连杆组、曲轴飞轮组。
活塞连杆组由(活塞)、(活塞环)、(活塞销)、(连杆)等组成。
2.活塞环包括(气环)、(油环)两种。
3.在安装气环时,各个气环的切口应该(相互交错),构成迷宫式封气装置,以对气缸中的高压燃气进行有效密封。
4.油环分为(普通油环)和组合油环两种,组合油环一般由(上下刮油片)和(胀簧)组成。
5.在安装扭曲环时,应将其内圈切槽向(上),外圈切槽向(下),不能装反。
6.活塞销与活塞销座孔及连杆小头衬套孔的配合,一般都采用(全浮式)配合。
7.连杆由(连杆小头)、(杆身)和(连杆大头)三部分组成。
8.曲轴的曲拐数取决于发动机的(气缸数目)和(排列方式)。
9.曲轴按支承型式的不同分为(全支承曲轴)和(非全支承曲轴);按加工方法的不同分为(整体式)和(组合式)。
10.曲轴前端装有驱动配气凸轮轴的(正时齿轮),驱动风扇和水泵的(皮带轮),止推片等,有些中小型发动机的曲轴前端还装有(起动爪),以便必要时用人力转动曲轴。
11.飞轮边缘一侧有指示气缸活塞位于上止点的标志,用以作为调整和检查(点火正时)和(点火间隙)的依据。
二、选择题1.将气缸盖用螺栓固定在气缸体上,拧紧螺栓时,应采取由中央对称地向四周扩展的顺序分几次拧紧。
2.对于铝合金气缸盖,为了保证它的密封性能,在装配时,必须在(冷状态)状态下拧紧。
因为铝膨胀系数大,热起来时可以保证密封的可靠性。
铸铁气缸盖可以热状态下拧紧。
3.一般柴油机活塞顶部多采用(凹顶),汽油机活塞顶部多采用(平顶)。
4.为了保证活塞能正常工作,冷态下常将其沿径向做成(B)的椭圆形。
A.长轴在活塞销方向;B.长轴垂直于活塞销方向;C.A、B均可;D.A、B均不可5.在负荷较高的柴油机上,第一环常采用(梯形环)。
6.直列式发动机的全支承曲轴的主轴径数等于(气缸数加1 )。
7.按1-2-4-3顺序工作的发动机,当一缸压缩到上止点时,二缸活塞处于(A)行程下止点位置。
课程名:机械设计基础〔第二章〕题型作图、计算题考核点:全铰链四杆机构有曲柄的条件难度系数低难度中等难度高难度题号加*表示***分值6分8分10分1.试根据图中注明的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构、双摇杆机构。
〔6分〕解:a): 因40+110=150<70+90=160,最短杆为机架,固为双曲柄机构。
b):因45+120=165<100+70,最短杆为连架杆,为曲柄摇杆机构。
c)::60+100=160>62+70,为双摇杆机构。
d):50+100<70+90,最短杆为连杆,为双摇杆机构。
*2如下图所示,设已知四杆机构各杆件的长度为: a=150mm,b=500mm,c=300mm,d=400mm。
试问:1)当取杆件d为机架时,是否存在曲柄?如果存在,则哪一杆件为曲柄?2)如选杆件a为机架,则得到什么类型的机构? (8分)解:1〕a+b=150+500<c+d=300+400a为最短杆,固当d为机架时,有曲柄存在,a杆为曲柄。
2〕如选杆件a为机架,则得到双曲柄机构。
*3四杆机构各杆长度如下图所示,试问:1) 取哪个杆件为机架时,为曲柄摇杆机构?2〕取哪个杆为机架时为双曲柄机构?3〕取哪个杆为机架时为双摇杆机构?〔8分〕解:15+120=125<100+70=1701)当以杆长为100、120的杆件为机架时,为曲柄摇杆机构。
2)取以杆长为15的杆件为机架时,为双曲柄机构。
3)取以杆长为70的杆件为机架时,为双摇杆机构。
**4在图示的铰链四杆机构中,已知BC=50,CD=35,AD=30。
求此机构为〔1〕曲柄摇杆机构时,AB的取值X围?〔2〕双曲柄机构时,AB的取值X围?〔3〕双摇杆机构时,AB的取值X围?〔10分〕解:1.曲柄摇杆机构时,X+50≤30+35,则X≤152.双曲柄机构时:30+50≤X+35,或X+30≤35+50,得45≤X≤553.双摇杆机构时:当X不满足杆长之和条件时:有X+50>30+35则X>1530+50>X+35则X<4530+X>35+50则X>55X<30+35+50则X<115即15<X<4555<X<115**5在图示的铰链四杆机构中,已知a=80mm ,b=150mm ,c=120mm, 问若机架d 为变值,则d值在什么X围内可取得双曲柄机构?d值在什么X围内可得双摇杆机构?d值在什么X围内可得曲柄摇杆机构?〔10分〕解:1.双曲柄机构时:d为最短杆,d+150≤80+120,得d≤50mm2.双摇杆机构时:设d为最长杆,d+80>150+120,得d>190mm设d为最短杆d+150>80+120d>50mm或a为最短杆,80+150>120+d,d<110mmd<80+150+120=350mm固:50mm<d<110mm , 190mm<d<350mm为双摇杆机构3.曲柄摇杆机构:a为最短杆:80+150≤d+120 ,d≥110mm或:80+d≤120+150 , d≤190mm110mm≤d≤190mm,为曲柄摇杆机构。
平面连杆机构一、填空:1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。
2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。
3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。
4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。
(用文字说明)5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用式子表明它构成曲柄摇杆机构的条件:(1)__a+b≤c+d_____。
(2)以__b或d__为机架,则__a__为曲柄。
图1-16.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。
7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。
8. 当机构有极位夹角θ时,则机构有急回特性。
9.机构中传动角γ和压力角α之和等于90°。
10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题:1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位置。
A.连杆B.机架C.摇杆 D.曲柄2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。
A.有曲柄存在B.不存在曲柄C. 有时有曲柄,有时没曲柄D. 以上答案均不对3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。
A. K<1B. K=1C. K>1D. K=04.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。
A.θ<0B.θ=0C. θ≦0D. θ﹥05.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。
第2章平面连杆机构典型例题1.图示为两种夹紧机构,试问机构应处于何位置方是最佳夹紧位置?并说明原因。
687a)应转至FE、EC、CD杆的共线位置(作图略)。
此位置为机构的死点。
b)应转至DB、CB杆共线位置(作图略)。
此位置为机构死点。
2.试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”?696(1)、(3)机构正处死点位置。
3.在图示的各四杆机构中,已知各构件的尺寸(由图上量取,图中比例尺l 2µ=mm/mm ),杆AB 为主动件,转向如图所示。
现要求:1)是确定这三种机构有曲柄的条件和各机构的名称;2)机构有无急回运动?若有,试以作图法确定其极位夹角θ,并计算其行程速比系数K ;3)标出各机构在图示位置时的机构传动角γ和压力角α,求作最小传动角min γ和最小压力角min α,并说明机构的传动性能如何? 4)机构是否存在死点位置?4.试求图示各机构在图示位置时全部瞬心的位置(用符号ij P 直接标注在图上)。
5.在图示的齿轮-连杆组合机构中,试用瞬心法求齿轮1 与齿轮3的传动比13/ωω。
解:1) 计算此机构所有瞬心的数目(1)/26(61)/215K N N =−=−=2) 为了求传动比13/ωω需求出如下三个瞬心(填出下角标) 16P 、36P 、13P 。
3) 传动比13/ωω计算公式是3613131613P P DK P P AK ωω==由于构件1 、3在K 点的速度方向相同,从而知3ω与1ω同向。
6.图示为开关的分合闸机构。
已知l AB =150mm ,l BC =200mm ,l CD =200mm ,l AD =400 mm 。
(722)试回答:(1)该机构属于何种类型的机构;(2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ;(3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么?(1)150400200200+>+,不满足有曲柄条件,该机构为双摇杆机构。
大作业(一)平面连杆机构的运动分析(题号:4-B)班级:机制096学号:***********名:***同组其他人员:________________________完成日期:________________________平面连杆机构的运动分析题目试用计算机完成下列平面连杆机构的运动分析。
1.图a 所示的为一平面六杆机构。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。
a )表1 平面六杆机构的尺寸参数(单位:mm )mm l 0.652=',mm x G 5.153=,mm y G 7.41=二、平面连杆机构的运动分析方程 1)位置分析 建立封闭矢量多边形 l 1+l 2=l 4+l 3;l 1+l 2 +l2’=AG +l 5 +l 6; (式1)将机构的封闭矢量方程式(1)写成在两坐标上的投影式,并改写成方程左边仅含未知量项的形式,即得(式2)由于牛顿迭代法不便于限制l5,l6的位置。
故在计算式采用复数矢量法直接求的。
求,;(1)(2)消去θ2得经整理后并可简化为式中:解之可得实际运动中0<θ3<180,故‘ +-’适当选择;求θ5,θ6 :先有则2)角速度分析E点速度;3)角加速度分析;E点加速度采用高斯消去法求角速度,角加速度;三、程序流程图源程序;#include<stdio.h>#include<stdlib.h>#include<math.h>#define PI 3.1415926#define N 4void Solutionangle(double [18],double ); /*矢量法求角位移*/ void Solutionspeed(double [N][N],double [N],double [18],double ); /*角速度求解*/void Solutionacceleration(double [N][N],double [N][N],double [N],double [18]);/*角加速度求解*/void GaussianE(double [N][N],double [N],double [N]);/*高斯消去*/void FoundmatrixA(double [18],double [N][N]); //创建系数矩阵Avoid FoundmatrixB(double [18],double ,double [N]);//创建系数矩阵Bvoid FoundmatrixDA(double [18],double [N][N]);//创建矩阵DAvoid FoundmatrixDB(double [18],double ,double [N]);//创建矩阵DB//定义全局变量double l1=26.5,l2=105.6,l3=67.5,l4=99.4,l5=37.4,l6=28.0;double l2g=65.0,xg=153.5,yg=41.7,inang=60*PI/180,as1=1.0;//主函数void main(){int i,j;FILE *fp;double shuju[36][18];double psvalue[18],a[N][N],da[N][N],b[N],db[N],ang1;//建立文件,并制表头if((fp=fopen("filel","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n The Kinematic Parameters of Point 5\n");fprintf(fp," ang2 ang3 ang5 ang6");fprintf(fp," as2 as3 as5 as6");fprintf(fp," aas2 aas3 aas5 aas6");fprintf(fp," xe ye vex vey aex aey\n");//计算数据并写入文件for(i=0;i<36;i++){ang1=i*PI/18;Solutionangle(psvalue,ang1);FoundmatrixB(psvalue,ang1,b);FoundmatrixA(psvalue,a);Solutionspeed(a,b,psvalue,ang1);FoundmatrixDA(psvalue,da);FoundmatrixDB(psvalue,ang1,db);Solutionacceleration(a,da,db,psvalue);for(j=0;j<4;j++){shuju[i][j]=psvalue[j]*180/PI;}for(j=4;j<18;j++){shuju[i][j]=psvalue[j];}fprintf(fp,"\n");for(j=0;j<18;j++)fprintf(fp,"%12.3f",shuju[i][j]);}fclose(fp);//输出数据for(i=0;i<36;i++){ang1=i*PI/18;printf("\n输出ang1=%d时的求解\n",i*10);printf("angle angspeed angacceleration :\n");for(j=0;j<4;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=4;j<8;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=8;j<12;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=12;j<18;j++)printf("%lf\t",shuju[i][j]);printf("\n");}}/*矢量法求角位移*/void Solutionangle(double value[18],double ang1){double xe,ye,A,B,C,phi,alpha,csn,ang5g,d2,d,ang2,ang3,ang5,ang6;A=2*l1*l3*sin(ang1);B=2*l3*(l1*cos(ang1)-l4);C=l2*l2-l1*l1-l3*l3-l4*l4+2*l1*l4*cos(ang1);ang3=2*atan((A+sqrt(A*A+B*B-C*C))/(B-C));if(ang3<0)//限定ang3大小{ang3=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));}ang2=asin((l3*sin(ang3)-l1*sin(ang1))/l2);xe=l4+l3*cos(ang3)+l2g*cos(ang2-inang);ye=l3*sin(ang3)+l2g*sin(ang2-inang);phi=atan2((yg-ye),(xg-xe));d2=(yg-ye)*(yg-ye)+(xg-xe)*(xg-xe);d=sqrt(d2);csn=(l5*l5+d2-l6*l6)/(2.0*l5*d);alpha=atan2(sqrt(1.0-csn*csn),csn);ang5g=phi-alpha;ang5=ang5g-PI;ang6=atan2(ye+l5*sin(ang5g)-yg,xe+l5*cos(ang5g)-xg);value[0]=ang2;value[1]=ang3;value[2]=ang5;value[3]=ang6;value[12]=xe;value[13]=ye;//限定角度大小for(int i=0;i<4;i++){while(value[i]>2*PI)value[i]-=2*PI;while(value[i]<0)value[i]+=2*PI;}}/*角速度求解*/void Solutionspeed(double a2[N][N],double b2[N],double value[18],double ang1){double ang2,ang3;ang2=value[0];ang3=value[1];double p2[N];GaussianE(a2,b2,p2);value[4]=p2[0];value[5]=p2[1];value[6]=p2[2];value[7]=p2[3];value[14]=-l3*value[5]*sin(ang3)-l2g*value[4]*sin(ang2-inang);value[15]=l3*value[5]*cos(ang3)+l2g*value[4]*cos(ang2-inang);}/*角加速度求解*/void Solutionacceleration(double a3[N][N],double da3[N][N],doubledb3[N],double value[18]){int i,j;double ang2,ang3;ang2=value[0];ang3=value[1];double bk[N]={0};double p3[N];for(i=0;i<N;i++){for(j=0;j<N;j++){bk[i]+=-da3[i][j]*value[4+j];}bk[i]+=db3[i]*as1;}GaussianE(a3,bk,p3);value[8]=p3[0];value[9]=p3[1];value[10]=p3[2];value[11]=p3[3];value[16]=-l3*value[9]*sin(ang3)-l3*value[5]*value[5]*cos(ang3)-l2g* value[8]*sin(ang2-inang)-l2g*value[4]*value[4]*cos(ang2-inang);value[17]=l3*value[9]*cos(ang3)-l3*value[5]*value[5]*sin(ang3)+l2g* value[8]*cos(ang2-inang)-l2g*value[4]*value[4]*sin(ang2-inang);}/*高斯消去法解矩阵方程*/void GaussianE(double a4[N][N],double b4[N],double p4[N]){int i,j,k;double a4g[N][N],b4g[N],t;for(i=0;i<N;i++)for(j=0;j<N;j++)a4g[i][j]=a4[i][j];for(i=0;i<N;i++)b4g[i]=b4[i];//施主对角线上的值竟可能大if(a4g[0][0]<a4g[1][0] && a4g[0][1]>a4g[1][1]){for(j=0;j<N;j++){t=a4g[0][j];a4g[0][j]=a4g[1][j];a4g[1][j]=t;}t=b4g[0];b4g[0]=b4g[1];b4g[1]=t;}if(a4g[2][2]<a4g[3][2] && a4g[2][3]>a4g[3][3]){for(j=0;j<N;j++){t=a4g[2][j];a4g[2][j]=a4g[3][j];a4g[3][j]=t;}t=b4g[2];b4g[2]=b4g[1];b4g[3]=t;}//初等行变换for(j=0;j<N;j++)for(i=0;i<N;i++){if(i!=j){for(k=0;k<N;k++)if(k!=j){a4g[i][k]-=a4g[i][j]/a4g[j][j]*a4g[j][k];}b4g[i]-=b4g[j]*a4g[i][j]/a4g[j][j];a4g[i][j]=0;}}for(i=0;i<N;i++)b4g[i]/=a4g[i][i];p4[0]=b4g[0];p4[1]=b4g[1];p4[2]=b4g[2];p4[3]=b4g[3];}//创建系数矩阵Avoid FoundmatrixA(double value5[18],double a5[N][N]){double ang2,ang3,ang5,ang6;ang2=value5[0];ang3=value5[1];ang5=value5[2];ang6=value5[3];a5[0][0]=-l2*sin(ang2);a5[0][1]=l3*sin(ang3);a5[1][0]=l2*cos(ang2);a5[1][1]=-l3*cos(ang3);a5[2][0]=-l2*sin(ang2)-l2g*sin(ang2-inang);a5[2][2]=l5*sin(ang5);a5[2][3]=l6*sin(ang6);a5[3][0]=l2*cos(ang2)+l2g*cos(ang2-inang);a5[3][2]=-l5*cos(ang5);a5[3][3]=-l6*cos(ang6);a5[0][2]=a5[0][3]=a5[1][2]=a5[1][3]=a5[2][1]=a5[3][1]=0;}//创建系数矩阵Bvoid FoundmatrixB(double value6[18],double ang1,double b6[N]){b6[0]=b6[2]=l1*sin(ang1)*as1;b6[1]=b6[3]=-l1*cos(ang1)*as1;}//创建矩阵DAvoid FoundmatrixDA(double value7[18],double da7[N][N]){double ang2,ang3,ang5,ang6,as2,as3,as5,as6;ang2=value7[0];ang3=value7[1];ang5=value7[2];ang6=value7[3];as2=value7[4];as3=value7[5];as5=value7[6];as6=value7[7];da7[0][0]=-l2*as2*cos(ang2);da7[0][1]=l3*as3*cos(ang3);da7[1][0]=-l2*as2*sin(ang2);da7[1][1]=l3*as3*sin(ang3);da7[2][0]=as2*(-l2*cos(ang2)-l2g*cos(ang2-inang));da7[2][2]=as5*l5*cos(ang5);da7[2][3]=as6*l6*cos(ang6);da7[3][0]=as2*(-l2*sin(ang2)-l2g*sin(ang2-inang));da7[3][2]=as5*l5*sin(ang5);da7[3][3]=as6*l6*sin(ang6);da7[0][2]=da7[0][3]=da7[1][2]=da7[1][3]=da7[2][1]=da7[3][1]=0; }//创建矩阵DBvoid FoundmatrixDB(double value8[18],double ang1,double db8[N]){db8[0]=db8[2]=l1*as1*cos(ang1);db8[1]=db8[3]=l1*as1*sin(ang1);}得出数据;jiao ang2 ang3 ang5 ang6 as2 as3 as5 as6 aas2 aas3 aas5 aas6 vex vey0 39.329 82.523 325.598 123.267 -0.364 -0.364 -2.106 -2.584 0.065 0.605 4.42 4.582 15.987 -25.3 -48.191 3.45810 35.791 79.453 308.065 101.37 -0.34 -0.247 -3.233 -3.736 0.192 0.71 -1.774 -6.069 7.346 -23.234 -49.638 19.20220 32.581 77.609 295.879 86.4 -0.3 -0.121 -2.877 -3.429 0.266 0.725 0.725 -3.084 -0.997 -19.033 -45.237 27.60230 29.828 77.021 286.688 76.547 -0.25 0.002 -2.704 -3.254 0.291 0.669 2.1 -1.259 -8.281 -14.038 -37.988 28.54640 27.579 77.594 278.84 70.118 -0.2 0.11 -2.713 -3.267 0.283 0.572 3.101 0.033 -14.228 -9.365 -30.199 24.40150 25.822 79.164 271.136 65.475 -0.152 0.2 -2.898 -3.514 0.258 0.462 4.358 1.42 -18.855 -5.654 -22.943 17.94460 24.514 81.54 262.355 60.628 -0.11 0.272 -3.264 -4.045 0.23 0.356 6.796 3.96 -22.282 -3.115 -16.445 11.22570 23.609 84.538 250.648 52.508 -0.072 0.325 -3.717 -4.794 0.203 0.26 12.436 10.302 -24.633 -1.682 -10.596 5.41180 23.059 87.993 233.633 36.895 -0.039 0.363 -3.706 -5.092 0.182 0.177 21.373 22.181 -26.009 -1.142 -5.241 1.02890 22.827 91.758 212.277 13.352 -0.008 0.388 -2.652 -4.097 0.166 0.105 19.269 23.261 -26.486 -1.23 -0.291 -1.772100 22.886 95.709 192.907 348.876 0.02 0.401 -1.39 -2.688 0.155 0.043 8.187 11.83 -26.134 -1.671 4.258 -3.03110 23.215 99.735 179.35 328.766 0.046 0.403 -0.633 -1.742 0.148 -0.013 2.177 4.612 -25.026 -2.207 8.349 -2.894120 23.803 103.74 171.086 313.49 0.071 0.396 -0.618 -1.321 0.144 -0.063 2.053 2.131 -23.252 -2.612 11.883 -1.569130 24.641 107.636 166.438 301.951 0.096 0.381 -0.335 -1.004 0.141 -0.108 1.238 1.535 -20.917 -2.7 14.749 0.688140 25.726 111.343 163.988 293.121 0.121 0.359 -0.172 -0.774 0.139 -0.149 0.668 1.136 -18.148 -2.335 16.845 3.578150 27.053 114.792 162.729 286.295 0.145 0.33 -0.092 -0.599 0.136 -0.185 0.272 0.88 -15.086 -1.434 18.104 6.765160 28.619 117.918 161.961 281.015 0.168 0.295 -0.07 -0.462 0.131 -0.216 -0.009 0.705 -11.878 0.023 18.515 9.895170 30.413 120.667 161.189 276.972 0.19 0.255 -0.09 -0.351 0.122 -0.242 -0.208 0.567 -8.668 1.997 18.144 12.626180 32.419 122.995 160.062 273.919 0.21 0.21 -0.139 -0.263 0.108 -0.262 -0.345 0.436 -5.582 4.39 17.137 14.66190 34.613 124.867 158.341 271.626 0.228 0.164 -0.208 -0.199 0.088 -0.276 -0.432 0.296 -2.711 7.061 15.715 15.783200 36.96 126.259 155.87 269.847 0.241 0.115 -0.288 -0.161 0.063 -0.285 -0.481 0.141 -0.105 9.839 14.15 15.88210 39.415 127.153 152.563 268.314 0.249 0.064 -0.374 -0.15 0.031 -0.291 -0.503 -0.021 2.237 12.543 12.732 14.933220 41.924 127.541 148.38 266.744 0.251 0.013 -0.462 -0.168 -0.006 -0.294 -0.506 -0.18 4.364 14.994 11.731 12.997230 44.421 127.416 143.317 264.862 0.247 -0.038 -0.55 -0.212 -0.049 -0.298 -0.496 -0.319 6.369 17.027 11.37 10.16240 46.833 126.77 137.39 262.43 0.234 -0.091 -0.635 -0.277 -0.096 -0.303 -0.474 -0.417 8.379 18.493 11.797 6.506250 49.076 125.596 130.639 259.278 0.213 -0.144 -0.715 -0.354 -0.149 -0.309 -0.441 -0.456 10.536 19.253 13.061 2.079260 51.059 123.882 123.118 255.341 0.182 -0.199 -0.788 -0.432 -0.206 -0.318 -0.403 -0.428 12.982 19.173 15.078 -3.129270 52.683 121.614 114.892 250.666 0.141 -0.255 -0.856 -0.5 -0.266-0.326 -0.376 -0.342 15.828 18.113 17.578 -9.172280 53.843 118.776 106.005 245.397 0.089 -0.313 -0.922 -0.55 -0.328 -0.332 -0.383 -0.237 19.116 15.92 20.031 -16.099290 54.431 115.361 96.438 239.706 0.027 -0.37 -0.994 -0.586 -0.386 -0.329 -0.46 -0.188 22.767 12.446 21.555 -23.818300 54.348 111.373 86.051 233.663 -0.045 -0.426 -1.089 -0.626 -0.433 -0.307 -0.658 -0.316 26.513 7.586 20.875 -31.863310 53.512 106.854 74.482 227.008 -0.123 -0.476 -1.237 -0.72 -0.457 -0.253 -1.097 -0.862 29.836 1.371 16.468 -15.719320 51.885 101.9 60.917 218.711 -0.202 -0.512 -1.505 -0.983 -0.442 -0.153 -2.11 -2.388 31.97 -5.876 7.096 -15.719330 49.493 96.686 43.514 205.974 -0.274 -0.526 -2.034 -1.659 -0.376 0.002 -4.052 -5.6 32.023 -13.395 -7.196 -15.719340 46.454 91.482 19.363 183.783 -0.33 -0.509 -2.78 -2.796 -0.255 0.204 -3.32 -5.95 29.302 -19.97 -24.083 -15.719350 42.975 86.637 350.437 152.646 -0.361 -0.454 -2.818 -3.205 -0.096 0.422 2.827 1.495 -15.719 -15.719 -15.719 -15.719。