雷达简介及分类
- 格式:doc
- 大小:12.50 KB
- 文档页数:2

For personal use only in study and research; not for commercial use雷达简介雷达是利用无线电波来测定物体位置的无线电设备。
雷达(radar)原是“无线电探测与定位”的英文缩写。
雷达的基本任务是探测感兴趣的目标,测定有关目标的距离、方问、速度等状态参数。
雷达主要由天线、发射机、接收机(包括信号处理机)和显示器等部分组成。
雷达的工作原理首先是发射机产生足够的电磁能量,经过收发转换开关传送给天线。
天线将这些电磁能量辐射至大气中,集中在某一个很窄的方向上形成波束,向前传播。
电磁波遇到波束内的目标后,将沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被雷达天线获取。
天线获取的能量经过收发转换开关送到接收机,形成雷达的回波信号。
由于在传播过程中电磁波会随着传播距离而衰减,雷达回波信号非常微弱,几乎被噪声所淹没。
接收机放大微弱的回波信号,经过信号处理机处理,提取出包含在回波中的信息,送到显示器,显示出目标的距离、方向、速度等。
了测定目标的距离,雷达准确测量从电磁波发射时刻到接收到回波时刻的延迟时间,这个延迟时间是电磁波从发射机到目标,再由目标返回雷达接收机的传播时间。
根据电磁波的传播速度,可以确定目标的距离为:S=CT/2。
其中S:目标距离,T:电磁波从雷达到目标的往返传播时间,C:光速。
雷达测定目标的方向是利用天线的方向性来实现的。
通过机械和电气上的组合作用,雷达把天线的小事指向雷达要探测的方向,一旦发现目标,雷达读出些时天线小事的指向角,就是目标的方向角。
两坐标雷达只能测定目标的方位角,三坐标雷达可以测定方位角和俯仰角。
测定目标的运动速度是雷达的一个重要功能,—雷达测速利用了物理学中的多普勒原理.当目标和雷达之间存在着相对位置运动时,目标回波的频率就会发生改变,频率的改变量称为多普勒频移,用于确定目标的相对径向速度,通常,具有测速能力的雷达,例如脉冲多普勒雷达,要比一般雷达复杂得多。
简述激光雷达的结构、原理、分类及特点。
激光雷达是一种利用激光技术进行距离测量和目标探测的高精度、高可靠性的雷达系统。
它具有结构简单、测量精度高、抗干扰能力强等优点,被广泛应用于无人驾驶、智能交通、机器人等领域。
本文将从结构、原理、分类及特点四个方面对激光雷达进行简述。
一、激光雷达的结构激光雷达一般由激光器、扫描装置、接收器、信号处理器等组成。
其中,激光器用于发射激光束,扫描装置用于控制激光束的扫描方向,接收器用于接收反射回来的激光信号,信号处理器用于对接收到的信号进行处理和分析。
二、激光雷达的原理激光雷达的原理是利用激光束在空间中的传播和反射来实现距离测量和目标探测。
当激光束照射到目标物体上时,一部分激光能量被物体吸收,另一部分激光能量被反射回来。
接收器接收到反射回来的激光信号后,通过计算激光束的往返时间和光速的值,可以确定目标物体与激光雷达的距离。
同时,通过对激光束的强度、频率等参数的分析,还可以获得目标物体的其他信息,如形状、速度等。
三、激光雷达的分类根据扫描方式的不同,激光雷达可以分为机械式激光雷达和固态激光雷达两种类型。
1.机械式激光雷达机械式激光雷达使用旋转镜片或机械臂等装置来控制激光束的扫描方向。
由于其结构简单、成本低廉等优点,机械式激光雷达在早期的无人驾驶、机器人等领域得到了广泛应用。
但是,机械式激光雷达的扫描速度较慢,对目标物体的探测精度也较低。
2.固态激光雷达固态激光雷达使用电子控制器控制激光束的扫描方向,不需要机械装置。
固态激光雷达具有扫描速度快、精度高、可靠性高等优点,因此在现代无人驾驶、智能交通等领域得到了广泛应用。
四、激光雷达的特点激光雷达具有以下几个特点:1.高精度:激光雷达的测量精度可以达到毫米级别,远高于传统雷达系统。
2.远距离探测:激光雷达可以在百米甚至千米的距离范围内进行目标探测。
3.抗干扰能力强:激光雷达的测量结果不受光照、雨雪等自然环境的影响,抗干扰能力强。
详细简介什么是毫米波雷达毫米波雷达分类及系统构成是怎么的毫米波雷达,是工作在毫米波波段(millimeter wave )探测的雷达。
通常毫米波是指30~300GHz频域(波长为1~10mm)的。
毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。
同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。
与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。
另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。
毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好,在战场上生存能力强。
发展简况毫米波雷达的研制是从上世纪40年代开始的。
50年代出现了用于机场交通管制和船用导航的毫米波雷达(工作波长约为8毫米),显示出高分辨力、高精度、小天线口径等优越性。
但是,由于技术上的困难,毫米波雷达的发展一度受到限制。
这些技术上的困难主要是:随着工作频率的提高,功率源输出功率和效率降低,接收机混频器和传输线损失增大。
上世纪70年代中期以后,毫米波技术有了很大的进展,研制成功一些较好的功率源:固态器件如雪崩管(见雪崩二极管)和耿氏振荡器(见电子转移器件);热离子器件如磁控管、行波管、速调管、扩展的相互作用振荡器、返波管振荡器和回旋管等。
脉冲工作的固态功率源多采用雪崩管,其峰值功率可达5~15瓦(95吉赫)。
磁控管可用作高功率的脉冲功率源,峰值功率可达1~6千瓦(95吉赫)或1千瓦(140吉赫),效率约为10%。
回旋管是一种新型微波和毫米波振荡器或放大器,在毫米波波段可提供兆瓦级的峰值功率。
在低噪声混频器方面,肖特基二极管(见晶体二极管、肖特基结)混频器在毫米波段已得到应用,在100吉赫范围,低噪声混频器噪声温度可低至500K(未致冷)或100K(致冷)。
此外,在高增益天线、集成电路和鳍线波导等方面的技术也有所发展。
雷达技术手册一、引言雷达技术是一种重要的电子技术,可以在空气、海洋、陆地等不同介质中,探测、追踪并识别目标信息,具有广泛的应用价值。
本手册旨在介绍雷达技术的基本概念、原理、分类、应用等方面内容,以期为雷达从业人员以及相关领域研究人员提供指导。
二、概述雷达技术指的是雷达系统运用的一系列相关技术,包括雷达信号处理、雷达波形设计、雷达天线设计、雷达回波信号处理与识别等方面。
雷达技术主要通过传感器感知目标的位置、运动等参数,进而研究目标的特征,实现目标的识别与跟踪等目的。
其主要应用领域包括天气预报、导航定位、军事侦察等。
三、雷达技术的基本原理雷达技术利用电磁波(如微波、X射线)、声波、光学波等信号向目标发射,然后对回波信号进行采集、处理和分析,从而得到目标特征信息。
雷达技术的基本原理包括以下几个方面:1.电磁波的发射与接收;2.雷达回波信号的处理;3.雷达信号的分析与识别;4.雷达系统的跟踪与定位。
四、雷达技术的分类雷达技术按照其应用领域、工作频率、工作方式等可分为各种不同类型,如:1.按应用领域可分为气象雷达、军事雷达、民用雷达等;2.按工作频率可分为口径雷达、相控阵雷达等;3.按工作方式可分为主动雷达、被动雷达等。
五、雷达技术的应用雷达技术在军事、民用、科学等方面都有广泛的应用,主要包括:1.军事方面:雷达在军事上可以用来探测、跟踪和识别敌军舰艇、飞机等目标,同时也可以用来纠正舰艇、飞机等平台的航向、俯仰和横滚等参数;2.民用方面:雷达在民用航空、海洋等方面可以用来进行导航、遥测、航管、天气预报等工作;3.科学方面:雷达在科学研究中可以用来探测天体、地质勘探等领域。
六、结论综上所述,雷达技术是一种重要的电子技术,在探测、追踪以及识别目标方面具有广泛的应用价值。
本手册对雷达技术的基本概念、原理、分类、应用等方面进行了介绍,希望对从事雷达领域研究的人员以及相关领域研究人员提供帮助。
雷达的资料1. 介绍雷达(Radar)是由Radio(射频)和Detection(侦测)两个词组成的缩写词,是一种利用电磁波进行远距离目标探测和测量的技术。
雷达技术广泛应用于航空、军事、气象、导航、地质勘探等领域。
本文将详细介绍雷达的原理、分类以及应用。
2. 原理雷达的工作原理基于电磁波的特性以及目标的反射。
雷达系统发射高频电磁波,这些波通过空间传播,并当波束遇到目标时,部分电磁波会被目标表面反射回来。
雷达接收器接收反射回来的波,并根据接收到的信号计算目标的位置、速度、距离等参数。
3. 分类根据使用的频率范围、工作方式和应用领域的不同,雷达可以分为不同的类型:- 基于频率范围的分类: - X波段雷达 - C波段雷达 - S波段雷达 - L波段雷达 - Ku波段雷达 - Ka波段雷达 - 基于工作方式的分类: - 连续波雷达(CW雷达) - 脉冲雷达 - 多普勒雷达 - 合成孔径雷达(SAR) - 基于应用领域的分类: - 军用雷达 - 气象雷达 - 航空雷达 - 地质勘探雷达 - 海洋雷达4. 应用雷达技术在各个领域中都有重要的应用。
以下是一些常见的雷达应用: ### 4.1 军事应用雷达在军事中起到了非常重要的作用。
它可以用于远距离探测敌方目标,提供战场情报,指引导弹和飞机等武器系统。
此外,雷达还可以用于侦测隐形飞机、导弹和潜艇等敌方威胁。
4.2 气象应用气象雷达用于测量降水、云团和其他气象现象,帮助气象学家预测天气变化。
通过测量反射回来的电磁波强度和频率变化,气象雷达可以提供降水的类型、强度和分布等信息。
4.3 航空应用航空雷达用于飞行安全和导航。
它可以检测飞行器和其他飞行物体,帮助飞行员避开障碍物,提供飞行路径规划和导航。
航空雷达在机场和航空监控系统中广泛使用。
4.4 地质勘探应用地质雷达可用于勘探地下的水、矿产、地层、沉积物和其他地质特征。
它可以通过检测不同类型物质的电磁波反射信号来提供地下结构和特征的图像。
军用雷达分类军用雷达是军事领域中不可或缺的重要设备,用于侦测、识别、跟踪和定位目标,为军事作战提供关键信息。
根据不同的用途和功能,军用雷达可以分为多种不同类型。
一、侦察雷达侦察雷达主要用于探测敌方目标的位置和运动状态,以便进行作战规划和决策。
侦察雷达的特点是较高的探测距离和较低的探测精度,通常能够探测到较大的目标,如飞机、舰艇和导弹。
其中,长程侦察雷达可以探测到数百公里外的目标,而短程侦察雷达则通常用于地面目标的探测。
二、导航雷达导航雷达主要用于飞行器和舰艇的导航和定位,以确保其准确地到达目的地。
导航雷达的特点是高精度和高可靠性,能够在复杂的气象条件下正常工作。
如舰载雷达可以根据卫星信号和地面信标,精确确定舰艇的位置和航向。
三、火控雷达火控雷达主要用于武器系统的瞄准和跟踪,以确保武器的命中率和杀伤力。
火控雷达的特点是高精度和高速度,能够迅速跟踪目标并进行精确瞄准,如舰载防空雷达和坦克火控雷达等。
四、预警雷达预警雷达主要用于对敌方作战行动和军事威胁的早期探测和预警,以便及时采取应对措施。
预警雷达的特点是大范围探测和长时间监视,能够探测到多种目标,如飞机、导弹和舰艇等。
如空中预警雷达可以在数百公里以外探测到敌方飞机和导弹的轨迹。
五、干扰雷达干扰雷达主要用于对敌方雷达系统进行干扰和欺骗,以降低其探测和跟踪能力。
干扰雷达的特点是高功率和高频率,能够产生强烈的电磁波干扰,如电子干扰系统和光电干扰系统等。
六、多功能雷达多功能雷达是目前发展的趋势,它集侦察、导航、火控、预警和干扰等功能于一体,能够适应多种战斗环境和作战需求。
多功能雷达的特点是灵活多变和高性能,能够自适应地进行多种任务,如陆军的多功能雷达车和空军的多功能预警机等。
军用雷达是现代战争的关键技术之一,其不断发展和创新,将为军事作战提供更加精确、可靠和高效的支持。
雷达简介及分类英文中的“radar”(雷达)一词来源于缩略语(RADAR),表示“radio detection and ranging”(无线电检测与测距)。
现如今,由于它已经成为一项非常广泛实用的技术,“radar”一词也变成一个标准的英文名词。
它是利用目标对电磁波的散射来发现,探测、识别各种目标,测定目标坐标和其它情报的装置。
在现代军事和生产中,雷达的作用越来越显示其重要性,特别是第二次世界大战,英国空军和纳粹德国空军的“不列颠”空战,使雷达的重要性显露的非常清楚。
雷达由天线系统、发射装置、接收装置、防干扰设备、显示器、信号处理器、电源等组成。
其中,天线是雷达实现大空域、多功能、多目标的技术关键之一;信号处理器是雷达具有多功能能力的核心组件之一。
雷达的分类:雷达种类很多,分类方法也很复杂,以下列举部分分类方法:(1)按定位方法可分为:有源雷达、半有源雷达和无源雷达。
(2)按装设地点可分为;地面雷达、舰载雷达、航空雷达、卫星雷达等。
(3)按辐射种类(雷达信号形式)可分为:脉冲雷达和连续波雷达、脉部压缩雷达和频率捷变雷达等。
(4)按照角跟踪方式可分为:单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫描雷达等。
(5)按工作频段可分为:米波雷达、分米波雷达、厘米波雷达和其它波段雷达、超视距雷达、微波雷达、毫米波雷达以及激光雷达等。
(6)按照目标测量参数可分为:测高雷达、二坐标雷达、三坐标雷达和故我识对雷达、多站雷达等。
(7)按照天线扫描方式可分为:分为机械扫描雷达、相控阵雷达等。
(8)按照雷达采用的技术和信号处理的方式可分为:相参积累和非相参积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描边跟踪雷达。
(9)按用途可分为:空中监视雷达(如远程预警、地面控制的拦截等)、空间和导航监视雷达(弹道导弹告警、卫星监视等)、表面搜索和战场监视雷达(地面测绘、港口和航道控制)、跟踪和制导雷达(表面火控、弹道制导等)、气象雷达(降雨和风的观测和预测等)、天文和大地测量雷达(行星观测等).见:【雷达系统】(张明友、汪学刚); Skolink.【introduction to radar symtems(third edition)】.McGram-Hill Book .。
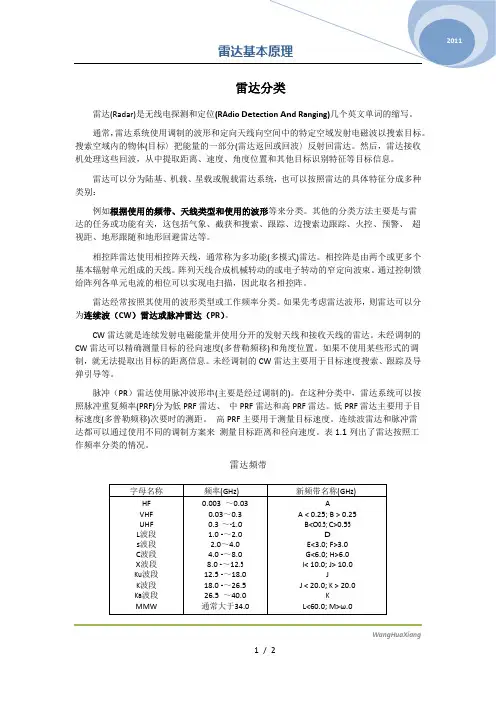
雷达分类雷达(Radar)是无线电探测和定位(RAdio De tection An d Ranging)几个英文单词的缩写。
通常,雷达系统使用调制的波形和定向天线向空间中的特定空域发射电磁波以搜索目标。
搜索空域内的物体(目标〉把能量的一部分(雷达返回或回波〉反射回雷达。
然后,雷达接收机处理这些回波,从中提取距离、速度、角度位置和其他目标识别特征等目标信息。
雷达可以分为陆基、机载、星载或舰载雷达系统,也可以按照雷达的具体特征分成多种类别:例如根据使用的频带、天线类型和使用的波形等来分类。
其他的分类方法主要是与雷达的任务或功能有关,这包括气象、截获和搜索、跟踪、边搜索边跟踪、火控、预警、超视距、地形跟随和地形回避雷达等。
相控阵雷达使用相控阵天线,通常称为多功能(多模式)雷达。
相控阵是由两个或更多个基本辐射单元组成的天线。
阵列天线合成机械转动的或电子转动的窄定向波束。
通过控制馈给阵列各单元电流的相位可以实现电扫描,因此取名相控阵。
雷达经常按照其使用的波形类型或工作频率分类。
如果先考虑雷达波形,则雷达可以分为连续波(CW)雷达或脉冲雷达(PR)。
CW雷达就是连续发射电磁能量并使用分开的发射天线和接收天线的雷达。
未经调制的CW雷达可以精确测量目标的径向速度(多普勒频移)和角度位置。
如果不使用某些形式的调制,就无法提取出目标的距离信息。
未经调制的CW雷达主要用于目标速度搜索、跟踪及导弹引导等。
脉冲(PR)雷达使用脉冲波形串(主要是经过调制的)。
在这种分类中,雷达系统可以按照脉冲重复频率(PRF)分为低PRF雷达、中PRF雷达和高PRF雷达。
低PRF雷达主要用于目标速度(多普勒频移)次要时的测距。
高PRF主要用于测量目标速度。
连续波雷达和脉冲雷达都可以通过使用不同的调制方案来测量目标距离和径向速度。
表1.1列出了雷达按照工作频率分类的情况。
雷达频带WangHuaXiang子包括美国使用的工作在5-28 MHz频段内的超视距后向散射(U.S.OTHIB)雷达、美国海军使用的可再定位超视距雷达(ROTHR) ,以及俄罗斯使用的“啄木鸟”雷达。
雷达名词解释
雷达,是英文“Radio Detection And Ranging”的音译,源于一战时期的战场探测技术,现已广泛应用于军事、民用航空、气象、航海等多个领域。
雷达利用电磁波在空间中传播和反射的特性,对目标进行探测、定位、识别和跟踪。
雷达的工作原理是发射电磁波,当电磁波遇到目标时,一部分电磁波会被目标反射回来,被雷达接收并分析。
通过分析反射回来的电磁波,雷达可以确定目标的位置、距离、速度、方向等信息。
雷达的种类很多,按照用途可以分为军用雷达和民用雷达;按照工作频段可以分为微波雷达、毫米波雷达、激光雷达等;按照工作方式可以分为脉冲雷达、连续波雷达等。
其中,脉冲雷达是常见的一种,它发射短暂的电磁波脉冲,然后接收反射回来的脉冲信号。
通过这种方式,脉冲雷达可以精确地测量目标的距离和速度。
雷达的应用非常广泛。
在军事领域,雷达被用于探测敌方飞机、导弹、舰船等目标,为防空和作战提供重要信息。
在民用航空领域,雷达被用于航管,确保飞机安全起降和航行。
在气象领域,雷达被用于探测降雨、风暴等天气现象,为天气预报和防灾减灾提供依据。
在航海领域,雷达被用于探测船舶、冰山、海岸线等,保障航行安全。
随着科技的发展,雷达技术也在不断进步。
现代雷达采用了先进的数字技术、信号处理技术和计算机技术,提高了探测性能和分辨率。
同时,新型雷达材料、天线设计和制造技术也在不断发展,推动了雷达技术的创新和应用拓展。
车用雷达分类
随着汽车科技的不断发展,车用雷达在汽车行业中的应用越来越广泛。
根据其应用和实现的功能不同,车用雷达可以分为以下几类:
1.自适应巡航雷达:自适应巡航雷达可以通过感知前方行驶中的车辆和障碍物,自动调整车速以保持与前面车辆的安全距离。
一旦前方车辆
减速或停车,自适应巡航雷达也会相应地减速或停车,以避免碰撞。
2.盲区探测雷达:盲区探测雷达可以帮助司机检测盲区并警告驾驶员,以防止时有发生的事故。
当车辆靠近侧面或后方另一辆车时,盲区雷
达将发出声音或闪烁的指示灯来提醒驾驶员。
3.侧向探测雷达:侧向探测雷达是基于自适应巡航雷达上的技术,它可以检测车辆在一旁的位置,确保驾驶员能够安全地变道。
4.车道偏离预警雷达:车道偏离预警雷达利用摄像头和雷达技术,检测车道线的位置,确保车辆在正确的车道上行驶。
当车辆驶出车道时,
车道偏离预警雷达会发出声音或振动驾驶员的座位,以醒目提醒而让
驾驶员及时调整方向。
除了以上几种车用雷达,还有很多其他类型,例如前方碰撞预警雷达,
交通信号识别雷达等等。
不管是哪一种车用雷达,其主要目的都是帮助驾驶员更加安全地驾驶车辆。
随着技术的不断进步,更加先进且功能更强的车用雷达也将陆续问世,为未来的驾驶带来更多的便利和安全性。
浅议雷达技术及军用雷达发展趋势众所周知,雷达探测目标的原理是模仿蝙蝠夜间飞行捕食过程,即通过天线发出无线电波,无线电波遇到障碍物就反射回来,显示在荧光屏上,从而发现目标。
当前,雷达技术已广泛应用于导航、海洋、气象、环境、农业、森林、资源勘测等领域,在军事侦察中,雷达更是将利用电磁波对目标检测、定位、跟踪、成像、识别的功能发挥的淋漓尽致。
那么雷达究竟经历了怎样的发展历程?军用雷达怎么分类?又有什么样的技术和发展趋势呢?一、雷达发展历史简介1 早期雷达的发展雷达的基本概念形成于20世纪初。
但直到第二次世界大战前后,雷达才得到迅速发展。
1922年,意大利Gˑ马可尼发表了无线电波可能检测物体的论文。
同年,美国海军实验室利用双基地连续波雷达检测到在其间通过的木船。
1925年,美国开始研制能测距的脉冲调制雷达,并首先用它来测量电离层的高度。
1936年,美国研制出作用距离达40km、分辨力为457m的探测飞机的脉冲雷达。
1938年,英国已在邻近法国的本土海岸线上布设了一条观测敌方飞机的早期报警雷达链CH(Chain Home)。
2 二战期间的雷达发展1939年英国科学家发明了大功率磁控管,克服了甚高频雷达波束和频带窄的缺点,使实用雷达步入了微波频段。
1940年由英国设计的10cm波长的磁控管在美国生产。
20世纪40年代美国辐射研究室把微波新技术应用于军用机载、陆基和舰载雷达取得成功,其代表产品是SCR -270 机载雷达、SCR -584 炮瞄雷达和AN/APQ-机载轰炸瞄准相控阵雷达。
二战中,俄、法、德、意、日等国都独立发展了雷达技术,但除美、英外,雷达频率都不超过600MHz。
3 50、60年代的雷达发展上世纪50、60年代,由于航空航天技术的飞速发展,出现了诸如脉冲多普勒雷达、合成孔径雷达、相控阵雷达体制等新体制雷达。
新一代雷达发展方向是全固态电扫相控阵多功能雷达。
雷达信号和数据处理的数字化革命、半导体元件、大规模和超大规模集成电路的应用,使雷达技术的发展日臻完善并达到比较高的水平。
激光雷达是一种使用激光束进行距离测量的传感器,广泛应用于自动驾驶汽车、无人机、机器人和工业自动化等领域。
本文将简要介绍激光雷达的结构原理、分类及特点。
一、结构原理激光雷达主要由激光发射器、接收器、光电探测器、信号处理器和数据处理器等组成。
激光发射器发射激光脉冲,激光束照射到检测目标上后,部分激光被目标物体散射,激光束经接收器接收后,光电探测器将激光信号转化为电信号,经过信号处理器处理后传输至数据处理器进行数据处理和分析。
二、分类根据工作原理和实现功能的不同,激光雷达可以分为机械式激光雷达、固态激光雷达和混合式激光雷达。
机械式激光雷达通过旋转或振动的方式改变激光束的方向;固态激光雷达由固定的激光发射与接收单元组成,通过改变激光的发射和接收方式实现测距;混合式激光雷达集成了机械式和固态的优点,能够实现更精准的测距和目标识别。
三、特点1.高精度:激光雷达能够实现毫米级的精准测距,对于自动驾驶汽车等应用场景具有重要意义。
2.多目标检测:激光雷达可以同时探测多个目标,并能够对目标进行精确的定位和跟踪。
3.抗干扰能力强:激光雷达对光照、雨雪等天气条件的影响较小,能够在复杂环境下稳定工作。
4.高可靠性:激光雷达采用光学原理进行测距,不受电磁干扰,工作稳定可靠。
5.成本较高:激光雷达的制造成本较高,限制了其在一些低成本应用场景中的推广。
激光雷达具有高精度、多目标检测、抗干扰能力强和高可靠性等特点,是自动驾驶汽车、无人机等智能设备中不可或缺的核心传感器之一。
随着激光雷达技术的不断发展和成熟,其应用领域将会进一步扩大,为人类社会带来更多便利和安全。
基于上述内容,我们可以进一步探讨激光雷达在不同领域的应用和发展趋势。
一、自动驾驶汽车激光雷达是自动驾驶汽车中至关重要的传感器之一。
通过激光雷达的高精度测距和多目标检测能力,自动驾驶汽车可以实现对车辆、行人和障碍物的实时识别和定位,从而实现智能的避障和自动驾驶功能。
随着自动驾驶技术的不断发展,激光雷达的应用将会得到进一步扩展和深化,成为推动自动驾驶汽车商业化的关键技术之一。
现代新型军用雷达种类及功用介绍
军用雷达是一种用于发现目标并确定其位置的电子战系统,被称为战场千里眼。
自问世迄今,历经70多年的发展,雷达可谓战功卓着。
对此,英国首相丘吉尔曾经有过高度评价:凭借当时只有极少数人知道的雷达设施,我们挫败了德国对大不列颠的攻击,雷达的进展使我们这个岛国获得无限安全走出了第一步。
而今,千里眼雷达在信息化战争中更是得到广泛应用,其战略地位和作用可谓举足轻重。
■人丁兴旺种类繁多
现代新型军用雷达种类繁多,按照用途分类主要有:预警雷达、搜索警戒雷达、无线电测高雷达、气象雷达、航行管制雷达、引导雷达、炮瞄雷达、战场监视雷达、机载截击雷达、导航雷达以及防撞和敌我识别雷达等等;而按照雷达信号形式又可分为:脉冲雷达、连续波雷达、脉冲压缩雷达、噪声雷达、频率捷变雷达等;按照雷达天线扫描方式,则可分为机械扫描雷达和电扫描雷达;按照雷达信号处理方式还可以分为运动目标显示雷达、脉冲多普勒雷达、频率分集雷达、极化分集雷达、合成孔径雷达等。
然而,虽然军用雷达种类很多,但按照雷达基本功能却主要可分为搜索雷达和跟踪雷达两大类。
主流激光雷达分类及原理激光雷达是一种常用于环境感知和距离测量的传感器,通过发射激光束并测量其返回时间来获取目标物体的距离和形状信息。
根据其工作原理和应用方式的不同,可以将激光雷达分为以下几类:1.旋转式激光雷达:旋转式激光雷达通过旋转的方式获取环境中的点云数据。
它通常由一个旋转部件和一个固定的激光发射器和接收器组成。
旋转式激光雷达通过旋转发射激光束,并接收激光束经反射回来的信号来测量目标物体的距离和位置。
这种激光雷达可以快速地扫描周围的环境,并生成高密度的点云数据,广泛应用于自动驾驶、机器人导航等领域。
2.固态激光雷达:固态激光雷达是指整个雷达都是固态的,没有旋转部件。
它通常使用多个固态激光发射器和接收器,每个发射器和接收器可以独立控制发射和接收激光束。
通过同时发射多个激光束,并分别接收它们的返回信号,固态激光雷达可以以较高的精度获取目标物体的位置和形状信息。
固态激光雷达具有较高的可靠性和抗震能力,适合在恶劣环境中使用。
3.相位调制激光雷达:相位调制激光雷达是一种通过改变激光束的相位来测量目标物体距离的方式。
它通常使用一个光学干涉器将激光束分成两个相位不同的激光束,分别照射到目标物体上。
当两个激光束返回时,它们会在干涉器上叠加,形成干涉信号。
通过分析干涉信号的相位差,可以计算出目标物体到雷达的距离。
相位调制激光雷达具有较高的测量精度和远距离测量能力,适用于需要高精度测量的应用场景。
4.三维激光雷达:三维激光雷达是一种可以同时获取目标物体的位置和形状信息的激光雷达。
它通常使用一个发射器和多个接收器来获取激光束经目标物体反射回来的信号,并通过分析信号的时间延迟和强度来计算目标物体的距离和形状。
三维激光雷达可以生成更加精确和完整的目标物体模型,广泛应用于机器人导航、三维建模等领域。
总之,激光雷达是一种重要的环境感知传感器,根据其工作原理和应用方式的不同,可以分为旋转式激光雷达、固态激光雷达、相位调制激光雷达和三维激光雷达等类型。
雷达简介及分类
英文中的“radar”(雷达)一词来源于缩略语(RADAR),表示“radio detection and ranging”(无线电检测与测距)。
现如今,由于它已经成为一项非常广泛实用的技术,“radar”一词也变成一个标准的英文名词。
它是利用目标对电磁波的散射来发现,探测、识别各种目标,测定目标坐标和其它情报的装置。
在现代军事和生产中,雷达的作用越来越显示其重要性,特别是第二次世界大战,英国空军和纳粹德国空军的“不列颠”空战,使雷达的重要性显露的非常清楚。
雷达由天线系统、发射装置、接收装置、防干扰设备、显示器、信号处理器、电源等组成。
其中,天线是雷达实现大空域、多功能、多目标的技术关键之一;信号处理器是雷达具有多功能能力的核心组件之一。
雷达的分类:
雷达种类很多,分类方法也很复杂,以下列举部分分类方法:
(1)按定位方法可分为:有源雷达、半有源雷达和无源雷达。
(2)按装设地点可分为;地面雷达、舰载雷达、航空雷达、卫星雷达等。
(3)按辐射种类(雷达信号形式)可分为:脉冲雷达和连续波雷达、脉部压缩雷达和频率捷变雷达等。
(4)按照角跟踪方式可分为:单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫
描雷达等。
(5)按工作频段可分为:米波雷达、分米波雷达、厘米波雷达和其它波段雷达、超视距雷达、微波雷达、毫米波雷达以及激光雷达等。
(6)按照目标测量参数可分为:测高雷达、二坐标雷达、三坐标雷达和
故我识对雷达、多站雷达等。
(7)按照天线扫描方式可分为:分为机械扫描雷达、相控阵雷达等。
(8)按照雷达采用的技术和信号处理的方式可分为:相参积累和非相参
积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描
边跟踪雷达。
(9)按用途可分为:空中监视雷达(如远程预警、地面控制的拦截等)、
空间和导航监视雷达(弹道导弹告警、卫星监视等)、表面搜索和战场监视
雷达(地面测绘、港口和航道控制)、跟踪和制导雷达(表面火控、弹道制
导等)、气象雷达(降雨和风的观测和预测等)、天文和大地测量雷达(行星观测等).见:【雷达系统】(张明友、汪学刚); Skolink.【introduction to radar symtems(third edition)】.McGram-Hill Book .。