基于carima模型的广义预测控制器设计
- 格式:docx
- 大小:37.03 KB
- 文档页数:2
对角CARIMA模型多变量广义预测控制改进算法
李奇安;褚健
【期刊名称】《控制理论与应用》
【年(卷),期】2007(24)3
【摘要】为了增强多变量广义预测控制算法(MGPC)的实用性,对其实现形式进行了进一步的简化.利用对角CARIMA模型的结构特点,先对系统中单个输出变量期望值的自由响应部分进行分解推导,将其表达成自由响应项系数与系统输入输出变量已知值乘积的形式,得到此输出变量的预测表达式,然后将系统所有输出变量的预测表达式代入目标函数中,得到的控制增量等于控制器系数与参考轨迹、过程输入输出历史数据的乘积.控制器系数只与模型参数及设计参数有关,求解控制量时不再需要进行模型输出预报,控制器结构简单,实现容易.对比实验结果表明了该方法保持了常规MGPC方法的优秀控制性能.
【总页数】4页(P423-426)
【作者】李奇安;褚健
【作者单位】浙江大学,先进控制研究所,工业控制技术国家重点实验室,浙江,杭州,310027;浙江大学,先进控制研究所,工业控制技术国家重点实验室,浙江,杭
州,310027
【正文语种】中文
【中图分类】TP273
【相关文献】
1.对角CARIMA模型多变量广义预测近似解耦控制 [J], 李奇安;金鑫
2.对角CARIMA模型多变量广义预测控制 [J], 李奇安;褚健
3.对角CARIMA模型多变量广义预测控制器系数直接算法 [J], 李奇安;褚健
4.对角CARIMA模型抗扰约束广义预测控制 [J], 金鑫;池清华;刘康玲;梁军
5.对角CARIMA模型输入输出约束自适应广义预测控制 [J], 李奇安;李平;李悦因版权原因,仅展示原文概要,查看原文内容请购买。
目录第1章概述 .............................................................................................................................................. I II 第2章预测控制的基本原理 (7)第3章基于CARIMA模型的GPC设计 (12)第4章系统软件设计 (19)第5章总结与展望 (31)参考文献 (34)附录 (35)第1章概述1.1 预测控制的背景60年代初,现代控制理论的研究取得了长足的进展,基于性能指标的优化控制理论也日趋成熟,这大大提高了人们对被控对象的认识,为控制工程师们在高层次上设计系统提供了一种有效的手段。
但在控制实践中,许多复杂的工业系统的数学模型很难精确建立,而且对象的结构和参数往往具有一定的不确定性。
从工程应用的角度,人们希望对象的模型尽量简化,系统在不确定性因素的影响下能保持良好的性能(即鲁棒性),且要求控制算法简单,易于实现,以满足实时控制的需要。
实践的需要向控制理论提出了新的挑战,促使人们寻找对模型要求低、控制质量好、在线实现方便的控制算法。
同时计算机的飞速发展为各种新的控制算法的研究提供了物质基础,预测控制就是在这种背景下产生的一种新型计算机控制算法。
1978年,Richalet等人在系统脉冲响应的基础上,提出了模型预测启发控制(MPHC)[1],并介绍了其在工业过程控制中的效果;1982年,Rouhani和Mehra给出了基于脉冲响应的模型算法控制(MAC)[2];Cutler在对象阶跃响应的基础上提出了动态矩阵控制(DMC)[3]。
这些算法以对象的有限阶跃响应或有限脉冲响应为模型,在每一个控制周期内采用滚动推移的方式在线对过程进行有限时域内的优化控制(即滚动优化),它对过程的模型要求低,算法简单,容易实现,同时在优化过程中不断利用测量信息进行反馈校正,在一定程度上克服了不确定性的影响,在复杂的工业过程控制中显现出良好的控制性能。
基于C-R模糊模型的广义预测控制算法
翟春艳;李书臣
【期刊名称】《计算机仿真》
【年(卷),期】2004(021)011
【摘要】该文对非线性系统的建模采用Cao-Ress(C-R)模糊模型,并用卡尔曼滤波算法在线辨识模糊模型的结论参数,从而减少了参数辨识的数量和避免了矩阵的求逆运算,然后在每一个采样点对该系统进行局部动态线性化,根据得到的系统线性化模型对系统采取广义预测控制(GPC)方法得到当前的控制动作.仿真结果表明了该方法的有效性.
【总页数】2页(P80-81)
【作者】翟春艳;李书臣
【作者单位】辽宁石油化工大学信息学院自动化系,辽宁,抚顺,113001;辽宁石油化工大学信息学院自动化系,辽宁,抚顺,113001
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于C-R模糊模型PID控制及在过热汽温系统中的应用 [J], 金飞;王宁
2.基于聚类算法的C-R模糊模型结构辨识 [J], 刘军;薛明;张利建;李桂丽
3.基于改进蚁狮算法的广义预测控制对T-S模糊模型的控制研究 [J], 张文彬
4.基于C-R模糊模型的预测控制的动态特性分析 [J], 刘军;路永华;张雨丽;崔平远;
许晓鸣
5.基于C-R模糊模型的非线性预测控制 [J], 刘军;段培永;许晓鸣
因版权原因,仅展示原文概要,查看原文内容请购买。
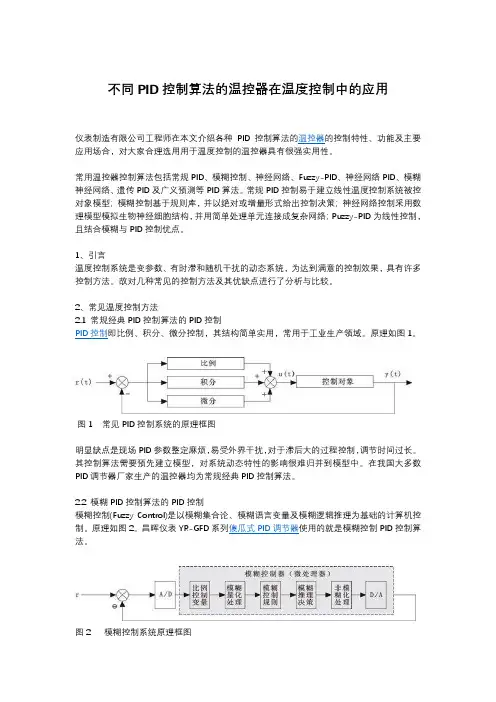
不同PID控制算法的温控器在温度控制中的应用仪表制造有限公司工程师在本文介绍各种PID控制算法的温控器的控制特性、功能及主要应用场合,对大家合理选用用于温度控制的温控器具有很强实用性。
常用温控器控制算法包括常规PID、模糊控制、神经网络、Fuzzy-PID、神经网络PID、模糊神经网络、遗传PID及广义预测等PID算法。
常规PID控制易于建立线性温度控制系统被控对象模型;模糊控制基于规则库,并以绝对或增量形式给出控制决策;神经网络控制采用数理模型模拟生物神经细胞结构,并用简单处理单元连接成复杂网络;Puzzy-PID为线性控制,且结合模糊与PID控制优点。
1、引言温度控制系统是变参数、有时滞和随机干扰的动态系统,为达到满意的控制效果,具有许多控制方法。
故对几种常见的控制方法及其优缺点进行了分析与比较。
2、常见温度控制方法2.1 常规经典PID控制算法的PID控制PID控制即比例、积分、微分控制,其结构简单实用,常用于工业生产领域。
原理如图1。
图1 常见PID控制系统的原理框图明显缺点是现场PID参数整定麻烦,易受外界干扰,对于滞后大的过程控制,调节时间过长。
其控制算法需要预先建立模型,对系统动态特性的影响很难归并到模型中。
在我国大多数PID调节器厂家生产的温控器均为常规经典PID控制算法。
2.2 模糊PID控制算法的PID控制模糊控制(Fuzzy Control)是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机控制。
原理如图2。
昌晖仪表YR-GFD系列傻瓜式PID调节器使用的就是模糊控制PID控制算法。
图2 模糊控制系统原理框图2.3 神经网络PID控制算法的PID控制神经网络控制采用数理模型的方法模拟生物神经细胞结构,用简单处理单元连接形成各种复杂网络,并采用误差反向传播算法(BP)。
原理如图3:图3 神经网络控制系统的原理框图2.4 Fuzzy-PID控制算法的PID控制模糊控制不需知道被控对象的精确模型,易于控制不确定对象和非线性对象。
对角CARIMA模型抗扰约束广义预测控制金鑫;池清华;刘康玲;梁军【摘要】针对存在输入和输入增量约束的多变量系统,提出了一种基于变权重的对角CARIMA模型抗扰动约束广义预测控制算法.根据对角CARIMA模型中的A和C矩阵为对角形式的特点,将多输入多输出系统分解为多个多输入单输出系统进行预测和控制,简化了控制器的设计,降低了变量之间的耦合性.根据模型预测值与参考轨迹之间的偏差实时调整目标函数中各输出跟踪误差的权重,达到抑制由耦合而造成回路之间扰动的目的.权重调整的基本原则是,每个输出的预测值跟踪参考轨迹的权重由其他输出在同时刻偏离其参考轨迹的误差平方加权和构成.当某个输出偏离其目标值时,其他输出的控制作用相对增强,避免输出之间的相互扰动,达到抑制扰动的目的.同时,分析了系统输入和输入增量约束的表达形式.利用多变量广义预测控制(MGPC)以及提出的扰动抑制方法,分别对Shell重油分馏问题进行了仿真实验,仿真结果验证了算法的有效性.【期刊名称】《化工学报》【年(卷),期】2014(065)004【总页数】7页(P1310-1316)【关键词】算法;过程控制;模型预测控制;广义预测控制;扰动抑制;约束控制【作者】金鑫;池清华;刘康玲;梁军【作者单位】浙江大学工业控制研究所,工业控制技术国家重点实验室,浙江杭州310027;浙江大学工业控制研究所,工业控制技术国家重点实验室,浙江杭州310027;浙江大学工业控制研究所,工业控制技术国家重点实验室,浙江杭州310027;浙江大学工业控制研究所,工业控制技术国家重点实验室,浙江杭州310027【正文语种】中文【中图分类】TP273预测控制采用多步预测、滚动优化和反馈校正控制策略,是工业领域使用较多的一种先进控制算法。
实际工业过程往往过程复杂、测量变量多,易受到各种干扰因素的影响,预测控制所采用的模型不能准确描述进入系统的各种扰动,扰动的抑制能力有限,导致系统的控制效果变差。
基于MATLAB的广义预测控制设计方法杨丽华;赵文杰【摘要】热工过程控制具有非线性、大迟延、大滞后、时变、耦合性和不确定性的特点,从而使控制难以得到满意的效果.而广义预测控制具有较强的鲁棒性、对模型要求低的特点,并且适用范围非常广泛.本文介绍了广义预测控制的基本原理和特点,并采用隐式广义预测算法在MATLAB中对单输入单输出系统进行验证.仿真结果表明该算法不仅大大减少了计算量,而且具有较好的控制效果.【期刊名称】《仪器仪表用户》【年(卷),期】2012(019)002【总页数】3页(P82-84)【关键词】广义预测控制;隐式广义预测;模型预测;自校正;仿真【作者】杨丽华;赵文杰【作者单位】华北电力大学控制理论与控制工程学院,保定071003;华北电力大学控制理论与控制工程学院,保定071003【正文语种】中文【中图分类】TP2730 引言热工过程控制的特点是具有较大的惯性和滞后,特别是当机组负荷变化时,参数会有明显的变化,因此就大大降低了传统PID串级控制品质。
针对电厂热工过程具有非线性、时变、大迟延、耦合性和不确定性的特点,使用传统的基于经典的确定性理论的控制方法就难以建立精确的数学模型,从而难以获得满意的控制效果。
广义预测控制是一种新型的计算机控制算法,集多种算法为一体,受到人们的广泛重视。
近十几年来,自校正控制器虽然可以成功应用于实际的系统,但是对于变延时、变阶次和变参数的系统,控制效果不好。
作为一种自校正控制算法,广义预测控制算法是针对离散系统提出的,该算法以CARIMA的模型为基础,采用长时段的优化性能指标,结合辨识和自校正环节,因此就具有较强的鲁棒性和对于系统的模型要求较低的特点。
同时克服了需要试凑得到控制量的加权系数、极点配置等自适应算法中的缺点[1-3]。
文章对GPC的原理算法进行研究,利用GPC的并列预报器间的特点和GPC与DMC控制律的等价性,来推求最优控制律参数,采用了一种隐式广义预测自校正控制算法,并通过仿真验证算法的正确性。
一种约束输入输出的隐式广义预测控制新算法
刘福才;贺浩博
【期刊名称】《计算机仿真》
【年(卷),期】2007(24)6
【摘要】基于CARIMA模型提出了一种约束输入输出的隐式广义预测控制算法.针对广义预测控制问题,在整个预测时域和控制时域,对输入幅值,输入增量和输出幅值施加了约束,引入了输入输出柔化系数,从而简化了目标函数,减小了计算量,该算法不必求解逆矩阵;并采用了隐式广义预测自校正控制算法,利用并列预测控制器间的特点,直接辨识输出预测器中的参数,从而避免了在线求解Diophantine方程.该算法占用内存小,计算速度快,仿真结果表明该算法具有良好的控制性能.
【总页数】4页(P301-303,333)
【作者】刘福才;贺浩博
【作者单位】燕山大学自动化系,河北,秦皇岛,066004;燕山大学自动化系,河北,秦皇岛,066004
【正文语种】中文
【中图分类】TP273
【相关文献】
1.一种约束输入的多变量广义预测控制新算法 [J], 庞中华;金元郁;崔红
2.基于改进粒子群算法的约束隐式广义预测控制 [J], 吴密密;戴文战
3.一种有约束的广义预测控制新算法 [J], 王芳;单锐;刘芳
4.基于改进粒子群算法的隐式广义预测控制 [J], 吴君; 张雨飞; 肖晓
5.一种约束输入的广义预测控制新算法 [J], 金元郁
因版权原因,仅展示原文概要,查看原文内容请购买。
对角CARIMA模型多变量广义预测控制器系数直接算法
李奇安;褚健
【期刊名称】《自动化学报》
【年(卷),期】2007(33)1
【摘要】为了简化多变量广义预测控制MGPC的设计与实现,提出了对角CARIMA(Controlled autoregressive integrated moving average)模型MGPC 控制器系数的直接求解方法.利用多变量对角CARIMA模型直接递推得到了非常简洁的MGPC控制器,控制增量等于控制器系数与设定值、过程输入输出历史数据、模型预测误差历史数据的乘积,控制器系数只与模型参数和设计参数有关,控制器系数维数只由模型结构参数决定.避免了Diophantine方程的求解,减少了在线计算量,简化了MGPC控制器的实现.在一个DCS控制的非线性液位装置上的对比实验结果表明了该方法的有效性.
【总页数】7页(P59-65)
【作者】李奇安;褚健
【作者单位】工业控制技术国家重点实验室浙江大学先进控制研究所,浙江大学玉泉校区,杭州,310027;工业控制技术国家重点实验室浙江大学先进控制研究所,浙江大学玉泉校区,杭州,310027
【正文语种】中文
【中图分类】TP3
【相关文献】
1.对角CARIMA模型多变量广义预测控制 [J], 李奇安;褚健
2.对角CARIMA模型多变量广义预测控制改进算法 [J], 李奇安;褚健
3.对角CARIMA模型抗扰约束广义预测控制 [J], 金鑫;池清华;刘康玲;梁军
4.基于CARIMA模型的多变量极点配置自校正直接算法及其鲁棒性 [J], 舒迪前;张中阳;施宏
5.对角CARIMA模型输入输出约束自适应广义预测控制 [J], 李奇安;李平;李悦因版权原因,仅展示原文概要,查看原文内容请购买。
基于CARIMA模型的自适应预测PID调节器的自适应递推
算式的推导
陈福祥
【期刊名称】《自动化与仪器仪表》
【年(卷),期】1994()1
【摘要】本文针对PID调节器参数整定的困难性问题,提出了基于CARIMA模型的自适应预测PID调节器的结构,并推导了一套相应的自适应递推算式,使PID的参数随着对象特性和环境条件的变化而变化。
从而极大地提高了PID调节器的自适应性。
【总页数】6页(P7-12)
【关键词】过程控制;CARIMA模型;自适应;PID
【作者】陈福祥
【作者单位】武汉工业大学
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.基于CARIMA模型的自适应预测函数控制在锅炉燃烧系统中的应用 [J], 王文兰;张嘉英
2.基于CARIMA模型的全局收敛的多变量随机自适应控制算法 [J], 柴天佑
3.无模型(非建模自适应)控制器与PID调节器的解耦功能?… [J], 韩志刚;罗秋
滨
4.对角CARIMA模型输入输出约束自适应广义预测控制 [J], 李奇安;李平;李悦
5.基于Fuzzy模型的交流伺服系统自适应PID调节器的设计 [J], 左雷鹏;宋词;陈雪松;边慧琴
因版权原因,仅展示原文概要,查看原文内容请购买。
一种简化的广义预测自校正控制器
吴仲光;游少鹏
【期刊名称】《成都科技大学学报》
【年(卷),期】1989(000)001
【摘要】本文基于 CARIMA 模型提出了一种简化的广义预测自校正控制算法,避免了在线求解 Dioaphantine 方程,与 Clarke 的 GPC 算法相比大大节省了运算量与存储量。
理论上证明了两种算法的等价性。
进行了数字仿真和模拟试验,结果令人满意。
该算法已用 z80汇编语言编制成控制程序,正投入单晶炉微机控制系统的工业调试之中。
【总页数】7页(P99-104,112)
【作者】吴仲光;游少鹏
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP278
【相关文献】
1.PI型广义预测自校正控制器的简化算法 [J], 张青;陈增强
2.多变量广义预测控制及一种简化算法 [J], 靳其兵;程云娃;董倩
3.一种简化的受限广义预测控制 [J], 陈雨亭;崔晓波;吕剑虹
4.一种多变量广义预测自校正控制器及其应用 [J], 秦加法;刘曰治
5.一种新型鲁棒广义预测自校正控制器 [J], 袁著祉;陈增强
因版权原因,仅展示原文概要,查看原文内容请购买。
基于carima模型的广义预测控制器设计
1. 什么是Carima模型?
Carima模型是一种时间序列模型,全名为Combined AutoRegressive Integrated Moving Average (CARIMA) Model。
它可以用来描述时间序列之间的相关性和趋势,通常用于预测和建模。
CARIMA模型是由ARIMA和CAR模型组合而成的。
其中,ARIMA是自回归综合移动平均模型,CAR是条件自回归模型。
2. 什么是广义预测控制器?
广义预测控制器是一种控制器设计方法,旨在通过模型预测和反馈调节来实现对系统的控制。
它可以将经验模型和对系统的先验知识结合起来,提高控制精度和可靠性。
广义预测控制器通过预测未来状态和输出,计算出控制器的优化控制信号。
预测过程是基于时间序列或动态模型进行的。
3. 基于Carima模型的广义预测控制器设计
基于Carima模型的广义预测控制器设计主要包括以下步骤:
3.1 建立Carima模型
Carima模型可以通过时间序列数据进行建模,常用方法是最小二乘法。
建立Carima模型可以获得系统的动态特性和趋势,为后面的控制提供信息。
3.2 预测系统输出
在Carima模型的基础上,可以预测系统的未来状态和输出。
预测方法可以采用ARIMA模型,也可以采用基于状态空间的预测方法。
3.3 计算控制信号
根据预测结果,可以计算出控制器的优化控制信号。
计算方法可以采用模型预测控制,也可以采用基于反馈的控制方法。
3.4 调节控制器参数
为了提高控制精度和可靠性,可以通过实验和仿真等方法调节控制器参数。
调节的目的是使控制信号更接近系统的期望输出。
3.5 实现控制
最后,将设计好的控制器实现在系统中,实现对系统的控制。
控制器的实现可以通过硬件控制系统、软件系统或者混合系统来实现。
4. 总结
基于Carima模型的广义预测控制器设计是一种有效的控制方法,可以结合经验模型和先验知识提高控制精度和可靠性。
控制器设计主要包括建立Carima模型、预测系统输出、计算控制信号、调节控制器参数和实现控制等步骤。
实际应用中,还需要根据具体的系统性质和控制要求进行调整和改进。