基于光电组讲义的飞思卡尔智能车设计-课件PPT(精)
- 格式:ppt
- 大小:3.63 MB
- 文档页数:59
飞思卡尔智能车光电资料(doc 8页)基于光耦传感器的控制方法-从离散量到连续量康世胤1,李长城2,莫一林3,顾全全4,陆耿5(1. 清华大学自动化系,北京 100084;2. 清华大学自动化系,北京 100084;3. 清华大学自动化系,北京 100084;4. 清华大学自动化系,北京 100084;5. 清华大学自动化系,北京 100084)摘要: 第一届“飞思卡尔”杯全国大学生智能车邀请赛要求对高速行驶的小车进行实时控制,使其巡线完成比赛赛道。
针对这种要求,我们选择了最成熟的PID控制,尝试了由离散的不完全微分的PD控制到相对连续PD控制的过渡,通过采集光耦传感器输出的模拟量,采用对称求位置法得到连续性较好的位置信息,利用双排传感器计算角度,对位置和角度同时进行PD控制,经过细致调试确定相应参数,并合理利用分段、设置死区等方法,最终小车可以获得较好的稳定性和在高速情况对赛道中心线的跟随特性。
关键词:道路寻迹;PID控制;对称定位;离散;连续Control Method Based on Photoelectric Coupling Device – fromDiscrete Signal to Continual SignalKANG Shiyin1,LI Changcheng2,MO Yilin3,GU Quanquan4,LU Geng5(1. Automation, Tsinghua University, Beijing 100084, China;2. Automation, Tsinghua University, Beijing 100084, China;3. Automation, Tsinghua University, Beijing 100084, China;4. Automation, Tsinghua University, Beijing 100084, China;5. Automation, Tsinghua University, Beijing 100084, China;)Abstract: In the coming FREESCALE College Student Smart Car Competition ’06, real time control strategies are required to be applied in the high-speed model car which to make sure the car tracking the unknown road and finishing 2 laps of game. Based on the requirement we select one of the most well applied proportion-integration-deviation (PID) method. Much works are carried out including trying varies of strategy from initial discrete PD to final continual PD. In the current strategy analog output of photoelectric coupling devices are sampled and converted from A to D. Symmetric positioning method is applied to obtain precise direction information. Furthermore by applying dual sensor array the turning angle is calculated. PD method is applied on location and angle. After careful modification the corresponding parameters are decided empirically. In addition by using some other methods such as track segmentation and dead area presetting, the model car can obtain better status including good stability and fine tracking character in high speed.Key words: Road Tracking, Proportion-Integration-Deviation Control, Symmetric Positioning, Discrete, Continual第一届“飞思卡尔”杯全国大学生智能车邀请赛的赛题是控制比赛小车,使其按要求用尽可能短的时间完成比赛赛道,比赛允许选手自行设计传感器和控制电路,并编写控制程序,禁止改动舵机和轮胎等小车结构。
![[电子教案(PPT版本)]“飞思卡尔”杯智能汽车设计与实例教程 (3)[72页]](https://uimg.taocdn.com/efb98131a5e9856a56126098.webp)
飞思卡尔智能车控制系统硬件设计硬件部分:电机舵机传感器车模电机:主要作用是产生驱动转矩,作为小车的动力源。
舵机:能够转舵并保持舵位的装置,也就是让小车拐弯的装置。
传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,在智能车中,最重要的传感器就是摄像头。
车模:智能车车架,包括底板、齿轮、车轮、电池等等。
主要内容:•MCU最小系统设计•电机及舵机驱动电路设计•光电检测电路原理与设计•图像检测原理与设计1.控制系统的构成一般控制系统由传感器、控制器和执行器组成。
智能车中主要体现:光电器件或器件构成的寻线传感器。
用于操纵小车行走和转向的执行器。
根据传感器信息控制执行器动作的控制器。
三者之间的关系可用如下的关系图描述:飞思卡尔杯规定了比赛用车模、控制器所使用的MCU、执行器、传感器的数量等,比赛中硬件设计所涉及的主要工作是:•设计可靠的MCU控制电路;•执行器驱动电路;•传感器电路;(进行硬件设计的工具很多,建议使用Protel99SE,该软件易上手、效率高,可满足一般电路设计要求。
)MC9S12DG128 的封装2 .MCU最小系统设计MCU最小系统设计分为供电系统设计、复位系统设计、时钟电路设计、BDM调试接口设计、串口通讯设计。
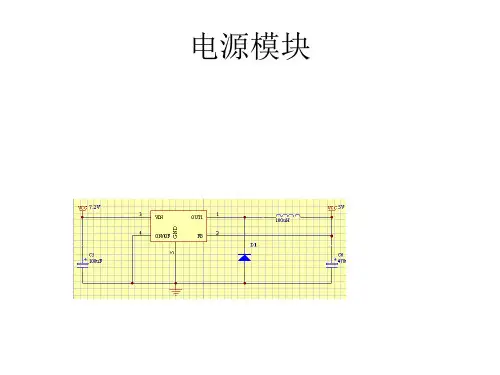
2.1 MCU供电系统设计MCU正常工作需要合理供电,为获取良好的抗干扰能力,电源设计很重要。
针对此次比赛使用的电池和MCU,在供电系统设计中要充分考虑以下因素的影响:1.系统供电电源为7.2V镍氢电池组,不能直接为MCU及其它TTL电路供电。
2.为保证较高的行驶速度,驱动电机需使用电池组直接驱动,故电源电压波动较大。
3.转向用舵机工作电压为5V,其启动电流较大,如与MCU共用5V电源,会引入较大的干扰。
4.采用三端稳压器7805存在效率低、抗干扰能力差的缺点。
采用三端稳压器的电源设计:升降压开关稳压电路•MCU供电飞思卡尔S12系列单片机采用了若干组电源,必须很好的对这些供电电源进行良好的滤波,才能设计出抗干扰能力强的控制器。