E控及AS语言 图文版
- 格式:doc
- 大小:758.50 KB
- 文档页数:20
1.范围本标准包括了ISO9001:2015质量管理体系要求,并规定了额外的航空、航天和防务的行业要求、定义和注释。
需要强调的是本标准规定的要求是对客户和适用法律法规要求的补充(不是取代)如果本标准要求与适用法律法规要求有冲突,以后者优先。
本标准为下列组织规定了质量管理体系要求:a)需要证实其具有稳定提供满足顾客要求和适用法律法规要求的产品和服务的能力;b)通过体系的有效应用,包括体系改进的过程,以及保证符合顾客和适用的法律法规要求,旨在增强顾客满意。
本标准规定的所有要求是通用的,旨在适用于各种类型、不同规模和提供不同产品和服务的组织。
注1:在本标准一中,术语“产品”或“服务”仅适用于预期提供给顾客或顾客所要求的产品和服务;注2:法律法规要求可称作为法定要求。
2 规范性引用文件下列文件对本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO9000:2015 质量管理体系--基础和术语ISO9001:2015 质量管理体系—要求3 术语和定义ISO9000:2015 和下面界定的术语和定义适用于本标准。
3.1 假冒件未授权的复制件、仿造件、替代件,或改装件(如:材料、组件、部件),故意冒充原始或授权制造商特定的真件。
注:假冒件的示例可包括,但不限于,虚假的标记或标签、等级、序列号、日期代码或性能特性。
3.2 关键项目对产品和服务的提供和使用具有重要影响的项目,(如功能、零件、软件、特性、过程),包括安全、性能、形态、装配、功能、可生产性、使用寿命、等),需要特定的措施来确保它们被充分管理。
关键项目的示例包括安全关键项目、破损关键项目、任务关键项目、关键特性等。
3.3 关键特性是一种特性或属性,其变化对产品的转配、形态、功能、性能、使用寿命、或可生产性具有重要影响,因而需要采取特定措施来控制其变化。
3.4产品安全产品的一种状态,能实现其设计或预期目的,而且对人身伤害或财产损失的风险不会造成不可接受的风险。

Copyright© Inspur Group Limited 2014涉密第1页/共80页2015 INSPUR ™文档信息文档修改记录版权及保密性声明本文档中包含的所有信息,无论涉及到浪潮还是其合作伙伴(包括但不限于功能描述、政策、流程、决定、雇员信息、代理及客户信息以及所有的财务信息),都必须绝对保密。
目录1.AS520E-M1规格 (4)2.硬件的连接 (6)2.1.AS520E-M1物理视图 (6)2.2.AS520E-M1扩展柜连接方法 (10)3.AS Manager管理软件安装与基本配置 (11)3.1.安装AS Manager管理软件 (17)3.2.AS Manager客户端软件基本配置 (20)3.2.1.存储设备添加 (20)4.AS520E-M1调试过程 (22)4.1.1.管理存储 (22)4.1.2.存储配置 (25)5.创建主机与映射 (44)5.1.创建FC主机或主机组 (44)5.2.创建ISCSI主机与主机组 (47)5.3.映射主机 (52)5.4.ISCSI主机发现存储 (62)5.4.1.Windows主机 (62)5.4.2.Linux 主机 (67)6.AS520E-M1多路径软件 (69)6.1.AS520E-M1多路径支持情况说明 (69)6.2.WINDOWS系统多路径安装 (70)6.3.LINUX系统多路径安装 (74)7.存储日志(Support data)收集 (79)1.AS520E-M1规格2.硬件的连接2.1. AS520E-M1物理视图AS520E-M1(2U12)前视图AS520E-M1(2U24)前视图AS520E-M1后视图部件介绍前面板介绍○1硬盘插槽○2L ED面板○3外壳把手○4J BOD产品旋转ID开关(只有JBOD扩展柜存在)○5消音按键后面板○1控制器A ○2控制器B ○3电源+风扇模块LED面板硬盘指示灯主柜后面板扩展柜JBOD后面板○1SAS扩展口○2SAS链接指示灯○3J BOD扩展柜指示灯○4抽拉杆和固定螺丝控制器后面板指示灯介绍电源风扇模块介绍○1电源线插口○2电源开关○3电源指示灯○4风扇模块○5固定螺丝○6把手2.2. AS520E-M1扩展柜连接方法AS520E-M1扩展柜连接示意图注意:每台JBOD扩展柜一定要调试JBOD前面板的ID,ID值在整个系统中必须唯一。


航空航天首件检验要求前言1998年12月,航空航天行业本着通过价值流显著改进质量和降低成本的目的,成立了国际航空航天质量组织(IAQG)。
该组织由SAE、SJAC、AECMA主办,由来自美国、亚洲和欧洲航空航天公司的代表组成,一致同意负责本标准的技术内容。
目录1. 介绍………………………………………………………………………………1.1 范围……………………………………………………………………………………………1.2 目的……………………………………………………………………………………………1.3 约定……………………………………………………………………………………………2. 参考文献…………………………………………………………………………3. 定义………………………………………………………………………………4. 适用范围…………………………………………………………………………5.要求………………………………………………………………………………6.表格………………………………………………………………………………6.1 表1:部件号说明……………………………………………………………………………6.2 填写“表1-部件号说明”的指导说明………………………………………………………6.3 表2:产品说明——原材料、特殊过程、功能试验………………………………………6.4 填写“表2-产品说明——原材料、特殊过程、功能试验”的指导说明…………………6.5 表3:特性说明、验证和符合性评价………………………………………………………6.6 表3-续表:特性说明、验证和符合性评价…………………………………………………6.7 填写“表3和表3-续表:特性说明、验证和符合性评价”的指导说明…………………1. 介绍:1.1 范围:本SAE航空航天标准(AS)规定了进行首件检验(FAI)的文件要求。
1.2 目的:首件检验的目的是为正确理解、说明、验证和文件化所有工程设计和规范的要求提供客观证据。
AS/400 CL控制语言基础◇课程大纲:l 第一章概述l 第二章CL 编程l 第三章程序间的通讯l 第四章测试功能◆第一章概述提要:* CL 命令的作用* CL 命令的分类* 系统菜单1.1 CL 命令的作用CL (Control Language) 控制语言是用户与操作系统之间的主要接口。
可以说用户管理和操作AS/400 系统,均可以通过CL实现。
用户在不同的工作站或客户端可以同时使用CL ,其输入方式有五种:* 在命令行输入* 在菜单画面选择* 在work with 菜单中,option 选项* 在CL 程序中执行* 远程调用前三种输入方式给用户提供一种交互式的操作方法,只执行一条命令;第四种方式给用户提供一种操作,并包含逻辑控制,可以完整地实现一项功能;第五种方式给用户提供在客户端直接执行主机操作的接口。
由于CL 使用了统一的命名方法,提供prompt 式的提示功能和具体到域值的在线帮助,以及自动生成命令参数的缺省值, 再加上有效性检查,从而使得CL 的使用变得非常简单、方便和灵活。
1.2 CL 命令的参数CL 使用了一种很科学,较为成功的命名方法。
每条命令由命令名和一系列参数组成。
命令名通常由动词加上接受动词的名词(定义为目标Object)组成,单词通常缩写为三个字母。
例如:CL 命令命令名Send Message SNDMSGCopy File CPYFWork with Device Desripyions WRKDEVDCL 的参数由关键字和参数值组成,关键字通常和命令一样缩写,它用于说明参数的作用,在命令输入屏,按F11 键,即可看到关键字。
在命令行输入命令时,如果参数是按照固定的顺序输入,则可以省略关键字。
例如:SNDMSG MSG (HOLLEO) TOUSR (LENG)命令名关键字参数值大多数CL 都是针对目标而言,目标是一个占据了一定存储空间的实体,它包括自身属性及其数据特征的描述,系统可以对它进行操作。

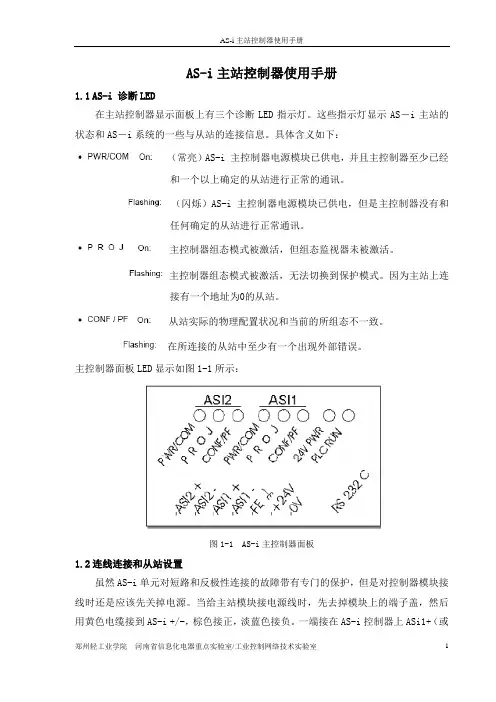
AS-i主站控制器使用手册1.1AS-i 诊断LED在主站控制器显示面板上有三个诊断LED指示灯。
这些指示灯显示AS-i主站的状态和AS-i系统的一些与从站的连接信息。
具体含义如下:(常亮)AS-i 主控制器电源模块已供电,并且主控制器至少已经和一个以上确定的从站进行正常的通讯。
(闪烁)AS-i 主控制器电源模块已供电,但是主控制器没有和任何确定的从站进行正常通讯。
主控制器组态模式被激活,但组态监视器未被激活。
主控制器组态模式被激活,无法切换到保护模式。
因为主站上连接有一个地址为0的从站。
从站实际的物理配置状况和当前的所组态不一致。
在所连接的从站中至少有一个出现外部错误。
主控制器面板LED显示如图1-1所示:图1-1 AS-i主控制器面板1.2连线连接和从站设置虽然AS-i单元对短路和反极性连接的故障带有专门的保护,但是对控制器模块接线时还是应该先关掉电源。
当给主站模块接电源线时,先去掉模块上的端子盖,然后用黄色电缆接到AS-i +/-,棕色接正,淡蓝色接负。
一端接在AS-i控制器上ASi1+(或ASi2+)和ASi-(ASi2-),另外一段接在AS-i电源模块的ASi+和ASi-上,同时利用辅助电源给AS-i控制器的+24V电源供电。
送上电源,AS-i 主站和AS-i电缆都被供上电了。
具体连接方式见图1-2。
如果AS-i 控制器被供电,而该系统上没有连接从站时,绿色的 LED‘+PWR/COM’闪烁。
图1-2 AS-i电源模块及主控制器接线方式通过主站控制器上的按钮配合文本/图形显示可以完成从站地址设置。
方法如下:使用方向向左的按钮(‘Menu')选择控制器菜单,然后使用按钮选择‘Slaves adr.’,确认选择用方向向左的按钮(‘OK’),然后选择‘Easy Startup’。
重要提示:每个从站中存储的地址都是稳定不变的,为了使AS-i主站能与每一个从站进行单独通讯,每个地址在系统网络中只能出现一次,也就是一个地址只能分配给一个从站。
as技术状态管理范本AS技术状态管理范本引言:AS技术状态管理是一种用于跟踪和管理团队成员工作进展的方法。
它旨在提高项目管理的效率,确保项目按时交付并达到预期目标。
本文将介绍AS技术状态管理的步骤和重要性,并提供一个范本来帮助读者更好地实施该方法。
第一步:设定目标与时间表在开始任何项目之前,首先需要确定项目的目标和预期成果。
这些目标应该是明确的、可测量的和可衡量的。
接下来,制定一个时间表,将项目分解为可以实现的里程碑,并设置截止日期。
这将帮助团队成员了解项目的整体方向,并明确各自的任务和职责。
第二步:分配任务和确定优先级将项目分解为具体的任务,并分配给团队成员。
在分配任务时,需要考虑每个成员的技能和兴趣,以及项目的紧迫程度和重要性。
确定任务的优先级是确保项目按计划进行的关键步骤之一。
通过设定优先级,团队成员可以更好地理解他们的工作重点,并合理分配时间和资源。
第三步:设定状态更新频率确定状态更新的频率非常重要,以确保项目进展得以监控和协调。
这可能会根据项目的复杂性和紧迫程度而有所不同。
一般来说,较小的项目可能需要每日或每周更新,而较大的项目可能需要每月或每季度更新。
在确定此频率时,需要与团队成员协商并根据他们的建议进行调整。
第四步:收集和分析数据在每个状态更新周期结束时,收集项目相关的数据。
这可能包括任务完成情况、进展报告和问题列表等。
这些数据应该经过仔细分析,以便了解项目的整体状况和潜在风险。
通过分析数据,团队可以更好地理解项目的健康状况,并采取必要的措施来应对潜在问题。
第五步:报告和交流基于收集到的数据和分析结果,编写状态报告并与团队成员共享。
这些报告应包括项目的整体进展情况、完成的任务、计划外的问题和下一步的行动计划。
确保报告的语言简洁明了,并与团队成员进行沟通,以便他们对项目的状态有清晰的了解,并能够作出相应的调整和决策。
第六步:追踪和监控在状态报告共享后,跟踪和监控团队成员的工作进展非常重要。

佛山隆深机器人有限公司内部技术培训教程川崎机器人接口面板设计川崎机器人接口面板设计篇教程编制:佛山隆深机器人有限公司川崎机器人中国华南区S 级代理商右边这个接口面板设计的漂亮吗?功能是不是相比你现在接触到的机器人接口面板要漂亮呢?而且还是中文的哦!想把你身边的的操作面板变成这样吗?别急,跟我一起来~第一步:按示教器的,在弹出的菜单内选择[辅助功能],然后按示教器的第二步:在弹出的菜单选择[高级设定]进入第三步:在弹出的菜单选择[接口面板]进入.第一步:按示教器的,在弹出的菜单内选择[辅助功能],然后按示教器的第二步:在弹出的菜单选择[高级设定]进入第三步:在弹出的菜单选择[接口面板]进入.第一步:按示教器的,在弹出的菜单内选择[辅助功能],然后按示教器的第二步:在弹出的菜单选择[高级设定]进入第三步:在弹出的菜单选择[接口面板]进入.第一步:按示教器的,在弹出的菜单内选择[辅助功能],然后按示教器的第二步:在弹出的菜单选择[高级设定]进入第三步:在弹出的菜单选择[接口面板]进入这样我们就进入了接口面板的设置界面了.编号下方的方框内输入对应需要设定的软元件类型编号,[登陆]键进入设置页面编号与软元件的位置相对应设置编号与对应位置示教器的[方向键]移动到需要修改的输入框示教器的[方向键]移动到需要修改的输入框示教器上的[数字键]直接修改数值示教器的[方向键]移动到需要修改的输入框示教器上的[数字键]直接修改数值[登陆键]确认修改的数值示教器的[方向键]移动到需要修改的输入框示教器上的[数字键]直接修改数值[登陆键]确认修改的数值注:对于文字/变量输入框按登陆键可进入[键盘操作页面]进行输入数据示教器是无法输入汉字的哦!想用汉字吗?一会告诉你~对于机器人应对相对复杂的生产作业时单页的接口面板往往不够用所以我们要用到不止一个接口面板页面川崎机器人默认是4页的接口面板页面做多可设置8个页面(通过系统开关设置)通过[A键]+[↑/↓]键来切换页面接口面板设置页面也可以通过上面的按键组合进行切换.对于经常保存/加载机器人程序或者会修改系统参数的操作员会经常进入系统菜单.这样通过菜单一步一步进入的话速度会相对慢一些,所以就有了快捷进入的方法.首先:按示教器的[R键],在弹出的对话框内输入对应的R码(菜单编号),然后按[登陆键]直接进入对应的菜单.对于经常保存/加载机器人程序或则会修改系统参数的操作员会经常进入系统菜单.这样通过菜单一步一步进入的话速度会相对慢一些,所以就有了快捷进入的方法.首先:按示教器的[R键],在弹出的对话框内输入对应的R码(菜单编号),然后按[登陆键]直接进入对应的菜单.常用R码:0201:保存程序0202:加载程序0502:系统开关设置0509:接口面板0603:专用输入输出信号显示R码是怎么来的呢?→一级菜单的编号+二级菜单的编号+……(不足两位补0)如何把接口面板改成汉字呢?首先:进入机器人数据保存菜单(R码0201)然后:用[↑↓]键移动到文件名输入框然后:;用手点击(输入文件名),在弹出的(键盘操作页)输入文件名.注:※文件名不能用纯字母或纯数字※可以是字母+数字,也可以加下划线输入完毕后点击(保存数据)选择保存的文件类型.选择完类型后就可以点击保存了.用[方向键]移动光标,用[登陆键]键入需要输入的字符.如果输错了可以用示教器键盘上的[退格键]删除,也可以用(键盘页)上的(BS)删除字符.小提示:可以用[A键]+[方向键]移动光标到字符显示框的任何位置进行插入/删除操作.输入完成后选择(ENTER)返回保存界面,也可以按示教器的[A键]+[登陆键]或者示教器最下方的回车键功能是一样的.1.全部数据:指机器人所有系统数据,包括系统开关设置数据,编码器数据,程序,位姿数据,变量等等,但出错履历和操作履历除外.2.指定程序内数据:仅保存指定程序中的程序数据,位姿数据,变量数据等.3.程序:只保存机器人内部存储的AS程序数据4,5,6就不多讲了,很少用到.7.接口面板数据:包含网络配置,接口面板界面数据,接口面板标题数据,颜色数据.8.出错履历:机器人所有故障数据,包含故障发生的时间,错误编号,错误内容等.10.操作履历:里面记录了你操作了示教器,修改了那些参数,修改了什么.这个数据是判断机器人参数有无被改动过的重要依据.我们常导出的数据类型一般为1,3,7,其他很少用到全部数据扩展名为as,程序为pg,接口面板为if,都可以用电脑自带的记事本直接编辑.当出现最后一行英文的时侯你就可以按[R键]退出这个页面了,否则它会一直停在这个界面它的意思是:不要移除USB存储设备直到指示灯亮起.不管它就是了.可以重复切换保存数据的类型来保存文件,无需更改文件名,因为不同类型的数据扩展名不同,不会发生冲突.在这里强调一下:我们修改数据难免会出错,所以在加载文件的时侯一定要备份原始数据.否则一旦出错很难改回来.除程序和接口面板数据外,其他数据不要加载,以免出错.机器人的信号定义及规范:川崎机器人信号分四类:1.输入信号2.输出信号3.内部信号4.专用信号输入信号是指外部设施给机器人内部处理的信号,信号范围:1001-1128(类似于PLC的X)输出信号是指机器人给外部的控制信号,信号范围:1-128(类似于PLC的Y)内部信号是指机器人内部处理的控制信号2001-(类似于PLC的M)专用信号是指机器人内部设定的专用输出信号(类似于三菱PLC的M8000-)输入信号:显示信号:I5 程序信号:1005输出信号:显示信号:O5 程序信号:5内部信号:显示信号:IN5 程序信号:2005在输入输出显示界面中小写的i/o/in为专用信号(专用输出信号是不受外部条件控制的)外部控制指令控制人为控制机器人控制输入信号√输出信号√√√内部信号√√√专用信号√√谢谢参与本课程授权单位:佛山隆深机器人有限公司教程编写: 闪剑。
wincc 结构变量 as符号WinCC是西门子公司开发的一个人机界面(HMI)软件,主要用于监控和控制工业自动化过程中的设备和系统。
在WinCC中,结构变量是一种数据类型,用于描述具有多个相关字段的复杂数据。
结构变量可以看作是一个容器,其中包含不同类型的字段。
每个字段都有自己的名称和数据类型,并且可以根据需要进行访问和操作。
结构变量的字段可以是基本数据类型,例如整数和浮点数,也可以是其他结构变量。
结构变量的一个重要应用是用来处理复杂的数据。
例如,在一个工业自动化系统中,可能需要同时监控多个传感器,这些传感器具有不同的类型和参数。
通过使用结构变量,可以将传感器的数据以一种组织良好的方式存储起来,便于在监控界面中进行显示和分析。
在WinCC中,结构变量可以用AS符号进行访问。
AS符号是一种类似变量的概念,用于在WinCC中引用和操作结构变量中的字段。
通过AS符号,可以方便地读取和写入结构变量中的数据。
使用AS符号可以实现监视和控制系统中的各种参数。
例如,可以使用AS符号读取传感器的温度数据,并在监控界面上显示出来。
还可以使用AS符号写入控制命令,以控制某个设备的状态。
在这个过程中,AS符号可以直接访问结构变量中与传感器和设备相关的字段,从而实现对它们的操作。
需要注意的是,为了能够正确地引用和操作结构变量中的字段,必须在WinCC中正确地定义和设置这些结构变量。
这包括指定字段的名称和数据类型,以及定义它们之间的关系。
只有在正确设置了结构变量后,才能正确地使用AS符号访问这些字段。
总之,结构变量和AS符号在WinCC中的应用极为重要。
它们提供了一种方便和灵活的方式来处理和操作复杂的数据,从而实现对工业自动化系统的监控和控制。
通过合理的设计和使用,可以使监控界面更加直观和易于操作,提高系统的可靠性和效率。
安装在控制柜上的开关按钮(参照 E系列操作说明书P.2-0~2-8)操作面板(E2x/E4x)NO. 开关灯功能1 示教/自动开关切换示教模式或者自动模式。
2 电源指示灯控制柜通电后,此灯亮。
3 紧急停止按钮发生紧急事态时按下此按钮,将切断马达电源机械手停止运行。
同时马达电源以及循环开始灯都灭。
但是控制电源不会切断。
4 控制电源开关控制柜通电开关。
5 外部存储设备提供外部存储设备的USB端口和PC连接的RS-232端口。
6 操作面板提供操作机器人所需的各种开关。
7 TP连接器用于连接示教器的连接器8 示教器提供示教机器人和编辑数据所需的按钮。
示教器上的操作屏幕用来显示并操作各种数据。
9 示教器挂钩悬挂示教器电缆。
10 硬币锁锁住控制器门。
12Ⅰ.手动操作(示教模式)(参照操作说明书P .5-5~5-10 )手动操作的准备CONTROL POWER(控制电源) ON TEACH(示教模式)MOTOR POWER(马达电源) ON T.LOCK(示教锁定) ONRUN(起动)坐标系键・各个轴 :6轴单独移动・基准:平行于基准坐标的XYZ轴移动・工具:平行于工具坐标的xyz轴移动 插补 手动速度 确认速度SPDT 触发器※切换方法 ※切换方法C 手动速度确认速度 ※切换方法 + A 手动速度键 轴键 确认速度键 T.LOCK 紧急停止Ⅱ.关于程序重复运转(连续运转)时、机械手将从指定点移动到另一个指定点。
程序是指指定机械手作动的顺序(动作顺序)。
命名并保存。
1)辅助一体型程序也称作简易教示、或者简易示教。
辅助数据和位置数据同时示教。
例)教示点插补速度精度时间①④1各轴9102直线2403直线2154各轴910②③2)AS程序使用AS语言做成的程序。
也可能实现从单纯作业驱动高级功能的编程。
例)1.JMOVE #a #a2.LMOVE #b3.LMOVE #c4.JMOVE #a#b #cAS语言是指、为机器人开发的机器人控制用语言系统、处理使用AS语言的用户发出的指令、执行程序控制机器人。
例)1.SP100342.WHERE 等Ⅲ.辅助一体型程序 (参照操作说明书 P .6-7 )1.位置数据以及辅助数据位置数据是指作动时必须的位置数据。
重复运转时、机器人将从指定的点移动到另一个指定点。
在期望的步骤、期望的地方 按下 (记录)可以进行输入。
辅助数据向教示点移动所需的数据。
进行位置教示时、一并输入。
这里使用的是「插补」「速度」「精度」「时间」「夹紧」。
插补 …… 向教示点移动时的工具前端的轨迹(怎么进行移动) ・各軸插补:各个轴按照指定值移动 ・直線插补:2点间的工具前端照直线移动速度 …… 向教示点移动时的速度、单位是%(对应重复速度)0~9这10种按键对应分配好的实际速度(%)。
(参照 P .9-5 )精度 …… 教示点的确定位置的精度、单位mm。
通过以教示点为中心的半径几mm的圆内 。
1~4这4种类的按键对应各个数值。
(参照 P .9-57 )时间 …… 教示点的时间待机0~9这10种按键对应各个数值。
(参照 P .9-59 )夹紧 … 教示点上工具的开关、ON 则打开、OFF 则关闭记录覆盖练习1将下图动作以正面视角做成。
①⑥正面图②⑤③④辅助数据插补速度精度时间各軸插补速度100%精度1mm0.5秒待机②各軸插补速度50%精度100mm无待机时间③直線插补速度20%精度1mm0.9秒待机④直線插补速度80%精度50mm无待机时间⑤各軸插补速度20%精度10mm无待机时间⑥各軸插补速度100%精度50mm无待机时间将以上内容编程。
教示点插补速度精度时间①②编程表单③④⑤⑥562.辅助一体型程序的作成顺序1.作成编程表单2.命名程序① 程序 键 ⇒光标移到Pg 、输入程序名称。
*想输入Pg○○以外的名称时、选择⇒ 文字输入 ⇒ 从 键盘 输入*程序的名称…以英文字母开头符号、空格不可用( .和_可以使用) 15个字以内3.对机器人示教① 显示程序名称、输入准备完成。
② 将机器人移动到步骤1的位置、设定辅助按下 (记录)键。
重复③②、根据动作顺序按1个步骤、输入位置数据以及辅助数据。
记录 覆盖A 插补D7速度E8精度F9计时CL1 +A+ (选择后、通过 键选择输入各轴或者直线)(选择后、根据键盘的数值直接输入)+ or CL1 步骤程序+A73.程序确认 (参照操作说明书P.7-2~7-7 )步骤确认在重复运转输入的程序之前、进行确认运转。
1. 按下 程序 键 ⇒ 选择 键、从程序名称一览开始确认光标对准程序 按下 (enter 键)。
2. ・每一个步骤都确认动作时(确认单一)选择 、边按触发器 按下 (确认前进)。
・通过程序确认动作时(确认连续) 选择 、边按触发器 按下 (确认前进)。
※切换方法重复运转 (参照P.7-1)通过自动运转、以1个循环确认动作。
重复运转的准备CONTROL POWER(控制电源) ON REPEAT(重复模式)MOTOR POWER(马达电源) ON T.LOCK(教示锁定) OFFCYCLE START(循环开始) RUN(启动)1. 按下 程序 键 ⇒ 选择 、从程序名称一览开始自动运转光标移到程序 、按下 (enter 键)。
2. 确认,设定重复条件、重复速度。
※重复条件 重复一次 ※重复速度连续重复3.按下循环开始、选「RUN 」启动机器人。
*以防万一「HOLD ・RUN 」的开关最初设置成「停止」。
确认好周围的安全后前进前进连续R 10% R 50% R100%菜单+A按「RUN」。
重复速度最初设定成低速(10~20%)。
练习2将下图的动作编程。
③⑤⑧⑨教示点插补速度精度时间夹紧123456789101112894.辅助一体型程序的修正方法(参照操作说明书 P.6-20~6-23 )修正程序时1.机器人的开关类设置成和「手动操作的准备」时的相同状态。
2.按下程序 键 ⇒ 选择 键、从程序名一览开始修正选好程序、 步骤 将显示想要修正的步骤编号。
3.通过按键、选择 (位置修正)。
4.将机器人移动到正确位置、按下 (记录)。
3.通过按键、选择 (辅助修正)。
4.修正到正确的辅助数据、按下 (记录)。
3.比如、步骤2和3之间的话、显示步骤3。
4.通过按键、选择 (插入)。
5.设定插入步骤的位置数据和辅助数据、按下 (记录)。
3.通过按键、选择 (删除)、 按下 (记录)。
3.修正位置数据和辅助数据、 按下 + (记录)。
练习3将练习2中输入的程序做下列修正。
・删除步骤2和11 ・在步骤6和7之间插入一个步骤 ・修正放置位置 ・修正辅助数据位置数据的修正辅助数据的修正插入步骤删除步骤位置修正记录 覆盖補助修正 削除 挿入记录 覆盖 记录 覆盖 记录 覆盖覆盖 记录 覆盖A A ※切换方法 + 或者、105.输入输出信号 ( 参照操作说明书 P.6-15~6-16 )输入信号(WX)→ IN 从周边机器输入到机器人的信号 信号数 32(每16回路增设) 例 WX1~WX32等输出信号(OX)→ OUT 从机器人向周边机器输出的信号 信号数 32(每16回路增设 例 OX1~OX32等信号也作为辅助数据的一部分。
信号设定是按+键、光标移到输入位置后、将欲设定的信号通过按键输入。
② OX6(参照操作说明书P.9-75) OX.PREOUT 设定为ON时②~③的区间内、动作开始时想发出OX6的话、在STEP ③设定OX6。
OX.PREOUT 设定为OFF时① ②的区间内、轴一致后想发出OX6的话、在STEP ②设定OX6。
例题将下列信号设定到既有的程序中。
但是、OX.PREOUT 被设定为ON状态 。
输入信号 输出信号WX2 取件位置进入可 OX2 取件完了(1区間) WX3 放置位置进入可 OX3 放置完了(1区間)待机解除(参照操作说明书P.4-19 )使用了输入输出信号的程序在做步骤确认,重复运转时、在不进行外部信号的交换情况下、强制进入下一个步骤的功能。
程序的步骤处于输入信号待机状态时、多功能面板的ステータス信息显示区域显示的是(待机中)。
步骤确认时解除待机先进行到步骤显示的步骤编号、确认前进的情况下继续确认动作。
重复运转时解除待机1.状态信息显示区右下角显示(待机中)时按下这个部位、打开待机画面。
2.想解除当前的输入信号、按下A+待机解除键。
※从C区域打开信号显示画面、可以看到输入输出信号的状态。
Ⅳ.AS程序(参照操作说明书P.6-24 )使用像英文单词似的命令(命令语)作成程序。
和辅助一体型的程序不同、因为程序和位置数据是分离的、要给位置数据命名再进行示教。
*位置的名称相同的话、即使处于不同的程序中也拥有相同的位置数据。
*名称(程序、位置名称、变数、实数)・以英文字母开头・标点、空格不可使用(.和_可用)・15个字以内※位置名称・各轴变位置:位置名的开头加#表示。
位置的数据用轴的角度记忆。
#a1JT1JT2JT3JT4JT5JT60.00 0.00 -90.00 0.00 -90.00 0.00・变换值:位置名的开头加#表示。
位置的数据用从基础原点开始的距离记忆。
a1XYZOAT0500 120 -90 180 901.AS 程序的作成顺序( 参照操作说明书P.6-24 )1.作成程序表单。
2.命名程序。
3.向机器人教示程序。
【AS语言教示画面开始输入时】 (参照P.6-24)① 按下 键、选择AS语言教示画面② C区域显示输入画面、输入文字。
③ 输入后、按下 (记录)。
【从键盘画面开始输入时】① 从菜单键开始选择键盘画面。
② 在EDIT(ED)_ 程序名 下输入程序名称、开始编辑③ 输入完程序后输入 E 、完成程序的输入、编辑。
4.向机器人教示位置。
(参照P.6-20)① 和 辅助一体型的位置修正一样进行教示1.通过按键、选择 (位置修正)。
2.将机器人移动到正确位置、按下 (记录)。
【从键盘画面开始输入时】① 将机器人移动到期望位置② HERE 输入未知名称、enter 。
* 这个方法在输入程序前也可行。
IJ/E 记录覆盖 位置数据的修正位置修正 记录 覆盖练习4将下图的动作进行编程。
在辅助一体型的程序中作为辅助数据的东西,在AS程序中全部都作为命令输入。
例)・各軸插补動作:JMOVE・速度:SPEED・直線插补動作:LMOVE・精度:ACCURACY・各軸插补接近移動:JAPPRO・手臂开・关:OPENI・CLOSEI・直線插补接近移動:LAPPRO・时间:DELAY2.AS 程序的修正方法修正程序时1.机器人的开关类设置成和「手动操作的准备」时的相同状态。
2.按下程序 键 ⇒ 选择 键、从程序名一览开始修正选好程序、 步骤 将显示想要修正的步骤编号。