汇川控制器操作手册
- 格式:pdf
- 大小:2.17 MB
- 文档页数:130
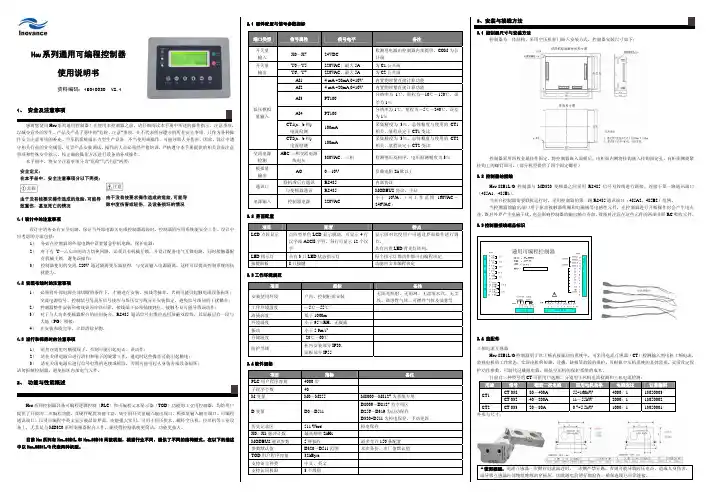
汇川1070控制器面板说明书系统特点控制轴数:单轴;指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);最高输出频率:40KHz(特别适合控制细分驱动器);输出频率分辨率:1Hz;编程条数:99条;输入点:6个(光电隔离);输出点:3个(光电隔离);一次连续位移范围:—7999999~7999999;工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态;升降速曲线:2条(最优化);显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止;手动运行功能:可调整位置(手动的点动速度和点动步数可设定);参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判断功能;回零点功能:可双向自动回到零点;编程指令:共14条指令;外操作功能:通过参数设定和编程,在A操作和B操作端子上加开关可执行外部中断操作;电源:AC220V(电源误差不大于±15%)。
前面板图包括:1、八位数码管显示2、六路输入状态指示灯3、三路输出状态指示灯4、CP脉冲信号指示灯5、CW方向电平指示灯6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、CP、CW、OPTP为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:CP————步进脉冲信号CW————电机转向电平信号OPTO————前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
汇川运动控制手册一、引言汇川运动控制是一款广泛应用于工业自动化领域的软件系统,它提供了丰富的运动控制功能,如运动规划、轨迹控制、位置控制等,为工业生产提供了高效、精确的运动控制解决方案。
本手册旨在帮助用户更好地理解和应用汇川运动控制。
二、汇川运动控制的功能与应用1. 运动规划:汇川运动控制具有强大的运动规划功能,可以根据物体的运动轨迹和速度要求,自动生成最优的运动路径。
2. 轨迹控制:通过调整参数和设置,可以实现对物体运动轨迹的精确控制,满足各种生产需求。
3. 位置控制:可以对物体的位置进行精确控制,实现高精度的运动要求。
4. 速度控制:可以设置不同的速度曲线,实现物体的变速运动,提高生产效率。
5. 广泛应用:汇川运动控制广泛应用于机械制造、自动化生产线、精密测量等领域,为用户提供了高效、精确的运动控制解决方案。
三、操作指南与实例1. 安装与配置:介绍如何安装和配置汇川运动控制软件,包括硬件设备的连接和参数设置。
2. 创建运动任务:通过示例,介绍如何创建各种运动任务,如直线运动、旋转运动、速度控制等。
3. 轨迹调整:介绍如何实时调整物体的运动轨迹,以满足生产过程中的变化需求。
4. 参数调整:通过示例,介绍如何根据实际需求,对驱动器、执行器的参数进行设置和调整。
5. 常见问题及解决方法:提供了一些常见的故障现象和解决办法,帮助用户快速解决问题。
四、常见问题及解决方案1. 运动失控:可能的原因包括驱动器故障、执行器故障或软件故障等,解决方案是更换故障部件或重新安装软件。
2. 轨迹偏差:可能的原因包括环境因素(如温度、湿度等)影响,解决方案是对执行器进行清洁或更换损坏的部件。
3. 速度异常:可能的原因包括驱动器故障或电机故障等,解决方案是更换故障部件或进行维修。
五、高级功能与扩展应用1. 多轴联动:介绍如何实现多轴的同时运动,满足复杂生产工艺的需求。
2. 自定义运动曲线:介绍如何创建自定义的运动曲线,实现更加灵活的运动控制。
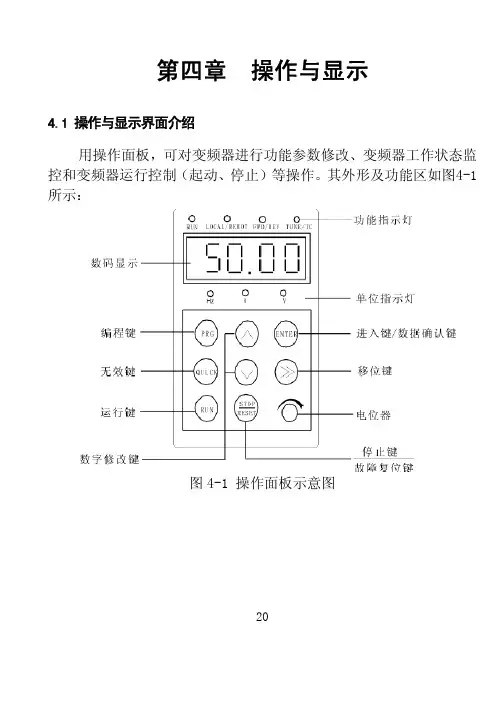
20第四章 操作与显示4.1 操作与显示界面介绍用操作面板,可对变频器进行功能参数修改、变频器工作状态监控和变频器运行控制(起动、停止)等操作。
其外形及功能区如图4-1所示:图4-1 操作面板示意图1)功能指示灯说明:RUN灯亮时表示变频器处于运转状态。
LOCAL/REMOT 键盘操作与远程操作(端子或通讯控制)指示灯,灯亮表示处于远程操作控制状态。
FWD/REV 正反转指示灯,灯亮表示处于正转状态。
TUNE 调谐指示灯,灯亮表示处于调谐状态。
2)单位指示灯说明:Hz 频率单位 Hz+A(rpm) 转速单位A 电流单位 A+V(%) 百分数V 电压单位3)数码显示区:5位LED显示,可显示设定频率、输出频率等各种监视数据以及报警代码4) 键盘按钮说明2122表4-1 键盘功能表按键名称功能 PRG编程键参数菜单进入或退出。
ENTER确认键逐级进入菜单画面、设定参数确认 ∧递增键数据或功能码的递增 ∨递减键数据或功能码的递减 》移位键在运行或者停机状态下,可循环选择显示参数;在设定参数时,可以选择设定数据的修改位 QUICK将来作功能扩展,现在和 》键功能一样 RUN运行 在键盘操作方式下,用于运行操作 STOP/RESET 停止/ 复位 运行状态时,按此键可用于停止运行操作;故障报警状态时,可用来复位操作。
4.2 参数修改和运行状态显示切换操作1: MD300A 变频器的操作面板参数设置采用三级菜单形式,可对参数方便地查询、修改。
三级菜单分别为:功能参数组(一级菜单)→功能码(二级菜单)→功能码设定值(三级菜单)。
操作流程如图4-2所示。
图4-2 三级菜单操作流程图说明:在三级菜单操作时,可按 PRG键或 ENTER键返回二级菜单。
两者的区别是:按 ENTER键将设定参数存入机器,然后再返回二级菜单,并自动转移到下一个功能码;按 PRG键则直接返回上级菜单,不存储参数,并保持停留在当前功能码位置。
汇川运动控制手册引言:汇川运动控制手册为用户提供了关于汇川运动控制器的详细信息和操作指南。
本手册旨在帮助用户了解和使用汇川运动控制器,使其能够更好地应用于各种运动控制系统。
本手册包括了汇川运动控制器的基本功能、安装和驱动程序的设置、运动参数的配置以及与其他设备的通信等内容。
我们希望通过本手册能够帮助用户快速掌握汇川运动控制器的使用方法,并在实际应用中取得良好的效果。
第一章:汇川运动控制器的基本功能本章主要介绍了汇川运动控制器的基本功能。
首先介绍了汇川运动控制器的硬件配置,包括输入输出口、通信接口等。
接着介绍了汇川运动控制器的软件功能,包括运动控制、位置控制、速度控制等。
最后介绍了汇川运动控制器的性能指标,包括步进角度、最大转矩等。
第二章:汇川运动控制器的安装和驱动程序的设置本章主要介绍了汇川运动控制器的安装和驱动程序的设置。
首先介绍了汇川运动控制器的安装方法,包括硬件的连接和固定。
然后介绍了驱动程序的安装方法,包括驱动程序的下载和安装。
最后介绍了驱动程序的设置方法,包括端口号的配置和通信参数的设置。
第三章:汇川运动控制器的运动参数配置本章主要介绍了汇川运动控制器的运动参数配置。
首先介绍了汇川运动控制器的运动方式,包括点位运动、连续运动和插补运动等。
然后介绍了运动参数的配置方法,包括加速度、减速度和速度的设置。
最后介绍了运动规划的方法,包括圆弧插补和直线插补等。
第四章:汇川运动控制器的通信本章主要介绍了汇川运动控制器与其他设备的通信方法。
首先介绍了汇川运动控制器的通信接口,包括串口和以太网口等。
然后介绍了通信协议的配置方法,包括波特率、数据位和校验位等。
最后介绍了通信指令的格式,包括读取和写入寄存器等。
第五章:汇川运动控制器的故障排除本章主要介绍了汇川运动控制器的常见故障及其排除方法。
首先介绍了故障的分类,包括硬件故障和软件故障等。
然后介绍了故障的检测方法,包括故障代码和故障现象的分析。
最后介绍了故障的排除方法,包括重新启动和更换硬件等。

前 言首先感谢您购买使用汇川技术开发生产的AM600系列可编程逻辑控制器及扩展模块!在使用本产品之前,应仔细阅读本手册以及本手册中所介绍的相关手册,同时在充分注意安全的前提下正确操作。
相关手册与本控制器有关的资料如下所列,请根据需要选择使用:◆《AM600系列可编程逻辑控制器硬件手册》(本书),资料编码:19010322◆《AM600-CPU1608TP CPU模块用户手册》,资料编码:19010257◆《AM610-CPU1608TP CPU模块用户手册》,资料编码:19010392◆《AM600系列可编程逻辑控制器软件手册》,资料编码:19010334产品功能特点(1) 产品支持IEC61131-3编程环境,符合PLCopen规范,提供了PLC逻辑控制、Softmotoin、CNC等多轴运动控制功能;(2) 控制器内置16入8出的HSIO端口,支持8个AB相高速计数器,4组脉冲定位;(3) 支持多种现场总线(EtherCAT、CANopen、Profibus-DP);(4) 可通过EtherCAT总线扩展机架,支持更大的 I/O 点数;(4) 更大的程序容量(4M程序存储空间)与数据存储区(8M);(5) 更快的指令执行速度(4ns);(6) 支持更多的高端现场总线(Profibus-DP,EtherCAT,CANopen);(7) 更易用的软件,更符合国内用户应用习惯;(8) 支持在线侦错模式、离线仿真调试;(9) 支持在线编辑下载用户程序。
符合EMC指令的条件AM600系列模块符合欧洲EMC指令2004/108/EC 。
满足标准EN 61131-2:2007 的要求。
- 1 -2系统启动基本流程确认栏请参见本手册4.2小节请参见本手册5.4--5.8小节请参见本手册7.1小节请参见本手册7.1小节请参见本手册7.4小节请参见本手册7.1小节请参见本手册5.8.5小节第1章 安全注意事项第2章 产品信息第3章 规格第4章 固定与安装第5章 接线第6章 编程工具与下载第7章 运行与维护2 14 36 5 73目录前 言 (1)相关手册 (1)产品功能特点 (1)符合EMC指令的条件 (1)系统启动基本流程 (2)1 安全注意事项 (8)2 产品介绍 (12)2.1 型号与铭牌信息 (12)2.1.1 电源模块 (12)2.1.2 CPU模块 (12)2.1.3 数字输入模块 (13)2.1.4 数字输出模块 (13)2.1.5 模拟量模块 (14)2.1.6 温度模块 (14)2.1.7 通信接口模块 (15)2.2 产品配置 (16)2.2.1 产品系统集成图 (16)2.2.2 可安装的模块数及扩展模块数 (18)2.2.3 模块功能说明 (18)2.3 产品组件 (19)2.3.1 必选配件 (19)2.3.2 选配件 (20)3 规格 (24)3.1 系统电气、应用环境规格 (24)3.1.1系统电气规格 (24)3.1.2 应用环境规格 (24)3.2 产品硬件性能指标 (25)3.2.1 CPU模块规格 (25)3.2.2 电源模块规格 (28)3.2.3 数字输入模块规格 (29)3.2.4 数字输出模块规格 (32)3.2.5 模拟输入模块规格 (35)3.2.6 模拟输出模块规格 (37)3.2.7 温度模块规格 (39)3.2.8 EtherCAT通信模块规格 (41)3.2.9 Profibus-DP通信模块规格 (43)3.2.10 CANopen通信模块规格 (45)44 安装与固定 (48)4.1 安装环境要求、安装建议 (48)4.1.1 安装环境 (48)4.1.2 安装空间 (48)4.1.3 安装注意事项 (48)4.2安装方法 (49)4.2.1 模块安装流程 (49)4.2.2 将DIN导轨固定到控制柜内安装平面上 (49)4.2.3 连接电源模块、CPU模块、扩展模块 (50)4.2.4 将连接好的模块组安装到导轨上 (51)4.2.5 安装系统防护组件——尾板 (52)4.3 端子排的拆装 (53)4.4 SD存储卡的拆装 (54)4.5 模块的更换 (55)5 接线 (58)5.1 布线建议 (58)5.1.1 接地要求 (58)5.1.2 布线要求 (59)5.1.3 电源滤波器的安装 (60)5.1.4 绝缘变压器 (60)5.2 线缆选型与制作 (61)5.2.1 线缆选型 (61)5.2.2 叉形线缆制作 (61)5.2.3 管形线缆制作 (62)5.3电源配线 (62)5.3.1 电源模块端子定义 (62)5.3.2 电源模块接线注意事项 (63)5.3.3接地处理 (63)5.4 高速输入输出配线 (64)5.4.1端子信号排列 (64)5.4.2 接线注意事项 (64)5.4.3 外部接线 (65)5.5 普通输入输出模块配线 (68)5.5.1数字输入模块 (68)5.5.2数字量输出模块 (71)5.6 模拟输入输出模块配线 (76)5.6.1 模拟输入模块AM600-4AD配线 (76)5.6.2 模拟输出模块AM600-4DA配线 (78)5.7 温度模块配线 (80)5.7.1 温度模块(AM600-4PT)端子排列及信号定义 (80)5.7.2 温度模块(AM600-8TC)端子信号定义 (81)55.8 通信连接 (82)5.8.1 CPU模块、通信模块线缆连接 (82)5.8.2 通过EtherCAT总线连接 (84)5.8.3 通过Profibus-DP总线连接 (86)5.8.4 通过CANopen/CANlink总线连接 (90)5.8.5 通过RS485的串行通信连接 (92)5.8.6 通过以太网的监控连接 (95)6 编程工具与下载 (98)6.1 编程工具获取 (98)6.2 编程环境与软件安装 (98)6.2.1 环境要求 (98)6.2.2 安装步骤 (98)6.2.3 卸载InoProShop (101)7 运行与维护 (104)7.1 运行与停机操作 (104)7.2 指示灯、MFK键说明 (104)7.2.1 LED故障指示 (104)7.2.2 MFK按键说明 (106)7.3 例行维护保养 (106)7.3.1 日常点检项目 (106)7.3.2 定期点检 (106)7.4 CPU模块数码管显示 (107)7.4.1 故障显示模式 (107)7.4.2 已实现的数码管显示 (107)附录:版本变更记录 (109)6第1章安全注意事项81 安全注意信息 1AM600系列可编程逻辑控制器硬件手册1 安全注意事项◆使用前感谢您购买汇川AM600系列可编程逻辑控制器。
20第四章 操作与显示4.1 操作与显示界面介绍用操作面板,可对变频器进行功能参数修改、变频器工作状态监控和变频器运行控制(起动、停止)等操作。
其外形及功能区如图4-1所示:图4-1 操作面板示意图1)功能指示灯说明:RUN灯亮时表示变频器处于运转状态。
LOCAL/REMOT 键盘操作与远程操作(端子或通讯控制)指示灯,灯亮表示处于远程操作控制状态。
FWD/REV 正反转指示灯,灯亮表示处于正转状态。
TUNE 调谐指示灯,灯亮表示处于调谐状态。
2)单位指示灯说明:Hz 频率单位 Hz+A(rpm) 转速单位A 电流单位 A+V(%) 百分数V 电压单位3)数码显示区:5位LED显示,可显示设定频率、输出频率等各种监视数据以及报警代码4) 键盘按钮说明2122表4-1 键盘功能表按键名称功能 PRG编程键参数菜单进入或退出。
ENTER确认键逐级进入菜单画面、设定参数确认 ∧递增键数据或功能码的递增 ∨递减键数据或功能码的递减 》移位键在运行或者停机状态下,可循环选择显示参数;在设定参数时,可以选择设定数据的修改位 QUICK将来作功能扩展,现在和 》键功能一样 RUN运行 在键盘操作方式下,用于运行操作 STOP/RESET 停止/ 复位 运行状态时,按此键可用于停止运行操作;故障报警状态时,可用来复位操作。
4.2 参数修改和运行状态显示切换操作1: MD300A 变频器的操作面板参数设置采用三级菜单形式,可对参数方便地查询、修改。
三级菜单分别为:功能参数组(一级菜单)→功能码(二级菜单)→功能码设定值(三级菜单)。
操作流程如图4-2所示。
图4-2 三级菜单操作流程图说明:在三级菜单操作时,可按 PRG键或 ENTER键返回二级菜单。
两者的区别是:按 ENTER键将设定参数存入机器,然后再返回二级菜单,并自动转移到下一个功能码;按 PRG键则直接返回上级菜单,不存储参数,并保持停留在当前功能码位置。
MD380-高性能矢量变频器说明书前言前 言首先感谢您购买MD380系列变频器!MD380系列变频器与MD320系列应用场合一致,电机控制性能较MD320变频器有明显提高,并可实现异步电机和永磁同步机控制,增加了用户可编程功能及后台监控软件,支持多种PG卡,功能更强大。
本说明书介绍了如何正确使用MD380系列变频器。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本使用说明书。
另外,请在理解产品的安全注意事项后再使用该产品。
注意事项●为了说明产品的细节部分,本说明书中的图例有时为卸下外罩或安全遮盖物的状态。
使用本产品时,请务必按规定装好外壳或遮盖物,并按照说明书的内容进行操作。
●本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
●由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
●由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
●如果您使用中仍有一些使用问题不明,请与本公司客户服务中心联系。
●全国统一服务电话:400-777-1260前言 MD380-高性能矢量变频器说明书简 介相对于MD320,MD380变频器主要在以下几个方面有明显提升:1)丰富的电压等级支持单相220V、三相220V、三相380V、三相480V、三相690V、三相1140V六个电压等级。
2)丰富的电机种类支持支持三相交流异步电机、三相交流永磁同步电机的矢量控制。
3)丰富的控制方式除有速度传感器矢量控制、无速度传感器矢量控制、V/F控制外,还支持V/F分离控制。
4)丰富的现场总线支持Modbus-RTU、Pro fi bus-DP、CANlink、CANopen四种总线。
5)丰富的编码器类型支持差分编码器、开路集电极编码器、旋转变压器、UVW编码器等。
6)全新的无速度传感器矢量控制算法全新的SVC(无速度传感器矢量控制)相比MD320变频器,带来更好的低速稳定性,更强的低频带载能力,而且支持SVC的转矩控制。

前言首先感谢您购买使用汇川技术开发生产的MD500系列变频器!MD500系列变频器是一款通用高性能电流矢量变频器,主要用于控制和调节三相交流异步电机的速度和转矩,是MD380系列的技术升级产品。
MD500采用高性能的矢量控制技术,低速高转矩输出,具有良好的动态特性、超强的过载能力,具备用户可编程功能及后台软件监控、通讯总线功能,支持多种编码器类型,组合功能丰富强大,性能稳定。
可用于纺织、造纸、拉丝、机床、包装、食品、风机、水泵及各种自动化生产设备的驱动。
初次使用对于初次使用本产品的用户,应先认真阅读本手册。
若对一些功能及性能方面有所疑惑,请咨询我公司的技术支持人员,以获得帮助,对正确使用本产品有利。
符合标准见EMC问题整改部分。
版本变更记录MD500系列通用变频器综合手册版本变更记录版本变更记录MD500系列通用变频器综合手册目录前言 (2)版本变更记录 (4)安全注意事项 (9)第一章产品信息 (15)1.1 铭牌及型号 (15)1.2 各部件说明 (16)第二章系统连接 (21)2.1 MD500系统连接图 (22)2.2 MD500系统构成说明 (23)第三章安装与接线 (24)3.1 安装 (24)3.1.1 安装环境 (24)3.1.2 安装空间与方向 (25)3.1.3 壁挂式和嵌入式安装 (27)3.1.4 机柜内安装 (30)3.1.5盖板的拆卸与安装 (39)3.2 接线 (42)3.2.1 标准接线图 (42)3.2.2 主回路端子功能说明及注意事项 (43)3.2.3 主回路端子分布及尺寸 (48)3.2.4 主回路接线工具要求 (58)3.2.5 控制板 (60)3.2.6 控制回路端子分布 (61)3.2.7控制回路端子接线说明 (62)3.2.8控制回路端子电缆尺寸机紧固力矩 (68)3.2.9 外引操作面板线缆走线 (69)3.2.10 接线检查表 (69)第四章面板操作 (70)4.1 面板操作说明 (70)4.2 LED操作面板介绍 (70)4.2.1功能指示灯 (70)4.2.2 LED显示区 (71)4.2.3 键盘按钮功能 (72)4.2.4参数查看、修改方法 (72)4.2.5 参数组成 (74)4.2.6 参数查阅 (75)4.2.7 多功能按键操作 (79)4.3 LCD操作面板介绍 .........................................80第五章基本操作与试运行 . (82)5.1 快速调试指南 (82)5.2 变频器调试总流程图 (83)5.3 接通电源前确认事项 (86)5.4 接通电源后显示状态确认 (86)5.5 参数初始化 (86)5.6 电机控制方式选择依据 (87)5.7 频率指令选择 (87)5.7.1 操作面板数字设定 (87)5.7.2 模拟量输入(AI) (88)5.7.3 数字脉冲输入(DI5) (90)5.7.4 主频率通讯给定 (90)5.7.5 多段速指令 (91)5.8 启动和停机命令 (92)5.8.1 操作面板启停 (92)5.8.2 端子启停(DI) (92)5.8.3 通讯启停 (95)5.9 启动过程设置 (95)5.9.1 启动方式选择 (95)5.9.2 启动频率 (96)5.10 停机过程设置 (97)5.10.1 停机方式选择 (97)5.10.2 停机直流制动 (98)5.11 加减速时间设置 (98)5.12 观察运行状态 (99)5.12.1 数字量输出DO (99)5.12.2 模拟量输出AO (100)5.13 自学习 (101)第六章参数说明 (103)6.1运行指令设定方法 (103)6.2频率指令输入方法 (108)6.2.1选择主频率指令的输入方法 (108)6.2.2 通过“操作面板”设定主频率(数字设定) (110)6.2.3 通过“模拟量”设定主频率 (110)6.2.4 通过“脉冲”设定主频率 (115)6.2.5 通过“多段指令”设定主频率 (116)6.2.6 通过“简易PLC”设定主频率 (119)6.2.7 通过“PID”设定主频率 (121)6.2.8 通过“通讯”设定主频率 (125)6.2.9选择辅助频率指令的输入方法 (126)6.2.10选择主、辅频率叠加指令的输入方法 (128)6.2.11运行指令绑定主频率指令 (129)6.2.12频率指令极限(频率设定) (130)6.2.13低于下限频率动作设定 (130)6.3启停方法 (131)6.3.1启动方法 (131)6.3.2 停止方式 (133)6.3.3加减速时间和曲线设定 (134)6.4 电机调谐 (136)6.5.控制性能 (139)6.5.1 V/F曲线的设定 (139)6.5.2变频器输出电流(转矩)限制 (141)6.5.3变频器过压失速抑制 (142)6.5.4 提高V/F运行性能 (143)6.5.5 速度环 (144)6.5.6 矢量控制转差调节 (144)6.5.7 SVC速度反馈稳定性 (145)6.5.8 转矩上限 (145)6.5.9电流环参数说明 (148)6.5.10 提高弱磁区性能 (148)6.5.11 FVC运行及性能提升 (148)6.5.12辅助控制参数 (150)6.6保护功能 (150)6.6.1启动保护 (150)6.6.2 电机过载保护设定 (151)6.6.3缺相保护设定 (152)6.6.4故障复位 (153)6.6.5故障动作保护选择 (153)6.6.6电机过热保护选择 (154)6.6.7瞬时停电连续运行(瞬停不停) (154)6.6.8掉载保护 (155)6.6.9过速保护 (156)6.6.10速度偏差过大保护 (156)6.6.11欠压点、过压点设定、快速限流保护 (156)6.7监视 (156)6.8 工艺功能 (163)6.8.1定长控制功能 (163)6.8.2计数功能 (164)6.8.3第二电机参数 (164)6.8.4用户可编程多功能卡功能 (166)6.8.5主从控制 (170)6.9输入输出端子 (175)6.9.1 数字输入端子功能(DI) (175)6.9.2 数字输出端子功能(DO) (178)6.9.3 虚拟数字输入端子功能(VDI) (181)6.9.4 虚拟数字输出端子功能(VDO) (182)6.9.5 模拟量输入端子 (183)6.9.6 模拟量、脉冲输出端子 (184)6.10通讯 (187)6.10.1 读写参数 (188)6.10.2读取状态参数 (190)6.10.3控制命令 (191)6.10.4设定频率、转矩 (193)6.10.5控制数字输出(DO、RELAY、FMR) (193)6.10.6控制模拟量输出、高速脉冲输出(AO、FMP) 1946.10.7初始化参数 (194)6.11辅助功能 (194)6.11.1点动运行 (194)6.11.2跳频、正反转死区时间、反向频率禁止 (195)6.11.3 用户定制参数 (197)6.11.4 频率检测(FDT) (197)6.11.5频率到达检出幅度 (198)6.11.6 加减速时间切换频率点 (198)6.11.7 任意到达频率检测值 (199)6.11.8 零电流检测 (199)6.11.9输出电流超限 (200)6.11.10 任意到达电流 (200)6.11.11 定时功能 (201)6.11.12 AI1电压保护上下限 (201)6.11.13 模块温度 (201)6.11.14 散热风扇 (201)6.11.15 休眠与唤醒 (202)6.11.16 本次运行达到时间 (202)6.11.17 输出功率校正 (202)6.11.18 急停减速时间 (202)第七章故障诊断及对策 (203)7.1 安全注意事项 (203)7.2 变频器试运行前的调整指南 (203)7.3 变频器的警报及故障显示 (205)7.4 故障发生后变频器的再起动方法 (205)7.5 故障报警及对策 (206)7.6常见故障及处理方法 (210)第八章日常保养与维护 (212)8.1 日常保养 (212)8.1.1 日常检查项目 (213)8.2定期检查 (214)8.2.1 定期检查项目 (214)8.2.2 主回路绝缘测试 (215)8.3变频器易损件更换 (215)8.3.1 易损件寿命 (215)8.3.2 冷却风扇的使用数量 (216)8.3.3 冷却风扇更换 (217)8.3.4 滤波电解电容 (220)8.4变频器的存储 (220)8.5变频器的保修说明 (221)第九章规格与选型 (222)9.1 MD500 变频器技术规格与尺寸 (222)9.1.1 技术规格 (222)9.1.2 外型与安装尺寸 (227)9.2选配件一览表 (231)9.3 嵌入式安装支架及开孔尺寸(选配件) (232)9.4 底部安装支架尺寸 (243)9.5 线缆、断路器、接触器选型指导 (244)9.6 交流输入电抗器选型指导 (251)9.7 EMC滤波器选型指导 (259)9.7.1 标准EMC滤波器 (259)9.7.2 简易EMC输入滤波器 (264)9.7.3 安规电容盒和磁环 (266)9.8 制动组件选型指导 (268)9.8.1 制动电阻阻值的选择 (268)9.8.2 制动电阻功率的选择 (268)9.8.3 制动组件选型表 (269)9.8.4 制动单元外形与安装尺寸 (271)9.8.5 AFE单元外形与安装尺寸 (271)9.9 交流输出电抗器选型指导 (271)9.10 DV/DT电抗器选型指导 (277)9.11 输出磁环选型指导 (279)9.12 适配电机选型指导 (280)9.13 外引操作面板安装尺寸 (282)9.13.1 MD32NKE1外引操作面板 (282)第十章应用案例 (283)10.1 主频率源+辅助频率源设定频率应用 (283)10.2 简易PLC的应用 (285)10.3 多段速频率设定频率应用 (287)10.4 模拟量给定恒转矩控制应用 (289)10.5 Modbus- RTU通讯控制应用 (291)10.6 CANLink 3.0总线通讯应用 (293)10.7 张力控制的PID功能应用 (296)10.8 恒压供水闭环PID应用 (298)10.9 Profibus-DP通讯应用 (301)第十一章选配卡 (305)11.1 扩展卡的安装与功能说明 (305)11.1.1 扩展卡的安装 (305)11.1.2 扩展卡的功能说明 (306)11.2 多功能扩展卡的使用 (307)11.2.1 MD38IO1端子分布与功能说明 (307)11.2.2 MD38IO2端子分布与功能说明 (310)11.2.3 MD38IO3端子分布与功能说明 (311)11.2.4 MD38PC1(可编程卡)端子分布与功能说明 31211.2.5 接线及注意事项 (314)11.3 通讯扩展卡的使用 (315)11.3.1 CANlink扩展卡(MD38CAN1)端子分布与功能说明 (315)11.3.2 CANopen扩展卡(MD38CAN2)端子分布与功能说明 (317)11.3.3 RS-485扩展卡(MD38TX1)端子分布与功能说明31911.3.4 Profibus-DP扩展卡(MD38DP2)端子分布与功能说明 (322)11.3.4 Profinet 通讯扩展卡(MD500-PN1)端子分布与功能说明 (325)11.4 编码器扩展卡的使用 (326)11.4.1 编码器扩展卡规格 (326)11.4.2 多功能PG卡(MD38PGMD) (328)11.4.3 旋转变压器PG卡(MD38PG4) (330)11.4.4 PG卡屏蔽层接地说明 (331)11.4.5 EMC指导 (331)附录A 国外标准对应 (332)A.1 对应欧洲标准时的注意事项 (332)A.1.1 符合低电压指令的条件 (332)A.1.2 符合EMC指令的条件 (334)A.1.3 EMC标准介绍 (334)A.1.4 电缆要求及布线 (335)A.1.5 漏电流抑制 (335)A.1.6 常见EMC问题解决建议 (336)A.2 对应UL标准时的注意事项 (336)附录B 通讯 (341)B.1 通讯数据地址定义 (341)B.1.1 MD500参数数据 (341)B.1.2 MD500非参数数据 (342)B.2 Modbus通讯协议 (344)B.2.1 应用方式 (344)B.2.2 总线结构 (344)B.3 通讯资料结构 (345)B.4 参数参数地址标示规则 (347)B.5 FD组通讯参数说明 (350)附录C 功能参数表 (351)C.1 基本功能参数简表 (351)C.2 监视参数简表 (379)安全注意事项MD500系列通用变频器综合手册安全注意事项安全声明 ◆在安装、操作、维护产品时,请先阅读并遵守本安全注意事项。
简介 MD380系列通用变频器用户手册Memo NO. _____Date / /______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________目录前言 (1)简介 (2)开箱验货: (3)初次使用: (3)CE标记: (3)MD380用户手册导读 (11)第一章安全信息及注意事项 (14)1.1 安全事项 (14)1.2 注意事项 (15)第二章产品信息 (20)2.1 产品命名与铭牌标识 (20)2.2 MD380系列变频器各部分名称 (20)2.3 基本技术规格 (22)2.4 外围电气元件及系统构成 (24)2.4.1 外围电气元件使用说明 (26)2.4.2 MD380外围选配件一览表 (26)第三章机械与电气安装 (30)3.1 机械安装 (30)3.1.1 安装环境: (30)3.1.2 安装空间要求 (30)3.1.3 机械安装方法及步骤 (31)3.1.4 机械安装注意事项 (34)3.1.5 变频器盖板拆卸方法 (34)3.2 电气安装 (35)3.2.1 主电路端子说明 (35)3.2.2 变频器主回路接线方式 (36)3.2.3 控制端子说明 (38)3.2.4 变频器控制回路接线方式 (41)3.2.5 变频器电气接线示例 (44)第四章操作显示与应用举例 (46)4.1 操作与显示界面介绍 (46)4.2 功能码查看、修改方法说明 (47)4.3变频器功能码的组织方式 (48)4.4 功能码参数的两种快速查阅模式 (49)4.5 多功能按键的定义与操作 (51)4.6 状态参数的查阅 (51)4.7 变频器的起停控制 (52)4.7.1起停信号的来源选择 (52)4.7.2起动模式 (53)4.7.3停机模式 (54)4.7.4定时停机功能 (55)4.7.5 点动运行 (55)4.8 变频器的运行频率控制 (56)4.8.1主频率给定的来源选择 (56)4.8.2带辅助频率给定的使用方法 (57)4.8.3运行命令切换与频率给定的绑定 (58)4.8.4 频率源为AI模拟量给定的使用 (58)4.8.5 频率源为脉冲给定的使用 (59)4.8.6过程控制的频率闭环控制 (59)4.8.7 摆频工作模式的设置 (60)4.8.8 多段速模式的设置 (60)4.8.9 电机运转方向设置 (60)4.8.10 定长控制模式的设置 (62)4.8.11 变频器计数功能的使用方法 (63)4.9 电机特性参数设置与自动调谐 (63)4.9.1需要设定的电机参数 (63)4.9.2电机参数的自动调谐 (64)4.9.3多组电机参数的设置和切换 (65)4.10 变频器DI端口的使用方法 (65)4.11 变频器DO端口的使用方法 (66)4.12 AI输入信号特性及预处理 (66)4.13 变频器AO端口的使用方法 (67)4.14 变频器PG端口的使用方法 (68)4.15 变频器串行通讯的使用方法 (68)4.16 变频器多功能扩展接口的使用 (69)4.17 密码设置 (69)4.18 参数保存特性与厂家参数恢复 (69)第五章功能参数表 (72)5.1 基本功能参数简表 (72)5.2 监视参数简表 (104)第六章参数说明 (108)F0组基本功能组 (108)F1组第一电机参数 (117)F2组矢量控制参数 (120)F3组 V/F 控制参数 (123)F4组输入端子 (130)F5组输出端子 (140)F6组启停控制 (146)F7组键盘与显示 (151)F8组辅助功能 (155)F9组故障与保护 (165)FA组过程控制PID功能 (173)FB组摆频、定长和计数 (178)FC组多段指令及简易PLC功能 (180)FD组通讯参数 (185)FE组用户定制功能码 (185)FP组用户密码 (187)A0组转矩控制和限定参数 (189)A1组虚拟DI、虚拟DO (191)A2组第2电机参数 (195)A5组控制优化参数 (198)A6组 AI曲线设定 (200)A7组用户可编程功能 (203)A8组点对点通讯 (203)AC组 AIAO校正 (205)U0组监视参数组 (207)第七章 EMC(电磁兼容性) (216)7.1 相关术语定义 (216)7.2 EMC标准介绍 (216)7.2.1 EMC标准 (216)7.2.2 安装环境EMC要求 (216)7.3 EMC外围配件安装选型指导 (217)7.3.1 电源输入端加装EMC输入滤波器 (217)7.3.2电源输入端加装交流输入电抗器 (219)7.3.3 变频器输出侧加装交流输出电抗器 (220)7.4 屏蔽电缆 (222)7.4.1 屏蔽电缆要求 (222)7.4.2 电缆布线要求 (223)7.5 漏电流应对要求 (224)7.6 常见EMC干扰问题整改建议 (224)第八章选型与尺寸 (226)8.1 MD380系列变频器电气规格 (226)8.2 MD380系列变频器外型与尺寸 (229)8.3 功率端子安装尺寸与线径推荐 (234)8.4 外围电气元件选型指导 (244)8.5 外置直流电抗器安装与选型 (247)8.5.1 外置直流电抗器安装 (247)8.5.2 外置电抗器外型与尺寸 (247)8.6 外引键盘的外型尺寸 (249)8.7 制动电阻选型与制动单元 (249)8.7.1 制动电阻阻值的选择 (249)8.7.2 制动电阻功率的选择 (249)8.7.3 制动单元外形尺寸 (252)第九章维护保养与故障诊断 (254)9.1 变频器的日常保养与维护 (254)9.1.1 日常保养 (254)9.1.2 定期检查 (254)9.1.3 变频器易损件更换 (254)9.1.4 变频器的存贮 (255)9.2 变频器的保修说明 (255)9.3 故障报警及对策 (256)9.4 常见故障及其处理方法 (259)附录A:多功能IO扩展卡 MD38IO1 (262)A.1 概述 (262)A.2 机械安装与控制端子功能说明 (262)附录B:迷你型IO扩展卡(MD38IO2)使用说明 (264)B.1 概述 (264)B.2 机械安装与控制端子功能说明 (264)附录C:可编程多功能扩展卡(MD38PC1)使用说明 (265)C.1 概述 (265)C.2 机械安装与控制端子功能说明 (265)附录D:Profibus-DP卡使用说明 (267)D.1 概述 (267)D.2 Profibus-DP卡分类及差异 (267)D.3机械安装与控制端子功能说明 (268)D.4 使用指导 (269)附录E:通用编码器扩展卡使用说明 (270)E.1 概述 (270)E.2 机械安装与控制端子功能说明 (270)E.3 MD38PG4卡使用说明 (274)E.4 MD38PGMD卡使用说明 (275)附录F:CANlink通信扩展卡(MD38CAN1)使用说明 (276)F.1 概述 (276)F.2 机械安装与控制端子功能说明 (276)附录G:CANopen通讯扩展卡(MD38CAN2)使用说明 (277)G.1 概述 (277)G.2 机械安装与控制端子功能说明 (277)附录H:RS-485通讯扩展卡(MD38TX1)使用说明 (279)H.1 概述 (279)H.2 机械安装与控制端子功能说明 (279)附录I:MD380通讯数据地址定义 (280)I.1 MD380功能码数据 (280)I.2 MD380非功能码数据 (281)附录J:MD380 Modbus通讯协议 (283)J.1 协议内容 (283)J.2 通讯资料结构 (283)J.3 功能码参数地址标示规则 (286)J.4 FD组通讯参数说明 (289)附录K:手册新版本(V1.4)功能码变更说明 (290)附录L:版本变更记录 (292)3PH AC380-440V 3.4A 50/60Hz按键进行切换,进入各组的功能码之后的查阅或修改。
MD320/MD320N用户手册 前言前 言首先感谢您购买MD320/MD320N系列变频器!本使用说明书介绍了如何正确使用MD320/MD320N系列变频器。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本使用说明书。
另外,请在理解产品的安全注意事项后再使用该产品。
注意事项● 为了说明产品的细节部分,本说明书中的图例有时为卸下外罩或安全遮盖物的状态。
使用本产品时,请务必按规定装好外壳或遮盖物,并按照说明书的内容进行操作。
● 本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
● 由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
● 由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
● 如果您使用中仍有一些使用问题不明,请与本公司客户服务中心联系。
全国统一服务电话:400-777-1260前言 MD320/MD320N用户手册简 介MD系列变频器是汇川技术推出的代表未来变频器发展方向的新一代模块化高性能变频器。
与传统意义上的变频器相比,在满足客户不同性能、功能需求方面,它不是通过多个系列产品来实现(从而增加额外的制造、销售、使用、维护成本),而是在客户需求合理细分的基础上,进行模块化设计,通过单系列产品的多模块灵活组合,创建一个客户化量身定做的平台。
MD系列变频器开创了未来变频器领域的三个新概念:1)它首创了新一代变频器三层模块化的结构标准,如图 1示;2)它首创了将用户需求进行电机驱动、通用功能和专用功能等主模块及各种子模块划分的物理标准,如图1所示;3)它引领了将矢量控制技术大众化的行业新趋势。
这些概念将给变频器产业带来深远的影响。
模块化结构的底层、中间层和顶层描述如下:图 1 传统变频器与MD系列模块化变频器比较1)MD系列变频器的底层模块是高性能电机控制模块,它包含V/F、无速度传感器矢量控制(SVC)和矢量控制(VC),主要完成对电机的高性能控制与全方位保护,它可以通过多种通道接受运行指令来控制电机,还可以通过编码器接口,进行闭环矢量控制。
张力控制专用变频器MD330用户手册(ver:060.13)第一章概述本手册需与《MD320用户手册》配合使用。
本手册仅介绍与卷曲张力控制有关的部分,其他的基本功能请参考《MD320用户手册》。
当张力控制模式选为无效时,变频器的功能与MD320完全相同。
MD330用于卷曲控制,可以自动计算卷径,在卷径变化时仍能够获得恒张力效果。
在没有卷径变化的场合实现恒转矩控制,建议使用MD320变频器。
选用张力控制模式后,变频器的输出频率和转矩由张力控制功能自动产生,F0组中频率源的选择将不起作用。
第二章张力控制原理介绍一、典型收卷张力控制示意图二、张力控制方案介绍对张力的控制有两个途径,一是可控制电机的输出转矩,二是控制电机转速,对应这两个途径,MD330设计了两种张力控制模式。
A、开环转矩控制模式开环是指没有张力反馈信号,变频器仅靠控制输出频率或转矩即可达到控制目的,与开环矢量或闭环矢量无关。
转矩控制模式是指变频器控制的是电机的转矩,而不是频率,输出频率是跟随材料的速度自动变化。
根据公式F=T/R(其中F为材料张力,T为收卷轴的扭矩,R为收卷的半径),可看出,如果能根据卷径的变化调整收卷轴的转矩,就可以控制材料上的张力,这就是开环转矩模式控制张力的根据,其可行性还有一个原因是材料上的张力只来源于收卷轴的转矩,收卷轴的转矩主要作用于材料上。
MD系列变频器在闭环矢量(有速度传感器矢量控制)下可以准确地控制电机输出转矩,使用这种控制模式,必须加装编码器(变频器要配PG卡)。
与开环转矩模式有关的功能模块:1、张力设定部分:用以设定张力,实际使用中张力的设定值应与所用材料、卷曲成型的要求等实际情况相对应,需由使用者设定。
张力锥度可以控制张力随卷径增加而递减,用于改善收卷成型的效果。
2、卷径计算部分:用于计算或获得卷径信息,如果用线速度计算卷径需用到线速度输入功能部分,如果用厚度累计计算卷径需用到厚度累计计算卷径相关参数功能部分。
电动车驱动器用户手册
深圳市汇川技术股份有限公司
前言 IEVD030系列电动车驱动器用户手册
目录
前言 (1)
第1章安全信息及注意事项 (8)
1.1 安全事项 (8)
1.2 注意事项 (10)
1.3 环境要求和存储、运输特性 (11)
第2章产品信息 (14)
2.1 电机控制器特色功能介绍 (14)
2.2 命名规则 (16)
2.3 铭牌 (16)
2.4 IEVD系列电机控制器规格 (17)
2.5 技术规范 (18)
2.6 选型指导 (19)
2.7 选配件 (20)
第3章机械与电气安装 (22)
3.1 机械安装 (22)
3.2 电气安装 (23)
第4章电气设计 (30)
4.1 IEVD系列电机控制器工作原理简介 (30)
4.2 纯电动汽车端子控制方式电气设计方案 (31)
4.3 纯电动汽车通讯控制方式电气设计方案 (34)
4.4 辅助动力控制电气设计方案 (36)
第5章调试说明 (40)
5.1 首次匹配台架标定 (40)
5.2 纯电动汽车端子控制方式调试说明 (42)
5.3 纯电动汽车通讯控制方式调试说明 (43)
5.4 辅助动力控制调试说明 (44)
第6章外引键盘的操作与显示 (46)
6.1 操作与显示界面介绍 (46)
6.2 功能码查看、修改方法说明 (47)
6.3 切换菜单模式的操作方式 (48)
6.4 电机控制器功能码的组织方式 (49)
6.5 多功能按键的定义与操作 (49)
6.6 状态参数的查阅 (49)
6.7 密码设置 (51)
6.8 电机参数自动调谐 (51)
第7章维护保养与故障诊断 (54)
7.1 维护与保养 (54)
7.2 故障诊断及对策 (55)
7.3 常见故障及其处理方法 (59)
第8章功能参数表 (62)
第9章参数说明 (84)
A0组系统基本参数 (84)
B0组常用功能参数 (84)
B1组电机参数 (90)
B2组矢量控制参数 (92)
B4组数字量输入端子 (94)
B5组模拟量输入端子 (99)
B6组数字量输出端子 (102)
B7组模拟量输出端子 (106)
BA组故障与保护 (107)
C4组同步机控制参数 (112)
D3组控制优化参数 (113)
D4组转矩控制参数 (115)
D5组辅助功能参数 (115)
DE组功能码管理 (116)
附录A CAN通讯协议 (122)
A.1 系统拓扑结构 (122)
A.2 网络硬件规范 (122)
A.3 网络协议说明 (122)
A.4网络报文结构 (123)
A.5通讯协议 (123)
附录B 版本变更记录 (126)
液体冷却机型风冷机型电机控制器特色功能介绍
系列电机控制器具备如下特色功能,以满足电动汽车驱动的特殊需求,部分机型并不一定具备所有的特色功能,可能需要相应的硬件和配套的软件策略加以实现,需要汽车厂家事先确
认或订制。
倒车限速功能
根据行业应用的需求,电机控制器分别对前进和倒退的最高车速分别进行限制,限制车速根据
整车动力性能要求进行标定,出于安全驾驶的目的,倒车最高时速一般限制在30km/h以内,前进的最高车速应根据电机的最高转速、电池的输出能力以及整车重量等因素进行设置,一般限100km/h左右。
误挂档保护功能
为了避免高速运行中的车辆在档位发生误操作时车身出现剧烈抖动,提高车辆在误操作时的舒
适性和安全性,当车辆超过一定安全车速(如5km/h)出现档位切换时,电机控制器先进行减速,当车速降至安全车速以下后响应新的档位信号。
防溜坡功能
为了避免车辆在坡道上频繁启停时在制动踏板和油门踏板切换的过程中出现后溜,提高车辆驾
驶的舒适性,车辆在坡道短暂(通过BA-08设置)的停留不需要通过踩刹车和拉手刹等操作来进行制动,电机控制器通过当前档位信号和转速编码器反馈的转速信号判断车辆是否进入或退
500Hz
电动汽车IEVD系
列驱动器
A
风冷驱动器
A≥100mm
水冷驱动器
A≥5mm
外引键盘
负载电机用电机控制器参数设置:
外引键盘
数据显示区
图6-2 操作面板示意图
:灯亮时表示电机控制器处于运转状态,灯灭时表示电机控制器处于停机状态。
键盘操作、端子操作与远程操作(通信控制)指示灯:
LOCAL/REMOT:熄灭面板起停控制方式
LOCAL/REMOT:常亮端子起停控制方式
LOCAL/REMOT:闪烁通讯起停控制方式。