机械原理课程设计——内燃机设计——凸轮轮廓线程序、图像
- 格式:doc
- 大小:52.00 KB
- 文档页数:4
目录(一)机械原理课程设计的目的和任务 (2)(二)从动件(摆杆)及滚子尺寸的确定 (4)(三) .............................. 原始数据分析5(四) ............. 摆杆的运动规律及凸轮轮廓线方程6(五) ................................ 程序方框图8(六) .............................. 计算机源程序9(七) ....................... 程序计算结果及其分析14(八) .......................... 凸轮机构示意简图16(九) .................................. 心得体会16(十)参考书籍 (18)(一)机械原理课程设计的目的和任务一、机械原理课程设计的目的:1、机械原理课程设计是一个重要实践性教学环节。
其目的在于:进一步巩固和加深所学知识;2、培养学生运用理论知识独立分析问题、解决问题的能力;3、使学生在机械的运动学和动力分析方面初步建立一个完整的概念;4、进一步提高学生计算和制图能力,及运用电子计算机的运算能力。
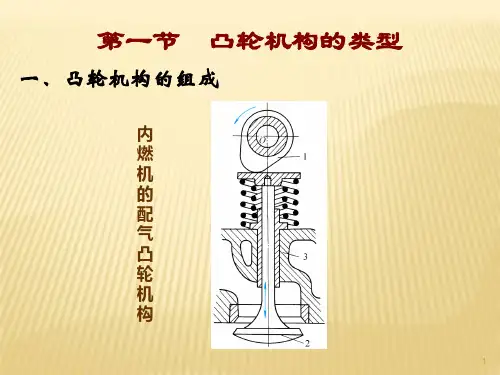
二、机械原理课程设计的任务:1、摆动从动件杆盘型凸轮机构2、采用图解法设计:凸轮中心到摆杆中心A的距离为160mm,凸轮以顺时针方向等速回转,摆杆的运动规律如表:3、设计要求:①确定合适摆杆长度②合理选择滚子半径rr③选择适当比例,用几何作图法绘制从动件位移曲线并画于图纸上;④用反转法绘制凸轮理论廓线和实际廓线,并标注全部尺寸(用A2图纸)⑤将机构简图、原始数据、尺寸综合方法写入说明书4、用解析法设计该凸轮轮廓,原始数据条件不变,要写出数学模型,编制程序并打印出结果备注:1、尖底(滚子)摆动从动件盘形凸轮机构压力角:临f[acos*M)—I]tan:asin伴°十屮)在推程中,当主从动件角速度方向不同时取“-”号,相同时取“ +” 号。

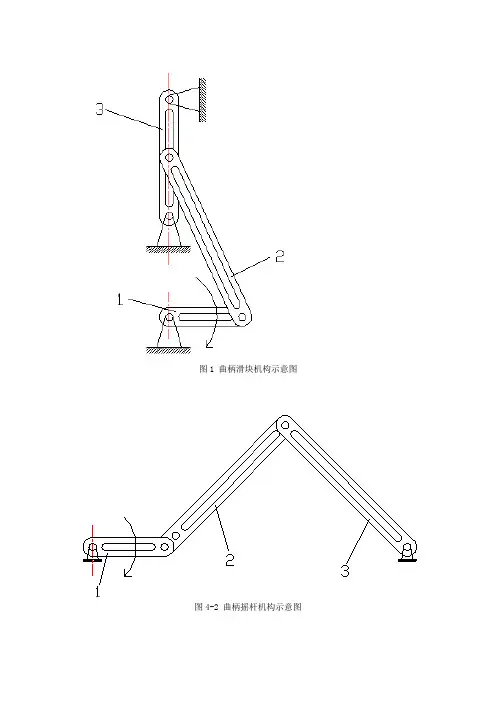
图1 曲柄滑块机构示意图图4-2 曲柄摇杆机构示意图
图4-3 内燃机机构示意图图4-4 精压机机构示意图
图4-5 牛头刨床机构示意图
图6 两齿轮—曲柄摇杆机构示意图
图7 喷气织机开口机构示意图图4-8 冲压机构示意图
图4-9 筛料机构示意图图4-10 插床机构示意图
图11 凸轮—连杆组合机构示意图图12 凸轮—五连杆机构示意图
图13 行程放大机构示意图图14 自卸货车翻转机构示意图
图15 齿轮齿条—双曲柄滑块机构示意图图16 盘型凸轮(尖端推杆)机构示意图
图17 冲压机构示意图
图18 双摆杆摆角放大机构示意图
图19 双摇杆机构示意图。
凸轮理论轮廓线与实际轮廓线数据x y x1 y1 0 0 35 0 30 5 -3.06104 34.9879 -2.98506 29.9885 10 -6.16038 34.9373 -5.96929 29.9409 15 -9.32665 34.8075 -8.95079 29.8217 20 -12.5705 34.5372 -11.9229 29.5794 25 -15.8791 34.0528 -14.8684 29.156 30 -19.2135 33.2787 -17.756 28.4959 35 -22.5107 32.1486 -20.5396 27.5536 40 -25.6887 30.6146 -23.163 26.2995 45 -28.6546 28.6546 -25.5658 24.7228 50 -31.3147 26.2762 -27.6908 22.8313 55 -33.5852 23.5166 -29.4895 20.6488 60 -35.4018 20.4392 -30.9252 18.2121 65 -36.727 17.1261 -31.9759 15.5683 70 -37.5544 13.6687 -32.6356 12.7712 75 -37.909 10.1577 -32.9168 9.87707 80 -37.8432 6.67277 -32.8502 6.93899 85 -37.4301 3.27471 -32.4829 3.99979 90 -36.7538 9.84813e-007 -31.8734 1.08708 95 -35.8983 -3.14069 -31.0846 -1.78862 100 -34.9373 -6.16038 -30.1769 -4.6311 105 -33.9248 -9.09012 -29.2009 -7.45161 110 -32.8892 -11.9707 -28.1908 -10.2606 115 -31.7208 -14.7916 -27.1892 -12.6785 120 -30.3109 -17.5 -25.9808 -15 125 -28.6703 -20.0752 -24.5746 -17.2073 130 -26.8116 -22.4976 -22.9813 -19.2836 135 -24.7487 -24.7487 -21.2132 -21.2132 140 -22.4976 -26.8116 -19.2836 -22.9813 145 -20.0752 -28.6703 -17.2073 -24.5746 150 -17.5 -30.3109 -15 -25.9808 155 -14.7916 -31.7208 -12.6785 -27.1892 160 -11.9707 -32.8892 -10.2606 -28.1908 165 -9.05867 -33.8074 -7.76457 -28.9778 170 -6.07769 -34.4683 -5.20945 -29.5442 175 -3.05045 -34.8668 -2.61467 -29.8858 180 -1.87564e-006 -35 -1.60769e-006 -30 185 3.05045 -34.8668 2.61467 -29.8858 190 6.07768 -34.4683 5.20944 -29.5442 195 9.05866 -33.8074 7.76457 -28.9778 200 11.9707 -32.8892 10.2606 -28.1908205 14.7916 -31.7208 12.6785 -27.1892 210 17.5 -30.3109 15 -25.9808 215 20.0752 -28.6703 17.2073 -24.5746 220 22.4976 -26.8116 19.2836 -22.9813 225 24.7487 -24.7487 21.2132 -21.2132 230 26.8116 -22.4976 22.9813 -19.2836 235 28.6703 -20.0752 24.5746 -17.2073 240 30.3109 -17.5 25.9808 -15 245 31.7208 -14.7916 27.1892 -12.6785 250 32.8892 -11.9707 28.1908 -10.2606 255 33.8074 -9.05867 28.9778 -7.76457 260 34.4683 -6.07769 29.5442 -5.20945 265 34.8668 -3.05045 29.8858 -2.61467 270 35 -2.81346e-006 30 -2.41154e-006 275 34.8668 3.05045 29.8858 2.61467 280 34.4683 6.07768 29.5442 5.20944 285 33.8074 9.05866 28.9778 7.76457 290 32.8892 11.9707 28.1908 10.2606 295 31.7208 14.7916 27.1892 12.6785 300 30.3109 17.5 25.9808 15 305 28.6703 20.0752 24.5746 17.2073 310 26.8116 22.4976 22.9813 19.2836 315 24.7487 24.7487 21.2132 21.2132 320 22.4976 26.8116 19.2836 22.9813 325 20.0752 28.6703 17.2073 24.5746 330 17.5 30.3109 15 25.9808 335 14.7916 31.7208 12.6786 27.1892 340 11.9707 32.8892 10.2606 28.1908 345 9.05867 33.8074 7.76457 28.9778 350 6.07769 34.4683 5.20945 29.5442 355 3.05045 34.8668 2.61468 29.8858 360 3.75129e-006 35 3.21539e-006 30 Press any key to continue凸轮理论轮廓线与实际轮廓线数据#include<iostream.h>#include<math.h>#include<iomanip.h>#define PI 3.1415926void main(){double p,x,y,m,n,x1,y1,r=5;//分别代表角度值、理论x、理论y、x对角度的导数,y对角度的导数,实际x,实际y,磙子半径cout<<setw(15)<<"x"<<setw(20)<<"y"<<setw(20)<<"x1"<<setw(20)<<"y1"<<endl;for(p=0;p<=360;p=p+5){if(p<=55){x=-38*sin(p*PI/180)+3*cos(p*PI/55)*sin(p*PI/180);y=38*cos(p*PI/180)-3*cos(p/55*PI)*cos(p*PI/180);m=(38-3*cos(p/55*PI))*cos(p*PI/180)+180/55*3*sin(p*PI/180)*sin(p*PI/55);n=(-38+3*cos(p/55*PI))*sin(p*PI/180)+180/55*3*cos(p*PI/180)*sin(p*PI/55);x1=x-r*n/sqrt((m*m+n*n));y1=y-r*m/sqrt((m*m+n*n));cout<<p<<setw(15)<<x<<setw(20)<<y<<setw(20)<<x1<<setw(20)<<y1<<endl;}else if(p<=110){x=-38*sin(p*PI/180)-3*cos((p-55)*PI/55)*sin(p*PI/180);y=38*cos(p*PI/180)+3*cos((p-55)/55*PI)*cos(p*PI/180);m=(38+3*cos((p-55)/55*PI))*cos(p*PI/180)-180/55*3*sin(p*PI/180)*sin((p-55)*PI/55);n=(-38-3*cos((p-55)/55*PI))*sin(p*PI/180)-180/55*3*cos(p*PI/180)*sin((p-55)*PI/55);x1=x-r*n/sqrt((m*m+n*n));y1=y-r*m/sqrt((m*m+n*n));cout<<p<<setw(15)<<x<<setw(20)<<y<<setw(20)<<x1<<setw(20)<<y1<<endl;}else{ x=-35*sin(p*PI/180);y=35*cos(p*PI/180);m=35*cos(p*PI/180);n=-35*sin(p*PI/180);x1=x-r*n/sqrt((m*m+n*n));y1=y-r*m/sqrt((m*m+n*n));cout<<p<<setw(15)<<x<<setw(20)<<y<<setw(20)<<x1<<setw(20)<<y1<<endl;}}}。